 電子發燒友App
電子發燒友App


歷史不成熟的經驗表明:技術路線的收斂,往往是新技術大規模落地的標志。按照這種經驗審視自動駕駛技術,會遺憾地得出自動駕駛落地還遙遙無期的悲觀結論,畢竟自動駕駛一是不缺自信、二不缺技術路線之爭。
技術路線之爭往大了看有單車智能和車路協同之爭、有純視覺和多傳感器融合之爭、有依賴高精地圖和不依賴高精地圖之爭……,往小了看有激光雷達布置位置之爭、有行泊一體和分立之爭……
在所有技術路線之爭中,如果要挑一個我心中最有意思和最熱鬧的,非激光雷達莫屬,不信你看:
(1)測距方法有飛行時間(Time of Fly,ToF)法和調頻連續波(Frequency Modulated Continuous Wave,FMCW)法之爭;
(2)激光器有邊緣發射激光器(Edge Emitting Laser,EEL)和垂直腔面發射激光器(Vertical Cavity Surface Emitting Laser,VSCEL)之爭;
(3)激光波長有905nm和1550nm之爭;
(4)探測器有雪崩光電二極管(Avalanche photodiode,APD)、單光子雪崩二極管(Single photon avalanche diode,SPAD)、硅光電二極管(Silicon photomultipliers, SiPMs)之爭;
(5)掃描模塊有機械式、混合固態、固態之爭;混合固態又有棱鏡、轉鏡和微機電系統(Micro-Electro-Mechanical System,MEMS)微振鏡之爭,固態有光學相控陣(Optical Phased Array,OPA)和Flash之爭。
如果單純地將不同技術路線進行排列組合,理論上可以有上百種組合,如圖1所示,這也意味著將有上百種類型激光雷達。
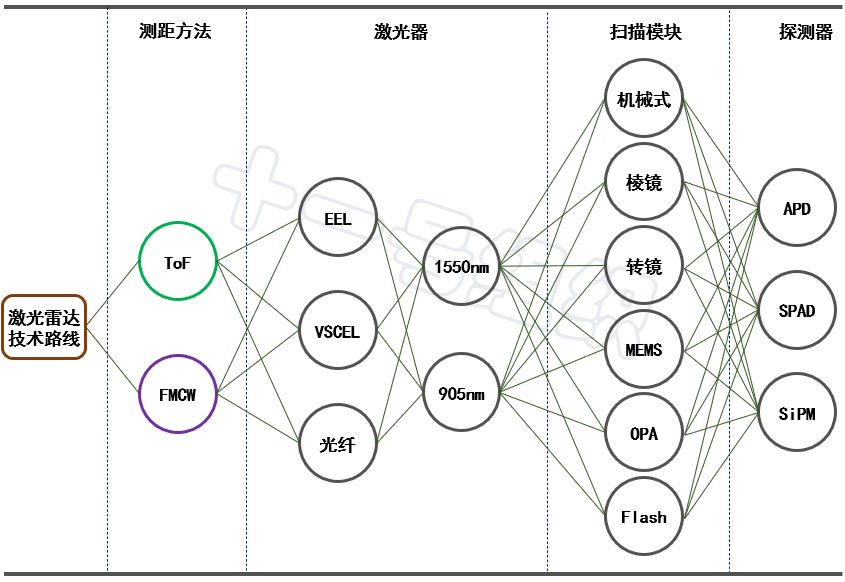
圖1 激光雷達紛繁復雜的技術路線組合
但很明顯,圖1中不是所有連線都具有可行性。而本系列科普文章,就是想講明白哪些技術路線不合理,哪些技術路線是已經被淘汰,哪些技術路線正在被廣泛使用,哪些技術路線是未來的發展方向。
在大規模枯燥的科普知識之前,第一篇就讓我們從緊張刺激而又跌宕起伏的激光雷達發展歷史講起。
01 跌宕起伏的歷史
早在二十世紀六十年代,休斯實驗室的Maiman和Lamb就研制出了可以發出694.3nm紅色激光的紅寶石激光器,這是公認的世界上第一臺激光器。為什么叫紅寶石呢,因為該激光器的工作物質就是摻有鉻和鋁的紅寶石。
此后隨著激光技術的發展,使用激光進行探測的激光雷達也得到發展,不過那時還主要用于科研領域,比如用于氣象探測,比如用于對海洋、森林、地表的地形測繪,和一般人還沒什么交集。
到了二十世紀八十年代,激光雷達引入了掃描結構,視場角增大之后也讓其在部分商用領域找到了立足之地,比如工業測量,著名的Sick(西克)及 Hokuyo(北洋)公司針對此領域推出的掃描式2D激光雷達便是其中的優秀代表。
2000年以后,激光雷達由單線掃描又進化到多線掃描,并逐漸在環境三維高精度重建應用上展露出一些優勢。
2004年,這是激光雷達種子在自動駕駛領域種下的年份,美國第一屆無人車挑戰賽在“別人恐懼我貪婪”的DARPA資助下如期舉行,參賽隊伍里有一家名叫Velodyne的公司,這是一個生產音響設備的公司,創始人為David Hall博士。
據說Velodyne參加比賽是為了推銷自家的音響產品,不信你看它的隊名DAD(Digital Audio Drive,數字音頻驅動),不看解釋我還以為他叫“爹地隊”,是我膚淺了。Veloyne參加比賽的車輛是一輛被改裝了的帶有全景攝像頭的皮卡,如圖2所示。
Velodyne雖然最后沒有完成比賽,但David Hall博士在比賽中發現了一個新奇的玩意:單線激光雷達,得知這個玩意的工作原理之后,David Hall博士隨機感受到這玩意的巨大魅力,同時也看到了單線激光雷達的局限性,比完賽回來之后馬不停蹄地就投入到激光雷達的研究中。
2005年,第二屆無人車挑戰賽上,Velodyne在參賽車輛上裝了一個自家發明的360°多線束旋轉式激光雷達,這臺激光雷達直徑達30英寸,重達100磅,實實在在的一個大家伙,“花盆”的外號也因此由來。
雖然依舊沒有完成比賽,但這顆車頂的激光雷達引起了其他隊伍的濃厚興趣。比賽之后,Velodyne繼續與這些參賽隊伍保持聯系,并基于這些需求不斷優化自己的激光雷達產品。
2007年,第三屆無人車挑戰賽移步城市舉行,Velodyne雖然沒有參加比賽,但是在7支跑完了全程的隊伍中,有6支搭載了Velodyne的64線束激光雷達HDL-64,Velodyne激光雷達自此一戰成名。
比賽結束后,版權保護意思強烈的David Hall博士隨即將這項新發明申請了專利,并授權給了Velodyne公司,專利號為US7969558(High definition LiDAR System),業內稱為“558專利”。
2011年6月,該專利又獲得美國專利審判和上訴委員會(Patent Trial and Appeal Board,PTAB)的授權,這意味著“558專利”成為機械旋轉式激光雷達的基礎專利,成為其他研發機械旋轉式激光雷達繞不過去的坎,這也成為后續眾多江湖恩怨的起源。
繼續回到DARPA資助的無人車挑戰賽上,當時低調亮相的另外一家激光雷達鼻祖便是Ibeo。1998年成立的Ibeo,2年后被SICK收購。第三屆DARPA資助的無人車挑戰賽上,Ibeo都有給部分參賽隊伍提供單線掃描式激光雷達。
尤其是在2005年第二屆無人車挑戰賽上,斯坦福團隊通過在感知方案中加入5個Ibeo激光雷達,成功在那一年的挑戰賽中脫穎而出,參賽車輛如圖3所示。我有點理解Velodyne的David Hall博士為什么要做多線激光雷達了,5個單線激光雷達并排放著確實有點壯觀。
2009年是兩家激光雷達鼻祖光輝歲月的開年。
這一年,Ibeo從SICK重新獲得獨立運營權,好運也隨之到來。2010年,獲得了法雷奧的青睞,雙方將合作共同為奧迪L3自動駕駛項目開發車載激光雷達,項目總額達到10億美金。
這一年,Velodyne推出64線旋轉式激光雷達的改進版HDL-64E,隨著投入到無人駕駛領域研究的公司越來越多,HDL-64E可謂一機難求,遍尋宇宙無敵手,8萬美金一顆的價值就正面說明了市場的火爆,圖4為搭載在Voyage車上的HDL-64E。
2009年之后,Velodyne在自動駕駛領域叱咤風云、為虎作倀,Ibeo在乘用車前裝量產領域嘔心瀝血、潛心打磨。
花開兩朵,各表一枝,先來說說Ibeo。
經過7年研發和量產打磨,2017年,其為奧迪A8打造的全球第一款車規級激光雷達SCALA量產交付,該款4線激光雷達掃描系統采用一維轉鏡方案,水平視場角達到了145°,測距達到了150m,圖5為搭載SCALA奧迪A8。本以為這將是Ibeo的騰飛時刻,未曾想,奧迪臨門剎車,叫停了帶L3自動駕駛功能的A8量產。
