 電子發(fā)燒友App
電子發(fā)燒友App


自動(dòng)駕駛繞不開(kāi)的一個(gè)話題那就是激光雷達(dá)和攝像頭到底哪個(gè)更出色,這個(gè)問(wèn)題一直在行業(yè)內(nèi)爭(zhēng)論不休,兩大派系各執(zhí)一詞,都能講出一大堆的理由為什么用此非彼,其實(shí)要想明白為什么會(huì)有這個(gè)爭(zhēng)論,我們就要先了解這兩大技術(shù)路線背后的原理是什么,各自有哪些優(yōu)勢(shì)和不足。
自動(dòng)駕駛將汽車(chē)的駕駛能力及駕駛責(zé)任逐步由人轉(zhuǎn)移到汽車(chē),其主要包括感知、決策和執(zhí)行三大核心環(huán)節(jié)。其中,感知環(huán)節(jié)相當(dāng)于人的眼睛和耳朵,主要通過(guò)車(chē)載攝像頭、激光雷達(dá)、毫米波達(dá)等各類(lèi)車(chē)載傳感器在行車(chē)過(guò)程中完成對(duì)環(huán)境及車(chē)輛的感知、搜集周?chē)h(huán)境數(shù)據(jù)并將其傳輸?shù)經(jīng)Q策層;決策環(huán)節(jié)相當(dāng)于人的大腦,主要通過(guò)操作系統(tǒng)、芯片與計(jì)算平臺(tái)等對(duì)接收到的數(shù)據(jù)進(jìn)行實(shí)時(shí)處理并輸出相應(yīng)的操作與指令任務(wù);執(zhí)行端則相當(dāng)于人的四肢,將接收到的操作指令執(zhí)行到動(dòng)力供給、方向控制、車(chē)燈控制等車(chē)輛終端部分。本次我們將著重說(shuō)說(shuō)感知層,因?yàn)楦兄鳛?a href="http://www.nxhydt.com/v/" target="_blank">智能駕駛的先決條件,其探測(cè)精度、廣度與速度直接影響自動(dòng)駕駛的行駛安全。并且感知層獲取的數(shù)據(jù)將直接影響決策層的判斷與執(zhí)行層的操作,可見(jiàn)在自動(dòng)駕駛中的地位至關(guān)重要。?
激光雷達(dá)vs視覺(jué)感知,自動(dòng)駕駛兩大派系正面交鋒
自動(dòng)駕駛領(lǐng)域兩個(gè)派系的劃分——純視覺(jué)感知派、激光雷達(dá)派。
視覺(jué)派認(rèn)為人類(lèi)既然可以通過(guò)視覺(jué)信息+大腦處理,成為一個(gè)合格的駕駛者。那么攝像頭+深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)+計(jì)算機(jī)硬件,也可以達(dá)到類(lèi)似的效果。近期代表企業(yè)特斯拉推出基于純視覺(jué)方案的FSD Beta,徹底放棄毫米波雷達(dá)。百度發(fā)布L4級(jí)別純視覺(jué)方案Apollo lite,同樣踏上了自動(dòng)駕駛的南坡之路。
