 電子發(fā)燒友App
電子發(fā)燒友App


本篇文章為大家介紹一種新穎且經(jīng)濟(jì)高效的重建方案,利用預(yù)先建立的激光雷達(dá)地圖作為固定約束,有效解決了單目相機(jī)重建中存在的尺度問題。
作者:
Chunge Bai , Ruijie Fu and Xiang Gao
先進(jìn)的單目相機(jī)重建技術(shù)主要依賴于運(yùn)動(dòng)恢復(fù)結(jié)構(gòu)(Structure from Motion,SfM)方案。然而這些方法通常產(chǎn)生的重建結(jié)果缺乏關(guān)鍵的尺度信息,隨著時(shí)間的推移,圖像的累積導(dǎo)致不可避免的漂移問題。相比之下,基于激光雷達(dá)掃描幀的地圖方法在大規(guī)模城市場(chǎng)景重建中很受歡迎,因?yàn)樗鼈兙哂芯_的距離測(cè)量能力,這在基于視覺的方法中基本上是缺失的。研究人員嘗試?yán)猛瑫r(shí)進(jìn)行的激光雷達(dá)和相機(jī)測(cè)量來追求在地圖結(jié)果中實(shí)現(xiàn)精確的尺度和顏色細(xì)節(jié)。然而這些結(jié)果受外參校準(zhǔn)和時(shí)間同步精度的影響。本文提出了一種新穎且經(jīng)濟(jì)高效的重建方案,利用預(yù)先建立的激光雷達(dá)地圖作為固定約束,有效解決了單目相機(jī)重建中存在的尺度問題。據(jù)我們所知,我們的方法是第一個(gè)將圖像配準(zhǔn)到點(diǎn)云地圖上而無需同步捕獲相機(jī)和激光雷達(dá)數(shù)據(jù)的方法,使我們能夠在各種感興趣的區(qū)域重建更多細(xì)節(jié)。為了促進(jìn)這一領(lǐng)域的進(jìn)一步研究,我們發(fā)布了Colmap-PCD,這是一個(gè)利用Colmap算法的開源工具,可以實(shí)現(xiàn)對(duì)圖像到點(diǎn)云地圖的精確細(xì)致的配準(zhǔn)。
主要貢獻(xiàn)
實(shí)現(xiàn)圖像與其重建對(duì)象之間的精確2D-3D對(duì)應(yīng)關(guān)系對(duì)于準(zhǔn)確的圖像定位至關(guān)重要,一種有前景的方法涉及在圖像和激光雷達(dá)平面之間建立對(duì)應(yīng)關(guān)系,激光雷達(dá)平面可以被視為來自激光雷達(dá)點(diǎn)云地圖的重建對(duì)象的替代3D特征。為此,我們選擇使用Colmap,這是一個(gè)基于經(jīng)典的運(yùn)動(dòng)恢復(fù)結(jié)構(gòu)(Structure-from-Motion,SfM)方案的穩(wěn)健軟件工具。在此基礎(chǔ)上通過將預(yù)先建立的激光雷達(dá)地圖作為固定約束納入因子圖優(yōu)化過程中,來增強(qiáng)管線。這個(gè)包含有助于確保圖像的重建尺度與激光雷達(dá)地圖的尺度密切匹配,從而增強(qiáng)了注冊(cè)過程的準(zhǔn)確性。我們的方法使用自行收集的數(shù)據(jù)集進(jìn)行評(píng)估,結(jié)果清晰地展示了其在標(biāo)準(zhǔn)Colmap方法上的卓越性能。更具體地說,我們的方法產(chǎn)生了一個(gè)帶有準(zhǔn)確尺度的重建結(jié)果,超出了原始Colmap的能力范圍。總體而言,本文提出了三個(gè)重要貢獻(xiàn):
1)引入Colmap-PCD,一種圖像到點(diǎn)云配準(zhǔn)方案,通過使用激光雷達(dá)地圖優(yōu)化圖像定位。它產(chǎn)生具有準(zhǔn)確尺度信息的精確定位和重建結(jié)果,無需同步激光雷達(dá)和相機(jī)數(shù)據(jù)收集。
2)通過對(duì)自行收集的數(shù)據(jù)集進(jìn)行全面測(cè)試,展示了Colmap-PCD的有效性。
內(nèi)容概述
Colmap簡(jiǎn)要概述
對(duì)應(yīng)點(diǎn)搜索:對(duì)應(yīng)搜索過程包括特征提取和特征匹配,通過識(shí)別跨越各種輸入圖像的匹配2D特征點(diǎn)來確定潛在的場(chǎng)景重疊。為增強(qiáng)圖像匹配的可靠性,Colmap通過在不同的轉(zhuǎn)換條件下計(jì)算內(nèi)點(diǎn)數(shù)來選擇最可信的變換模型。?
