 電子發燒友App
電子發燒友App


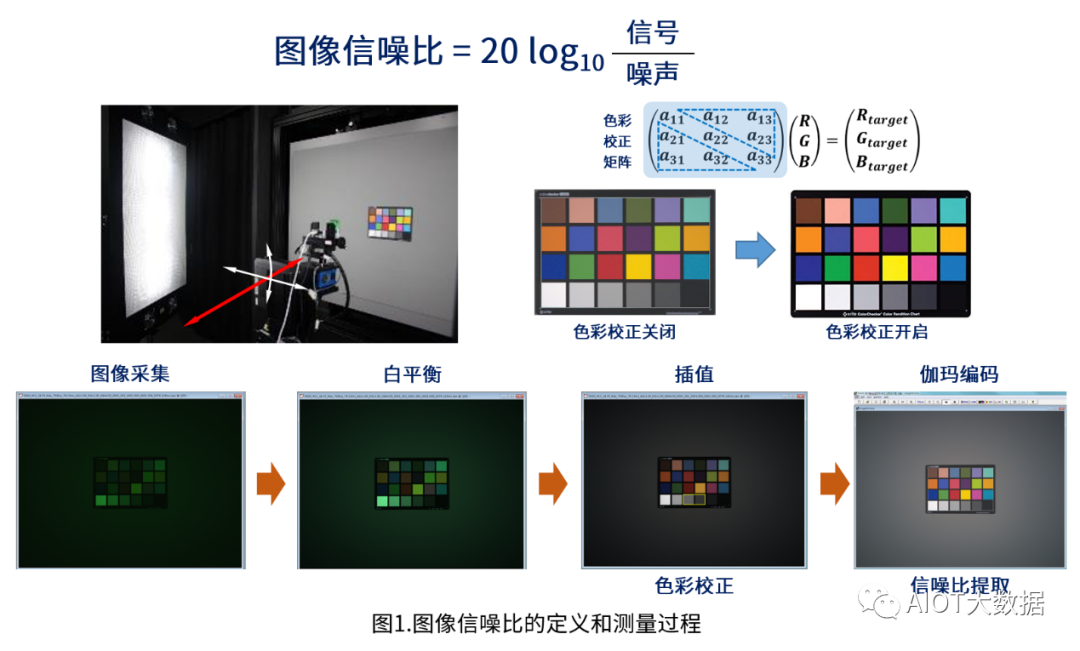
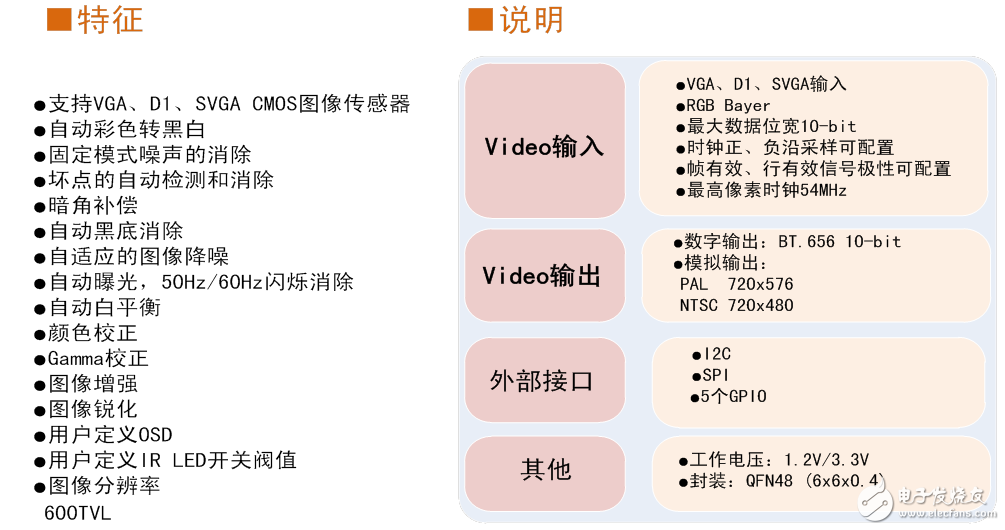
CIS圖像質量與像素(Pixel) 我們今天使用的大多數移動設備,如手機、平板電腦和筆記本電腦等,都至少裝有一個或多個攝像頭傳感器。我們在這些設備上拍攝的圖像的質量好壞是由傳感器中一種名為“像素”的電子機制決定的,而傳感器是將光信號轉換成電信號的關鍵部件。 在眾多的圖像質量指標中,最具代表性的是被稱為“圖像信噪比(Signal-to-NoiseRatio,簡稱SNR)”的定義和測量過程(圖1)。為了獲得較高的圖像信噪比,我們需要增加信號項和降低噪聲項,而這些項主要取決于滿阱容量、靈敏度、像素暗噪聲、讀出電路噪聲和像素串擾等像素性能指標。 在明亮條件下,滿阱容量和像素串擾是影響圖像信噪比的主要因素;而在黑暗條件下,靈敏度、像素暗噪聲、讀出電路噪聲和像素串擾則是影響圖像信噪比的主要因素。因此,從技術角度來看,在黑暗條件下獲得較為理想的圖像信噪比,即更佳的圖像質量,就更為困難,這是因為我們需要控制并改進許多像素的性能指標。
? ? ? ? ?
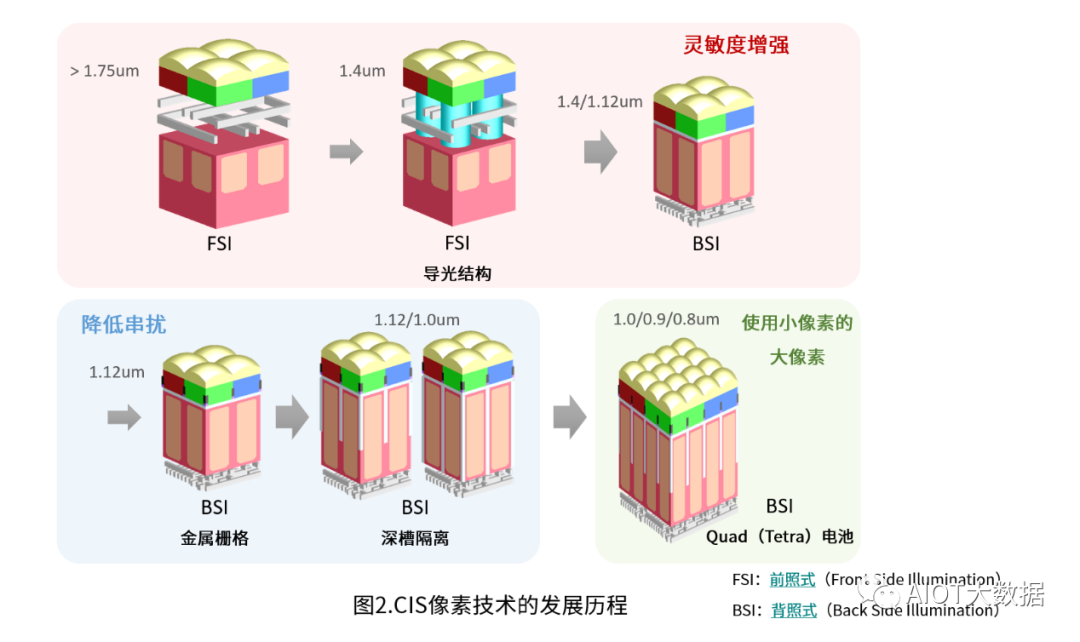
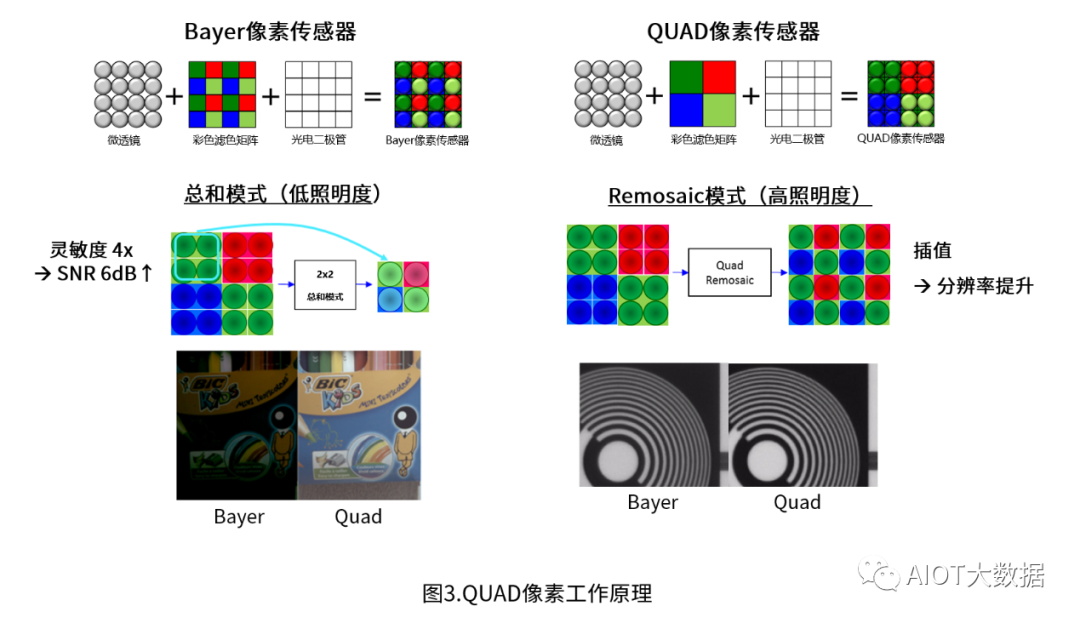
CIS像素發展歷程 在過去的十年里,人們對更高分辨率傳感器的需求不斷提高,同時也不斷致力于開發出更小的像素。圖2展示了CIS像素技術的發展歷程,從中我們可以看到像素大小縮放的技術壁壘是如何被攻克的。像素縮小技術的創新分為三個階段:(1)靈敏度(Sensitivity);(2)串擾(Crosstalk);和(3)QUAD(或TETRA)像素技術。 在第一階段,像素工程師們致力于彌補因像素尺寸減小而導致的靈敏度受損,由此研發出包括片上透鏡(或微透鏡)、更厚的硅光電二級管和背照式等在內的許多創新技術。。在第二階段,即像素尺寸達到1微米左右時,像素工程師們更多地將注意力放在減少串擾上。在此期間,為了抑制光電串擾,研究人員研發出了彩色濾光片層金屬柵極結構和硅光電二極管深槽隔離工藝等新技術。 隨著像素尺寸不斷縮小到亞微米范圍,研究人員針對小像素在弱光照環境下的敏感度問題,提出了一種全新的、基于QUAD或TETRA像素結構的像素工作模式概念。QUAD像素的基本工作原理如圖3所示。預計在未來,所有亞微米尺寸像素也將采用這種QUAD像素方案。
? ? ? ? ?