激光雷達(dá)派則是以Waymo為代表的Robotaxi企業(yè),使用機(jī)械式激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)以及多路攝像頭完成L4級(jí)別的商業(yè)量產(chǎn)落地。
純視覺(jué)自動(dòng)駕駛方案從產(chǎn)品分析,目前特斯拉的產(chǎn)品還處于L2的階段,從今年第一季度的財(cái)報(bào)上看純視覺(jué)自動(dòng)駕駛方案是這樣解釋?zhuān)耗壳暗缆方煌ㄏ到y(tǒng)是基于人類(lèi)視覺(jué)感知神經(jīng)網(wǎng)絡(luò),8個(gè)攝像頭覆蓋360°,比人類(lèi)感知范圍更大更安全;對(duì)現(xiàn)實(shí)道路的技術(shù)還有待突破,自動(dòng)駕駛不會(huì)很快成為主流。再看Apollo lite,2020年底百度發(fā)布高階智能駕駛解決方案ANP(Apollo Navigation Pilot),宣稱(chēng)可以支持高速、城市環(huán)線、城市道路使用,搭載10路攝像頭、具備360°環(huán)視感知,探測(cè)距離達(dá)240米,應(yīng)用30+深度學(xué)習(xí)網(wǎng)絡(luò),單卡GPU,算力小于30TOPs。從L4應(yīng)用降維至L2+級(jí)領(lǐng)航輔助駕駛,依靠10相機(jī)感知系統(tǒng),實(shí)現(xiàn)不依賴(lài)高線數(shù)機(jī)械式激光雷達(dá)的端到端閉環(huán)自動(dòng)駕駛。
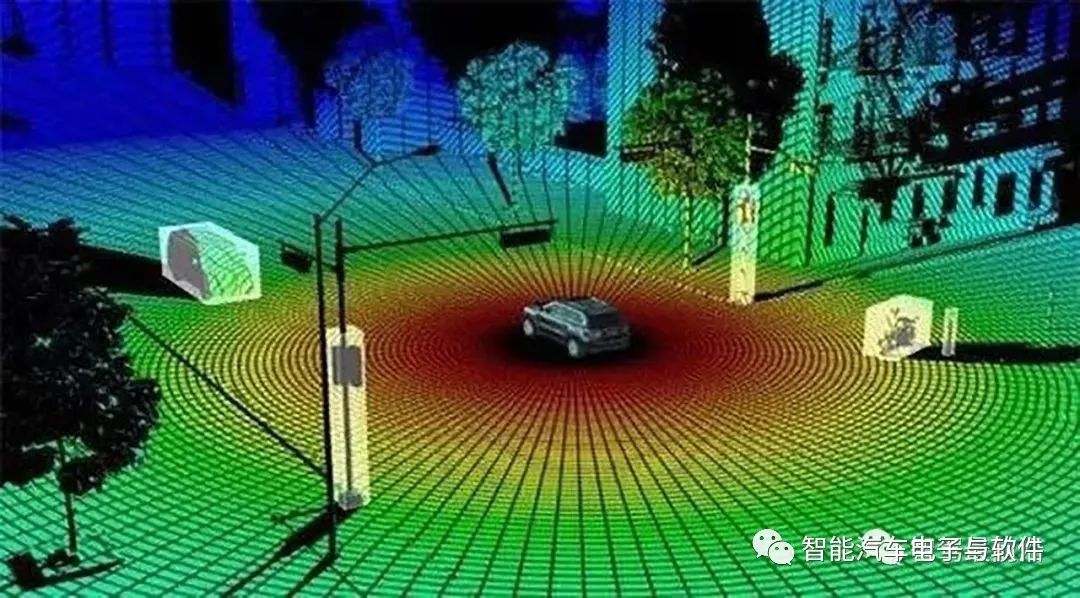
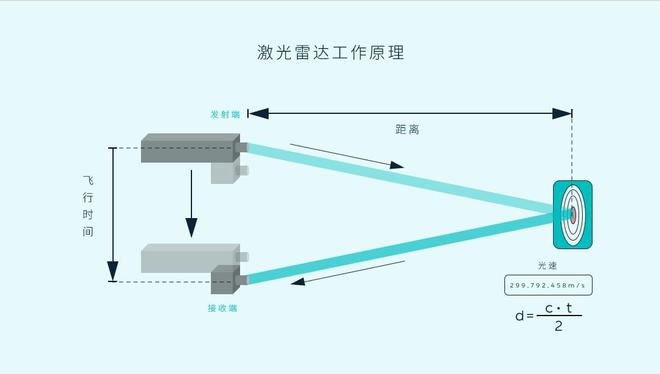
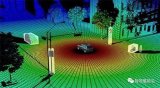
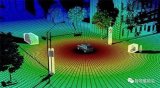
激光雷達(dá)是一種用于精準(zhǔn)獲取物體三維位置信息的傳感器,本質(zhì)上是激光探測(cè)和測(cè)距,其原理是通過(guò)發(fā)射與接收激光來(lái)探測(cè)與目標(biāo)物之間的距離,再根據(jù)目標(biāo)物表面的反射能量大小、反射波譜幅度、頻率和相位等信息,精確繪制出目標(biāo)物的三維結(jié)構(gòu)信息。而憑借著在目標(biāo)輪廓測(cè)量、角度測(cè)量、光照穩(wěn)定性和通用障礙物檢出等方面所具有的極佳性能,激光雷達(dá)正在成為L(zhǎng)4級(jí)及以上自動(dòng)駕駛的核心配置。
3D激光雷達(dá)在無(wú)人駕駛車(chē)輛的定位、路徑規(guī)劃、決策、感知等方面有著重要的作用。2022-2025年之間預(yù)計(jì)絕大部分的主機(jī)廠會(huì)量產(chǎn)上激光雷達(dá),從國(guó)際上看,沃爾沃和Luminar宣布量產(chǎn),國(guó)內(nèi)蔚來(lái)選擇圖達(dá)通的激光雷達(dá)作為ET7的標(biāo)配;小鵬P5搭載了大疆旗下覽沃的激光雷達(dá);理想也與禾賽科技展開(kāi)了下一代車(chē)型的合作。由此看來(lái),激光雷達(dá)仍然是絕大多數(shù)企業(yè)走上自動(dòng)駕駛的必經(jīng)之路。
