 電子發燒友App
電子發燒友App


硅基光電子技術的發展可以將激光雷達系統發射模塊和接收模塊中分立的有源和無源器件集成在芯片上,使激光雷達體積更小、穩定性更強、成本更低,推動激光雷達在自動駕駛等領域的應用。
據麥姆斯咨詢報道,針對該領域發展概況,西南技術物理研究所研究陳孝林團隊進行了綜述分析,包括激光雷達的基本概念和常見激光雷達的測距原理,分析了常見硅基片上激光雷達系統的掃描方案,并討論了硅基片上激光雷達當前面臨的挑戰和發展方向。相關研究內容以“硅基片上激光雷達技術綜述”為題發表在《激光與光電子學進展》期刊上。
激光雷達基本概念
激光波長
綜合考慮大氣窗口、人眼安全以及可選用的激光器和光電探測器,激光雷達使用的波長通常為0.8~1.55 μm,對應使用的激光器和探測器類型如表1所示。由于車載激光雷達工作時可能面臨的環境溫度具有很大的變化范圍,因此當系統中采用濾光片抑制背景光干擾時,激光器的輸出波長在溫度影響下發生變化時應始終保持在濾光片的通帶內,這也是在選擇光源時需要考慮的問題。
表1 激光雷達波長對應的激光器和探測器類型
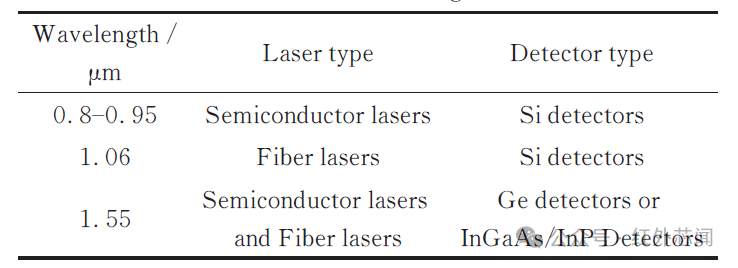
當前激光雷達的主流波長是905 nm和1550 nm。脈沖激光雷達采用905 nm激光器,主要優點是可以采用較為便宜的硅基探測器,并且905 nm相比1550 nm親水性較弱,光損失更小。但由于硅材料的透明窗口,它不能用在硅光子系統上。因為905 nm激光可以穿透人眼玻璃體到達敏感的視網膜,為避免視網膜損傷,它的峰值功率受到限制。1550 nm適用于長距離連續波激光雷達系統,由于光在人眼的前半部分被吸收,不會危害視網膜,激光出射功率可以更大。這一波長通常用于通信設備,具有豐富的技術儲備,并且可以以低成本獲得連續波激光源。
探測距離
探測距離指激光雷達能發現目標的最大距離,主要受到激光信號發射功率的制約。對于脈沖激光雷達,探測距離還與信號的重復周期T有關,因為只有當回波信號在時間T內返回接收系統時才可以解算出正確的目標距離信息,而超出這一時間段返回的回波信號則因為與后續回波無法區分而導致距離模糊。對于調頻連續波(FMCW)激光雷達,探測距離也受到激光線寬Δν的影響。Δν越窄,激光信號的相干長度Lc就越長,而對于相干長度以外的目標,其回波信噪比會大大降低而難以被系統識別。此參數一般由激光雷達對于10%低反射率目標物的最遠探測距離得到,實際應用中由于環境和目標表面情況的變化,數值并不是絕對的。