互補金屬氧化物半導體(CMOS)圖像傳感器的結構圖 高分辨率固態成像設備(主要是電荷耦合器件(CCD)和互補金屬氧化物半導體(CMOS)圖像傳感器)的到來,預示了光學顯微鏡的新時代,該時代可能會超越膠片等傳統圖像記錄技術,視頻管和光電倍增管。許多原始設備和售后市場制造商都提供了專門為顯微鏡應用而設計的電荷耦合設備相機系統,而CMOS成像傳感器現在已可用于少數顯微鏡。
? ? 兩種技術都是在1970年代初和后期之間開發,但是CMOS傳感器的性能令人無法接受,直到1990年代初,人們普遍忽略或認為它們只是出于好奇。到那時,CMOS設計的進步是生產出了像素尺寸更小,噪點更低,圖像處理算法更強大以及成像陣列更大的芯片。CMOS傳感器的主要優點之一是低功耗,主時鐘和單電壓電源,而CCD經常需要以不同的時鐘速度提供5個或更多電源電壓,而功耗卻要高得多。CMOS和CCD芯片都利用光電技術通過相似的機制感應光當光子與結晶的硅相互作用以促進電子從價帶進入導帶時,就會發生這種效應。注意,術語“CMOS”是指制造圖像傳感器的過程,而不是指特定的成像技術。 當可見光的寬波段入射到特殊摻雜的硅半導體材料上時,與入射在光電二極管表面的光子通量密度成比例地釋放出可變數量的電子。實際上,產生的電子數量是入射到半導體的光的波長和強度的函數。電子被收集在勢阱中,直到積分(照明)周期結束,然后將其轉換為電壓(CMOS處理器)或轉移到計量寄存器(CCD傳感器)。
然后將測得的電壓或電荷(轉換為電壓后)通過模數轉換器,該轉換器形成傳感器成像的場景的數字電子表示。 光電二極管(通常稱為像素)是數字圖像傳感器的關鍵元素。靈敏度由光電二極管可以累積的最大電荷,入射光子到電子的轉換效率以及器件在受限區域內累積電荷而不會泄漏或溢出的能力所決定。這些因素通常由光電二極管的物理尺寸和孔徑及其與陣列中相鄰元素的空間和電子關系確定。另一個重要因素是電荷電壓轉換比,它決定了積分的電子電荷如何有效地轉換為可以測量和處理的電壓信號。光電二極管通常以正交網格的形式組織,其大小范圍從128×128像素(16K像素)到更常見的1280×1024(超過一百萬像素)。幾種最新的CMOS圖像傳感器,例如為高清電視(HDTV)包含數百萬個像素,這些像素被組織成超過2000平方像素的超大型陣列。
必須準確地檢測和測量(讀出)組成陣列的每一行和每一列的所有像素的信號,以便根據光電二極管電荷累積數據來組裝圖像。 在光學顯微鏡中,由物鏡聚集的光通過投影透鏡聚焦到傳感器表面,該傳感器表面包含相同光電二極管的二維陣列,稱為圖像元素或像素。因此,陣列尺寸和像素尺寸確定傳感器的空間分辨率。CMOS和CCD集成電路本質上是單色(黑白)器件,僅響應光電二極管中累積的電子總數,而不響應光的顏色,從而導致其從硅基板中釋放出來。通過使入射光通過一系列連續的紅色,綠色和藍色濾光片,或使用以馬賽克圖案沉積在像素陣列上方的微型透明聚合薄膜濾光片,可以檢測顏色。? ? ? ? ? ? ?
CMOS光電二極管的解剖結構 CMOS圖像傳感器比CCD圖像傳感器具有的主要優勢是能夠將許多處理和控制功能直接集成到傳感器集成電路上,而這些功能超出了光子收集的主要任務。這些功能通常包括定時邏輯,曝光控制,模數轉換,快門,白平衡,增益調整和初始圖像處理算法。為了執行所有這些功能,CMOS集成電路架構更類似于隨機存取存儲單元,而不是簡單的光電二極管陣列。
最受歡迎的CMOS設計圍繞有源像素傳感器(APS)構建)技術,其中光電二極管和讀出放大器都集成到每個像素中。這使得由光電二極管積累的電荷能夠轉換為像素內部的放大電壓,然后按順序的行和列傳輸到芯片的模擬信號處理部分。 因此,除了光電二極管之外,每個像素(或成像元件)還包含三合一晶體管,其將累積的電子電荷轉換為可測量的電壓,復位光電二極管,并將該電壓傳輸到垂直列總線。所得的陣列是金屬讀出總線的有組織的棋盤格,在每個交叉點處都包含一個光電二極管和相關的信號準備電路。總線將定時信號施加到光電二極管,并將讀出的信息返回到遠離光電二極管陣列的模擬解碼和處理電路。這種設計使陣列中每個像素的信號都可以通過簡單的x,y尋址技術讀取,而這是當前CCD技術無法實現的。? ?
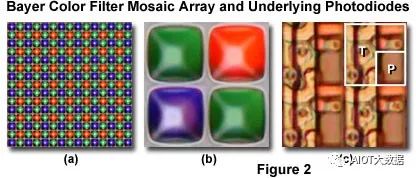
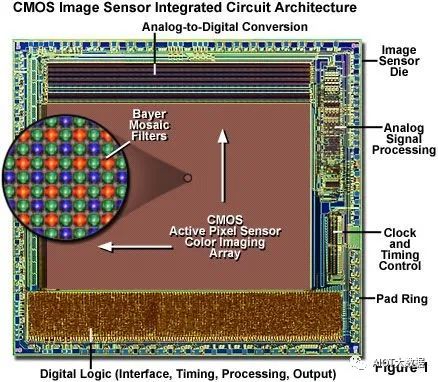
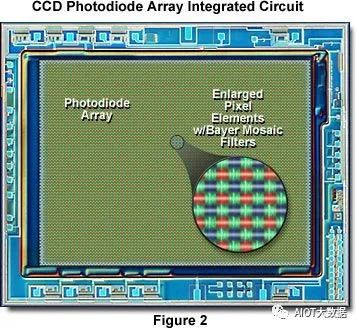
圖1給出了一個典型的CMOS圖像傳感器的體系結構,該集成電路芯片包含一個640×480像素的有效圖像區域。光電二極管陣列位于芯片的大紅棕色中心區域,上面覆蓋有序的紅色,綠色和藍色染料聚合物濾光片薄層,每個濾光片的大小適合于單個光電二極管(類似于用于彩色CCD的技術)。為了將入射的光子集中到光電二極管電子收集井中,已過濾的光電二極管也被裝在稱為微透鏡或雙凸透鏡陣列的微型正彎月形透鏡(參見圖2、3和4)下方。圖1中的插圖顯示了濾光鏡和微透鏡陣列的高倍放大視圖。模擬信號處理電路還包括在圖1所示的集成電路中,該電路收集并解釋由光電二極管陣列產生的信號。然后將這些信號發送到位于芯片上部光電二極管陣列附近的模數轉換電路(如圖1所示)。
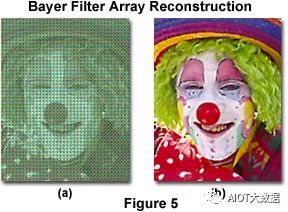
CMOS圖像傳感器執行的其他任務包括用于逐步電荷產生,電壓收集,傳輸和測量任務的時鐘時序,以及圖像處理和累積信號的輸出。 仔細觀察光電二極管陣列,可以發現以柯達工程師BryceE.Bayer的名字命名的馬賽克圖案排列的紅色,綠色和藍色濾光片的順序圖案。此濾色鏡陣列(拜耳設計用于從來自光學透鏡系統的寬帶入射照明中捕獲顏色信息。濾光片按四行排列(圖2(a)和圖2(b)),并按連續的行順序排列,交替使用紅色和綠色或藍色和綠色濾光片(圖2(a))。圖2中顯示的是由典型拜耳濾光片陣列的高分辨率光學顯微鏡和下面的光電二極管捕獲的數字圖像。圖2(a)示出了交替的過濾器行的視圖。
每個紅色濾鏡被四個綠色和四個藍色濾鏡包圍,而每個藍色濾鏡被四個紅色和四個綠色濾鏡包圍。相反,每個綠色濾鏡被兩個紅色,四個綠色和兩個藍色濾鏡包圍。基本重復單元的高倍放大圖像如圖2(b)所示,并包含一個紅色,一個藍色和兩個綠色濾鏡,使數組中綠色濾鏡的總數等于紅色和藍色濾鏡組合的數量。綠色濾光片的重點在于人的視覺響應,它在可見光譜的550納米(綠色)波長范圍內達到了最高靈敏度。
? ? 在圖2(b)中還顯示了微透鏡陣列(也稱為小透鏡)的一小部分,這些微透鏡通過光刻法沉積在拜耳濾鏡的表面上并對齊,以使每個透鏡都覆蓋一個單獨的濾鏡。微型透鏡元件的形狀接近凸彎月透鏡的形狀,并用于將入射光直接聚焦到光電二極管的光敏區域中。在拜耳濾光片和微透鏡陣列下面是光電二極管本身,它們在圖2(c)中顯示為四個完整的光電二極管組件或像素單元。圖2(c)中的一個光電二極管用一個大白框(右上角)標識,該白框在較大的網格內還包含一個較小的矩形框。白框用字母P標識和T分別指像素的光子收集(光敏)和支撐晶體管區域。
從檢查圖2(c)中的光電二極管元件可以明顯看出,大部分像素(在此示例中約為70%)區域專用于對晶體管相對不透明的支持晶體管(放大器,復位和行選擇)。可見光光子,不能用于光子檢測。剩余的30%(在圖2(c)中標記為P的較小的白框)表示像素的感光部分。由于光電二極管的一小部分實際上能夠吸收光子以產生電荷,因此填充系數或孔徑圖1、2和3所示的CMOS芯片和光電二極管的像素數僅占光電二極管陣列總表面積的30%。
結果是靈敏度顯著降低,信噪比相應降低,從而導致動態范圍有限。填充因數比因設備而異,但通常,它們在CMOS傳感器中占像素面積的30%至80%。 使減少的填充因子問題更為復雜的是光子吸收的波長相關性質,該術語適當地稱為CMOS和CCD圖像傳感器的量子效率。三種主要機制可阻止光敏區域收集光子:吸收,反射和透射。如上所述,光電二極管面積的百分之七十以上可以被晶體管和堆疊或交錯的金屬總線屏蔽,它們是光學不透明的,吸收或反射與結構碰撞的大部分入射光子。這些堆疊的金屬層還可能導致不良影響,例如漸暈,像素串擾,光散射和衍射。? ?
入射光子的反射和透射是波長的函數,雖然大部分(在某些情況下)這些損耗可以很好地擴展到可見光譜區域,但大部分被反射的較短波長(小于400納米)被反射。許多CMOS傳感器在制造過程中都涂有黃色的聚酰亞胺涂層,在這些光子到達光電二極管區域之前,它吸收了很大一部分藍色光譜。減少或最小化多晶硅和聚酰亞胺(或聚酰胺)層的使用是優化這些圖像傳感器的量子效率的主要考慮因素。
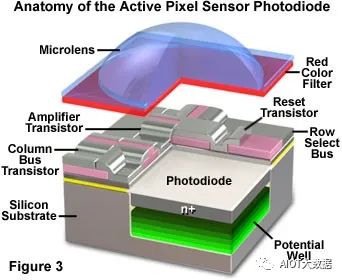
較短的波長在光敏區域的前幾微米處被吸收,但是逐漸變長的波長在被完全吸收之前會鉆到更大的深度。此外,最長的可見波長(超過650納米)通常會穿過光敏區域而沒有被捕獲(或產生電子電荷),從而導致了另一個光子損失源。盡管微透鏡陣列的應用有助于將入射的光子聚焦并引導到光敏區域中,并且可以使光電二極管的靈敏度提高一倍,但是這些微小的元件還顯示出基于波長和入射角的選擇性。 圖3中顯示的是典型CMOS有源傳感器像素的三維剖視圖,顯示了感光區域(光電二極管),總線,微透鏡,拜耳濾波器和三個支持晶體管。
如上所述,CMOS圖像傳感器中的每個APS元件都包含一個放大器晶體管,該晶體管代表通常稱為源極跟隨器的輸入設備。(源跟隨器的負載在像素外部,并且在列中的所有像素共有)。源極跟隨器是一個簡單的放大器,它將光電二極管產生的電子(電荷)轉換為輸出到列總線的電壓。此外,該像素還具有一個復位晶體管來控制積分或光子累積時間,以及一個將像素輸出連接到列總線以進行讀出的行選擇晶體管。特定列中的所有像素都連接到讀出放大器。?