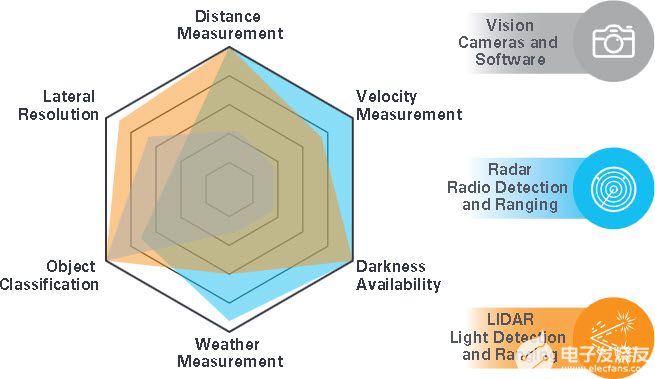
從技術(shù)特點(diǎn)的角度來(lái)看:視覺(jué)方案中的圖像傳感器能以高幀率、高分辨率獲取周?chē)鷱?fù)雜的環(huán)境信息,且價(jià)格便宜。但圖像傳感器是一種被動(dòng)式傳感器,其本身并不發(fā)光,成像質(zhì)量受到環(huán)境亮度影響較大,在惡劣環(huán)境下完成感知任務(wù)的難度會(huì)大幅提升。
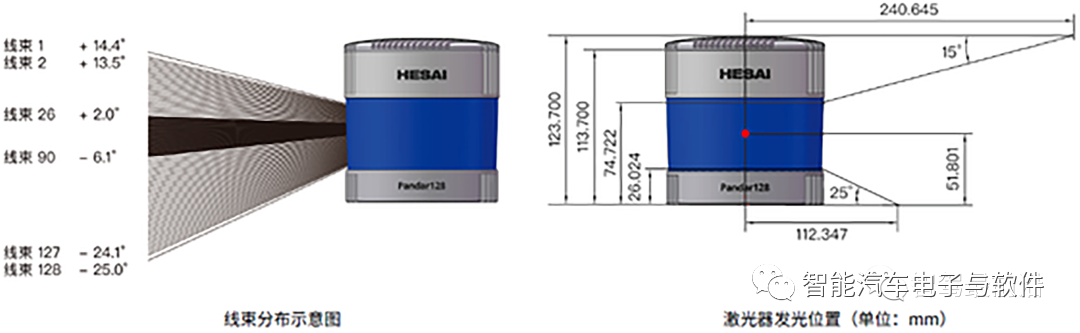
激光雷達(dá)是一種主動(dòng)式傳感器,通過(guò)發(fā)射脈沖激光并探測(cè)目標(biāo)的散射光特性獲取目標(biāo)的深度信息,具有精度高、范圍大、抗干擾能力強(qiáng)的特性。但是,激光雷達(dá)獲取的數(shù)據(jù)稀疏無(wú)序、難以直接利用,且激光單色的特性讓其無(wú)法獲取顏色和紋理信息,雖然對(duì)于周邊環(huán)境測(cè)距描繪的能力突出,但卻因?yàn)槿秉c(diǎn)太致命,所以必須搭配其它傳感器互補(bǔ)使用。從商業(yè)量產(chǎn)的角度來(lái)看:目前激光雷達(dá)感知能力是略強(qiáng)于純視覺(jué)的,很多主機(jī)廠商和一級(jí)供應(yīng)商為加速量產(chǎn)落地,難免會(huì)通過(guò)過(guò)多使用激光雷達(dá)來(lái)回避視覺(jué)識(shí)別算法、芯片、定位建圖等問(wèn)題。馬斯克不止一次提過(guò)依賴(lài)激光雷達(dá)的公司都可能無(wú)任何出路,或許是跟激光雷達(dá)成本過(guò)高有關(guān)。華為在年初宣布成功研發(fā)首款96線中長(zhǎng)距車(chē)規(guī)級(jí)高性能激光雷達(dá),具備全場(chǎng)景150米的測(cè)距能力,擁有120°*25°大視野,可以滿足對(duì)城區(qū)、高速等場(chǎng)景的人、車(chē)測(cè)距要求。同時(shí)水平、垂直線束均勻分布,不存在拼接、抖動(dòng)等情況,形成穩(wěn)定的點(diǎn)云對(duì)后端感知算法也非常友好,滿足遠(yuǎn)距離小障礙物、近距離加塞、近端突出物、隧道、十字路口無(wú)保護(hù)左拐、地庫(kù)等復(fù)雜路況和獨(dú)特場(chǎng)景,更符合中國(guó)當(dāng)下復(fù)雜的路況環(huán)境。價(jià)格號(hào)稱(chēng)從原本的2000美金一套降到200美金左右。特斯拉近期也做了對(duì)激光雷達(dá)的檢測(cè),不知純視覺(jué)派會(huì)不會(huì)因價(jià)格優(yōu)勢(shì)的出現(xiàn)做出改變。?