視場角
視場角(FOV)指激光雷達可以探測到的區域范圍,單位通常以°表示。對于車載環境應用,激光雷達視場角必須包括水平視場角(HFOV)和垂直視場角(VFOV),視場角越大說明激光雷達對空間的角度覆蓋范圍越廣,對周圍環境的感知范圍越大。
測量精度和測量分辨率
測量精度是精確度與準確度的結合。精確度指激光雷達在同一條件下多次測量得到的距離值的一致程度,而準確度指激光雷達測得的距離分布的均值與真實距離的接近程度,二者分別受測量過程中的隨機誤差和系統誤差影響,如圖1所示。其中,距離測量的準確度主要受光信號產生和測量系統影響,角度測量的準確度則主要受發射端激光轉向掃描的準確性影響。
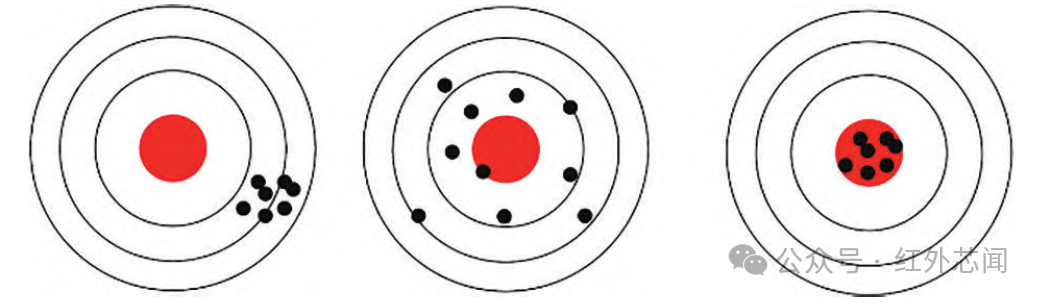
圖1 激光雷達精確度、準確度
測量分辨率具體包括距離分辨率和角分辨率。距離分辨率指激光雷達單次測量中目標能被區分的最小距離。對于脈沖激光雷達,脈沖寬度越窄則距離分辨率越高;對于FMCW激光雷達,距離分辨率與調制帶寬成反比,并受調頻線性度影響。角分辨率指激光雷達單次測量中目標能被區分的最小角度,增加發射孔徑是提高角分辨率的有效手段。
硅基片上激光雷達的測距原理
脈沖飛行時間法
脈沖飛行時間法(TOF)采用直接探測方式,通過測量激光信號從發出經目標反射到被探測系統采集的時間實現目標距離的測量。脈沖激光雷達的測距原理和系統設計都比較簡單,如圖2所示。
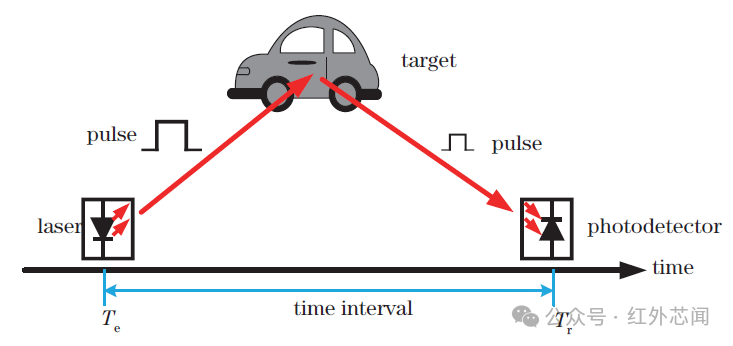
圖2 脈沖式激光雷達工作原理
脈沖激光雷達存在模糊距離,因為回波信號相對于發射信號是否偏移一個或多個周期存在著不確定性。此外,由于發射機到接收機的鏈路上光脈沖能量存在散射損耗,因此信噪比也是限制脈沖激光雷達探測范圍的主要因素。為了提高作用距離,需要增加脈沖發射功率,對于自動駕駛應用,需要考慮人眼安全功率極限。一種方法是使用脈沖串來降低單個脈沖所需的高功率,通過積分并平均接收的功率來提高信噪比和精度。盡管存在這些限制,脈沖激光雷達簡單的探測原理和實現方式使其具有強大的競爭力。