? 在操作中,圖像捕獲的第一步是初始化復位晶體管,以便從光敏區中排出電荷并反向偏置光電二極管。接下來,積分期開始,與像素的光電二極管區域相互作用的光產生電子,這些電子被存儲在位于表面下方的硅勢阱中(見圖3)。當積分周期結束時,行選擇晶體管導通,將所選像素中的放大器晶體管連接到其負載,以形成源極跟隨器。
因此,通過源極跟隨器操作將光電二極管中的電子電荷轉換為電壓。所產生的電壓出現在列總線上,并且可以由讀出放大器檢測到。 三像素APS設計的主要缺點之一是相對較高水平的偽影,稱為固定圖案噪點(FPN)。放大器晶體管增益和偏移的變化是制造過程中CMOS技術工藝波動的根本問題,會導致整個陣列的晶體管輸出性能不匹配。結果是在捕獲的圖像中明顯可見的噪點模式是恒定的,并且可以從一個圖像復制到另一個圖像。在大多數情況下,可以通過對位于陣列外圍的模擬信號處理電路進行設計調整或通過對暗圖像進行電子減法(平場校正)來顯著降低或消除固定模式的噪點。
馬賽克濾鏡陣列和圖像重建 ? ? 具有兩倍于藍色或紅色的綠色濾光器的拜耳濾光器馬賽克陣列的不平衡性質似乎也將出現關于單個像素的精確色彩再現的問題。拜耳濾光片的構造中使用的常見染料的典型透射光譜圖如圖4所示。紅色濾光片的量子效率顯著大于綠色和藍色濾光片的量子效率,綠色和藍色濾光片的整體效率彼此接近。請注意,濾鏡之間的光譜重疊程度相對較高,尤其是在520至620納米(綠色,黃色和橙色)區域。
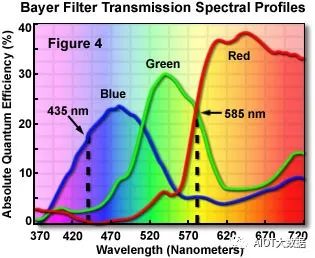
關于將像素劃分為拜耳濾光器圖案的基本元素的光電二極管陣列的顏色再現和空間分辨率的確切性質,經常會產生疑問。像素尺寸為640×480像素的光電二極管陣列總共包含307,200像素,產生76,800拜耳四重奏。這是否意味著實際有用的圖像空間分辨率降低到320×240像素?幸運的是,空間分辨率主要由彩色圖像的亮度分量而不是色度(彩色)分量決定。發生這種情況是因為人腦可以將相當粗略的顏色信息添加到精細的空間信息中,并且幾乎無縫地將兩者整合在一起。此外,拜耳濾光片具有較寬的波長傳輸帶(參見圖4),并具有較大的重疊區域, 例如,假設有一個物體將大量的黃光(以585納米為中心)反射到CMOS數碼相機的鏡頭系統中。
通過檢查圖4中的Bayer濾光片透射光譜,很明顯,紅色和綠色濾光片在該波長范圍內透射相同量的光。另外,藍色濾光片還透射大約20%的波長穿過其他濾光片。因此,每個四重奏中的四個Bayer濾鏡中有三個通過了相等數量的黃光,而第四個(藍)濾鏡也透射了其中的一些光。相比之下,較低波長的藍光(435納米;見圖4)僅以任何顯著程度通過藍色濾光片, ? ? 從由拜耳圖案的彩色濾光片覆蓋的CMOS光電二極管陣列獲得原始圖像后,必須通過插值方法將其轉換為標準的紅色,綠色和藍色(RGB)格式。
為了產生準確表示由電子傳感器成像的場景的圖像,此重要步驟是必需的。可以使用多種復雜且完善的圖像處理算法(在圖像捕獲后直接在集成電路上)執行此任務,包括最近的鄰居,線性,三次和三次樣條技術。為了確定陣列中每個像素的正確顏色,算法對選定的相鄰像素的顏色值進行平均,并對陣列中每個像素的顏色(色度)和強度(發光度)進行估算。圖5(a)中顯示的是通過插值重建之前的原始拜耳圖案圖像,圖5(b)中顯示的是經過線性插值算法的相關調整后的處理結果。
作為顏色插值功能的示例,請考慮嵌套在Bayer濾鏡陣列中心區域的綠色像素之一。該像素被兩個藍色,兩個紅色和四個綠色像素包圍,它們是其最接近的鄰居。插值算法通過檢查相鄰紅色和藍色像素的色度和亮度值來生成綠色像素的紅色和藍色值的估計值。對陣列中的每個像素重復相同的過程。
如果圖像顏色在大量像素上緩慢變化,但是在出現較大顏色和/或強度過渡的邊緣和邊界區域,圖像顏色也會緩慢變化,但也會遭受偽影(例如混疊)的影響,因此該技術會產生出色的效果。 為了提高量子效率和光譜響應,一些CMOS設計人員轉向使用基于主減色的濾色器陣列:青色,黃色和品紅色(CMY),而不是標準的加成原色紅色,綠色和藍色(RGB)。使用CMY濾光片陣列的優點之一是靈敏度提高,從而改善了通過濾光片的光透射率,并增強了信號強度。發生這種情況是因為與相應的添加劑濾光片相比,減色濾光片染料在可見光區域的光波吸收降低。與紅色,綠色和藍色濾光片(兩層或更多層的復合材料會產生附加吸收)相反,CMY濾光片應用于具有優異透光特性的單層中。CMY濾鏡的缺點是將從傳感器收集的CMY數據轉換為RGB值所需的更復雜的色彩校正矩陣,以便在計算機監視器上打印或顯示圖像。? ? ? ? ? ? ?
噪點的來源和補救措施 CMOS圖像傳感器的一個主要問題是,在檢查由這些設備產生的圖像時,很容易發現明顯的高噪點。傳感器技術的進步已使信號處理電路與圖像陣列緊密集成在一起,從而大大抑制了許多噪點源并大大提高了CMOS性能。但是,其他類型的噪點通常困擾設計師和最終用戶。如上所述,現代CMOS采集后信號處理技術實際上已消除了固定模式噪點,但是其他形式(例如光子散粒噪點,暗電流,復位噪點和熱噪點)卻不那么容易處理。
在通過復位晶體管對光電二極管進行初始化或復位的過程中,會產生稱為kTC(或復位)噪點的大噪點分量,如果不增強電路設計就很難將其消除。縮寫k是玻爾茲曼常數,T是工作溫度,C是出現在放大晶體管輸入節點的總電容,由光電二極管電容和放大晶體管輸入電容之和組成。重置噪點會嚴重限制圖像傳感器的信噪比。復位和另一個噪點源,通常稱為放大器或1/f低頻噪點可以通過稱為相關雙采樣(CDS)的技術進行控制,該技術必須通過向每個像素添加第四個“測量”(或傳輸)晶體管來實現。
雙采樣算法通過單獨測量復位或放大器噪點,然后減去組合的圖像信號加上復位噪點來起作用。 光子散粒噪點在捕獲的圖像中很容易以隨機模式出現,這是由于照明量的統計波動導致輸出信號隨時間變化而出現的。陣列中的每個光電二極管產生的光子散粒噪點略有不同,這在極端情況下會嚴重影響CMOS圖像傳感器的性能。對于比傳感器的固有本底噪點大得多的信號,這種類型的噪點是主要的噪點源,并且出現在每個圖像傳感器(包括CCD)中。暗電流是由偽影產生的,這些偽影在沒有照明的情況下會產生信號電荷(電子),并且在像素之間會表現出很大程度的波動,這在很大程度上取決于工作條件。這種類型的噪點對溫度敏感, ? ? 幾乎不可能消除暗電流,但可以通過在CMOS傳感器制造過程中利用固定光電二極管技術來減少暗電流。為了產生釘扎的光電二極管像素,將P型硅的淺層施加到典型的N阱光敏區域的表面上,以產生改變像素的可見光譜響應的雙結三明治。對表面結進行了優化,以響應較低的波長(藍色),而深度較深的結對較長的波長(紅色和紅外)更敏感。
結果,收集在勢阱中的電子被限制在N附近遠離表面的區域,導致暗電流及其相關噪點元素的減少。在實踐中,可能很難構造一個固定的光電二極管像素,該像素在CMOS傳感器工作的低壓環境下會產生完全復位。如果沒有達到完全的復位條件,則滯后會被引入到陣列中,并相應增加復位晶體管的噪點。固定光電二極管技術的其他好處是,由于增強了對P硅層界面附近的短波可見光輻射的捕獲,因此改善了藍光響應。 像素的感光區域之間糾纏的晶體管,電容器和總線負責在CMOS圖像傳感器中產生熱噪點。可以通過微調成像器帶寬,增加輸出電流或冷卻攝像頭系統來減少此類噪點。在許多情況下,可以通過限制每個晶體管放大器的帶寬來利用CMOS像素讀出序列來減少熱噪點。向低成本CMOS圖像傳感器中添加復雜且昂貴的Peltier或類似的冷卻設備是不切實際的,因此通常不采用這些設備來降低噪點。 ? ? ? ? ?
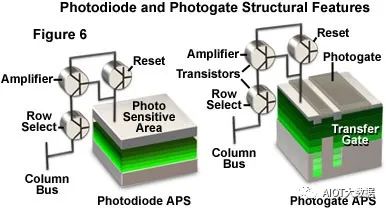
CMOS像素架構 有在現代CMOS圖像傳感器利用了兩個基本光敏像素元件架構:光電二極管和photogates(參見圖6)。通常,光電二極管設計對可見光更敏感,尤其是在光譜的短波長(藍色)區域。光電門器件通常具有較大的像素面積,但比光電二極管具有更低的填充系數和更差的藍光響應(以及一般的量子效率)。但是,光電門通常會達到更高的電荷電壓轉換增益水平,并且可以輕松地用于執行相關的兩次采樣以實現幀差異。? ?
光電門有源像素傳感器利用CCD技術的多個方面來減少噪點并提高用CMOS圖像傳感器捕獲的圖像的質量。積分期間在光電門下方積累的電荷被定位到由訪問晶體管很好控制的電位。在讀出期間,支持像素電路執行電荷(作為電壓)到輸出總線的兩階段轉移。第一步是通過放大器晶體管將累積的電荷轉換為可測量的電壓而發生的。接下來,傳輸門被脈沖化以啟動電荷從光敏區域到輸出晶體管的傳輸,然后被傳遞到列總線。這種傳輸技術提供了兩個信號采樣機會,可以通過有效的設計來利用它們來改善降噪效果。像素輸出首先在光電二極管復位后采樣,然后在積分信號電荷后再次采樣。
通過從第二個信號中減去第一個信號以消除低頻復位噪點,光電門有源像素架構可以執行相關的雙采樣。 與光電二極管傳感器相比,光電門設計的主要優點是在低光照條件下降低了噪點特性。基于光電二極管的CMOS傳感器可用于中等性能的消費類應用,這些應用不需要具有低噪點,出色的動態范圍和高度分辨的色彩特性的高精度圖像。兩種設備均利用經濟的電源要求,這些要求可通過電池,計算機接口(USB和FireWire)的低壓電源或其他直流電源來滿足。通常,CMOS處理器的電壓要求范圍為3.3伏至5.0伏,但是較新的設計正在遷移至降低一半的值。 ? ? ? ? ?