激光雷達(dá)與視覺(jué)感知的優(yōu)劣對(duì)比,既對(duì)立又互補(bǔ)
到目前為止,小鵬、蔚來(lái)、理想、極狐、長(zhǎng)城、智己、上汽R、Lucid、沃爾沃和廣汽都已經(jīng)明確將量產(chǎn)搭載激光雷達(dá)的車(chē)型,而首款搭載激光雷達(dá)的量產(chǎn)車(chē)小鵬P5也已經(jīng)正式上市。
激光雷達(dá)的優(yōu)勢(shì)在于精度較高,探測(cè)距離遠(yuǎn),可以在一些極端天氣下和夜間做到比攝像頭更高的精準(zhǔn)度,防止車(chē)輛的誤判,提升安全的冗余度。但目前仍存在成本較高、難以量產(chǎn)等問(wèn)題。目前激光雷達(dá)分為三類(lèi)分別是機(jī)械式、混合固態(tài)式以及純固態(tài)式。這三類(lèi)有各自的優(yōu)缺點(diǎn),例如機(jī)械式發(fā)展最成熟,掃描速度快可以360度全方位探測(cè),但是由于其體積較大很難裝車(chē)量產(chǎn),造價(jià)也是一個(gè)大難題;混合固態(tài)成本低,適合大規(guī)模量產(chǎn)但是視野有限,360度就不行了;純固態(tài)將是未來(lái)發(fā)展趨勢(shì),有OPA光學(xué)相控陣和Flash兩種技術(shù)路線,但同樣等待技術(shù)的進(jìn)一步突破才能實(shí)現(xiàn)量產(chǎn)。目前來(lái)看混合固態(tài)中的MEMS路線將會(huì)是激光雷達(dá)發(fā)展的主流也是最容易實(shí)現(xiàn)前裝量產(chǎn)的。

機(jī)械式、半固態(tài)式、固態(tài)式激光雷達(dá)特點(diǎn)
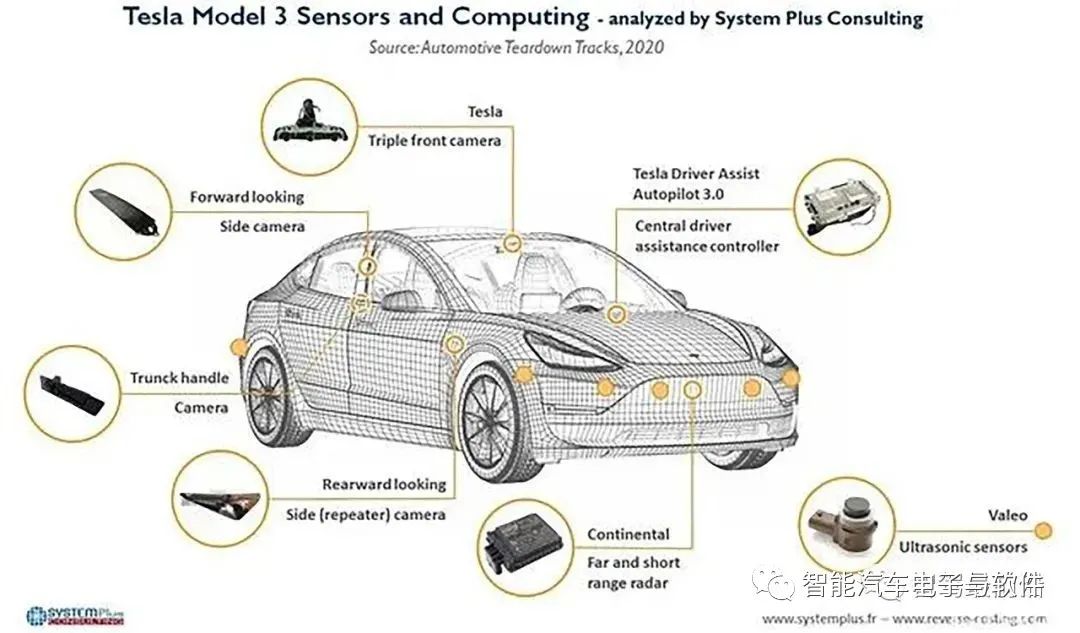
視覺(jué)方案所獲數(shù)據(jù)與人眼感知的真實(shí)世界更為相似,有輕硬件、重軟件的特性。由于攝像頭的價(jià)格低廉,因此視覺(jué)方案成本優(yōu)勢(shì)明顯且更易通過(guò)車(chē)規(guī)測(cè)試。此外,攝像頭所獲的圖像數(shù)據(jù)與人眼感知的真實(shí)世界更為相似,形態(tài)上最接近人類(lèi)駕駛,高分辨率、高幀率的成像技術(shù)也使得感知到的環(huán)境信息更為豐富。然而,攝像頭在黑暗環(huán)境中感知受限,精度及安全性有所下降。且由于視覺(jué)方案在硬件要求降低的背景下,其對(duì)軟件的要求明顯提高,即需要依靠強(qiáng)大的算法才能保證圖像處理、命令下達(dá)以及處理的效率。在ADAS階段,決策權(quán)仍在在駕駛員手中,其對(duì)汽車(chē)的軟件算法要求相對(duì)較低,以Mobileye為代表的視覺(jué)方案被多數(shù)整車(chē)廠采用。