雖然遭受了客戶奧迪的爽約,合作伙伴法雷奧的移情別戀,Ibeo非但沒有就此沉淪,反而極大激發了自己的斗志,特別是在采埃孚入股Ibeo之后,更是開足馬力投入了固態激光雷達的研發中,以期證明自己,這種對技術的執著實在是令人欽佩。
這種執著在2019年換來了回報,前腳剛一口氣發布了短、中、長距三款純固態激光雷達產品ibeoNEXT,后腳就被東方大國神秘的客戶長城汽車看中,隨機宣布與其達成戰略合作,ibeoNEXT將搭載在長城魏牌系列車型,并定于2021年投產。
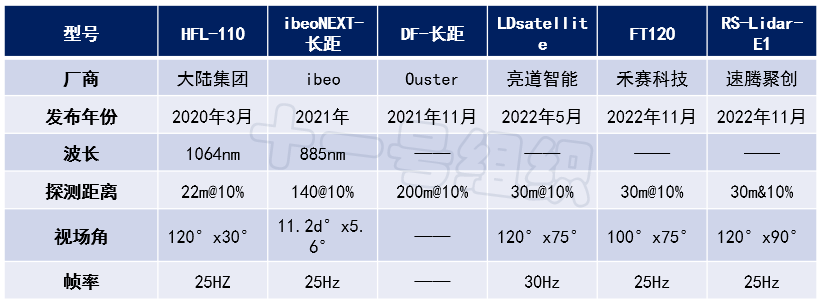
ibeoNEXT長距產品采用885nm波長激光器,擁有11.2°x5.6°的視場角,140m的探測能力。這個參數屬實有點尷尬,目前主機廠對主激光雷達的視場角要求一般是120°x25°,所以要用ibeoNEXT長距款作為主激光,需要11個拼起來……,造型上得有多丑,造型設計部門得有多頭大。
難怪有業內專家說:落地是不可能的,只是一個噱頭。所以這個合作的結局早已注定,只是沒想到這么悲壯。
計劃搭載IbeoNEXT的長城魏牌摩卡車型經歷了延遲、延遲、再延遲……。2022年8月,成都車展上,長城魏牌終于官宣了旗下首款激光雷達車型:摩卡DHT-PHEV激光雷達版,但為其站臺的激光雷達廠商卻不是Ibeo,而換成了速騰聚創。2022年9月,我們也沒有等來ibeoNEXT量產的喜訊,卻等來Ibeo破產的消息。
一代激光雷達佳人消香玉損,世人在評價她時,總是指責其在技術上步子賣的太大,融資和客戶上又不夠用心。但我總覺得這符合西方創業公司的傳統,認準一項技術,死磕,壟斷世界、驚艷世人。
Ibeo只是破產,又不是原地毀滅,這個時候說不定哪家公司正在繼承Ibeo的衣缽,正在潛心研究固態激光雷達,以期一鳴驚人。
到了另一朵花,Velodyne。
2009年之后,自動駕駛賽道的火熱將Velodyne推上激光雷達鐵王座,雖然8萬美金一顆、雖然售后服務幾近于無,雖然供貨周期漫長,但奈何市場別無其他激光雷達可選。2016年,為了能夠享受到優先提貨權,福特和百度更是向Velodyne激光雷達公司聯合投資了1.5億美元。
時人常戲稱:能有多少自動駕駛車輛上路,就看Velodyne能生產多少激光雷達。
這種躺贏的局面持續到了2017年,如果從2007年第三屆無人車挑戰賽算起,整整躺贏了10年。后面的故事大家就比較熟悉一點,以禾賽科技和速騰聚創為首的國內激光雷達廠商開始入局,其產品以極高的性價比、貼心的售后服務及極友善的交付周期迅速圈粉無數。
2019年8月,感受到國內廠商威脅的Velodyne祭起了大殺器“558專利”,在美國加州起訴了禾賽科技和速騰聚創兩家中國公司侵權。
剛發起專利訴訟沒多久,2019年底,想要將主要精力放在歐美市場的Veodyne突然決定不直接在中國市場銷售激光雷達,而是通過代理模式發展,同時裁掉了大部分在中國的工作人員。未曾想,戰略放棄的中國市場在兩年后成為激光雷達最核心的戰場。
2020年6月和9月,禾賽科技和速騰聚創先后跟Velodyne達成了和解,并簽署了專利許可協議。兩家公司同意向Velodyne支付和解費用,包括一次性的專利許可補償及后續按年支付的專利許可使用費。
之后的兩年,用內憂外患形容Velodyne毫不為過,曾經引以為傲的機械式激光雷達市場迅速縮水,2020年推出的混合固態激光雷達又沒激起水花。覆巢之下安有完卵,2021年,David Hall博士和其妻子因“表現不當且缺乏誠信”被罷免職務。
終局就是2023年開年,Velodyne宣布與Ouster公司合并,合并后公司仍以Ouster命名,股票代碼也是OUST,一代激光雷達巨頭,真的是揮一揮衣袖,不帶走一個名字。
在激光雷達的發展史上,還有許多發揮重要作用的人物和公司,在此我們就不展開敘述,只是通過Velodyne和Ibeo兩家公司波瀾壯闊的發展歷史來回顧激光雷達的青蔥歲月。
02 激光器之爭
在激光雷達名稱的四個字中,激光占據了一半的分量,這足以說明其“家庭地位”。
究竟什么是激光、發射激光的激光器有哪些類型,激光器有哪些重要的參數,本文期望能夠說清一二。
一、激光的誕生
激光Laser的英文全稱為Light Amplification by Stimulated Emission of Radiation,直譯過來就是受激輻射光放大,聽起來有點別扭,但其實精確表達了激光產生的原理,而要講清這個原理,就不得不從物資原子結構聊起。
19世紀末,科學家通過一系列粒子撞擊試驗后發現:原子是由原子核和繞核運動的電子組成,電子圍繞原子核不停地旋轉,同時原子核也不停地自轉,原子核內部還可以細分為質子和中子,原子內部結構如圖6所示。
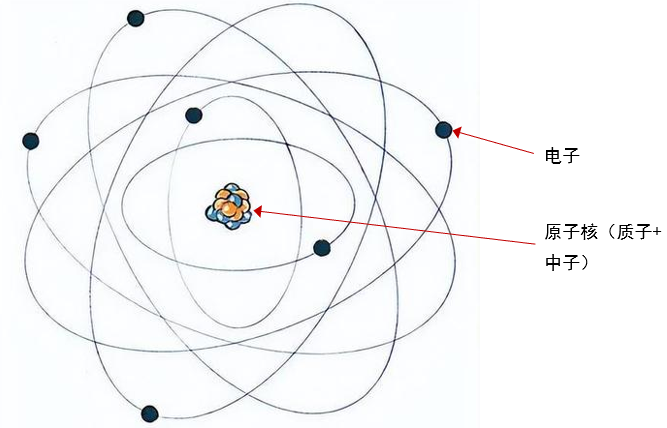
圖6 原子內部結構
1913年,年僅28歲的丹麥物理學家波爾(Niels Bohr)在借鑒了普朗克(Max Planck)的量子理論基礎上提出了全新的原子結構模型,其基本假設主要包括:
(1)定態假設:電子在原子核庫侖力作用下,只會在一些分立的特定圓形軌道運動,且不向外輻射光子,處于穩定的狀態,這種狀態被稱為定態。
注:光子(Photon)是一種基本粒子,是電磁輻射的量子,其靜止質量為零,不帶電荷,其能量E為普朗克常h和電磁輻射頻率f的乘積:E=hf,在真空中以光速運行。
(2)軌道假設:電子在不同的軌道上運動,能量是不同的,能量相對較高的為高能態,相對較低的為低能態。當電子處于離核最近的軌道上時,能量最低,稱為基態,當電子處于其他軌道上時,都比基態能量高,稱為激發態。
(3)躍遷假設:在不同定態之間躍遷,會輻射或吸收一定頻率的光子,輻射或吸收光子的能量由這兩個定態的能量差決定。
原子中處于高能態的電子,在沒有任何外界光子作用下,有一定概率會自發地從高能態向低能態躍遷,損失的能量會以光子的形式輻射出來,這個過程稱之為自發輻射,如圖7所示。

圖7 自發輻射過程
不同原子自發輻射產生的光子在頻率、相位、偏振方向及傳播方向上具有隨機性。白熾燈的工作原理就是基于自發輻射,通電后白熾燈燈絲中高能態電子數增多,頻繁地發生自發輻射產生大量光子。
原子中處于低能態的電子,也不是吃素的,隨時在觀察身邊是不是有外來光子經過,一旦有能量恰好等于兩個能級之間能量差(E2-E1)的光子出現時,就會啟動“吸星大法”,將光子的能量吸收過來,用來將自己提升到高能態,這一過程稱為受激吸收,如圖8所示。
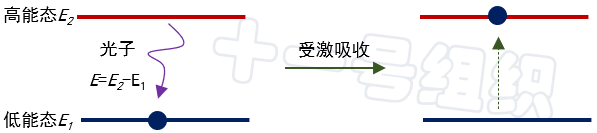
圖8 受激吸收過程
原子中處于高能態的電子,在見到上述外來光子時,也不會無動于衷,并且在輻射場能量夠大后,自己將向低能態躍遷并輻射出一個和外來光子具有相同頻率、相位、偏振方向及傳播方向的光子,聽起來有點像私奔,這個過程稱之為受激輻射,如圖9所示。