初始化:選擇一個(gè)適當(dāng)?shù)膱D像對(duì)進(jìn)行初始重建,確保它與多個(gè)圖像共享足夠的共同觀測(cè)。然后,利用三角測(cè)量生成初始的3D重建點(diǎn)集。?
選擇并配準(zhǔn)下一張圖像:選擇一張與當(dāng)前模型具有更多共同可見點(diǎn)并具有更均勻分布模式的圖像作為下一張要配準(zhǔn)的圖像。通過PnP將圖像配準(zhǔn)到模型。?
三角化測(cè)量:對(duì)新圖像執(zhí)行三角測(cè)量,將新場(chǎng)景集成到現(xiàn)有的3D結(jié)構(gòu)中。由于噪聲,Colmap將單個(gè)3D點(diǎn)的特征軌跡視為一組測(cè)量,可以進(jìn)行配對(duì)。使用直接線性變換(DLT)方法計(jì)算配對(duì)測(cè)量的3D點(diǎn),通過RANSAC進(jìn)行遞歸采樣和調(diào)整采樣區(qū)域,獲得可靠的三角測(cè)量結(jié)果。?
增量捆集調(diào)整:在每次三角測(cè)量后,進(jìn)行局部捆集調(diào)整(BA)以調(diào)整新配準(zhǔn)圖像和其他共享更多共同觀測(cè)的已配準(zhǔn)圖像的參數(shù)和3D點(diǎn)位置。?
全局捆集調(diào)整:執(zhí)行全局捆集調(diào)整以計(jì)算所有已配準(zhǔn)圖像的最佳3D模型和參數(shù)。為節(jié)省時(shí)間,與先前的全局優(yōu)化相比,當(dāng)模型的體積增長(zhǎng)到一定程度時(shí)將進(jìn)行全局捆集調(diào)整(BA)。
Colmap-PCD算法
Colmap-PCD通過將從視覺圖像中重建的3D點(diǎn)與從LiDAR點(diǎn)云地圖中提取的平面匹配,旨在同時(shí)最小化重投影誤差和3D點(diǎn)與關(guān)聯(lián)LiDAR平面之間的距離。整個(gè)流程如圖2所示。
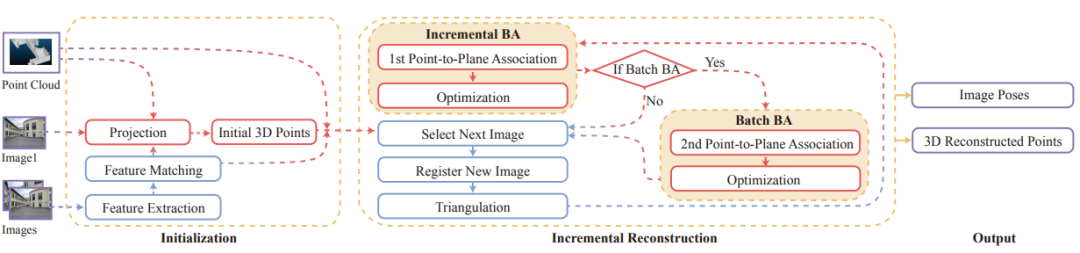