然而,隨著智能駕駛邁向L3及以上,自動(dòng)駕駛平臺(tái)將接替人的大腦進(jìn)行駕駛決策,對(duì)算法和AI的能力要求明顯提升,目前僅特斯拉、百度、Mobileye等具備軟件和算法基因的廠商完全采用或兼顧視覺(jué)方案。純視覺(jué)解決方案多以黑盒方案為主,且L3及以上自動(dòng)駕駛升級(jí)難度大,傳統(tǒng)整車(chē)廠搭載意愿不強(qiáng)。特斯拉憑借“影子模式”與超強(qiáng)算法構(gòu)筑自動(dòng)駕駛迭代閉環(huán),其他車(chē)企難以復(fù)制。特斯拉對(duì)汽車(chē)的定義是極簡(jiǎn)化、科技化,其一直在汽車(chē)上做減法,對(duì)車(chē)輛線束長(zhǎng)度、零部件數(shù)量、生產(chǎn)制造工序都進(jìn)行大幅下調(diào)。在感知方案的選擇上,特斯拉貫徹成本更優(yōu)的視覺(jué)方案,在Model3上采用12個(gè)超聲波雷達(dá)、8個(gè)攝像頭和1個(gè)前置雷達(dá)收集周邊信息,通過(guò)其強(qiáng)大的融合算法迅速構(gòu)建車(chē)輛周邊的3D模型,在汽車(chē)行駛中做出快速?zèng)Q策。
由于2D圖像對(duì)物體的左后角的檢測(cè)(車(chē)長(zhǎng)的判斷)存在一定盲區(qū),車(chē)輛尾部的傾斜與向上收窄的設(shè)計(jì)加劇了對(duì)整體寬度的低估,因此,視覺(jué)方案的關(guān)鍵便是通過(guò)算法根本上解決視覺(jué)信息的準(zhǔn)確處理,將攝像頭捕捉到的2D平面圖像轉(zhuǎn)換成精確的3D模型。特斯拉在自動(dòng)駕駛領(lǐng)域的全棧自研以及其在“模式識(shí)別模型”領(lǐng)域的領(lǐng)先地位(即數(shù)據(jù)規(guī)模龐大、數(shù)據(jù)覆蓋多樣及數(shù)據(jù)場(chǎng)景真實(shí))成為其貫徹視覺(jué)融合方案的護(hù)城河。
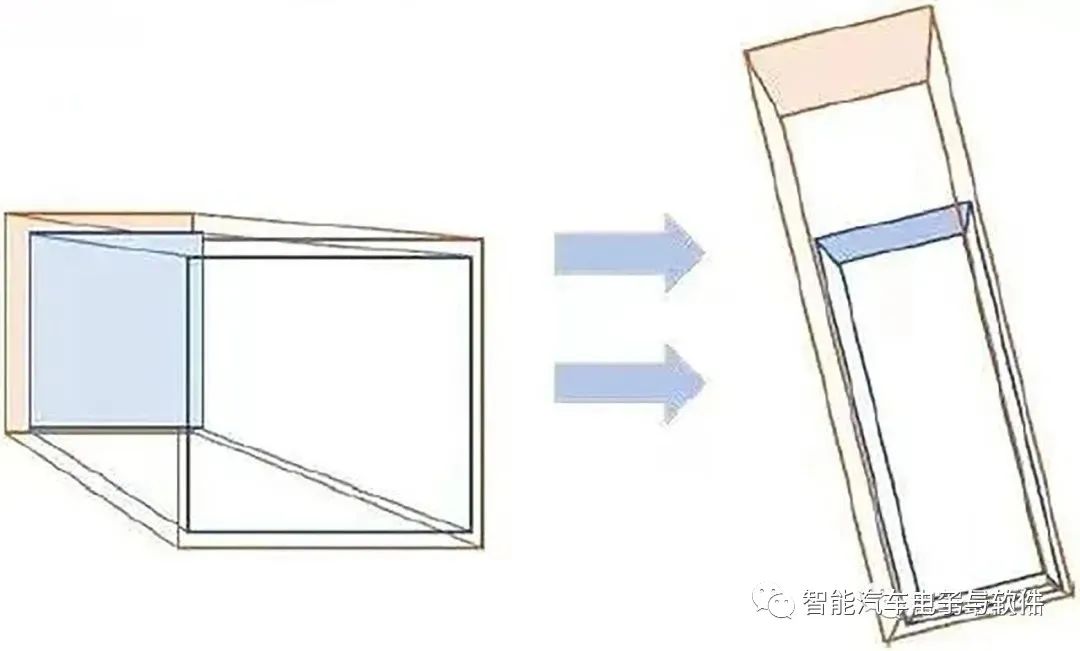
攝像頭捕捉的2D圖像難以判斷車(chē)長(zhǎng)
此外,特斯拉的“影子模式”可有效控制算法訓(xùn)練成本,這一模式下數(shù)據(jù)搜集系統(tǒng)如實(shí)時(shí)跟隨駕駛員的“影子”,始終觀察外部環(huán)境與駕駛員的動(dòng)作。若在某個(gè)特定場(chǎng)景中駕駛員的操作與“影子”的預(yù)判不符,則此次數(shù)據(jù)會(huì)傳輸?shù)教厮估姆?wù)器中,對(duì)算法進(jìn)行修正性訓(xùn)練,在下次同場(chǎng)景時(shí)予以更正。