圖9 受激輻射過程
這樣,通過一次受激輻射,一個光子變為兩個相同的光子,這意味著光被放大了。到此為止,激光的直譯解釋中(受激輻射光放大)七個字已經悉數有序登場,但此時的光還不能稱為激光。
首先,自然條件下,原子中處于高能態的電子數目總是比低能態的電子數目少,所以外來光子經過,你很難保證是被低能態電子吸收發生受激吸收,還是被高能態電子看上,發生受激輻射。如果想要原子內部產生更多的受激輻射過程,就需要外界提供能量打破熱平衡,從而使高能態和低能態電子數出現反轉。
為了實現這個過程,一是需要采用容易發生高低能態電子數反轉現象的工作物質,這種物質被稱為增益介質。二是需要對增益介質進行激勵并提供讓增益介質不斷發生粒子數反轉的能量源,被稱為泵浦源。增益介質在泵浦源的激勵下,發生粒子數反轉,這是激光產生的前提條件。
其次,處于高能態電子也會發生自發輻射,更何況之前已經通過泵浦源人為的將低能態電子拉升到了高能態,這種自發輻射過程在沒有人為干預情況下會更加強烈,因此我們要想辦法讓受激輻射遠大于自發輻射,說白了就是要讓增益大于損耗。
辦法之一就是在增益介質前后兩端加上兩個反射鏡,其中一端是全反射鏡,另一端是部分反射鏡,這一結構被稱為諧振腔。當受激輻射發生后,方向合適的光子會在兩個反射鏡之間反復橫跳,多次經過增益介質,使增益介質內部反復產生受激輻射,如圖10所示。
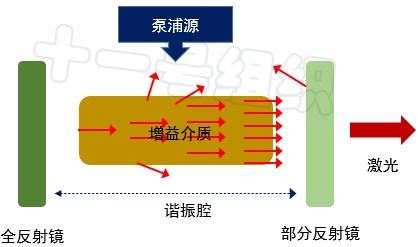
圖10 激光器內部光學系統組成
當光束放大到可以穿透部分反射鏡的閾值時,會從部分反射鏡中透射出來,形成激光束。由于兩面反射鏡位于特定的方向,對于方向不合適的受激輻射光會被濾除。同時兩鏡面之間的距離也對輸出的激光波長有著選擇作用,只有在兩鏡間的距離能產生共振的波長才能產生激光。
因此我們看到穿透部分反射鏡的激光束波長一致、方向一致、波束極窄,這也是諧振腔篩選的結果。
至此,一束激光算是真正誕生了。
二、激光器
增益介質、泵浦源和諧振腔是激光誕生所需要的主要光學系統,如果再輔以電源系統、控制系統和機械機構等,就可以組成一個利用受激輻射原理產生激光的完整激光器。
增益介質是光子產生的源泉,基于這個維度,激光器可分為氣體、液體、固體三種類型,固體類型激光器又可細分為固體、光纖、混合、半導體等類型,如圖11所示。應用在汽車領域的激光雷達,以半導體激光器和光纖激光器為主,下文我們對這兩類激光器展開介紹。
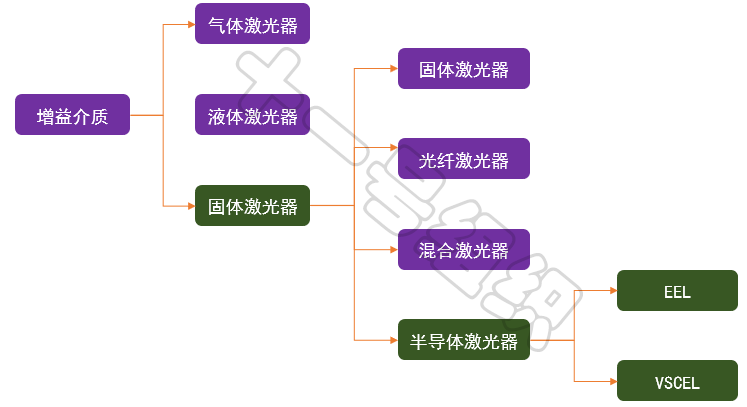
圖11 激光器的分類
(1)半導體激光器
半導體激光器的前綴是半導體,所以要介紹清楚,不得不從半導體最基礎的PN結說起。
P型半導體是通過在純凈半導體(不含雜質且無晶格缺陷的半導體)中摻雜特定雜質,讓空穴(相當于帶正電的粒子)數量增多。N型半導體也是如此操作,只是摻雜的雜質讓電子(帶負電的粒子)數量增多。空穴和電子被稱為載流子。
如果將P型半導體和N型半導體制作在同一塊半導體基片(硅或鍺)上,一方面由于濃度差,P型區多子(空穴)會向N型區擴散,而N型區多子(電子)會向P型區擴散,形成載流子擴散運動。另一方面,滯留的帶電離子(P區失去空穴產生負離子區,N區失去電子產生正離子區)形成的內電場,驅動P(N)型區的少子向低電勢移動,形成反向的漂移運動,如圖12所示。
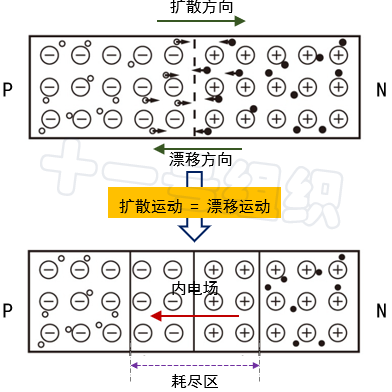
圖12 PN結的形成
當擴散運動和漂移運動所遷移的載流子數目相同時,達到動態平衡,就形成一個PN結。PN結中載流子數量非常少的一個高電阻區域稱為耗盡區。
如果給PN結施加一個正向電壓(P型區接正極,N型區接負極),正向電壓的電場與PN結的自建電場方向相反,它削弱了自建電場對擴散運動的阻礙作用。在外電場作用下,大量電子將被推向N區,其中一部分與空間電荷區正離子附近的空穴復合。大量空穴也會被推向P區,其中一部分與空間電荷區負離子附近的電子復合。載流子復合過程將會發射某種波長的光子,也就是發生了自發輻射。
隨著正向電壓上升,流經PN結的電流大于一個閾值時,自發輻射產生的光子通過半導體內已激發的電子-空穴對附近時,就能激勵二者復合再產生一個新的光子,也就是發生了受激輻射,再加上諧振腔的反射,就能通過受激輻射加速光子的產生,從而產生激光。
但是要注意的是,并非所有半導體材料PN結發生載流子復合時都會產生光,有的半導體材料會將部分能量轉化為熱耗散掉而不產生光,這就會導致發光效率的降低,因此為了提高發光效率,通常使用帶隙半導體作為發光材料,例如砷化鎵(GaAs)、磷化銦(InP)等。
總結一下:半導體激光器就是指使用半導體材料作為增益介質,采用半導體工藝在半導體材料中構造出大量PN結,在泵浦源的激勵下,PN結區域發生載流子復合從而發生受激輻射,受激輻射產生的光子在諧振腔的作用下最終生成一束激光。
半導體激光器使用的泵浦源主要有三種方式:電激勵、電子束激勵,光激勵和碰撞電離激勵等。絕大多數半導體激光器采用的是電激勵,即給PN結加正向電壓,以使在結平面區域產生受激輻射,也就是說是個正向偏置的二極管,因此半導體激光器又稱為激光二極管。
半導體激光器具有效率高、體積小、壽命長、低能耗等優點,成為現代激光技術發展的重要基礎,具有戰略性的發展意義。其根據諧振腔制造工藝的不同可分為邊緣發射激光器(Edge Emitting Laser,EEL)和垂直腔面發射激光器(Vertical Cavity Surface Emitting Laser,VCSEL)兩種。
EEL是在芯片的兩側鍍光學膜形成諧振腔,由于諧振腔與襯底(晶圓片)平行,因此EEL沿平行于襯底表面發射激光。
VCSEL是在芯片的上下兩面鍍光學膜,形成諧振腔,由于諧振腔與襯底垂直,能夠實現垂直于芯片表面發射激光。
EEL和VCSEL的結構對比如圖13所示。
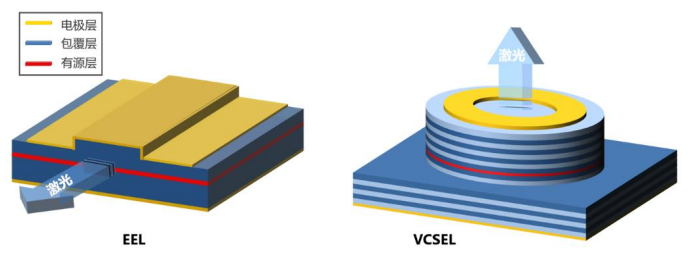
圖13 EEL和VCSEL的結構對比
以VCSEL為例,詳細介紹一下半導體激光器內部結構,VCSEL典型結構剖面如圖14所示,從上往下依次為P型接觸電極、上反射鏡、上氧化限制層、有源區、下氧化限制層、下反射鏡、襯底及N型接觸電極。
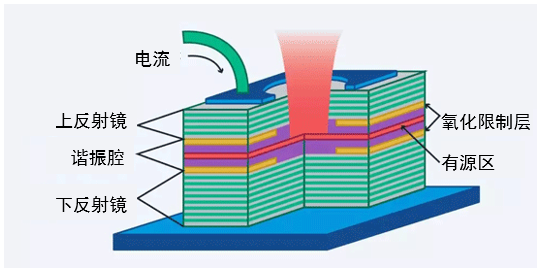
圖14 VCSEL典型結構
有源層通常由3~5個量子阱(一種薄層結構,可以在垂直于薄層表面的方向上限制粒子)組成。有源區的兩側是氧化限制層,一方面起著限制載流子的作用,另一方面起著調節諧振腔長度的作用,使其諧振波長正好是所需要的激光波長。
限制層兩側是上下反射鏡,通常采用N型和P型布拉格光柵(N-DBR/P-DBR)作為諧振器反射鏡。N-DBR在下方作為全反射鏡,反射率接近99.9%。P-DBR在上方作為部分反射鏡,反射率也大于99%。