調幅連續波測距法
調幅連續波(AMCW)測距法也稱間接飛行時間法。在調幅連續波激光雷達中,激光出射之前進行了幅度調制,調制周期大于往返飛行時間,對回波信號和出射信號進行比較。對于調幅連續波測量方法,距離分辨率由測距信號頻率和相位計分辨率共同決定,距離分辨率隨著調幅信號頻率增加而增加。與脈沖激光雷達一樣,調幅連續波激光雷達的回波信號相位經過2π 相移后開始重復,為避免多解問題,測距范圍會相應減小。一種解決方法是選取一個調制頻率高的調制光波作為基本測尺,再引入一個或多個調制頻率較低的調制光波作為輔助測尺,綜合每個測尺的測量結果以獲得精確的測量值。
隨機調制連續波測距法
隨機調制連續波(RMCW)測距法將偽隨機比特序列(PRBS)調制到出射激光的幅度或相位上,通過使用匹配濾波器等方式計算接收到的返回激光信號與PRBS的原始模板之間的相關性來獲得接收光的飛行時間,如圖3所示。由于PRBS只與自身相關,因此RMCW激光雷達對陽光、燈光和其他激光雷達的光等不敏感。然而,此技術對相對速度、激光相位噪聲和散斑具有敏感性,這是較大的技術挑戰。在激光雷達應用領域,澳大利亞初創激光雷達公司Baraja是RMCW技術的典型代表,該公司采用RMCW技術結合獨特的棱鏡色散光譜掃描技術研制出型號為Spectrum HD的車載級雷達。
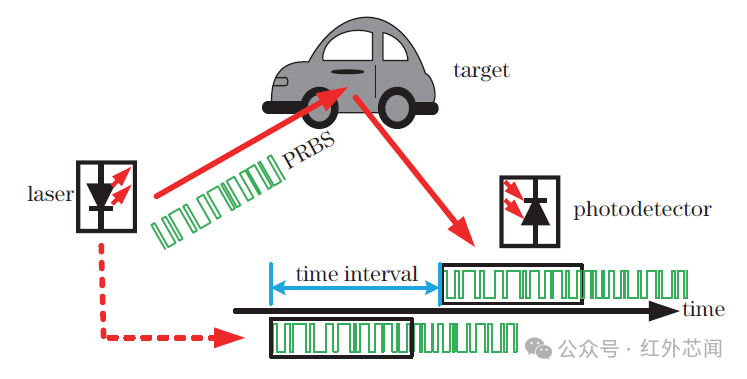
圖3 RMCW激光雷達系統示意圖
調頻連續波激光測距法
FMCW激光雷達采用頻率隨時間周期性變化的調制信號進行探測,返回的光信號與本振光信號相干,根據混頻產生的中頻信號的頻率可以測量目標物的距離,它的信號調制形式有三角波、鋸齒波、正弦波等。其中,正弦波調制信號檢測物體時需要調節信號頻偏,因此大多應用于只有一個探測目標的情況,對于自動駕駛應用中對多個目標的探測需求,一般采用三角波或者鋸齒波。三角波可以同時得到物體的距離和速度信息,鋸齒波則主要用來測量物體的距離。對于三角波探測,當目標運動時,信號發生多普勒頻移,反射信號和本振信號之間的頻率差在線性調頻的上升段和下降段具有不同的拍頻頻率,如圖4所示。