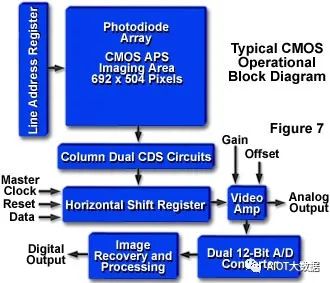
CMOS圖像傳感器操作順序 ? ? 在大多數CMOS光電二極管陣列設計中,有源像素區域被以8至12行和列排列的光屏蔽像素區域包圍,這些像素用于黑電平補償。拜耳(或CMY)濾波器陣列從第一個非屏蔽行和列中的左上像素開始。當每個積分周期開始時,板上定時和控制電路將重置同一行中的所有像素,一次一行,從行地址寄存器分類的第一行到最后一行遍歷(參見圖1)。7)。對于具有模擬輸出的傳感器設備,積分完成后,相同的控制電路會將每個像素的積分值傳輸到相關的雙采樣電路(CDS圖7中的模塊),然后再到水平移位寄存器。移位寄存器加載后,像素信息將被串行移位(一次一個像素)到模擬視頻放大器。
該放大器的增益由硬件或軟件(在某些情況下是兩者的組合)控制。相比之下,具有數字讀出功能的CMOS圖像傳感器對每一列都使用模數轉換器,并且對一行中的每個像素并行進行轉換。然后采用寬度等于完成轉換的位數的數字總線來輸出數據。在這種情況下,僅數字值“串行”移位。白平衡算法通常在此階段應用于像素。 在視頻放大器中設置了增益和偏移值(圖7中標記為VideoAmp)之后,像素信息隨后被傳遞到模數轉換器,在此它被轉換為二進制的線性數字陣列。
隨后,對數字像素數據進行進一步處理,以消除出現在“壞”像素中的缺陷,并在將其成幀并呈現在數字輸出端口上之前補償黑電平。黑色電平補償算法(通常稱為幀率鉗位)從數字視頻輸出中減去陣列周圍黑色像素的平均信號電平,以補償有源像素陣列中與溫度和時間相關的暗噪點電平。
該序列的下一步是圖像恢復(參見圖7),以及應用必要的基本算法來準備最終圖像以進行顯示編碼。對像素執行最近鄰居插值,然后使用抗鋸齒算法對其進行濾波并縮放。恢復引擎中的其他圖像處理步驟通常包括反漸暈,空間失真校正,黑白平衡,平滑,銳化,顏色平衡,光圈校正和伽瑪調整。在某些情況下,CMOS圖像傳感器配備有輔助電路,這些輔助電路可實現片上功能,例如抗抖動(圖像穩定)和圖像壓縮。圖像經過充分處理后,將被發送到數字信號處理器以緩沖到輸出端口。? ?
因為CMOS圖像傳感器能夠訪問整個光電二極管陣列中的各個像素數據,所以它們可用于選擇性地讀取和處理為特定圖像捕獲的像素的選定部分。這種技術稱為開窗(或感興趣的窗口讀數),并極大地擴展了這些傳感器的圖像處理能力。窗口通過定時和控制電路直接在芯片上進行控制,從而可以以一對一的像素分辨率訪問和顯示陣列有效區域內任何位置的任何尺寸的窗口。
當需要對圖像的一個子區域中的對象進行時間運動跟蹤時,此功能可能非常有用。它也可以用于對選定部分或整個圖像進行電子平移,縮放,加速讀出和傾斜操作的片上控制。 大多數高端CMOS傳感器具有幾種讀出模式(類似于CCD傳感器中采用的讀出模式),以提高軟件接口編程和快門的多功能性。漸進式掃描讀出模式使光電二極管陣列中每一行中的每個像素都可以從左上角開始一直到右下角連續訪問(一次一個像素)。另一種流行的讀出模式被稱為交錯,并且通過在兩個連續場讀取的像素數據進行操作,一個奇數場,隨后一個偶數領域。這些字段從陣列的頂部到底部以行的形式交替出現,并且在讀取下一組之前,順序記錄一組的每一行。例如,在具有40個像素行的傳感器中,首先讀取到第39行的第一,第三,第五等,然后是第二,第四,第六,直到第40行。
CMOS圖像傳感器中的電子快門需要在每個像素上添加一個或多個晶體管,考慮到大多數設備中已經受到損害的填充因子,這是一種不切實際的方法。對于大多數區域掃描圖像傳感器來說就是這種情況。然而,已經開發了具有將快門晶體管放置在像素有源區域附近的線掃描傳感器,以減小填充因子負載。許多設計人員已經實現了一種非均勻滾動快門解決方案,該解決方案利用最少的像素內晶體管以不同的時間間隔對陣列中的連續行進行曝光。盡管滾動快門機制對于靜止圖像運作良好,但它們會產生運動模糊,從而導致高幀速率下的圖像失真。為了解決這個問題,工程師們精心制作統一的同步快門設計可一次曝光整個陣列。由于此技術在每個像素處都需要額外的晶體管,因此除非同時實現較大的像素,否則填充因子比例會有所折衷。?
? CMOS圖像傳感器的動態范圍由光電二極管累積的最大信號電子數(電荷容量)除以傳感器讀取噪點的所有成分的總和(本底噪點)確定。),包括在特定積分時間內產生的時間噪點源。計算中包括了所有暗噪點源(例如暗電流噪點,像素讀取噪點以及信號路徑產生的時間噪點(但不包括光子散粒噪點))的影響。本底噪點限制了圖像暗區中的圖像質量,并且由于暗電流散粒噪點而隨著曝光時間增加。因此,實際上,動態范圍是最大可檢測信號與最小同時可檢測信號(本底噪點)之比。動態范圍通常以灰度,分貝或位來報告,信號電子與噪點之比越高,產生的動態范圍值就越大(分貝或比特越多)。注意,動態范圍由傳感器的信噪特性控制,而位深度是傳感器中使用的模數轉換器的函數。因此,12位數字轉換對應于略高于4,000灰度級或72分貝,而10位數字化可以解析1,000灰度級,這對于60分貝的動態范圍來說是合適的位深度。
隨著傳感器動態范圍的增加,同時記錄圖像中最暗和最亮強度(場景內動態范圍)的能力也得到了提高,檢測器的定量測量能力也得到了提高。該interscene動態范圍代表當針對不同的視場調整檢測器增益,積分時間,鏡頭光圈和其他變量時可以容納的強度光譜。 CMOS圖像傳感器最通用的功能之一就是能夠以很高的幀速率捕獲圖像。這樣可以通過軟件控制的界面記錄延時序列和實時視頻。每秒30到60幀之間的速率很常見,而一些高速成像儀可以達到超過1000的速率。為了生產可拍攝的相機系統,還需要其他支持電路,包括協處理器和外部隨機存取存儲器這些功能的優勢。? ? ? ? ? ? ?
CMOS圖像傳感器是在大批量晶圓工廠中采用公認的標準硅工藝制成的,該工廠還生產相關的芯片,例如微處理器,存儲電路,微控制器和數字信號處理器。巨大的優勢在于,數字邏輯電路,時鐘驅動器,計數器和模數轉換器可與光電二極管陣列放置在相同的硅基板上,并同時放置。這使CMOS傳感器能夠以與其他集成電路類似的方式參與縮小到最小線寬的工藝縮小過程,從而減少重新設計的時間。
即使如此,為了保證具有高性能的低噪點設備,通常必須修改標準CMOS制造工藝以專門容納圖像傳感器。例如,當將標準的CMOS技術用于邏輯芯片中的晶體管結時,將其應用于成像設備時可能會產生高暗電流和低藍光響應。優化圖像傳感器的工藝通常需要權衡取舍,這使制造方案對于普通的CMOS器件不可靠。 在過去的幾年中,像素大小一直在縮小,從1990年代中期主導設備的10-20微米巨型像素到目前席卷市場的6-8微米傳感器。
對微型電子成像設備(例如監視和電話攝像機)的更大需求促使設計人員進一步降低像素尺寸。具有4-5微米像素的圖像傳感器已用于具有較小陣列的設備中,但數百萬像素的芯片將需要3至4微米范圍的像素大小。為了達到這些尺寸,必須在0.25微米或更窄的生產線上生產CMOS圖像傳感器。通過采用更窄的線寬,可以將更多的晶體管封裝到每個像素元素中,同時保持可接受的填充因子,前提是縮放比例因子接近1。用0.13到0。 盡管許多CMOS制造工廠缺少添加濾色器和微透鏡陣列的工藝步驟,但是隨著市場需求的增長,這些步驟正越來越多地用于圖像傳感器的生產。
另外,對于成像設備至關重要的光學包裝技術需要潔凈室和平板玻璃處理設備,這在制造標準邏輯和處理器集成電路的工廠中通常不存在。因此,用于圖像傳感器制造的增加成本可能是巨大的。? ? 在過去的幾年中,CMOS圖像傳感器的應用列表急劇增加。自1990年代后期以來,CMOS傳感器已在越來越多的應用程序(例如傳真機,掃描儀,安全攝像機,玩具,游戲,PC攝像機和低端消費類攝像機)中銷售的成像設備中占了越來越大的比例。
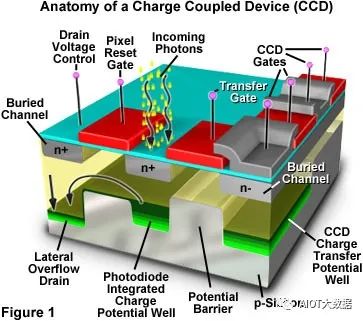
未來幾年,多功能傳感器也可能會開始出現在手機,條形碼閱讀器,光電鼠標,汽車甚至家用電器中。由于CMOS傳感器能夠以高幀頻捕獲連續圖像,因此它們越來越多地用于工業檢查,武器系統,流體動力學和醫學診斷。電荷耦合器件(CCD)的結構圖 電荷耦合器件(CCD)是基于硅的集成電路,由密集的光電二極管矩陣組成,該矩陣通過將光子形式的光能轉換為電荷來工作。由光子與硅原子相互作用產生的電子被存儲在勢阱中,隨后可以通過寄存器在芯片上傳輸并輸出到放大器。圖1所示的示意圖顯示了組成典型CCD解剖結構的各種組件。
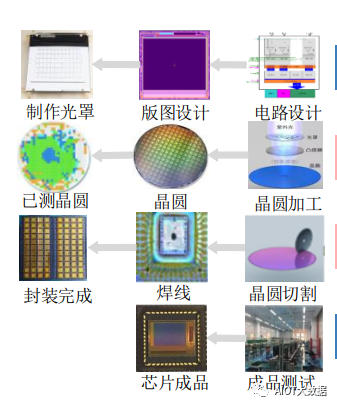
CCD是貝爾實驗室的研究科學家于1960年代后期發明的,他們最初將這種想法設想為一種新型的計算機存儲電路。后來的研究表明,該設備由于具有轉移電荷的能力以及與光的光電相互作用,對于其他應用(如信號處理和成像)也很有用。新型存儲設備的早期希望幾乎消失了,但CCD已成為通用電子成像檢測器的主要候選者之一,該電子檢測器能夠替代新興的數字顯微成像領域的膠片。? ? CCD是在類似于集成電路的硅晶片上制造的,它通過一系列復雜的光刻步驟進行處理,這些步驟包括蝕刻,離子注入,薄膜沉積,金屬化和鈍化,以定義器件內的各種功能。硅基板被電摻雜以形成p型硅,p型硅是其中主載流子為帶正電的電子空穴的材料。在用金剛石鋸切割之前,在每個晶片上制造多個裸片,每個裸片都可以生產工作裝置,然后進行測試,然后將其封裝到帶有玻璃或石英窗的陶瓷或聚合物外殼中,光可以通過該窗口照亮光電二極管陣列在CCD表面上。
當紫外線,可見光或紅外光子撞擊位于CCD光電二極管中或附近的硅原子時,通常會產生一個自由電子和一個由硅晶格中電子暫時不存在而產生的“空穴”。然后將自由電子收集在勢阱中(位于耗盡層所在區域的硅深處),同時迫使空穴遠離阱,將其轉移到硅襯底中。各個光電二極管通過通道停止器與其相鄰器件電隔離,該通道停止器是通過將硼離子通過掩模擴散到p型硅襯底中而形成的。
CCD的主要結構特征是大量的串行移位寄存器,這些移位寄存器由垂直堆疊的摻雜多晶硅導電層構成,該導電層通過二氧化硅絕緣薄膜與硅半導體襯底隔開(見圖2)。在陣列的每個光電二極管內收集了電子之后,將電壓電勢施加到多晶硅電極層(稱為柵極),以改變下面的硅的靜電電勢。
然后,直接位于柵電極下方的硅襯底變成勢能阱,其能夠收集由入射光產生的局部產生的電子。相鄰的柵極通過形成較高勢能的區域(稱為勢壘)來幫助將電子限制在勢阱內,井周圍。通過調制施加到多晶硅柵極的電壓,可以對它們施加偏壓,以形成勢阱或對光電二極管收集的積分電荷的勢壘。 常見的CCD設計具有一系列門元件,這些門元件通過在水平行中排列的三個勢阱將每個像素細分為三分之二。每個光電二極管的勢阱都能容納許多電子,這些電子決定了CCD動態范圍的上限。在被稱為積分的一段時間內被入射光子照射后,CCD光電二極管陣列中的勢阱被在硅襯底的耗盡層中產生的電子充滿。通過將累積電荷串行和并行傳輸到芯片邊緣的單個輸出節點的組合,可以完成對所存儲電荷的測量。并行電荷轉移的速度通常足以在下一個圖像的電荷積分期間完成。? ?