在襯底(N型砷化鎵材料)和P-DBR的外表面制作接觸電極,形成歐姆接觸,并在P-DBR上制成一個圓形光窗口,獲得圓形光束,窗口直徑從幾微米可到百微米量級。
工作時,電流從P型電極注入,通過氧化層注入到有源區,會在有源區形成受激輻射實現激光輸出。激光的輸出方向垂直于有源區表面,穿過限制層表面,從低反射率的P-DBR反射鏡射出,最終穩定輸出激光。
EEL和VCSEL的主要性能差異體現在功率密度、溫漂系數、光束質量、光譜寬度和生產成本等方面,匯總如表1所示。
表1 EEL和VCSEL主要性能參數對比
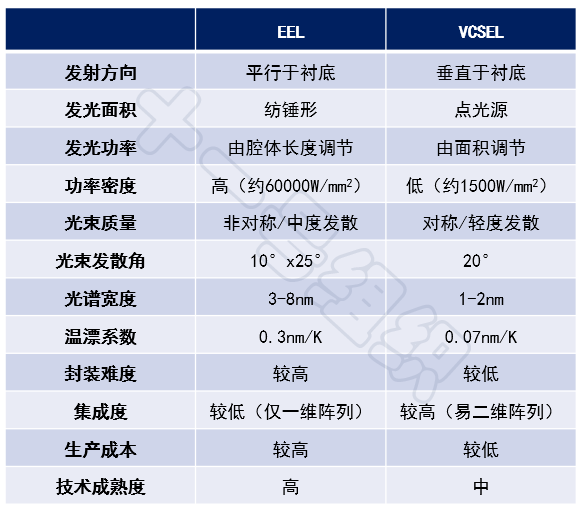
(a)功率密度。在激光領域,功率密度表示單位時間內,激光輻照在單位面積靶材上的能量大小,單位為W/mm^2。在其他條件相同的情況下,功率密度低意味著從被測物體表面反射回來的入射光功率低,這將導致探測距離短。
EEL的光功率密度一般是60000W/mm^2左右,而現在頭部廠商生產的五結VCSEL功率密度也只有1500W/mm^2左右,相差一個數量級。
(b)光束發散角。激光器發射出去的激光具有一定的發散角,發散角直接決定激光打到被測物體表面的光斑面積,從而影響了激光打在被測物體上的光功率密度,最終影響從被測物體表面反射回探測器表面的入射光功率。在其他條件相同的條件下,若發散角減小50%,則激光雷達探測距離將提升41%。
VCSEL打在物體上的光斑呈點圓形,遠場發散角典型值在20°左右。EEL打在物體上的光斑呈橢圓形,慢軸遠場發散角典型值在20°左右,遠場發散角典型值在30°左右,因此VCSEL具有相對較小的遠場發散角。
這樣的發散角大小其實都是不可接受的,都需要準直鏡和擴束鏡,來減小激光的發散角。
(c)光譜寬度。由于濾光片在接收激光時需要過濾掉特定波長(905 nm/1550 nm)以外的光,因此光譜寬度越窄意味著激光的抗干擾性越強,信噪比也就越高。目前VCSEL激光器的光譜寬度在1~2 nm左右,低于EEL的3~8 nm,擁有較強的抗干擾性。
(d)溫漂系數。溫漂是指激光波長隨溫度變化發生偏移的現象,偏移過大會導致回波信號被濾光片濾掉,無法被探測器接收到。當然也可以提高濾光片的光譜寬度,但這會導致信噪比減少,抗干擾能力減弱。目前VCSEL的溫漂大約是EEL的六分之一。
(e)生產成本。EEL是平行于襯底側面發光,所以在形成晶圓后還需要進行切割、翻轉、鍍膜、再切割的工藝步驟,無法按照現有半導體工藝來一次性處理,生產成本較高。VCSEL垂直于襯底正面發光,不需要在側面進行太多加工,只需要按照正常的半導體加工工藝批量處理即可,成本較低。按照Yole的統計,EEL的后道處理工序成本比VCSEL高了一倍以上。
(2)光纖激光器
光纖激光器和半導體激光器一樣,都是由能產生光子的增益介質,對增益介質進行激勵的泵浦源,使光子諧振放大的光學諧振腔三部分組成。
光纖激光器與半導體激光器的最大不同在于增益介質,半導體激光器使用的增益介質是半導體,而光纖激光器使用的增益介質是光纖。
半導體激光器的發光機理上文已經介紹過,泵浦源常為電激勵方式,而光纖不能夠直接實現電光轉換,因此泵浦源常采用光激勵方式,來實現光光轉換,光纖激光器最常用的泵瀑源就是半導體激光器。
光纖激光器按照增益介質、諧振腔結構可以細分為很多類型,下面以稀土摻雜類增益介質、光柵反射鏡諧振腔為例,介紹光纖激光器的工作原理,如所示。
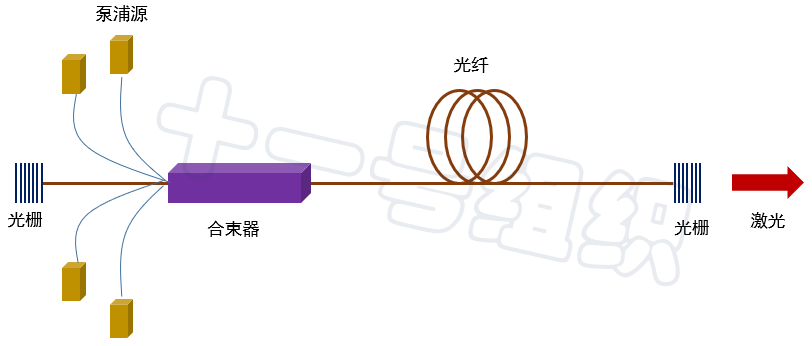
圖光纖激光器原理
泵浦源又被成為“種子源”,通過合束器為光纖激光器提供高功率、高亮度的泵浦光。工作時,泵浦源發出的泵浦光耦合進入增益介質光纖中,泵浦光被吸收,吸收了光子能量的稀土離子發生能級躍遷并實現粒子數反轉,反轉后的粒子經過諧振腔,由激發態躍遷回基態,釋放能量,并形成穩定的激光輸出。
三、波長
任何一種光都有波長,激光也不例外,激光雷達最常使用的波長為905nm和1550nm,主流激光雷達波長如表2所示。
表2 主流激光雷達波長

關于激光波長,繞不開的一個話題就是人眼安全。當一束強烈的可見光照射眼睛,我們會本能的閉上眼睛來躲避光線。但是對于激光這種不可見的近紅外光,當眼睛被照射時,眼睛并不會注意到它,如果累積了足夠的能量,激光就會對我們的眼睛造成不可逆的傷害,包括視網膜灼傷以及白內障。
為了評價這種傷害的級別,國際電工委員會(International Electrotechnical Commission,IEC)制定了一份激光安全標準IEC 60825,標準中根據最大允許暴露度(Maximum Permissible Exposure,MPE)對激光進行分類。MPE指在給定波長和持續時間內,在不允許引起生物組織損傷的情況下,每單位面積允許的最大激光能量。
IEC 60825將激光劃分為7類:1類、1M類、2類、2M類、3M類、3R類和4類。數字越大造成生物組織損傷的可能性越大,1類激光的風險非常低,并且“在合理可預見的使用范圍內是安全的”。4類激光在光束內觀察以及受到漫反射時都是危險的,它們還可能導致皮膚受傷,并有潛在的火災威脅隱患。
IEC60825用不同脈寬的激光器做了MPE實驗,如圖17所示,橫軸代表不同波長的激光,縱軸是人眼安全的MPE閾值,不同顏色的線代表不同脈寬的激光器。
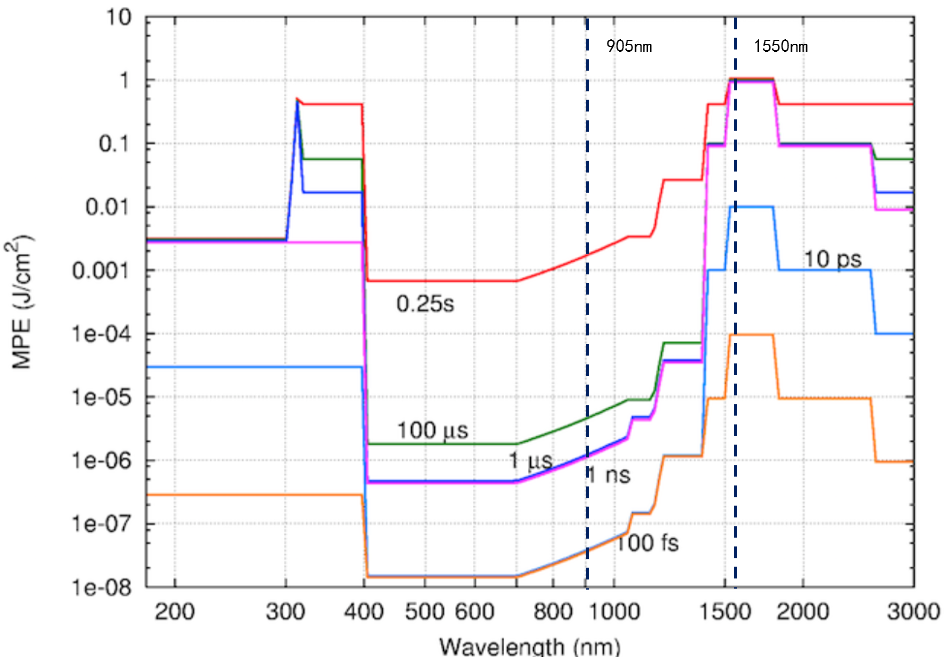
圖17 不同波長激光器的MPE值
從圖中可以看出,任何脈寬的1550nm激光器的MPE值都要比950nm激光器的MPE值高,這意味著人眼能承受更大能量的1550nm激光的照射,這意味著1550nm激光雷達將擁有更高的發射功率。
功率高、卻能保證人眼安全的原因是1550nm的激光容易被水吸收,而人眼表面正好又一層水(眼液),所以要想傷我的視網膜,先過了我這層水再說。
發射功率高帶來的最直接好處就是探測距離將更遠,不信你看使用一個1550nm激光器的圖達通的獵鷹靈動版激光雷達,在10%反射率的前提下,測距能力達到250m。而使用了905nm激光器的速騰聚創的RS-Lidar-M1激光雷達,在10%反射率的前提下,測距能力只有150m。
有矛就有盾,1550nm激光雷達的盾就是雨天,據部分公司的實測數據顯示:2毫米厚的水層,不對,應該叫水薄膜都能將1550nm激光的90%能量吸收掉,這意味這小雨天要慎用、中雨及大雨用不了。
當然業界有一種聲音,覺得如果雨水呈片狀的“水簾”或“水灘”的話,1550nm激光被吸收的概率很大,但是如果是“雨點”的話,基本不具備完全屏蔽1550nm激光的能力。其實這種聲音忽略了被測物體,無論大雨還是小雨,無論被測物體靜止還是移動,在雨中呆上一段時間后表面都會形成一層水膜,所以你即使能躲避雨滴的吸收,你能躲避得了被測物體上的水膜?