百度、Mobileye采用前裝用視覺(jué)、Robotaxi用激光雷達(dá)的雙線并行策略,優(yōu)化其感知效果。在前裝領(lǐng)域,全球AI算法領(lǐng)先企業(yè)百度于2020年12月推出名為ANP的“輕傳感器、輕算量、強(qiáng)感知”視覺(jué)方案。在成本不敏感的Robotaxi領(lǐng)域,百度選擇擁抱激光雷達(dá),與激光雷達(dá)公司禾賽科技一起定制激光雷達(dá),不僅提升了感知力和可靠性,成本也大幅下降。
另一方面,以純視覺(jué)傳感器方案聞名的Mobileye,通過(guò)7個(gè)長(zhǎng)距攝像頭和4個(gè)泊車(chē)攝像頭打造了自己的視覺(jué)方案。其中,前置攝像頭處于主要感知位,具備120度、800萬(wàn)像素性能,前、后則共布置4個(gè)角攝像頭,側(cè)后視鏡、前后保險(xiǎn)杠提供190度的廣角攝像頭。這些感知攝像頭與數(shù)據(jù)處理端的2個(gè)EyeQ5芯片組成了Mobileye的純視覺(jué)系統(tǒng)方案,支持汽車(chē)安全地行駛在錯(cuò)綜復(fù)雜的城市環(huán)境中。
與此同時(shí),公司亦宣布旗下Robotaxi將與著名激光雷達(dá)廠商Luminar合作,通過(guò)激光雷達(dá)、雷達(dá)與攝像頭的配置綜合提升其無(wú)人駕駛的感知精確程度,提高車(chē)輛行駛安全性與可靠性。可見(jiàn)激光雷達(dá)與視覺(jué)攝像頭在現(xiàn)階段還沒(méi)有完全分出高下,多傳感器冗余在目前來(lái)說(shuō)是各家廠商比較保守的發(fā)展路線。?
激光雷達(dá)價(jià)格不斷下探,純視覺(jué)派還要堅(jiān)持多久?
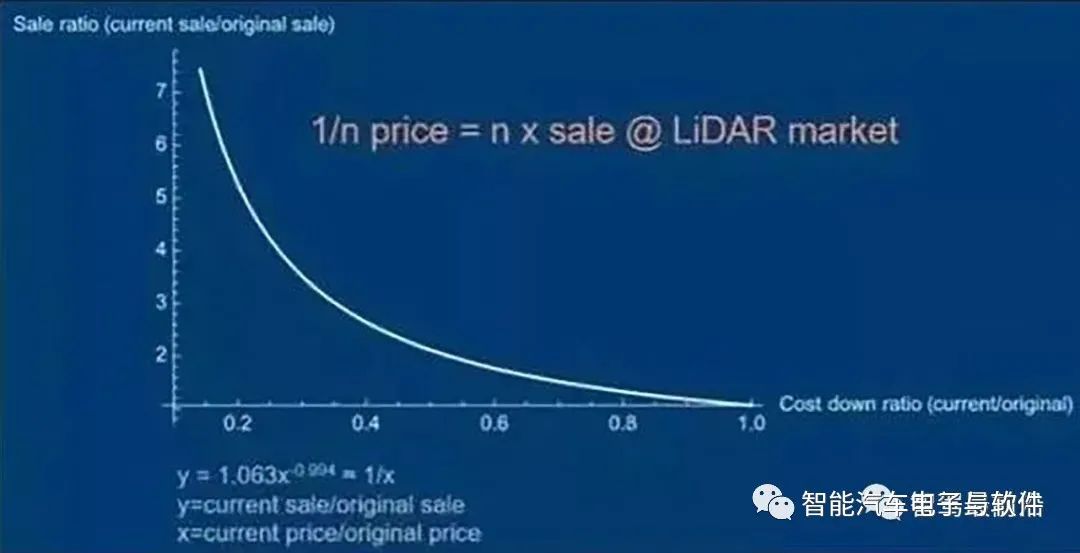
曾經(jīng)激光雷達(dá)的成本是非常高的,一套激光雷達(dá)設(shè)備一度最高能達(dá)到7.5萬(wàn)美金,讓以馬斯克為代表的純視覺(jué)派萬(wàn)萬(wàn)沒(méi)想到的是,激光雷達(dá)的成本比想象中降得更快。
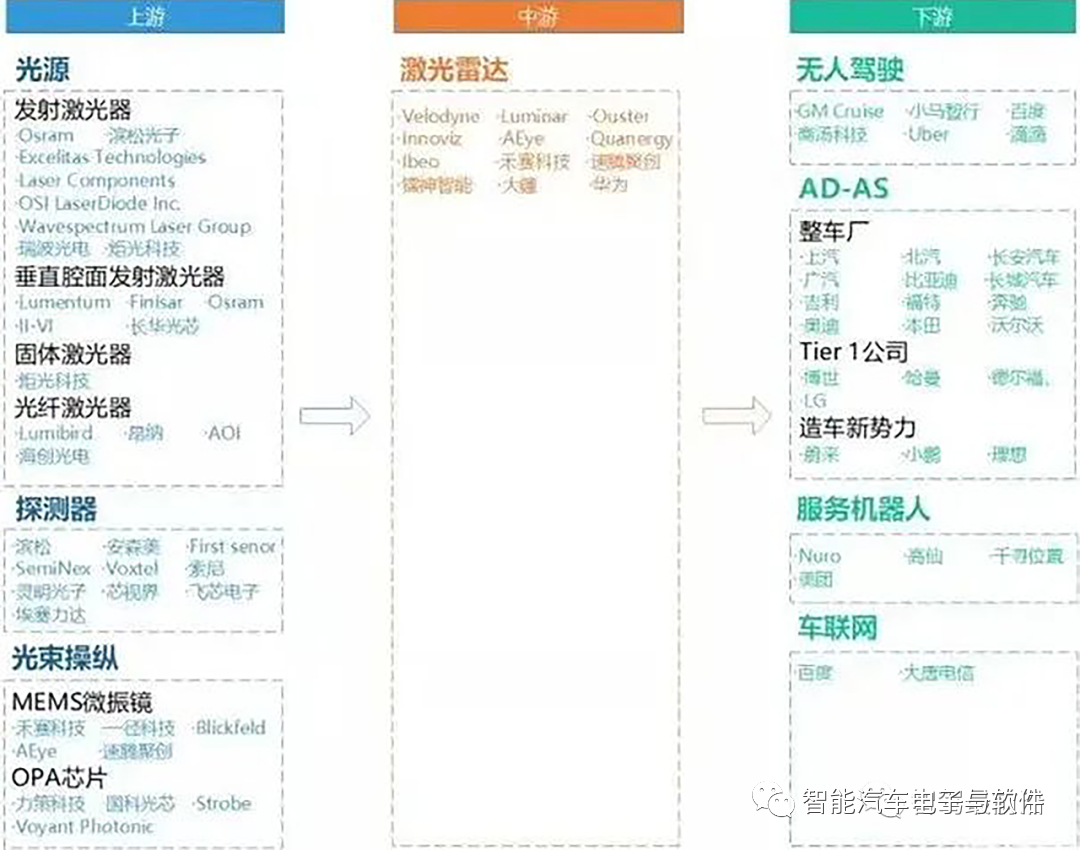
近年來(lái),隨著激光雷達(dá)從機(jī)械式向固態(tài)式發(fā)展的趨勢(shì),激光雷達(dá)實(shí)現(xiàn)了快速的成本降低。其中OPA式的固態(tài)激光雷達(dá)在量產(chǎn)后有希望降到200美元以下。激光雷達(dá)成本的迅速下降更得益于中國(guó)相關(guān)產(chǎn)業(yè)鏈的成熟與完善,將成本迅速降低。特別是中游激光雷達(dá)已經(jīng)有不少?lài)?guó)產(chǎn)廠商如禾賽科技、大疆、華為、速騰聚創(chuàng)、鐳神智能等。