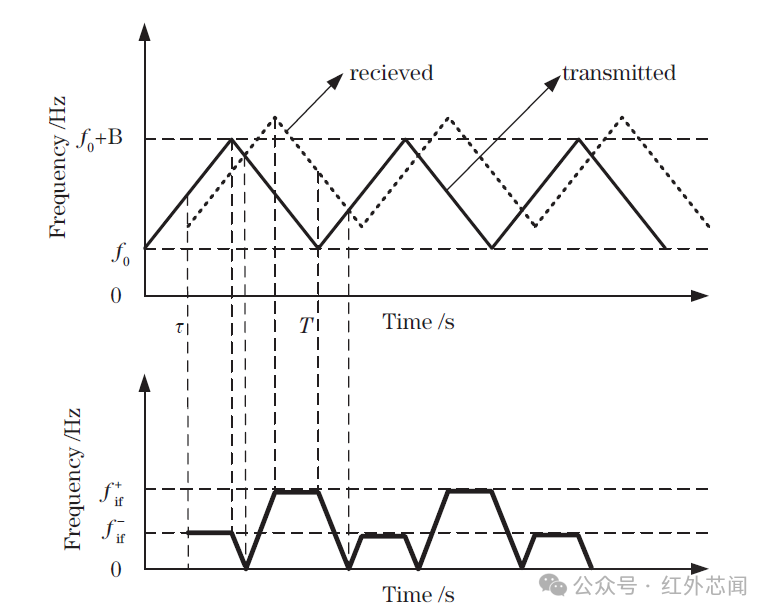
圖4 FMCW激光雷達測量原理
與脈沖測距法相比,FMCW測距具有許多優勢。第一,它采用相干探測,不受陽光、城市人造光及附近的其他激光雷達系統的干擾,提高了信噪比。第二,它可以通過檢測信號的多普勒頻移來直接獲取目標的運動速度。第三,它的探測精度取決于線性調頻帶寬和信噪比,可以通過相對低頻的接收器電子設備實現,相比之下脈沖測距精度受到接收器帶寬的限制。第四,它的檢測靈敏度高,不需要很高的激光功率,因此也不會在波導中產生非線性效應,加上它不需要用到雪崩光電二極管(APD)和高速檢測電路,所以適應激光雷達的硅基集成化發展。它的主要技術難點在于線性調頻光信號的獲取,解決方法有采用干涉儀、光頻梳、微諧振器等校準掃頻激光器,或者在外部級聯光調制器等。
硅基片上激光雷達的掃描實現方式
面陣閃光激光雷達
flash脈沖激光雷達的工作模式類似于照相機,它基于TOF原理,系統發射具有高重復頻率的脈沖光束,脈沖光束完全照亮整個視場。由于空間中存在目標物,探測器陣列中每個單元獲取的光子具有不同的飛行時間,據此可以獲得距離信息,實現三維成像。荷蘭代爾夫特理工大學演示了一種flash激光雷達。圖5a給出了該雷達系統使用的單光子雪崩二極管(SPAD)芯片,它采用0.18 μm CMOS工藝制造,尺寸為21.6 mm × 10.2 mm,具有252 pixel × 144 pixel和1728個12位時間數字轉換器(TDC),其上約70%的面積為部分直方圖讀出電路(PHR),作用是將原始數據處理為直方圖數據輸出,壓縮輸出的數據量。芬蘭奧盧大學提出的flash激光雷達系統采用了基于塊的分段照明策略,如圖5b所示。西安電子科技大學采用0.18 μm HV CMOS工藝制造了2.9 mm × 2.9 mm的flash脈沖激光雷達芯片,如圖5c所示。該團隊利用基于此芯片的激光雷達系統成功演示了4.5 m處的室內3D成像,在超過20 m的室外測距實驗中,相對測量誤差不超過0.35%,如圖5d所示。