所以矛與盾必然存在,就看廠家如何使用。
03 掃描方式之爭
掃描方式是激光雷達最早也是最多被拿出來討論的話題,以至于很多人今天再聽到這個話題,都有一種“想吐”的感覺,但這條技術路線之爭卻是最充滿腥風血雨的。
激光器、探測器也存在技術路線之爭,但是很少聽說因為選了不同類型激光器而導致公司“家徒四壁”,也很少聽說因為選了不同類型探測器而導致公司“衣不蔽體”。
但掃描方式就不一樣,選得好的已經是主機廠的座上賓,而選得不好的,好一點可能是暫時退出車載激光雷達領域,壞一點已經直接破產倒閉。
所以掃描方式還是值得我們濃墨重彩地進行介紹。
按照掃描方式,激光雷達可以分為機械式、混合固態和固態三種。
機械式激光雷達實在沒什么可說的,發射模塊和接收模塊在電機帶動下,進行360°旋轉掃描。
混合固態激光雷達包括三條技術路線:棱鏡、轉鏡和MEMS微振鏡。棱鏡和轉鏡技術路線下,發射模塊和接收模塊固定不動,電機只帶動一面或幾面“鏡子”旋轉。MEMS微振鏡技術路線更進一步,連電機也取消了,微振鏡在靜電、電磁、電熱或壓電驅動下往復運動,實現掃描。
固態激光雷達人如其名,就是內部沒有一點機械運動部件,包括光學相控陣(Optical Phased Array,OPA)和Flash兩種方案。
下文主要對激光雷達混合固態和固態兩種掃描方式進行介紹。
一、混合固態
(1)棱鏡
棱鏡路線的代表人物,也是唯一走這一條修煉道路的激光雷達廠商是LIVOX。LIVOX的名聲大噪并不是因為它的母公司大疆創新在無人機領域的獨霸武林,而是因為在2020年1月直接推出6499元面向自動駕駛領域的激光雷達Horizon。
LIVOX獨創的非重復掃描技術,在0.1s的積分時間內,掃描覆蓋率與機械旋轉式64線激光雷達相當,而彼時機械旋轉式64線激光雷達的平均價格還在10萬元人民幣左右。業界嘩然,質疑、嫉妒與殷羨如潮水般涌來,都想弄清楚這到底是一類什么樣的神奇物種?
LIVOX的思路也非常簡單,既然成本主要花在收發模塊上,那我就從減少他們數量上著手。可是數量減少,怎么實現和高線束機械旋轉式激光雷達一樣的點云效果呢?
LIVOX給出的解決方案是采用空間激光通信領域的旋轉雙棱鏡(或稱旋轉雙光楔)方案,如圖所示。在此方案中,半導體激光器PLD和雪崩光電探測器APD固定,雙棱鏡在電機帶動下進行高速旋轉。通過對光學參數進行特殊設計,可以產生不同角度的折射光線,從而實現視場角范圍內更高線束的覆蓋。而隨著電機轉速的不同,會產生出不同的掃描圖案。
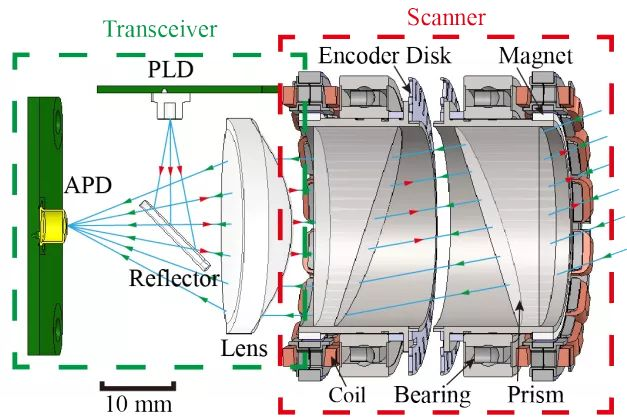
圖LIVOX激光雷達雙棱鏡結構
激光收發模塊數量減少了(2021年8月上市的小鵬P5搭載的Livox車規版激光雷達HAP只有6組收發器,但100ms積分時間里可達到與144線機械旋轉式激光雷達相同的點云效果),成本相應就大幅降低。激光收發模塊固定,電機只須帶動雙棱鏡旋轉,避免了類似傳統機械旋轉式激光雷達的多次裝調問題,量產能力也相應得到提高。
剩下就只有車規這一道關卡了,因為要用6組激光收發模塊實現與144線機械旋轉式激光雷達相同的點云效果,雙棱鏡在單位時間就必須玩命的轉,最終導致電機轉速高達6000r/min。要知道過了車規的Scala電機轉速只有600r/min。
電機的壽命與電機的轉速成反比,高轉速對軸承及油脂選擇大有講究,這需要大量的耐久試驗及超高的工藝水準,這類基礎工藝也是中國制造業普遍欠缺的。
如今三年過去了,Horizon已從公司主頁介紹中消失,繼任者HAP在獲得小鵬P5的定點后曾盛極一時,但很快湮滅在競爭對手的鐵蹄下。2023年初,據宇多田在《一家大廠激光雷達的暫時“離場”》文章中報道:LIVOX已經決定暫時退出車載激光雷達業務線,轉向“利潤率傾軋沒那么可怕”的工業與低速機器人等業務線。
我其實想不負責任的猜測一下:退場的原因不是利潤率,而是棱鏡這條技術路線適合不了車載領域,遲遲無法讓產品達到滿足主機廠要求的可靠穩定,會讓研發陷入暗無天日的忙碌。韜光養晦,我想這是明智的選擇。
(2)轉鏡
轉鏡賽道就比較熱鬧了,國外的廠商有Valeo、圖達通,國內的有禾賽科技、鐳神智能、華為等。且這一技術路線是最早誕生過車規產品的路線,就是Valeo和Ibeo合作研發的Scala。
2017年量產的第一代4線Scala 1是全球首款通過車規級認證的激光雷達,同年被首發搭載在奧迪A8上。2021年量產第二代16線Scala 2車規級激光雷達,同年被首發搭載在全新奔馳S級轎車上,Scala 2實物如圖1-3所示。第三代Scala 3正在研發中,預計在2024年量產。
轉鏡方案中激光雷達收發模塊不動,電機帶動掃描鏡圍繞其圓心不斷旋轉,從而將激光束反射至空間的一定范圍,其技術創新方面與機械旋轉式激光雷達類似。在轉鏡方案中,存在一面掃描鏡(一維轉鏡)、兩面掃描鏡(一縱一橫,二維轉鏡)及多面鏡等多種細分技術路線。
一維轉鏡方案常采用多面體反射鏡,并通過小電機帶動其旋轉,從而將激光反射到不同的方向,此方案激光掃描線束依舊與激光雷達收發模塊數量一致,僅是減少機械轉動部件,比如禾賽科技的AT128。
二維轉鏡方案內部集成了兩個轉鏡,一個多邊棱鏡負責橫向旋轉,一個負責縱向翻轉,這樣可以實現用一束激光實現兩個方向維度上的掃描。此方案可以用更少的激光收發模塊實現相同線束掃描效果,比如圖達通的Falcon。
多面鏡通過特殊的鏡面設計,可以進一步減少激光收發器數量,在集成難度和成本控制上更有優勢。
轉鏡方案相比棱鏡方案,電機的轉速明顯下降,最高只有2000r/min。但仍存在高溫耐久穩定性、視場角受限,信噪比低等問題。雖然各家推出的產品都說是車規級,但五年十萬公里入門要求估計還很難達到,車規也分三六九等。
(3)MEMS微振鏡