圖2:Colmap-PCD的流程,藍(lán)色框中的過程屬于原始Colmap,紅色框中的過程是與LiDAR相關(guān)的過程
投影
? 將LiDAR點(diǎn)云投影到已知的相機(jī)成像平面In。
??劃分LiDAR點(diǎn)云為固定大小的體素,通過四條線形成四邊形金字塔。
? 通過遍歷體素中的LiDAR點(diǎn),將其從世界坐標(biāo)系轉(zhuǎn)換到相機(jī)坐標(biāo)系,并投影到成像平面。
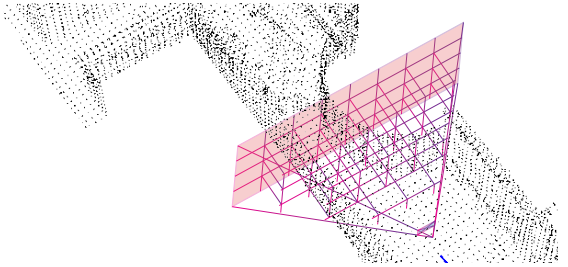
圖3:將LiDAR點(diǎn)投影到相機(jī)成像平面的四棱錐中,四棱錐的頂點(diǎn)代表相機(jī)中心。
點(diǎn)到平面關(guān)聯(lián)
? 將3D點(diǎn)與LiDAR點(diǎn)關(guān)聯(lián),使其盡可能與所屬的LiDAR平面匹配。
? 使用深度投影和最近鄰搜索兩種方法進(jìn)行點(diǎn)對(duì)平面關(guān)聯(lián)。
? 在深度投影中,通過計(jì)算角度選擇最小的LiDAR點(diǎn)作為相應(yīng)的LiDAR點(diǎn)。
? 最近鄰搜索方法用于所有點(diǎn)對(duì)平面關(guān)聯(lián)過程。
初始化
? 初始化圖像需要大致已知的相機(jī)位姿。
? 初始圖像和其位姿手動(dòng)設(shè)置,位姿不需要精確。
? 通過投影獲取初始2D特征點(diǎn)的相應(yīng)LiDAR點(diǎn),建立初始3D模型。
? 隨著圖像數(shù)量增加,初始3D模型逐漸收斂到正確狀態(tài)。
捆集調(diào)整
? 有增量束調(diào)整、批量束調(diào)整和整體地圖束調(diào)整三種類型。
? 在新圖像的三角測(cè)量后,執(zhí)行增量BA減輕累積誤差。
? 執(zhí)行批處理BA以節(jié)省時(shí)間,構(gòu)建包含相機(jī)位姿和3D點(diǎn)的3D模型。