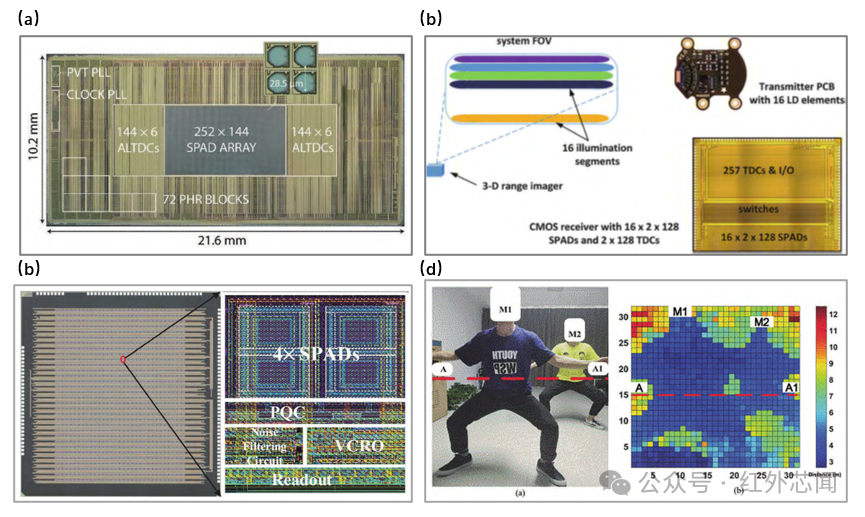
圖5 flash脈沖激光雷達樣例
flash激光雷達的系統中沒有運動部件,具有抗振動、體積小、價格低等優點。其點云是由單次激光脈沖生成的,而非逐點構建,因此可以解決時間同步問題。其缺點是需要較高的激光峰值功率以同時照亮大的空間區域,信噪比低,檢測距離和視場有限,性能還會受到目標物反射率的影響。由于雷達的距離分辨力率和角分辨率直接受限于探測器陣列的規模和性能,而大規模陣列意味著大數據處理量,因此成像分辨率和成像速度之間需要進行平衡。此外,從目標表面反射的回波信號往往很弱,探測器往往需要采用昂貴的SPAD。
光學相控陣激光雷達
OPA中主要包括分光器、移相器和天線等3個部分。其中,移相器為光信號引入相位延遲,主要通過熱光效應或電光效應實現,天線通常采用光柵耦合器、邊緣耦合器或端射耦合器的形式。OPA通過控制光通過微波導的相位,從而控制波前的形狀和方向,實現光束偏轉。
2017年麻省理工學院電子研究實驗室首次在硅光子芯片上展示了采用三角波調制的FMCW激光雷達,如圖6所示。美國Analog Photonics公司展示了相干二維固態激光雷達原型系統,其中使用了兩個大型OPA,首次展示了使用OPA實現的實時3D相干激光雷達系統,獲取的圖像如圖7所示,其中,清晰地展示了7 m外站立的人的手臂和腿部等特征。
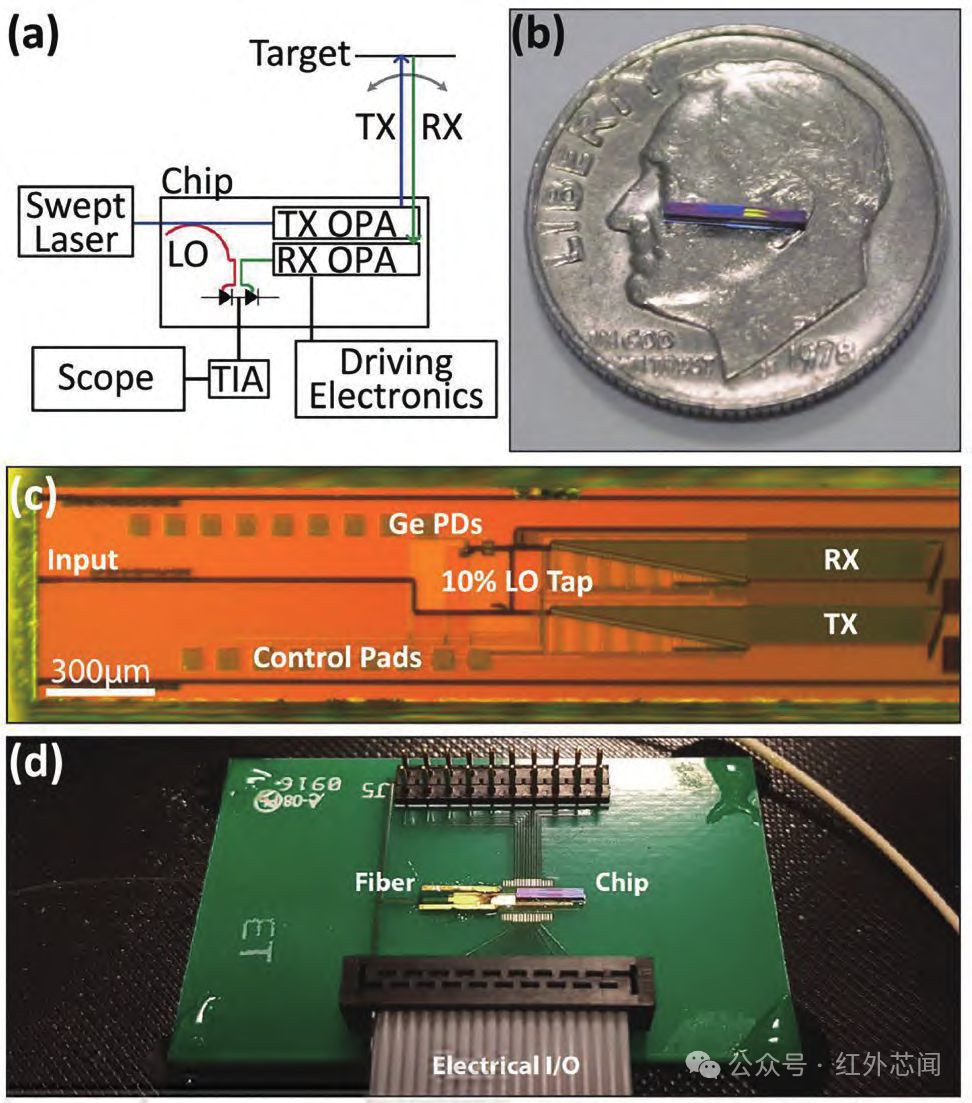
圖6 FMCW激光雷達系統
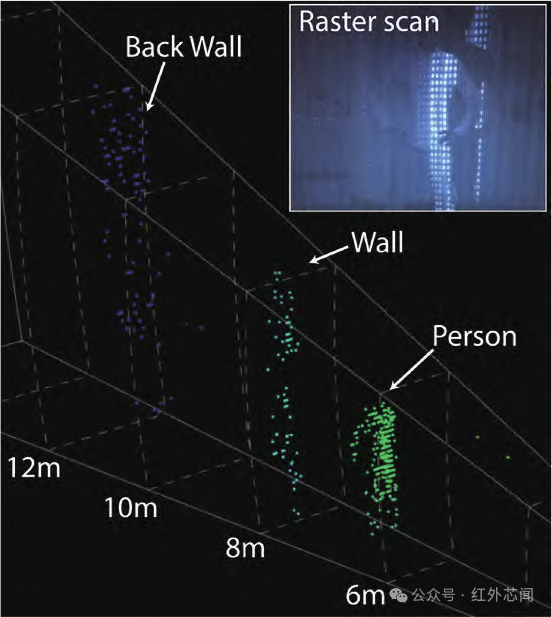
圖7 來自基于光柵掃描的OPA的3D LiDAR系統的實時數據,插圖顯示被光柵掃描的場景
三星電子于2020年展示了帶有集成半導體光放大器(SOA)的32通道硅光子OPA。該公司還首次展示了不使用外部光源或放大器的芯片級激光雷達解決方案,如圖8A所示。2021年,三星電子通過III-V-on-Si工藝將可調諧激光二極管、SOA和32通道的OPA集成在8.7 mm × 3 mm單芯片上,如圖8B所示。吉林大學在多層SiN-SOI平臺上制造了分別具有魚骨結構和鏈式結構的兩個128通道OPA,其圖像如圖8C所示。