在被收集到勢阱中之后,電子通過垂直移位寄存器時鐘產生的信號平行移動,一次移動一行。電子以多步過程(從兩步到四步不等)跨過每個光電二極管傳輸。通過將保持阱的電位更改為負值,同時將下一個電極的偏壓增加到正值,可以實現此偏移。垂直移位寄存器時鐘周期地操作以改變垂直柵極的交替電極上的電壓,從而使累積的電荷跨過CCD移動。圖1示出了與位于一行CCD柵極內的傳輸柵極相鄰的光電二極管電勢良好。 遍歷并行移位寄存器門陣列后,電荷到達稱為串行移位寄存器的專門門行。在此,代表每個像素的電子包在水平移位寄存器時鐘的控制下依次水平移位到輸出放大器并移出芯片。水平移位寄存器的全部內容在從并行寄存器加載下一行電荷包之前被傳輸到輸出節點。在輸出放大器中,電子包在從第一行開始到最后一行的單行中記錄從左到右連續的光電二極管產生的電荷量。這將對來自光電二極管傳感器元件的整個二維陣列的光生電荷進行模擬光柵掃描。
在我們對“數字成像技術的概念”的回顧中,其他章節將討論各種各樣的CCD元件和設計。其中包括幾個建筑圖案,防起霜的電子漏極,微透鏡陣列,像素合并,時鐘方案,掃描格式,以及對電荷耦合器件的理論和操作有基本了解的其他主題。?
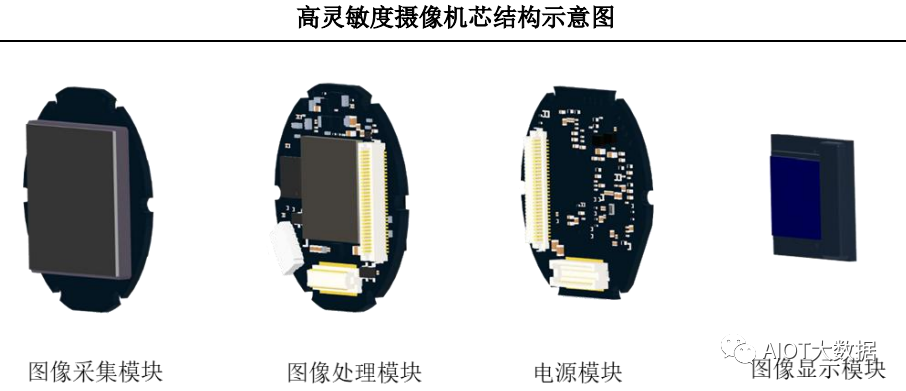
? 高靈敏度攝像機芯 高靈敏度攝像機芯作為一種光電成像器件,被廣泛應用于各種暗光環境成像的整機設備,是高靈敏度成像設備的核心器件。 ? 在沒有人工光源照明的夜間,處于自然環境中的物體仍受到月光、星光、大氣輝光等自然光源的照射,這些微弱的光被物體反射后,經過光學系統收集匯聚到高靈敏度圖像傳感器芯片上,由圖像傳感器芯片進行光電轉換變成原始的數字圖像。原始的數字圖像經過運行于機芯內的圖像處理模塊處理后,得到亮度適中、對比自然、成像細節豐富的數字圖像。處理后的數字圖像根據應用場景的需要,可進一步實現數字圖像的顯示、存儲、傳輸和識別等功能。? ?
?
? ?
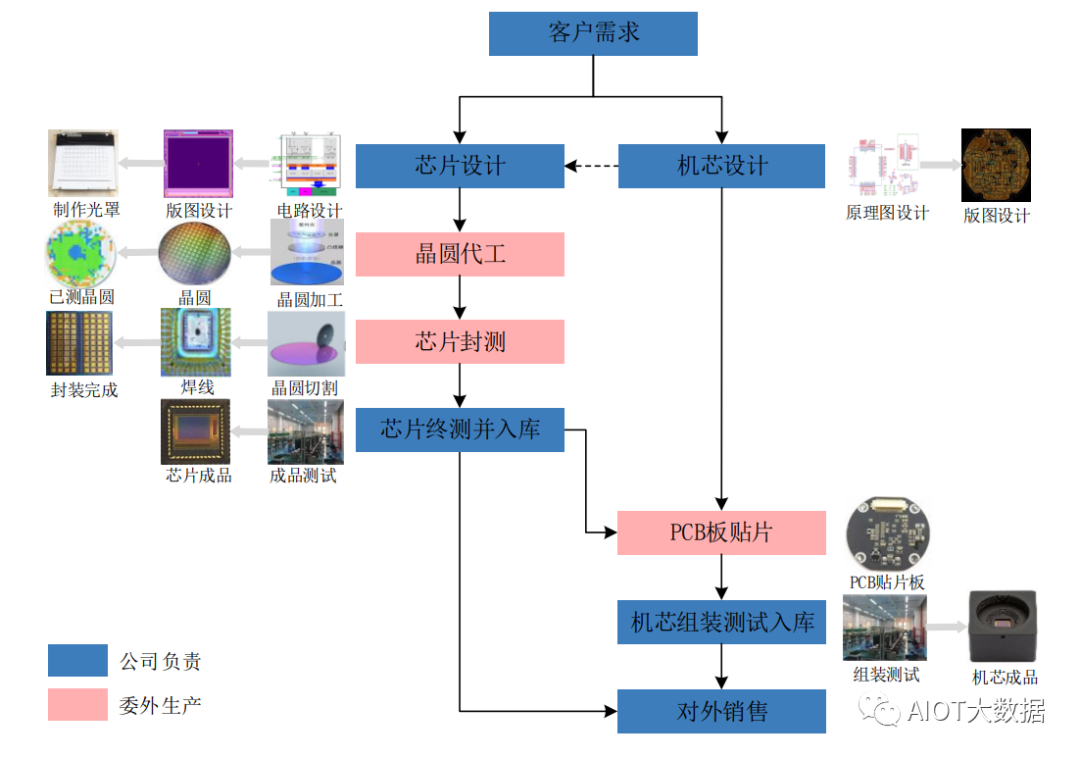
芯片產品設計: 芯片設計主要包括頂層方案設計、像素設計、模擬電路設計、數字電路設計、版圖布局布線和全定制設計、寄生參數抽取后仿真與整體芯片功能驗證等環節。 頂層方案設計:將所定義的項目規格細化成功能模塊和系統架構; 像素設計:設計出滿足項目需求的像素結構、版圖、操作時序,優化靈敏度、暗電流等指標; 模擬電路設計:設計包括模數轉換器、鎖相環、行列驅動電路、參考電壓、帶隙基準等圖像傳感器需要的電路模塊。
對各模塊進行仿真并優化,使模塊性能滿足芯片需求; 數字電路設計:芯片系統控制、像素時序和模擬電路控制以及圖像處理的電路設計,并進行仿真驗證; 版圖設計:根據像素、模擬電路、數字電路的設計進行全定制的版圖設計和標準單元布局布線,并抽取出寄生的電容電阻參數; 寄生參數抽取后仿真:根據版圖設計抽取出的寄生參數進行后仿真以驗證前面設計的正確性,并修改不滿足規格的設計;? ? 整體芯片功能驗證:最終將設計好的芯片進行整體后仿真,驗證芯片的功能,驗證通過后交付流片。
機芯產品設計: 機芯設計主要是在芯片設計完成后,進行方案設計、硬件設計、FPGA開發、軟件開發以及各個設計環節的檢查確認等工作。 方案設計:包括確定供電方式、視頻輸出格式、FPGA型號、機芯的機械尺寸、環境適應性要求、可靠性要求等指標; 硬件設計:包括機芯硬件電路的原理圖設計、版圖設計、機芯中墊片和外殼的結構設計。硬件設計結束并經過檢查確認后,輸出外協供應商所需要的各種工藝文件,以便進行電路板生產、電路板貼片和機械結構件的生產; FPGA開發:包括機芯中圖像處理算法研究、Verilog代碼編寫、功能仿真和板級調試。
設計結束并經過檢查確認后,輸出可以燒錄到FPGA芯片中的配置文件,使FPGA芯片具有圖像處理功能和其他輔助功能; 軟件開發:包括Linux下各外設的驅動程序開發、Linux下應用程序開發、MCU中固件的開發、上位機軟件的開發以及圖像質量優化。 所有的開發工作完成后,還需要進行整機測試,確保設計的功能、性能、環境適應性和可靠性達到了預定的目標。
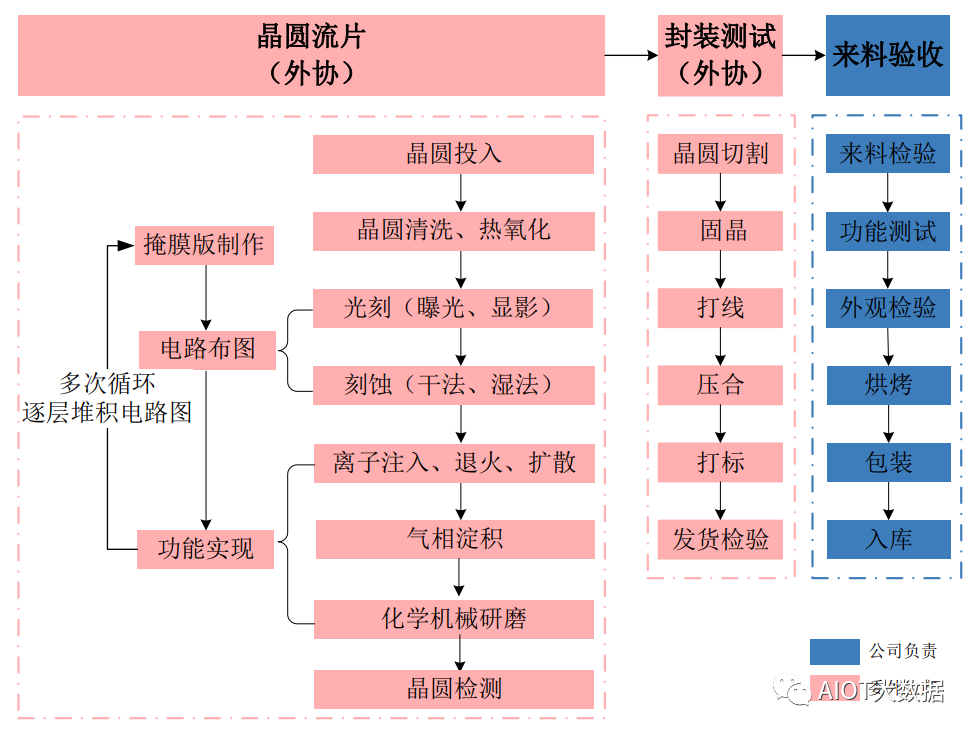
芯片產品和機芯產品設計完成后,先后經過初樣階段和正樣階段:初樣階段完成首件產品的制作,正樣階段對初樣階段的設計結果和生產過程工藝參數進行再驗證。經評審小組評審合格后進入設計定型階段,最終制定產品使用說明書、技術文件、工藝文件、產品驗收規范等標準文件。設計定型后的產品進入生產定型階段,在產品質量穩定性和批量生產條件達到要求后對產品進行生產定型。? ? 生產流程
CMOS圖像傳感器行業發展及市場概況 (1)圖像傳感器行業概況 圖像傳感器是將光信號轉換為電信號的裝置,采用感光單元陣列和輔助控制電路獲取目標物體的亮度和色彩信號,并通過復雜的信號處理和圖像處理技術輸出數字化的圖像信息,在攝像、數字電視、可視通信領域中應用廣泛。 圖像傳感器主要分為CCD圖像傳感器(Charge-CoupledDevice,電荷耦合器件)與CMOS圖像傳感器(ComplementaryMetalOxideSemiconductor,互補金屬氧化物半導體)。 在CCD圖像傳感器中,光信息以電荷的形式保存在每一個像素中,在CCD圖像傳感器進行讀出時,每一個像素內部保存的電荷首先在列方向自上而下逐行進行轉移,從一個像素轉移到相鄰的像素中,然后被轉移到位于陣列最下方的橫向寄存器中。