微機電系統(Micro-Electro-Mechanical System,MEMS)微振鏡本質上是一種硅基半導體元器件,其特點是內部集成了微型的可繞懸臂梁振動的反射鏡,如所示。
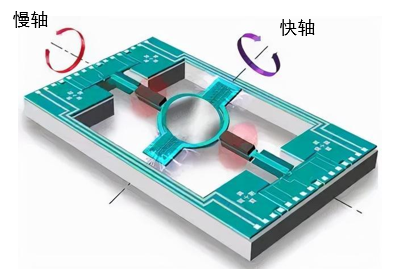
圖MEMS微振鏡
微振鏡被上下左右四個硅懸臂梁掛著,上下短懸臂梁被稱為快軸,左右長懸臂梁被稱為慢軸。在靜電或電磁驅動下,微振鏡可以在水平和垂直兩個自由度圍繞懸臂梁做往復運動,從而實現水平、垂直兩個維度掃描。
也正是因為懸臂梁機械結構的存在,MEMS微振鏡激光雷達雖然完全沒有電機,但還是被劃分在了混合固態之列。
慢軸的諧振頻率通常為5~30Hz,為了使振動幅度大一些,其一般都做得比較細長,慢軸變形程度直接與水平視場角關聯。快軸的諧振頻率通常大于1KHz,為了可以實現這么高的諧振頻率,一般做得又粗又短,快軸變形程度直接與垂直視場角關聯。
微振鏡的諧振頻率與掃描頻率正相關,振動幅度與掃描角度正相關,而掃描頻率和掃描角度之間負相關。以某供應商的一款MEMS微振鏡產品舉例,鏡面尺寸4X4.6mm,水平掃描角度為40°,垂直掃描角度為30°。所以一般為了實現水平120°的視場角,多數廠家選擇拼接激光器的方案,幾個激光收發單元共用一組MEMS微振鏡,實現大視場角掃描。
憑借運動部件少、可靠性高、掃描頻率快、半導體規模化生產帶來的成本較低等優勢,2021年底的時候,MEMS微振鏡激光雷達迎來了自己的高光時刻,國內但凡規劃有量產激光雷達車型的車企,80%都選擇了國內一家供應商的MEMS微振鏡激光雷達產品(主要也是其他技術路線當時沒有能打的對手)。
但是這條技術路線也不是完美無缺,激光雷達按照收發光路來區分,可以細分為同軸和非同軸兩種方案。
同軸方案是指激光器發射出去的激光和探測器接收回來的激光同軸,如圖所示。對于MEMS微振鏡來說,一種典型技術方案是:激光器發射出激光,經過一面穿孔的反射鏡,入射到微振鏡上,經微振鏡反射后打到被測物體后返回,會再次通過微振鏡反射給穿孔的反射鏡,從而被探測器接收。
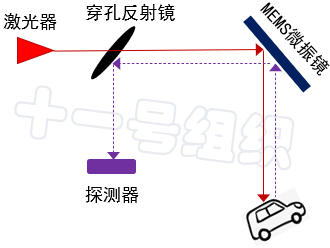
圖 同軸方案
同軸方案的好處顯而易見,只接收原光路返回的光信號,因而具有較好抗陽光干擾能力;收發模塊可集成于一處,采用單顆探測器即可,成本相對可控。多個激光器拼接時,可以實現同時掃描互不干擾。Innoviz,速騰聚創部分產品采用的正是這種方案,其拿下的中國主機廠定點數量,恐怕十個指頭數不過來。
但是同軸方案中MEMS微振鏡尺寸直接與激光雷達測距能力關聯,尺寸小,接收反射回來激光能力就弱,探測距離就短;尺寸大,接收反射回來激光能力強,探測距離長。為了實現更長的測距能力,激光雷達廠商普遍選擇了更大尺寸的MEMS微振鏡。
但從加工工藝來說,成熟工藝的硅基MEMS微振鏡鏡面直徑1mm左右,其質量非常輕,可靠性是沒問題的。但是當前激光雷達中的MEMS微振鏡鏡面直徑普遍在5mm左右,在如此“負重”下,慢軸和快軸進行高頻次大幅度來回扭轉,將會變得更加容易斷裂,這也是為什么MEMS微振鏡激光雷達理論上容易過車規,但實際上卻沒那么容易的原因。
非同軸方案是指激光器發射出去的激光和探測器接收回來的激光不同軸,如圖21所示。這意味著打到被測物體返回來的激光不用經過MEMS微振鏡,而是直接進入到探測器中。此種方案中,MEMS微振鏡可以選用更小的尺寸,可靠性會顯著提高。
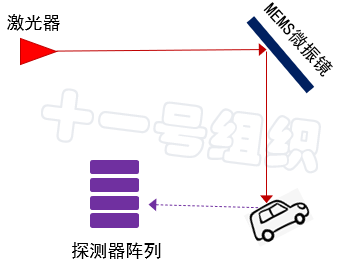
圖 非同軸方案
但是該方案為了提高抗陽光干擾能力,需要陣列化、性能更優的探測器,系統復雜度升高、體積較大,成本較高,一徑科技的ML30s補忙激光雷達選用的就是非同軸方案。
溫度是擺在MEMS微振鏡面前另一座大山。采用硅基半導體工藝的MEMS微振鏡,其線圈都很細地密布在鏡面背后,導熱性較差。與此同時,硅基MEMS微振鏡被封閉在激光雷達的機殼里面。工作中的激光雷達,其MEMS微振鏡的工作溫度將比環境溫度高至少20°,按照車規-40℃~85℃的要求,MEMS微振鏡的車規溫度要求要達到-40℃~105℃。這個對當前供應鏈來說確實有點困難。
二、固態
固態激光雷達則主要有 OPA和 Flash兩種主流技術路線。
(1)OPA
光學上,對于頻率(波長)相同、振動方向相同、相位差恒定的兩束光,被稱作相干光。相干光在傳輸時,相互之間會產生穩定的干涉。這種干涉,既可以是相長干涉(如圖左圖),也可以是相消干涉(如圖右圖)。很顯然,相長干涉可以讓光變得更強。
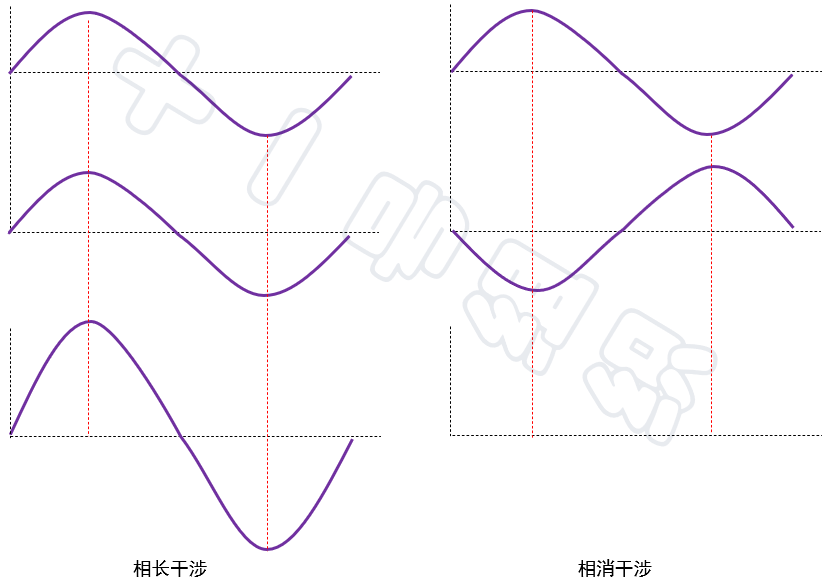
圖22 光的干涉現象
如果有多路光,在沒有相位差(等相位)的情況下,發生相長干涉,光束的指向垂直于多路光的等相位面向前傳播,如圖最左測圖所示。如果賦予各路光均勻的相位差θ,那么各路光的等相位平面也將發生偏轉θ,滿足等相位的光發生相長干涉,不滿足等相位的光發生相消干涉,因此光束的指向也發生了角度為θ的偏轉,這就是一維光學相控陣的掃描原理。
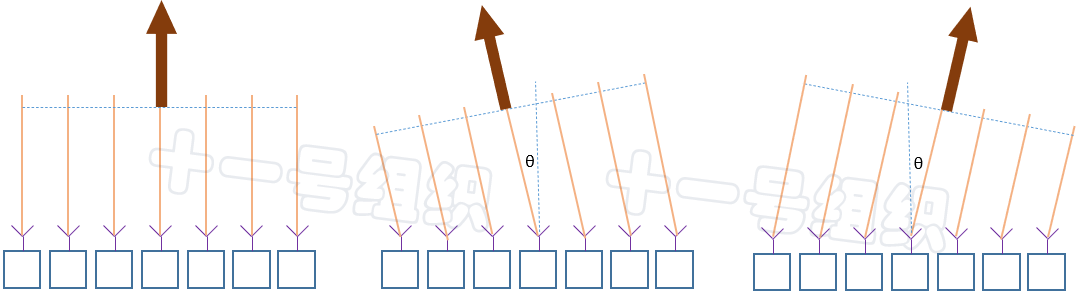
圖光學相控陣一維掃描原理
如果將這樣的發光單元組成二維的光束陣列,那么便可以實現二維光學相控陣的掃描。
OPA激光雷達運用的就是光的相干原理,將若干激光發射單元組成發射陣列,通過改變加在不同發射單元上的電壓,改變不同發射單元發射光波相位,在設定方向上產生互相加強的相長干涉,從而合成具有特定方向、高強度的激光主光束。而其它方向上從各個發射單元射出的光波產生相消干涉,輻射強度接近于零。
OPA激光雷達的一種典型結構如圖所示,激光光源經過分光器后進入光波導陣列,在光波導上通過外加電壓,利用光波導間的光波相位差實現光束的掃描。
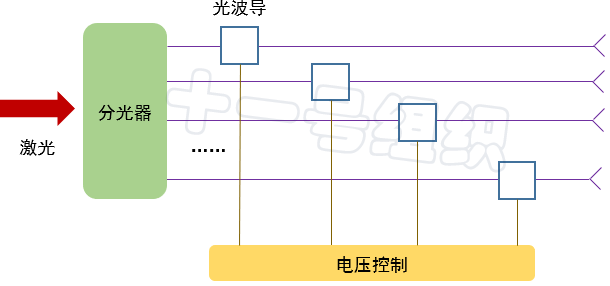
圖 OPA激光雷達的一種典型結構