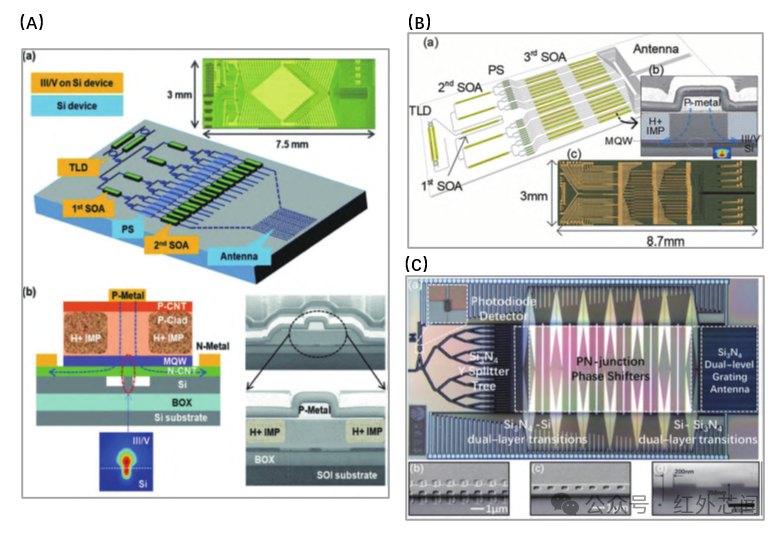
圖8 OPA樣例
OPA結構緊湊,制造成本低,對于機械沖擊和振動不敏感,因為沒有運動部件而完全沒有慣性,且任意時刻的掃描方向只由當前調用的相位查找表決定,與前一時刻的掃描方向無關,在高速掃描下可以實現具有高方向增益的隨機指向。由于陣列中的所有光學天線需要進行精確的幅度和相位控制,擴大OPA的制造規模比較困難。目前大多數能做到寬視野的大規模OPA只是一維陣列,另一個方向的掃描通常通過調諧激光器的波長實現。此外OPA還面臨著較高的光損耗、陣列串擾、熱穩定性等挑戰,它較低的片上光功率也會限制遠距離探測。從廣義上來說,液晶超表面(LCM)技術也屬于特殊的OPA,該技術使用液晶來調整超表面以創建可以快速更改的反射光柵改變衍射角,由于技術尚在發展中,所以信息量有限。
透鏡輔助光束轉向激光雷達
透鏡輔助光束轉向(LABS)技術具有類似相機的光學系統,包括片上開關/天線陣列和片上(或片外)透鏡,陣列位置與透鏡的焦平面重合,所以也可稱為基于焦平面陣列(FPA)的光束轉向技術。陣列中采用的開關通常為Mach-Zehnder(MZ)干涉儀開關、MEMS開關和環形諧振器開關。通過打開特定的開關,入射光被引導到相應的天線進行準直,經透鏡出射發生規定的角度偏轉,進入自由空間。在這一技術中,每次只有一個發射器發射一束光,通過將光束切換到不同的發射器來控制光束的發射角度,光束的掃描是離散的。
2020年上海交通大學演示了基于LABS的固態脈沖激光雷達,如圖9A所示。該團隊此后還在單個片上二維收發器陣列芯片上同時實現了光束發射、轉向和接收,如圖9B(a)所示。美國加州大學伯克利分校開發出一種新型高分辨率芯片激光雷達,它采用基于MEMS工藝的128 pixel × 128 pixel的焦平面開關陣列(FPSA),并將其集成在尺寸為10 mm × 11 mm的硅光子芯片上,如圖10所示。2021年來自美國的Pointcloud Inc.和英國南安普敦大學光電研究中心的研究團隊展示了基于FPA的全固態集成光子激光雷達,圖11(a)展示了此系統的示意圖。