之后再橫向轉移,最終被轉換成電壓信號輸出到傳感器片外,片外系統可以進行放大、模數轉換、數據存儲等操作。? ? 在CMOS圖像傳感器中,通常不能做電荷轉移,電荷在每一個像素內部就已經被轉換成電壓信號,這些電壓信號通過列方向的總線逐行進行讀出。CMOS圖像傳感器基于通用大規模集成電路工藝,具有高度集成的能力,可以把驅動電路、放大及量化電路、數字控制電路、數字處理電路、輸出接口電路等全部集成在傳感器芯片上。
與CCD圖像傳感器相比,CMOS圖像傳感器大幅減少外圍電路的規模,憑借其集成度高、成本低、功耗低、系統設計簡潔等優點,迅速在消費電子市場完成了對CCD圖像傳感器的替代。
(2)圖像傳感器性能參數指標 由于不同的應用領域對CMOS圖像傳感器性能的需求有所不同,企業需要針對客戶的具體需求設計不同類型的CMOS圖像傳感器。CMOS圖像傳感器的性能參數指標如下: ①分辨率 分辨率是衡量圖像傳感器內像素單元數量的一個參數,通常分辨率越高說明包含的像素單元數量越多,對外界場景信息的顯示越細致。分辨率的兩個數字分別表示圖片在水平方向和垂直方向上像素單元的數量,常見的分辨率有640×480、752×576、800×600、1024×768、1280×720、1920×1080等,更高的分辨率意味著設計及工藝難度越高。
②像素尺寸 像素尺寸是衡量單個像素大小的一個參數。一方面,像素尺寸越小,單位面積上集成的像素就越多,可以提高圖像傳感器的分辨率;另一方面,像素尺寸越大,圖像傳感器的靈敏度越高,噪聲越小。小像素和大像素均有獨特的設計難度和工藝難度。 ③靈敏度 靈敏度是衡量圖像傳感器對光線敏感程度的一個參數。靈敏度的常用單位是V/lx·s,表示1lx的光線下每秒鐘像素輸出的電壓信號值。靈敏度數值越高,單位時間內圖像傳感器的產生的信號電壓越高,圖像信噪比越高。?
? ④靶面尺寸 靶面尺寸是衡量圖像傳感器感光部分大小的一個參數,通常指傳感器感光面積的對角線長度,用英寸表示。 ⑤幀率 幀率是衡量圖像傳感器在單位時間內所記錄圖像數量的一個參數,通常指一秒內圖像傳感器輸出的圖像幀數。幀率越高,對拍攝高速運動的物體越有利。同時,隨著幀率的升高,曝光時間變短,對低照度環境下的拍攝不利。 ⑥動態范圍 動態范圍是衡量圖像傳感器對同一場景下不同光照條件的采集能力的一個參數,通常指圖像傳感器能夠探測的最大和最小的光強的比例。動態范圍越大,圖像所能呈現的層次越豐富。
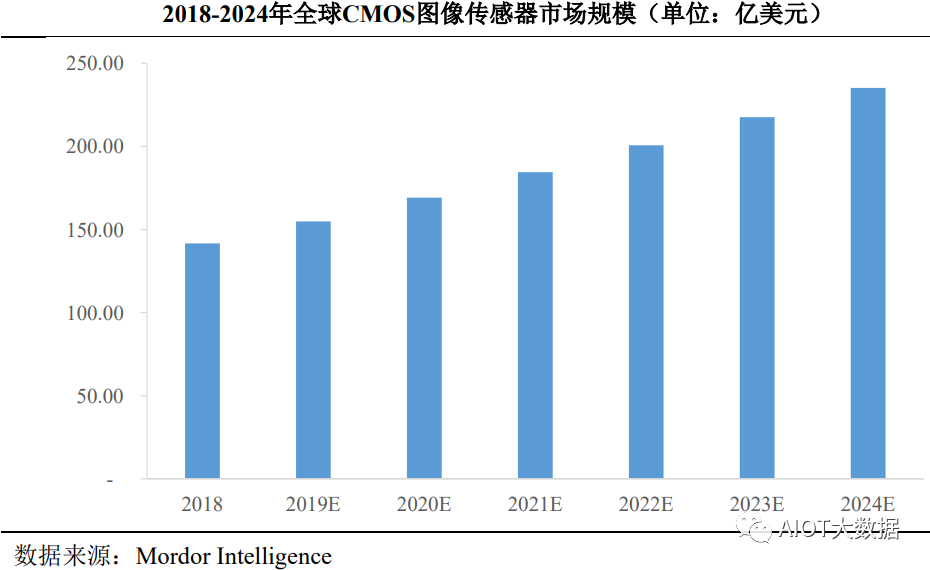
(3)行業市場規模 ①全球CMOS圖像傳感器市場規模及分布 CMOS圖像傳感器在消費電子、安防、車載、工業、醫療等領域具有廣泛的應用。根據MordorIntelligence的數據,2018年全球CMOS圖像傳感器市場規模達到141.60億美元。 未來,隨著人工智能與傳統領域的不斷融合,人臉識別、自動駕駛、機器視覺等技術將日臻成熟,CMOS圖像傳感器作為圖像識別的關鍵部件,其市場規模將會進一步增長。根據MordorIntelligence的數據,預計到2024年全球CMOS圖像傳感器市場規模將達到235.20億美元,2018年到2024年的年均復合增長率為8.83%。? ?
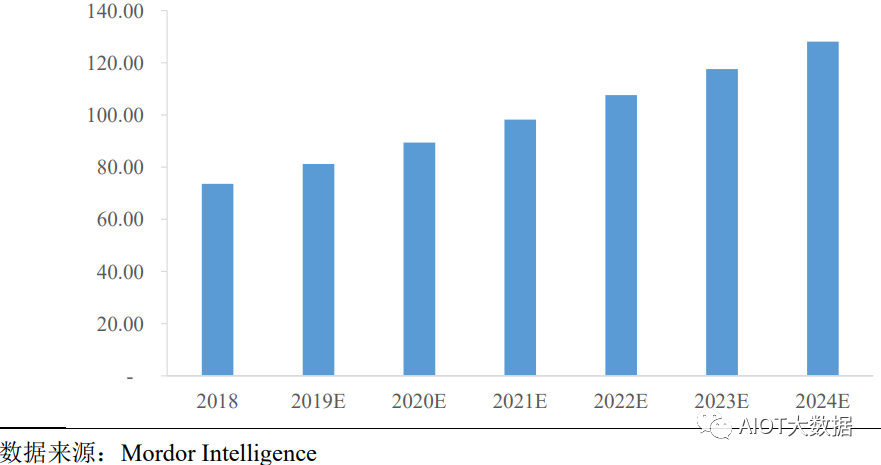
②中國CMOS圖像傳感器市場規模 隨著我國經濟水平的發展,消費電子、安防、車載等領域圖像傳感器市場需求都有較快增長。為推動整體智能制造的水平,我國正加大對人工智能領域的研發資源投入,從而進一步帶動下游應用領域對圖像傳感器的需求。根據MordorIntelligence的數據,2018年中國CMOS圖像傳感器市場規模達到73.60億美元,預計到2024年將達到128.10億美元,年均復合年增長率為9.68%,高于全球整體的平均增速,具有良好的增長前景。
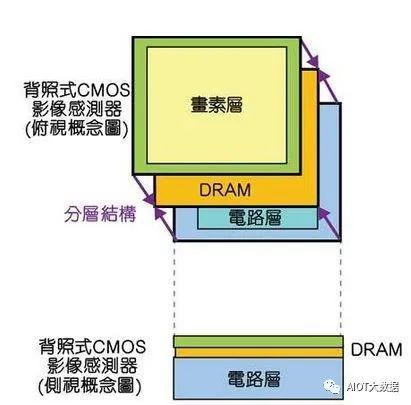
? ? 行業下游產業發展情況及未來發展趨勢 (1)安防行業 在安防行業,安防視頻監控系統需要使用大量圖像采集攝像頭。根據MordorIntelligence的數據,2019年全球視頻監控系統市場規模為524.50億美元,隨著各行業對于視頻監控系統的需求增加,預計到2025年全球視頻監控系統市場規模將達到903.70億美元,復合年增長率為9.49%。 因此,隨著安防視頻監控領域需求的不斷提高,攝像頭行業的需求將進一步增長。 (2)車載行業 在汽車行業,圖像傳感器主要用于后視攝像(RVC)、全方位視圖系統(SVS)、攝像機監控系統(CMS)、FV/MV(汽車前視攝像、運動攝像)、DMS/IMS(汽車駕駛員監控系統和汽車座艙監控系統)等系統。 目前,汽車行業正處于自動化和智能化的趨勢中,而自動化和智能化需要在各種光線條件下實現更清晰的成像,以實現汽車的輔助駕駛乃至全自動駕駛。因此,隨著汽車自動化和智能化水平的不斷提高,攝像頭行業的需求將進一步增長。 (3)消費電子行業 在消費電子行業,移動領域開始使用多相機成像系統,設立一個或多個輔助相機,從而改善主相機的成像質量。同時,基于圖像傳感器的生物安全認證技術也在全面屏的浪潮中迅速發展,如屏下指紋識別、人臉識別等。隨著消費電子領域需求的不斷提高,攝像頭行業的需求將進一步增長。? ? ? CMOS圖像傳感器作為攝像頭的核心部件,在安防、車載、消費電子等領域的需求帶動下,市場需求將不斷增長。 工藝持續創新,定制化趨勢明顯 CMOS圖像傳感器的制造工藝主要分為前照技術(FSI,FRONT-SIDEILLUMINATED)和背照技術(BSI,BACK-SIDEILLUMINATED)。? ?
?