OPA激光雷達是真正的純固態激光雷達,所以將在可靠性、穩定性、成本、集成度、工藝上具有巨大優勢。此外,OPA激光雷達還具有幾個與眾不同的優點:
(1)可以實現較高的掃描速度,達到MHz量級以上;
(2)掃描精度較高,可以做到千分之一度量級以上;
(3)可控性很好,在允許的角度范圍內可以做到任意指向,所以可以任意設計感興趣(Region of Interest,ROI)區域。
但是OPA激光雷達在封神的道路上還存在一些阻礙:
(1)旁瓣效應。OPA激光雷達形成的主光束稱為主瓣,在主瓣旁邊,由于陣列干擾,還容易形成旁瓣,如圖所示。旁瓣一方面會分散主瓣能量,影響探測距離。另一方面為了區分出主瓣,通常將旁瓣遮掉,而這又將影響視場角。
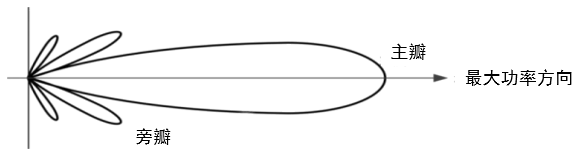
圖旁瓣示意圖
(2)工藝要求高、加工難度大。光學相控陣要求陣列單元尺寸必須不大于半個波長,對于905nm波長激光雷達來說,這就意味著陣列單元的尺寸必須不大于500nm。而且陣列數越多,陣列單元的尺寸越小,這就對加工精度要求更高;
(3)掃描角度有限。目前相位調節只能達到±60°左右。
OPA激光雷達的代表人物是美國的Quanergy,公司在2016年就公布了其OPA激光雷達產品,不過如今已經破產。
(2)Flash
前文介紹的幾種掃描方式激光雷達,無論是轉鏡、MEMS還是OPA類型,發射模塊發射出來的激光都是線狀的,需要通過掃描模塊的往復運動(分機械運動和非機械運動)把線變成面打在被測物體表面,因此掃描模塊是必須的。
但是Flash激光雷達人如其名,采用的是快閃的非掃描方式,通過在短時間直接發射出一大片激光脈沖(面陣光),再通過高度靈敏的探測器接收,完成被測物體三維圖像的構建。不嚴謹點比喻:Flash激光雷達就是一個會自己發光的攝像頭。
這個時候再拿出禾賽科技招股書中的那張ToF激光雷達系統圖,如圖所示,掃描模塊部分的虛線就不會顯得那么突兀了,掃描模塊后括號里的若有就可以合理解釋了。而Flash激光雷達就是沒有掃描模塊,只有發射模塊和接收模塊。
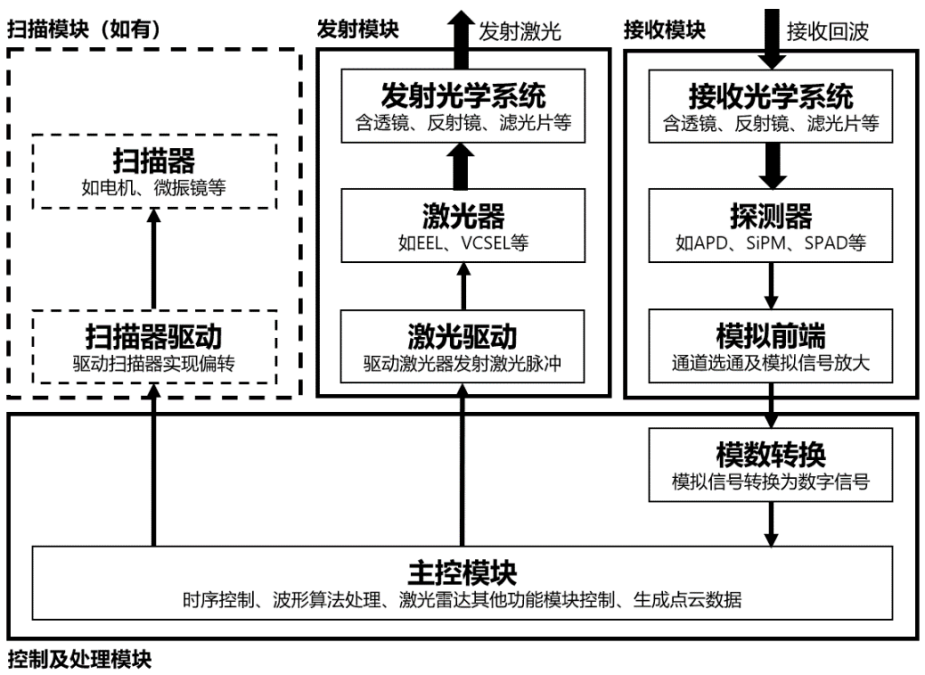
圖 ToF激光雷達系統圖
因VCSEL比EEL具備更大的發光面積,視場角可以做得比較大,更符合泛光成像的特點,因此Flash激光雷達多選用VCSEL作為激光器;EEL也不是不可以,但需要設計復雜的光學系統去擴散EEL發出來的激光,因此很少使用。
但是VCSEL功率密度低的缺陷,成為限制Flash激光雷達探測距離提升的主要瓶頸。這也是為什么當前發布的Flash激光雷達產品多以短距為主,但隨著多結VCSEL激光器技術的突破,使用VCSEL開發長距激光雷達產品將成為可能。
當功率密度低遇上泛光成像,從被測物體返回來來的功率密度將更低,而探測器端也被迫選擇了信噪比更高的探測器SPAD。
除了激光器和探測器,Flash激光雷達的光學系統和其他類型激光雷達也有所不同。
其他類型激光雷達發射光學系統通過對激光器發射出來的激光進行準直和整形,來使得激光發散角減小且符合使用要求的形狀,接收光學系統通過收集反射后的光能量,并將其匯聚到探測器的光敏面上,以提高探測距離。
而Flash激光雷達要求發射出去的激光光束盡可能均勻地在整個視場角內擴散,因此不需要準直單,二是需要光束擴散器,控制發射激光視場角從而使變得均勻。Flash激光雷達接收光學系統相比于其他種類激光雷達需要具備“大相對孔徑”和“照度均勻”的特點,但是三種類型激光雷達所用光學元器件沒有太大差異。接收光學系統的“接收鏡頭組”由多個球面和非球面透鏡組成,多個透鏡會依次改變光束的視場角直至達到設計的HFOV和VFOV。
說起Flash激光雷達廠商,大家首先想到的應該是難兄難弟Ibeo和Ouster,但最早開始做Flash激光雷達的的確是大陸集團(2016年3月收購Flash激光雷達公司Advanced Scientific Concepts后獲得此項魔法),只不過參數太過樸素罷了。
2017年大陸集團發布第一款Flash激光雷達SRL121,905nm波長,27°x11°的視場角,10m的探測能力,確實沒什么姿色。2019年大陸集團發布第二款HFL110,1064nm,120°x30°視場角,22m的探測能力,姿色見漲也使其獲得豐田氫燃料電池汽車Mirai和雷克薩斯LS500的青睞,用作側向補盲。
第一篇文章中介紹已破產的Ibeo,2019年發布的距、短距和近距三款固態激光雷達產品,采用的正是Flash技術路線。
與Ibeo齊名,并與Velodyne已合并的另一家國外激光雷達企業Ouster,在2021年也發布了Flash激光雷達,同樣包括短、中、長三款,里面將使用自研的SPAD探測器芯片,并計劃在2025年量產上車。
2022年5月13日,亮道智能面向中國市場發布自研的純固態Flash激光雷達——LDSense Satellite。
部分已發布Flash激光雷達參數匯總如下表3。
表3 部分Flash激光雷達參數
04 探測器之爭
探測器遵循的處世之道:來而不往非禮也,激光器發射出去的激光、由探測器進行回禮接收并轉化為電信號。這個處世之道的理論基礎就是光電效應,而這個效應卻源于一個意外的發現。
1886年,海因里希·赫茲(Heinrich Rudolf Hertz),就是那個用實驗證明電磁波存在的男人,就是頻率單位以他名字命名的男人,正在為證實麥克斯韋的電磁理論而專心致志地做電火花放電試驗。
赫茲的實驗裝置如圖所示,主要包含電火花發生器和電火花接收器兩部分組成。在開關閉合,電壓上升到2萬伏之后,兩個小球之間的空氣就會被擊穿,產生藍色電火花,同時引發一個向外傳播的電磁波。而在不遠處的接收器將感應出一個電動勢,同樣也在接收器的小球間產生電火花。