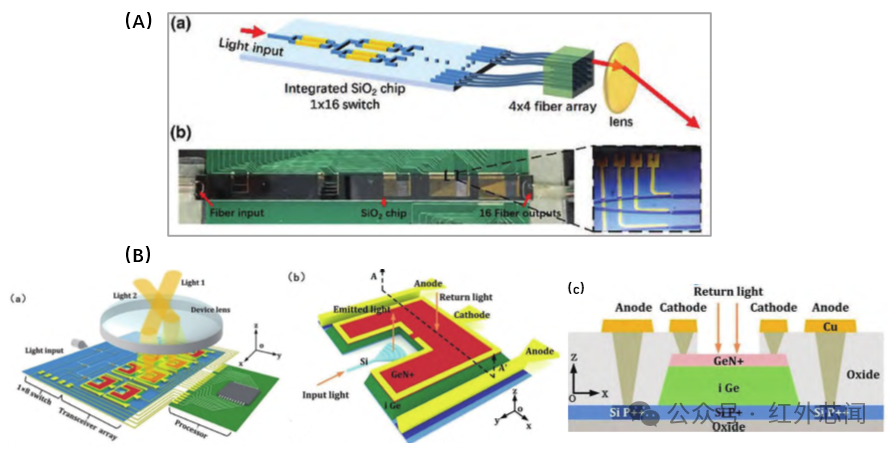
圖9 LABS技術
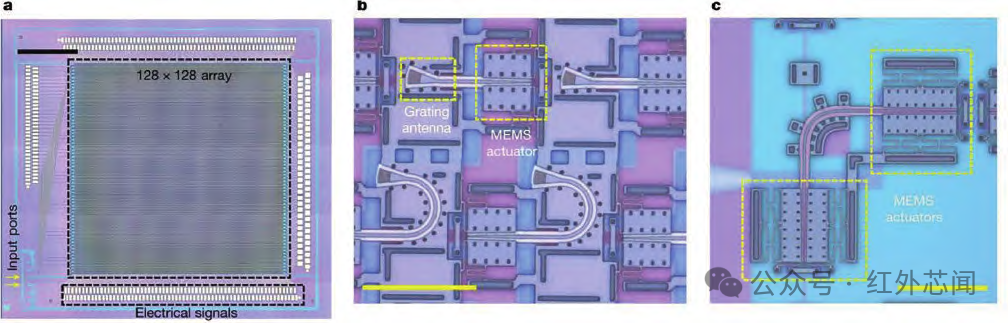
圖10 FPSA器件的顯微圖像
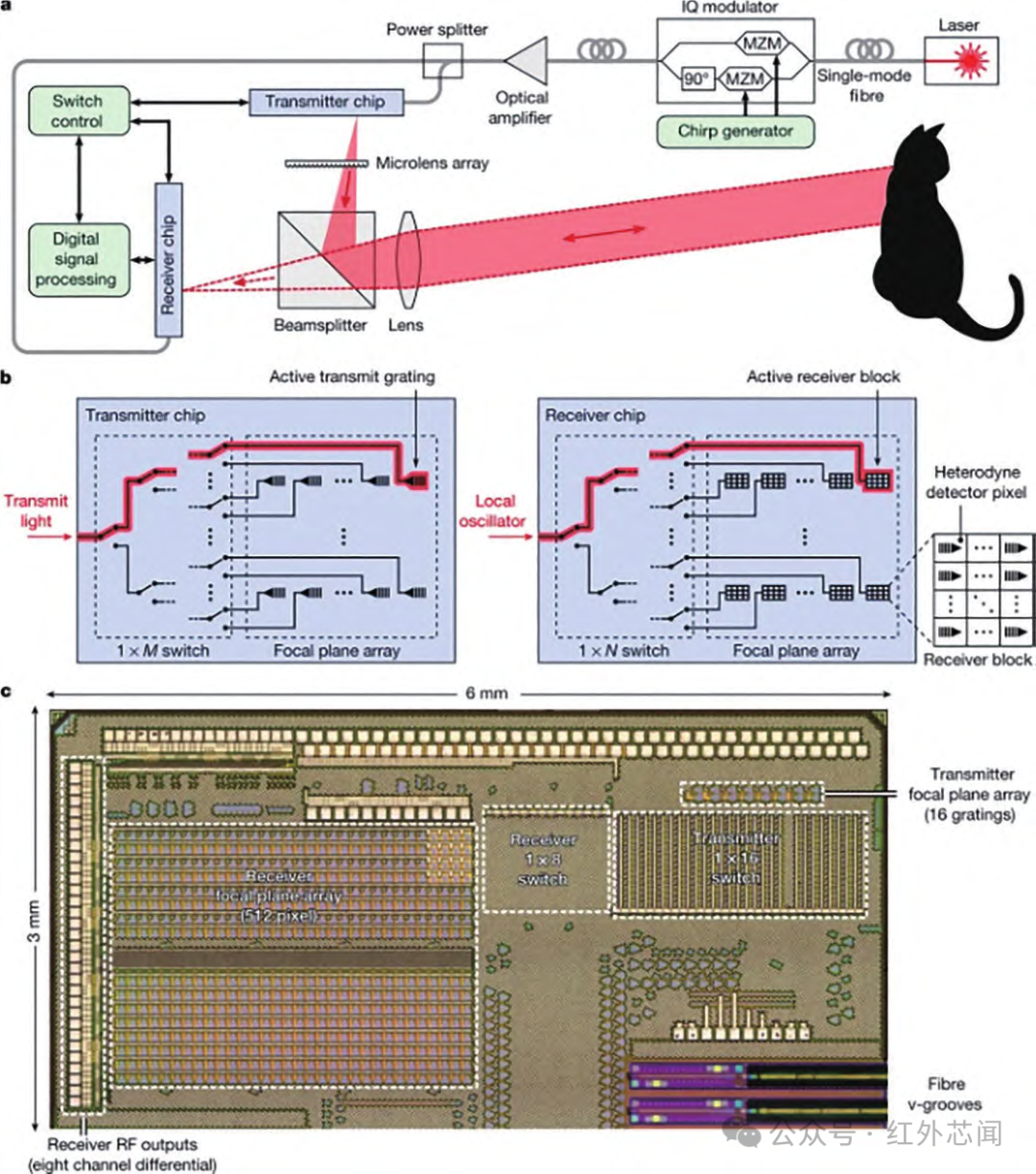
圖11 固態三維成像激光雷達
LABS技術可以實現快速隨機掃描,它最突出的優點在于只需要對二進制開關進行控制,控制簡單,制造成本低。此外,它的天線布置靈活,允許更大的像素密度,還可以實現二維轉向。由于開關和光束角度的對應關系,為了獲得高分辨率圖像,開關的數量也要盡可能地增加,同時也需考慮透鏡像差帶來的光束畸變問題。當光束轉向步長角太大時,位于兩束光之間的小目標會被遺漏,使系統存在盲區。
慢光光柵激光雷達
慢光光柵(SLG)以自由空間光束的形式發射導模,通過改變波長或波導折射率進行控制。2022年日本橫濱國立大學將SLG與Ge光電二極管相結合,在芯片上構建了基于零差探測的FMCW激光雷達系統,系統外觀如圖12所示。
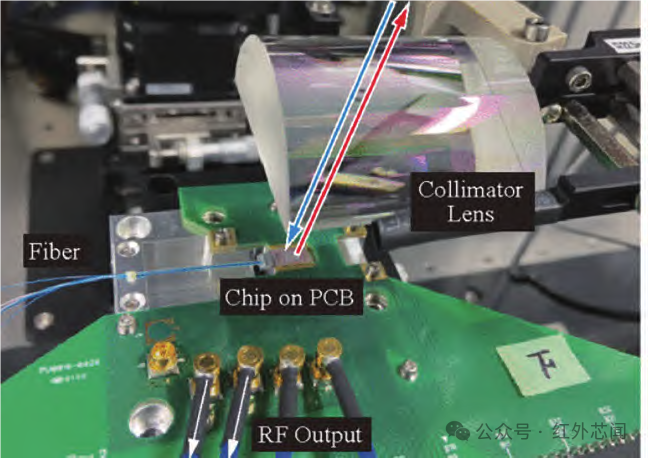
圖12 FMCW激光雷達芯片
由于慢光效應,SLG的光束角相比通常的波導光柵對波長和折射率更加敏感。與OPA和FPA相比,SLG減輕了光學天線的大規模集成和相位校準的負擔,同時通過固定激光波長的熱光效應可以實現大范圍和高分辨率的光束掃描。不足的是,由于該技術利用了熱光效應,結構邊緣的溫度不均勻性會干擾光束角度,加熱的效率也會制約掃描速率,且整個系統可能需要引入額外的溫控系統以控制外界溫度的干擾。此外,該技術對刻蝕均勻性的要求也較高。由于研究尚處于起步階段,該技術的光學損耗和噪聲較大,檢測距離有限,其實用性還需進一步的研究來證明。
其他激光雷達
當激光雷達只有固定角度的測距需求時,系統因為無需光束轉向機構而可以大大簡化。例如法國泰雷茲集團展示的基于硅光子平臺的FMCW激光雷達,如圖13所示。
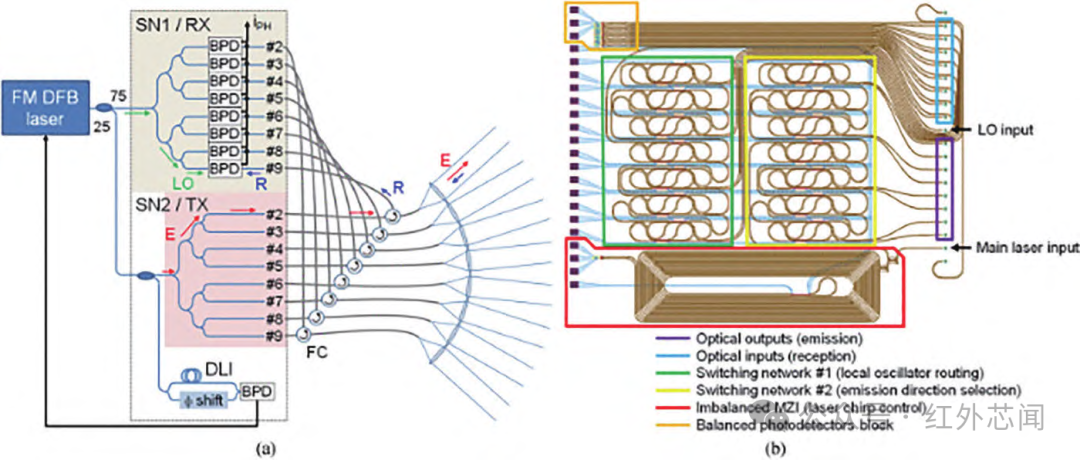
圖13 基于硅光子平臺的FMCW激光雷達