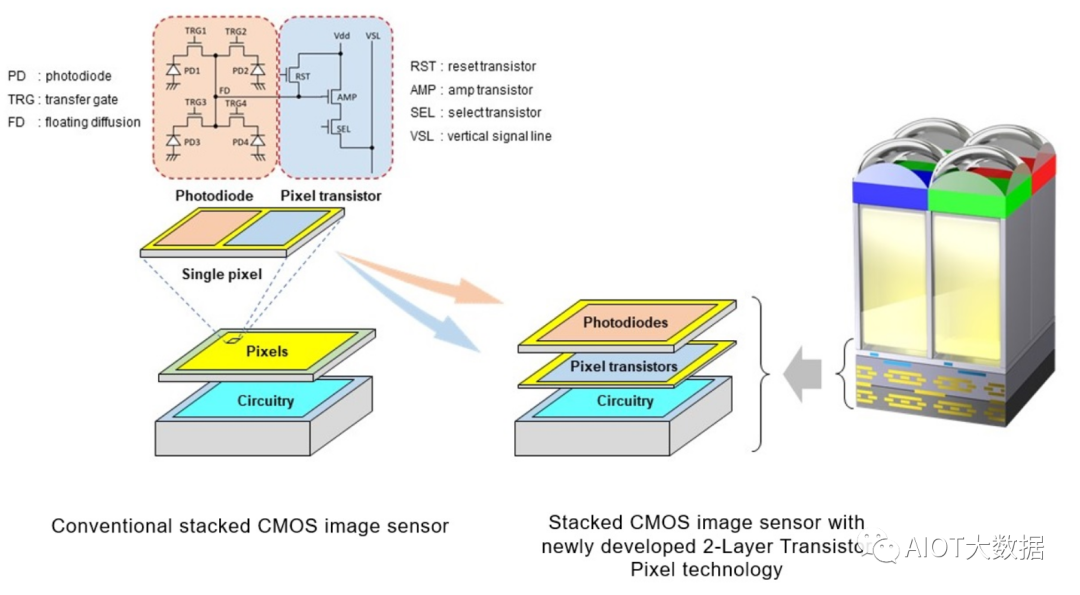
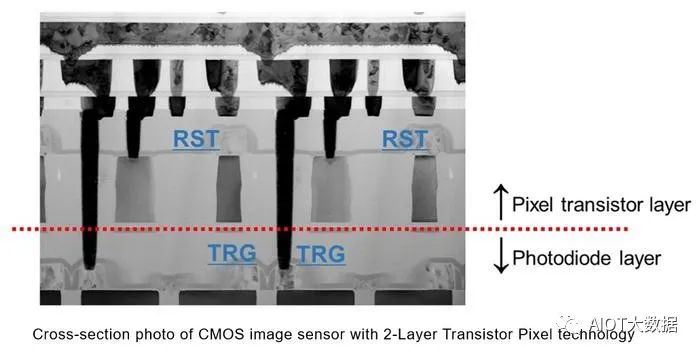
按照索尼解析,兩層晶體管像素的堆疊式CMOS圖像傳感器是把在一片襯底上的光電二極管和像素晶體管分離到不同襯底上,這樣光電二極管表面積能夠翻倍,能夠接收到更多光線,讓飽和信號水平大約增加了一倍,結果就是大幅度改善動態范圍與噪聲(噪點)表現。為了把光電二極管和像素晶體管所在兩片襯底連接在一起,索尼使用了新技術。按照KeiichiNakazawa說法,因為傳感器的像素非常小,光電二極管和像素晶體管對準精度達到了納米級,因此使用了一項名為為3D順序集成的工藝技術,會在生產過程中直接襯底連接在一起,而不是像傳統那樣,在生產完芯片后再連接在一起。同時索尼使用新的連接結構,讓耐熱性從傳統400℃提升到1000℃。? ?
? ? ? ? ?
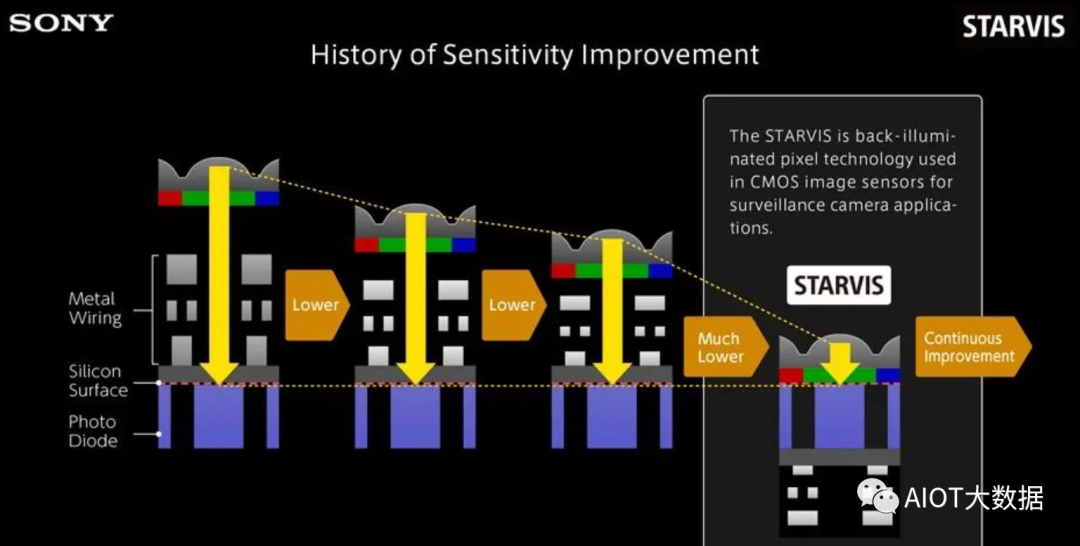
前照技術中濾鏡與光電二極管間夾雜的大量金屬連線對進入傳感器表面的光線存在較大的散射,圖像信噪比較低。背照技術中金屬連線和光照分別位于光電二極管的兩面,大幅度降低了光的散射,提高圖像信噪比,同時,可以配合更復雜的電路設計來提升傳感器讀取速度和動態范圍。 在普通背照工藝的基礎上,將讀出電路等信號處理模塊與像素陣列分離至不同的硅片上,利用硅通孔和引線鍵合等三維互連技術將不同功能的硅片進行連接,形成了3D集成背照工藝。3D集成背照工藝改善了像素和處理電路工藝差異導致的成像質量問題,大幅降低了處理電路對像素陣列的干擾,提升了圖像的信噪比,同時能夠在相同的面積下實現更加復雜的成像功能。 不同的應用領域對CMOS圖像傳感器特性的要求不同,因此在工藝的開發和運用上表現出較強的定制化特點。在消費電子領域,尤其是便攜設備,微型化的需求促使工藝向3D集成背照工藝發展。在高靈敏度成像、工業機器視覺以及醫療影像等領域,相比于體積,對CMOS圖像傳感器的靈敏度、動態范圍、抗模糊、抗偽影以及使用壽命等方面的指標要求更高。? ? 因此,在這些領域需要根據具體的實際需求,選擇合適的工藝并在此基礎上進行工藝的二次開發,如提升靈敏度采用的厚外延層工藝、抗模糊采用深溝隔離工藝等。 產品應用往低照度、超高速及三維成像等方向發展 低照成像技術:近年來,業內廠商開發出多種提升光電轉換效率的新工藝,顯著提升了圖像傳感器的感光靈敏度,配合創新的低噪聲讀出電路設計,顯著改善了圖像傳感器在低照度環境下的成像質量。 高速成像技術:高速成像技術可以通過不同的方式實現,一種是3D集成背照工藝,3D集成背照工藝為CMOS圖像傳感器引入像素級高速緩存,使得圖像傳感器能夠在短時間內大幅提升幀頻,獲得的圖像以較高速度存入緩存中,隨后以較低速度對外輸出,從而實現對高速運動物體的清晰成像。 另一種是以事件化成像為代表的仿生成像技術,仿生成像技術為高速成像提供了一種全新的思路,其能夠有效抑制動態場景成像時冗余的靜態背景,大幅精簡輸出數據量,從而實現超高速成像。
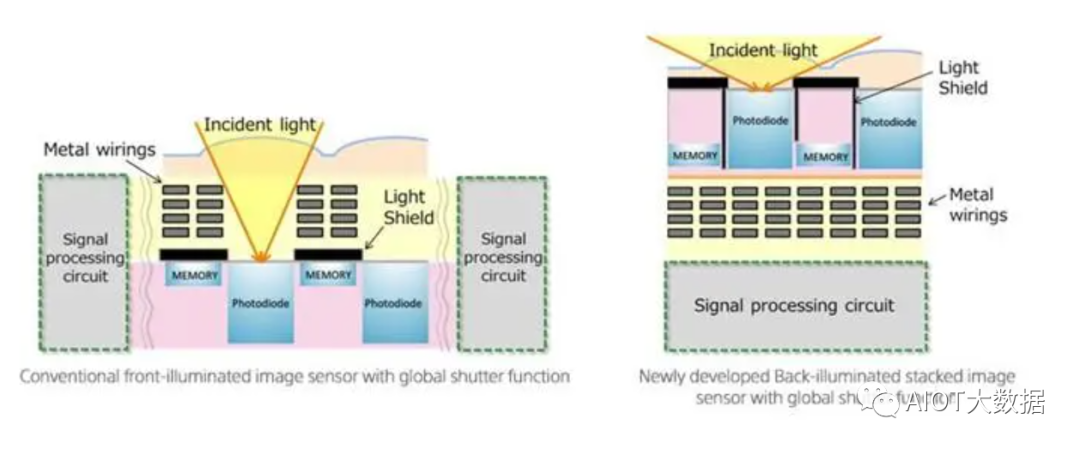
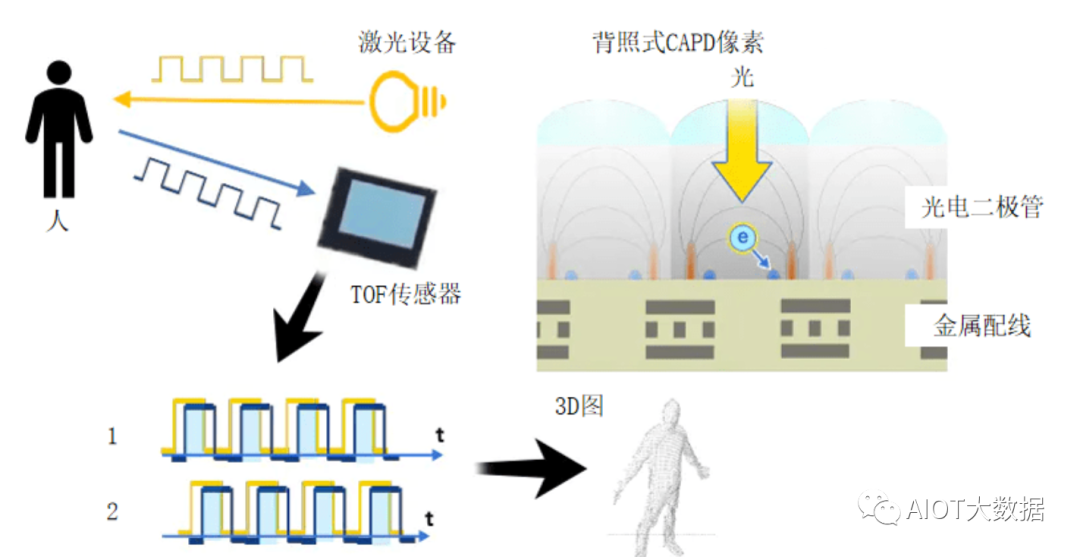
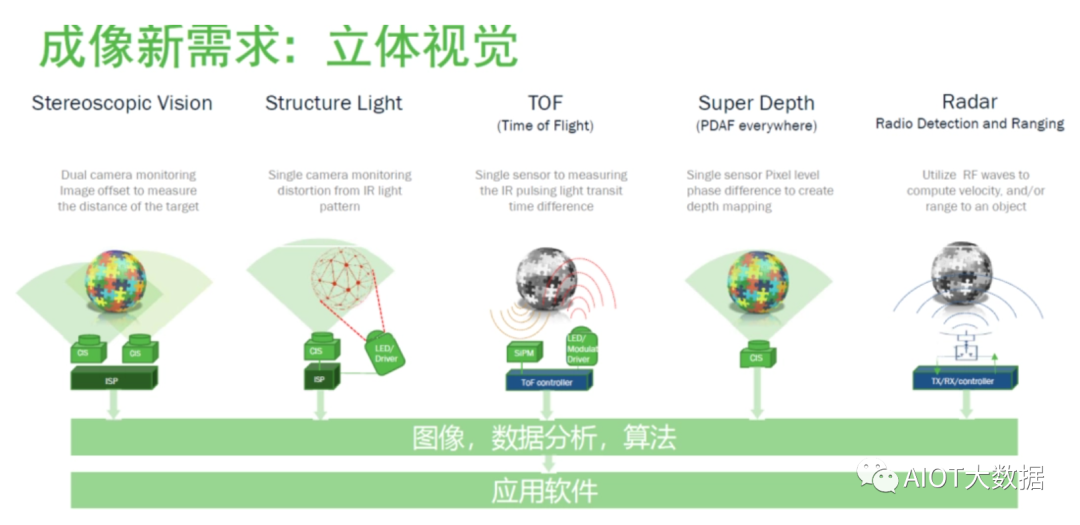
圖:索尼新圖像傳感器技術,兼具全局快門功能和背照式結構 ? ? 三維立體成像技術:相較于二維圖像,三維立體成像新增了距離信息,從而實現了具備立體感的空間成像功能。目前主要的三維立體成像技術有利用視差實現的雙目立體視覺傳感器(stereovisionsensor)、利用三角幾何關系實現的結構光三維圖像傳感器(structuredlight3Dimagingsensor)以及基于發送和接收端光相位差計算距離的飛行時間圖像傳感器(time-of-flightimagesensor)等。 后兩者一般以激光雷達(lightradar,LiDAR)的形態出現,包含激光發射器和信號接收端,CMOS圖像傳感器為信號接收端的核心,在三維立體成像領域發揮著重要作用。
?