? 整體地圖BA用于進(jìn)一步優(yōu)化整個(gè)模型,將2D特征、圖像位姿、3D點(diǎn)和LiDAR點(diǎn)添加到因子圖中進(jìn)行優(yōu)化。
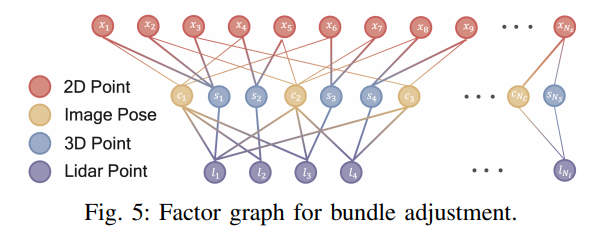
圖:用于捆集調(diào)整的因子圖
基于已知位姿的增量重建
如果通過一些傳感器(如GPS)的測(cè)量已經(jīng)知道了大致相機(jī)位姿,可以使用已知位姿開始增量重建。
實(shí)驗(yàn)
驗(yàn)證了Colmap-PCD的有效性和尺度準(zhǔn)確性。我們?cè)谛@收集了三個(gè)數(shù)據(jù)集,如圖7所示。每個(gè)數(shù)據(jù)集都有一個(gè)預(yù)建的LiDAR點(diǎn)云地圖、450張圖像和相應(yīng)的相機(jī)內(nèi)參。
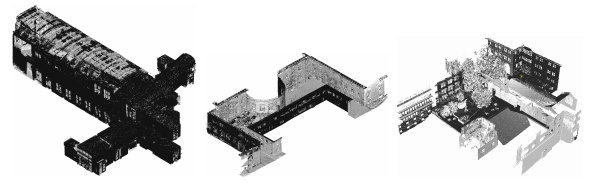
圖: 自行采集的點(diǎn)云地圖
定位結(jié)果
圖顯示了Colmap-PCD和原始Colmap的重建結(jié)果。左圖和中圖顯示了Colmap-PCD的重建結(jié)果。左圖包括LiDAR地圖和3D重建點(diǎn),而中圖只顯示了3D重建點(diǎn)。右圖顯示了Colmap的重建結(jié)果,包括LiDAR地圖和3D重建點(diǎn)。紅色的金字塔表示相機(jī)位姿。顯然,重建結(jié)果幾乎與LiDAR生成的地圖完美對(duì)齊,表明LiDAR點(diǎn)云地圖在圖像定位過程中提供了積極的約束。然而,原始Colmap的建圖尺度與實(shí)際環(huán)境顯著不同。
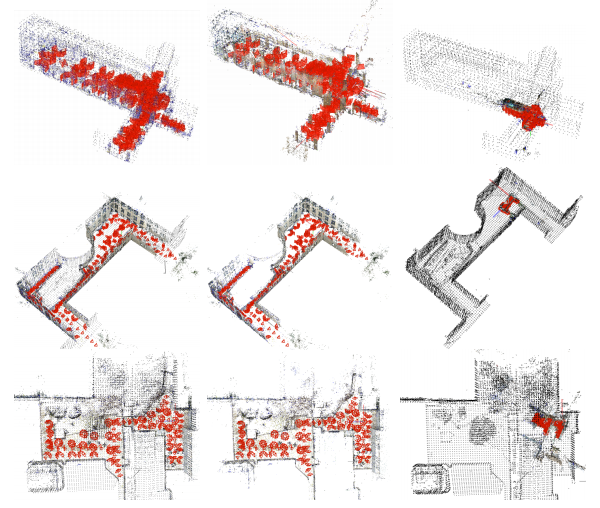
圖: Colmap-PCD和Colmap的重建結(jié)果
顯示了從圖像反投影到LiDAR點(diǎn)云的結(jié)果,顯然非常準(zhǔn)確。該結(jié)果表明Colmap-PCD能夠?qū)崿F(xiàn)對(duì)圖像定位所需的精度。?