與LABS技術類似,這種結構可以實現快速隨機掃描,并且結構靈活,制造成本低,同時也存在盲區問題。此外,該結構對輸出端環形器和準直器的需求使得系統連線復雜,沒有完全發揮出硅基系統的優勢。
總結與展望
憑借著精度高、抗干擾能力強等優點,激光雷達成為了車輛感知系統的重要配置,在無人駕駛領域具有廣闊的應用前景。面對車載激光雷達極具潛力的商用市場,傳統掃描型激光雷達在成本和可靠性等方面難以突破現有的瓶頸,而固態激光雷達卻有著強大的發展潛力,MobileEYE、AEVA和速騰聚創等國內外廠商紛紛投入產品研發或布局相關產業。
歷經多年發展,硅基光電子技術無論在材料、設備或是加工制造、封裝測試等各個方面都積累了大量成熟的技術,是激光雷達理想的集成平臺。本綜述立足于硅基片上激光雷達固態掃描方案,重點介紹了flash、OPA、LABS和SLG這4種技術近5年的研究進展,并對它們的技術特點進行了總結。就未來的市場應用而言,flash激光雷達結構簡單,發展較成熟,目前已有LeddarTech Pixell等產品出現,但因為探測距離及精度有限,主要用于低速和精度要求較低的應用場景,還難以作為汽車的主雷達使用。OPA體積緊湊,掃描速度快,具有低成本量產的可行性,也很適合與FPA或衍射光柵結合而實現二維光束轉向,是當前的研究主流。雖然目前的產業鏈仍不成熟,實際產品制造存在較大的技術難點,短期內難以實現量產,但Quanergy的S系列產品也已經在推進產品化進程。相比之下,LABS技術和SLG技術發展較晚,缺少技術累積與實用性證明,目前還停留在研究階段,距離商品化還有很長的路要走。
對于整個激光雷達系統來說,目前除掃描系統以外,激光源、調制模塊、放大器及光電探測器等其余一些組件也已經有了芯片化成果,但分立的芯片器件之間仍需要通過光纖或空間耦合,功耗、體積和穩定性等問題依然存在。但隨著研究者們對異構集成平臺的開發,可以預見,未來的硅基芯片上將可以集成激光雷達系統中所需的各個有源和無源器件,使激光雷達完全實現芯片化,從而提高系統工作的穩定性,簡化制造和安裝流程,大大降低其體積和生產成本,最終提升激光雷達在無人駕駛等領域的競爭力。
審核編輯:黃飛


















 工商網監
工商網監
評論