圖像傳感器的設計和制作 圖像傳感器的設計和制作傳統上采用電荷藕合器件(chargecoupleddevice,ccd)工藝。在1980-1990年代,ccd工藝由于在消費類相機上的應用,贏得巨大發展。然而在2005年后ccd在消費領域的應用快速被互補金屬氧化物半導體工藝(complementarymetaloxidesemiconductor,cmos)取代。原有的ccd生產線紛紛關廠停線,迄今為止全世界已經剩下很少的ccd產線了。然而tdi圖像傳感器的設計制作一直到現在還部分使用ccd工藝,其原因就是tdi圖像傳感器的工作原理依賴于ccd的操作方式。? ? 考慮到ccd工藝線的退出,從2012年開始,部分公司研究在cmos工藝上嵌入類似ccd功能的器件,稱之為嵌入式ccd(eccd,embeddedccd),以此制作tdi圖像傳感器。
這種圖像傳感器基于cmos工藝的基礎上,所以稱之為tdi-cmos圖像傳感器,核心是eccd。比較而言,把原來基于ccd工藝基礎上的圖像傳感器稱為延遲積分cmos(timedelayintegration–cmos,tdi-ccd)圖像傳感器。 ECCD技術在通用CMOS集成電路工藝的基礎上,嵌入CCD工藝模塊,將圖像感光(CCD)與采集處理(CMOS)集成在同一塊芯片:利用CCD工藝,實現光電轉換和無噪聲電荷疊加;利用CMOS工藝,將復雜的圖像信號采集量化電路功能集成到芯片中,有效提高圖像質量。公司自主研發的ECCD圖像傳感器同時擁有CCD像素低噪聲的特點和CMOS電路高集成度的特點。
ECCD工藝是CCD和CMOS兩種圖像傳感器工藝的集大成者,目前全世界僅有少數幾家企業掌握ECCD工藝。 每個ccd像素單元包括4個多晶硅電極,在強光的條件下,電極下方溝道的電子達到滿阱后溢出到相鄰電極或溝道的現象,,稱為彌散現象(blooming)。彌散現象會對相鄰的溝道產生干擾,導致相鄰溝道的電子數增加,使得像素輸出增大,輸出圖像出現光暈。 因此,需要一種抗彌散方法以解決強光條件下電子滿阱后溢出干擾相鄰電極或溝道問題。 ? ? ? ? ?
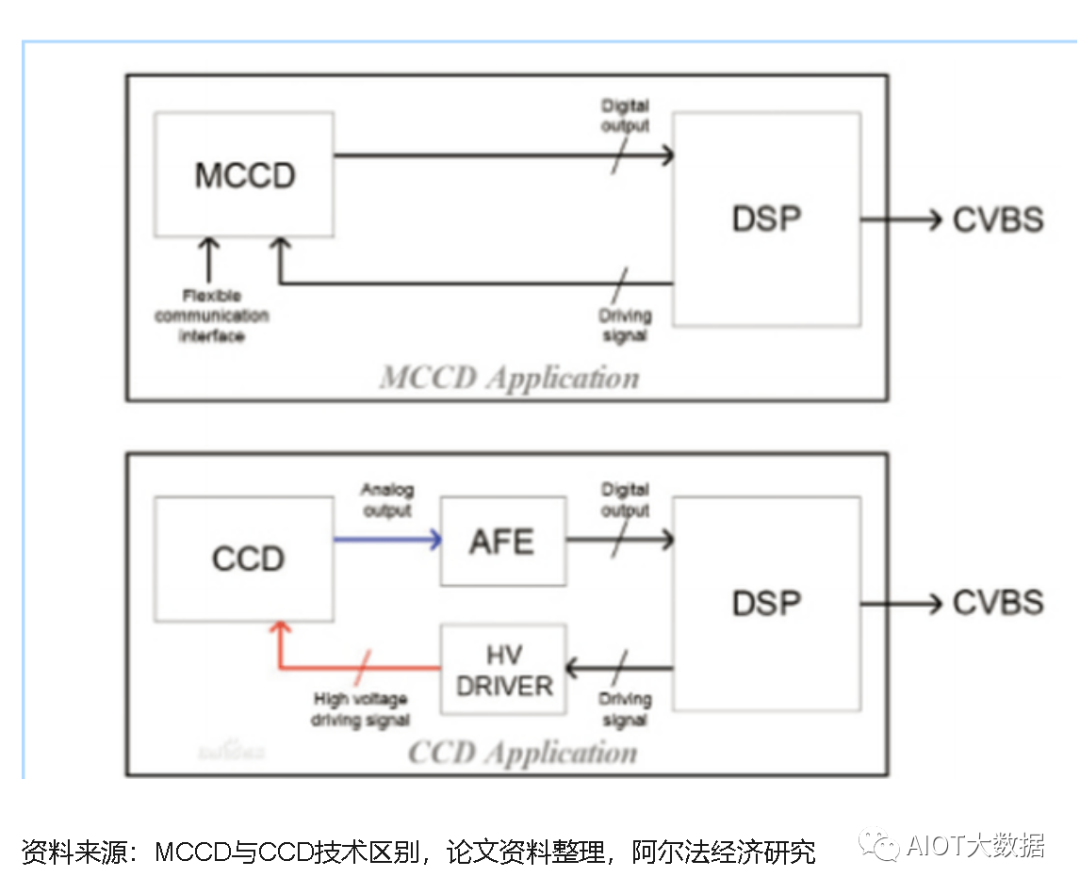
MCCD汲取了CMOS與CCD的特點,將圖像傳感器像素的靈敏度及畫質推上了一個更高的臺階。MCCD具有比CCD更高的可見光靈敏度及超高的近紅外靈敏度、更大的動態范圍。MCCD使用與CCD兼容的曝光、讀出控制方式,MCCD是與CCD相同的被動器件。MCCD又利用CMOS工藝集成度高的特點,將圖像信號采集量化電路集成到芯片中,有效提高了圖像質量。
在技術層面,MCCD的特點如下:高性能、高靈敏度的像素設計是MCCD的技術優勢;采用了高速并行技術,幀速每秒超過2000幀;銳芯微提供的安防解決方案中,采用的全局結合滾動高速曝光模式可以實現高速紅外三位影像捕捉;第四是防蒙塵技術能夠消除50%以上的圖像固形噪聲,提高了換面品質。 ? ? ? ? ?
資料來源:銳芯微MCCD傳感器 在需求保持高速增長的同時,不同領域的市場熱點也呈現“百花齊放”的特點。 消費電子領域中,移動設備領域的多相機成像系統、屏下指紋識別、人臉識別等技術的成熟應用將進一步提升CMOS圖像傳感器的市場需求。 汽車領域中,輔助/自動駕駛的車載LiDAR系統具有厘米級精度,可以對三維空間進行精準分辨,而基于CMOS圖像傳感器的固態/混合態車載LiDAR因其低成本的優勢開始迅猛發展。 安防領域中,作為數據獲取的最主要來源,CMOS圖像傳感器在智慧城市的建設中將得到更加廣泛的應用。 醫療影像領域中,在放射性檢查(X光檢查和CT掃描)中,CMOS圖像傳感器作為圖像接收器,已經全面取代傳統的真空管等非固態電子器件。
工業控制領域中,隨著工業4.0時代的到來,基于圖像傳感器的機器視覺的應用也日益廣泛。 國產化是未來發展趨勢 CMOS圖像傳感器已經經歷了二十多年的快速發展,絕大多數的高端技術仍然掌握在歐美和日韓廠商手中。由于技術壁壘和資金問題,國內CMOS圖像傳感器技術發展一直比較緩慢,在早期僅有部分高校和研究機構開展有限的研究,無法實現批量化生產。 21世紀初,國內有一批從事CMOS圖像傳感器設計的企業成立,包括銳芯微電子、格科微電子(上海)有限公司、北京思比科微電子技術股份有限公司、江蘇思特威電子科技有限公司等。未來,在芯片“自主、安全、可控”的戰略指引下,CMOS圖像傳感器核心技術國產化進程將日益加速,國內廠商將逐漸成為產業的核心力量。? ?
主要競爭對手 (1)索尼(SONY)索尼是日本的一家全球知名的大型綜合性跨國企業集團,是世界視聽、電子游戲、通訊產品和信息技術等領域的先導者之一。在CMOS圖像傳感器領域,索尼是市場占有率最大的廠商。索尼公司在2012年推出堆棧式(Stacked)CMOS技術,可使整顆組件在同尺寸規格下得到更多的空間來獲得更大面積的感光范圍。長期以來,索尼在高端CMOS圖像傳感器市場保持較為顯著的技術優勢。
(2)豪威科技(Omnivision)豪威科技成立于1995年,是一家專業開發高度集成CMOS圖像傳感器的企業。豪威科技與日本索尼、韓國三星并稱為全球領先的三大主要圖像傳感器供應商,目前在車載、安防及手機領域擁有較高的市場占有率。2019年7月,豪威科技被韋爾股份(603501.SH)收購。(3)安森美半導體(ONSemiconductor)安森美半導體于1999年從摩托羅拉分拆出來,是一家研發高能效電子產品的芯片供應商。安森美半導體的產品包括電源和信號管理、邏輯、分立及定制器件等。圖像傳感器業務也是安森美的一個重要業務分支,其圖像傳感器產品在汽車,工業與消費三大領域具有較強的市場競爭力,也向客戶提供定制圖像傳感器設計服務。
(4)格科微電子(上海)有限公司格科微電子(上海)有限公司(以下簡稱“格科微”)成立于2003年,主要從事CMOS圖像傳感器、LCDDriver、高端嵌入式多媒體SOC芯片及應用系統的設計開發和銷售,其產品主要用于手機和平板電腦領域。(5)江蘇思特威電子科技有限公司江蘇思特威電子科技有限公司(以下簡稱“思特威”)成立于2011年,主要從事CMOS圖像傳感器芯片研發與設計,其產品主要應用于安防監控、車載影像、機器視覺及消費類電子產品(運動相機、無人機、掃地機器人、智能家用攝像頭)等領域。 ? ? ? ? ?
編輯:黃飛
?















 工商網監
工商網監
評論