LiDAR點(diǎn)對(duì)圖像定位的影響
第一個(gè)實(shí)驗(yàn)考察了可以用于改善姿態(tài)估計(jì)過程的LiDAR平面數(shù)量。通過點(diǎn)對(duì)平面關(guān)聯(lián)搜索平面。如圖所示,x軸表示解決的圖像位姿數(shù)量,y軸表示在單次迭代中利用的LiDAR平面計(jì)數(shù)。紫色線表示通過投影實(shí)現(xiàn)LiDAR平面與3D點(diǎn)之間的匹配,黃色線表示通過最近鄰搜索和投影成功關(guān)聯(lián)的LiDAR平面的總計(jì)數(shù)。可以觀察到大量LiDAR平面有助于圖像定位。
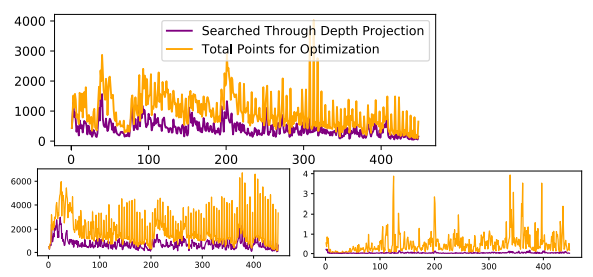
圖:增量捆集調(diào)整中使用的平面數(shù)量(室內(nèi),室外1,室外2)
第二個(gè)實(shí)驗(yàn)展示了每次局部束調(diào)整前后的點(diǎn)對(duì)平面距離的趨勢(shì)。如圖所示,距離在每次迭代后收斂到最小值,表明3D點(diǎn)能夠與點(diǎn)云地圖中的適當(dāng)位置很好地對(duì)齊。
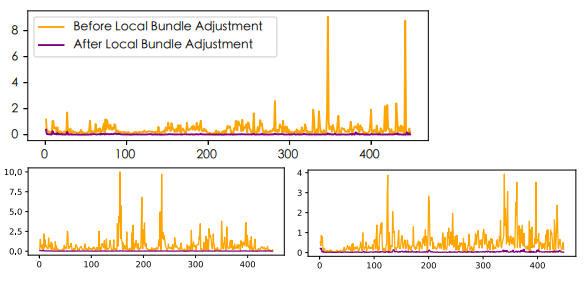
圖:3D點(diǎn)與相應(yīng)LiDAR平面之間的距離(室內(nèi),室外1,室外2)
重投影誤差分析?
這個(gè)實(shí)驗(yàn)展示了重投影誤差的變化。如圖12所示,紫色線表示平均重投影誤差,而黃色區(qū)域描繪了重投影誤差協(xié)方差的分布。
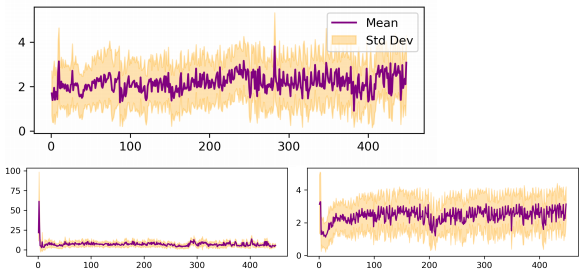
圖: 重投影誤差(室內(nèi),室外1,室外2)
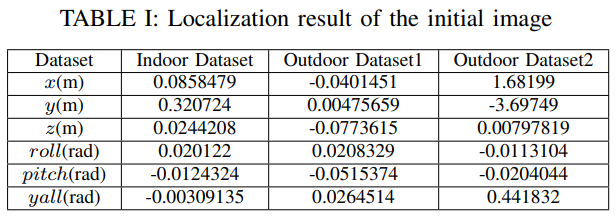
我們拍攝了靠近LiDAR地圖原點(diǎn)的第一張圖像,因此初始位置和方向被設(shè)置為0。如表I所示,初始圖像的最終定位結(jié)果表明,隨著圖像數(shù)量的增加,即使提供了相對(duì)較大的初始位置誤差,初始圖像的位姿也能逐漸收斂到正確的結(jié)果。
總結(jié)
本文介紹了一種方案通過將異步獲取的圖像與LiDAR點(diǎn)云對(duì)準(zhǔn),以獲得具有準(zhǔn)確比例的定位結(jié)果。通過對(duì)自行收集的數(shù)據(jù)集進(jìn)行實(shí)驗(yàn),該方法在圖像累積方面表現(xiàn)出一定的有效性和穩(wěn)定性。此外該方案允許在重建區(qū)域進(jìn)行靈活的細(xì)節(jié)級(jí)調(diào)整,使其適用于協(xié)作式大規(guī)模場(chǎng)景重建。總的來說,我們的算法為圖像定位和大規(guī)模場(chǎng)景重建任務(wù)做出了貢獻(xiàn),為該領(lǐng)域未來的研究提供了有價(jià)值的見解。
審核編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論