激光雷達(dá)成本下降非常關(guān)鍵
之所以目前大部分車(chē)廠采用激光雷達(dá)方案,一個(gè)重要原因是此方案能夠?qū)崿F(xiàn)較快落地,并可通過(guò)多傳感器配合實(shí)現(xiàn)安全冗余。尤其在短期內(nèi),純視覺(jué)方案基于深度學(xué)習(xí)的算法尚未達(dá)到全路況覆蓋情況下、安全性仍存疑,激光雷達(dá)方案安全性更高。而我們回顧馬斯克以往的所有有別于常人的舉動(dòng),無(wú)論是SpaceX回收火箭,還是采用消費(fèi)級(jí)元器件,又或是只用攝像頭,其本質(zhì)都是一點(diǎn):降成本。另外,純視覺(jué)方案需要車(chē)廠掌握海量用戶數(shù)據(jù)、并自己建立軟件開(kāi)發(fā)部門(mén),算法開(kāi)發(fā)難度極高,最早押寶的特斯拉可以擁有領(lǐng)先優(yōu)勢(shì),形成技術(shù)壁壘。如果競(jìng)爭(zhēng)對(duì)手都用純視覺(jué)方案,那么只能一直跟在特斯拉的屁股后面追趕。只是,馬斯克唯一沒(méi)有預(yù)料到的就是激光雷達(dá)的成本降得這么快,而競(jìng)爭(zhēng)對(duì)手的量產(chǎn)車(chē)這么快就上市了。
馬斯克曾經(jīng)詳細(xì)解釋過(guò)他對(duì)雷達(dá)和攝像頭的看法:在雷達(dá)波長(zhǎng)下,現(xiàn)實(shí)世界看起來(lái)像一個(gè)奇怪的幽靈世界。除了金屬,幾乎所有東西都是半透明的。當(dāng)雷達(dá)和視覺(jué)感知不一致時(shí),你采信哪一個(gè)?視覺(jué)具有更高的精度,因此投入兩倍的精力改善視覺(jué)比押注兩種傳感器的融合更明智。傳感器的本質(zhì)是比特流。攝像頭比特/秒的信息量要比雷達(dá)和激光雷達(dá)高幾個(gè)數(shù)量級(jí)。雷達(dá)必須有意義地增加比特流的信號(hào)/噪聲,以使其值得集成。隨著視覺(jué)處理能力的提高,攝像頭的性能將會(huì)遠(yuǎn)遠(yuǎn)甩開(kāi)當(dāng)下的雷達(dá)。因此,當(dāng)視覺(jué)與雷達(dá)不一致時(shí),馬斯克認(rèn)為應(yīng)該相信攝像頭。但馬斯克聰明的是他也為自己留了后路,2021年1月1日前后,國(guó)外網(wǎng)友在硅谷拍到了一些不太多見(jiàn)的特斯拉車(chē)型,有Model S,有Model Y,也有Model X。均搭載了360度?覆蓋的激光雷達(dá)感知系統(tǒng)。據(jù)一位前特斯拉工程師的說(shuō)法,特斯拉采購(gòu)Luminar的激光雷達(dá)由來(lái)已久,在攝像頭做深度感知的時(shí)候,特斯拉會(huì)用激光雷達(dá)輸出的點(diǎn)云數(shù)據(jù)做人工標(biāo)注進(jìn)行比對(duì)。
盡管馬斯克多次表態(tài),特斯拉從技術(shù)路徑層面,不會(huì)搭載激光雷達(dá)。但行業(yè)里一直有一種相當(dāng)高聲量的意見(jiàn)認(rèn)為,特斯拉不用激光雷達(dá),無(wú)非是成本沒(méi)有達(dá)到商業(yè)化的臨界點(diǎn)。我們或許不用太把馬斯克說(shuō)過(guò)的話放在心上,畢竟他除了“鋼鐵俠、火星人”的標(biāo)簽之外,更多是一個(gè)成功的商人和營(yíng)銷(xiāo)大師。?
寫(xiě)在最后
說(shuō)一千道一萬(wàn),汽車(chē)駕駛,安全可靠才是一切技術(shù)的前提,從現(xiàn)今的技術(shù)水平來(lái)說(shuō),采用安全冗余的傳感器方案,不失為一種更為靠譜的方法,也能更能讓用戶安心、放心。不管是純視覺(jué)方案還是雷達(dá)的方案,其實(shí)都各有優(yōu)劣,很難用一種傳感器打遍天下。因此業(yè)界的普遍思路是:在一輛能夠?qū)崿F(xiàn)L2及以上功能的車(chē)上需要搭載多種傳感器,進(jìn)行大量的冗余設(shè)計(jì),才能確保產(chǎn)品的安全可靠。目前公認(rèn)的是,智能駕駛等級(jí)越高搭載傳感器越多。
根據(jù)車(chē)型配置信息的相關(guān)統(tǒng)計(jì),智能駕駛在L2需要9-19個(gè)傳感器,包括超聲波雷達(dá)、長(zhǎng)距離及短距離雷達(dá)和環(huán)視攝像頭,發(fā)展到L3預(yù)計(jì)需要搭載19-27個(gè),可能需要激光雷達(dá)、高精度導(dǎo)航定位等。在目前在售的新勢(shì)力汽車(chē)產(chǎn)品中,均配備了大量攝像頭、毫米波雷達(dá)、超聲波雷達(dá)等傳感器。因此,對(duì)于這兩大派系來(lái)說(shuō)也許未來(lái)真的會(huì)在頂峰相見(jiàn),也沒(méi)準(zhǔn)會(huì)一直長(zhǎng)期共存下去,畢竟安全是自動(dòng)駕駛發(fā)展的基石與底線,在保證安全的情況下,各種技術(shù)路線之間的交融與淘汰都會(huì)讓安全這件事的概率更接近100%,所以我們期待著視覺(jué)算法能進(jìn)一步突破,變的更貼近人眼的水平;激光雷達(dá)產(chǎn)業(yè)更加蓬勃發(fā)展,讓價(jià)格不斷下探,更能符合前裝量產(chǎn)的要求,讓我們共同見(jiàn)證各家技術(shù)一起進(jìn)步為自動(dòng)駕駛的終極目標(biāo)添磚加瓦吧。
編輯:黃飛
?


















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論