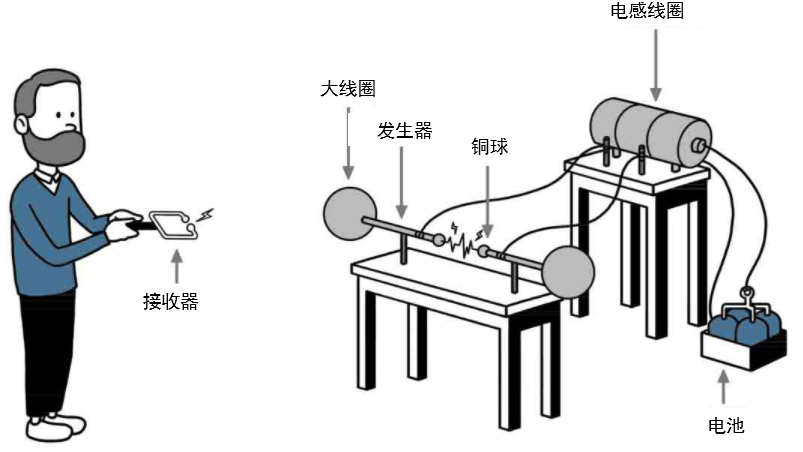
圖 赫茲試驗裝置簡圖
證實了電磁波存在之后,赫茲又開始通過實驗研究起了電磁波的性質,一次偶爾的機會,赫茲用紫外線照射接收器,發現接收器兩個小球間更容易產生電火花且電火花更亮。1887年,赫茲在《物理學年鑒》上發表了題為《論紫外光對放電的影響》的論文,揭開了光電效應研究的序幕。
后來這一現象引起了眾多物理學家的關注,并在經年累月的試驗研究后,還原了這一效應的本來面目。
激光器章節我們介紹過,物質都是由原子組成,而原子是由原子核和繞核運動的電子組成。但這個電子不是一個安分的家伙,在吸收部分能量變得強大之后就會嘗試掙脫原子核的束縛選擇逃逸,逃逸所需的最小能量被稱為逸出功。
所以當外界有一個光子經過電子時,且光子能量大于電子逃逸所需的逸出功時,電子便有一定概率可以掙脫原子核的束縛,逃逸成為一個光電子,并留下孤獨的空穴,此過程產生的電子-空穴對被稱為光生載流子,這個過程被稱為碰撞電離。
需要注意的是,當經過的光子能量恰好等于電子兩能級之差時,電子吃掉光子后會由低能級躍遷到高能級,也就是激光器之爭部分介紹的受激吸收,電子只是發生能級變化,并不能脫離原子核束縛變成自由電子。
光子的能量由光的頻率決定,能使物質中電子逃逸出來的光子頻率稱為該物質的截止頻率或極限頻率,所以只有當照射物體的光子頻率大于這一極限頻率時,才會發生光電效應。
一、光電二極管
激光探測器正是利用光電效應將光轉換為電的一種高靈敏度的半導體電子設備,主要部件就是光電二極管(photodiode,PD)。普通二極管我們比較熟悉,最常見的是由一個PN結加上相應的電極引線及管殼封裝而成,具有單向導電性,加上正向電壓時,二極管導通, 加上反向電壓時,二極管截止。
PD與普通半導體二極管類似,只不過PD工作在反向電壓下,且可以暴露在外,通過窗口或光纖連接進行封裝,從而使光到達器件的感光部分。
與此同時,PD最常使用的不是PN結,而是PIN結。PIN結相比于PN結,中間多了一個I層,I層是摻雜濃度很低的一層N型半導體,由于濃度低的近乎本征(Intrinsic)半導體,故稱I層。
I層較厚,幾乎占據了整個耗盡區。絕大部分的入射光子在I層被吸收并產生電子-空穴對(光生載流子)。在I層兩側是摻雜濃度很高的P型和N型半導體,P層和N層很薄,吸收入射光子的比例很小,產生少量的光生載流子。
這種結構可以大大加快光電效應的響應速度,但是過大的耗盡區寬度將延長光生載流子在耗盡區內的漂移時間,反而導致響應變慢,因此耗盡區寬度要合理選擇。通過控制耗盡區的寬度可以改變PIN結二極管的響應速度。
在實際使用中,根據反向偏置電壓的不同,PD可以工作在三種不同的模式下,即線性模式、比例模式和蓋革模式,其中比例模式和蓋革模式合起來就是我們說的雪崩模式。普通PD工作在線性模式下,APD和SPAD工作在雪崩模式,如圖所示。
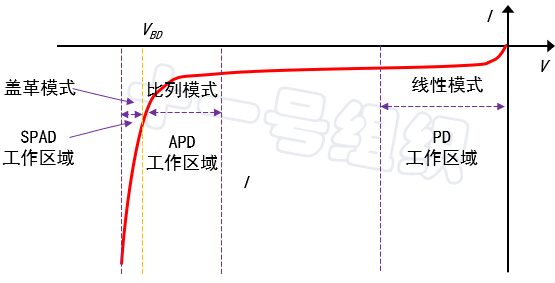
圖PD三種工作模式
普通PD沒有光照時,反向電流很小(一般小于0.1微安),稱為暗電流。當有光照時,光子能量被普通PD中的電子吸收,逃逸出來成為光電子,使反向電流線性增大,如圖所示。
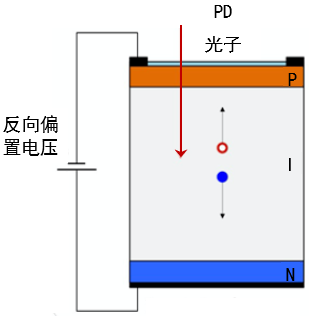
圖 PD結構及工作原理
二、雪崩光電二極管(Avalanche photodiode,APD)
APD工作在雪崩模式下的比例模式,如上面圖3所示,表現出有限的增益。
當APD兩端反向偏置電壓高于雪崩電壓小于擊穿電壓VBD時,耗盡區的電場大小可以使得電子達到離化的閾值。在合適的光子照射下,I區電子吸收能量逃逸出來產生光電子,這個光電子在電場作用下移動,會去碰撞其他的原子,從而產生新的電子-空穴對,如此連鎖反應,就像是雪崩了一樣,因此被稱為雪崩模式,如圖所示。
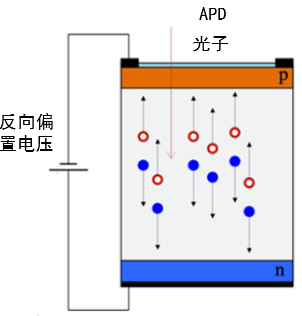
圖 PAD結構及工作原理
在雪崩模式下,APD電流與電壓呈比例關系,具備高增益(1-103倍),在光子照射下電壓很小的變化也會導致電流發生較大變化。因此APD是一種靈敏的測量光強的方法,但此靈敏度還不足以檢測單個光子。
三、單光子雪崩二極管(Single photon avalanche diode,SPAD)
SPAD工作在雪崩模式下的蓋革模式,如上面圖3所示,此時SPAD表現出無限的增益。
當SPAD兩端反向偏置電壓高于擊穿電壓VBD時,耗盡區的電場大小不僅可以使得耗盡區電子達到離化的閾值,而且也將使空穴達到離化的閾值,這意味著除了光電子能夠移動去碰撞其他原子,產生的空穴也將反向移動去碰撞其他原子,如此循環反饋,引發自我維持的雪崩,如圖所示。
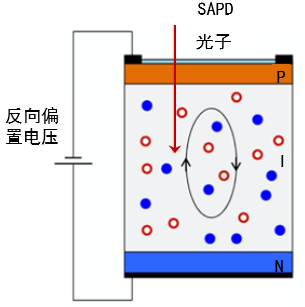
圖SPAD結構及工作原理
在蓋革模式下,SPAD理論上增益可以達到無限大,因此SPAD是一種更靈敏的測量光強的方法,靈敏到可以檢測單個光子。
由SPAD工作原理可知道,上述雪崩過程是自維持的,也就是說若沒有外界干擾,雪崩將會一直持續下去。那么將產生兩個問題,持續毫安級的大電流流經設備,會將設備燒毀;二是無法區分不同時間間隔到來的光子。
解決上述問題的一個方法就是淬滅電路,最簡單的一種淬滅電路如圖所示,通過在SPAD串聯一個千歐量級的大電阻。當SPAD內部發生雪崩產生大電流后,大電阻的分壓作用將使SPAD兩端的偏壓降級,使其無法繼續發生雪崩。
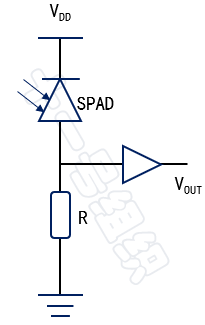
圖 SPAD一種淬滅電路
雪崩過程被終止后,SPAD兩端的偏壓將會以較快的速度開始充電過程,再將電壓提高到可以觸發雪崩模式的大小,等待下次光子觸發。如此循環往復,形成與光信號對應的脈沖信號。如果將SPAD的輸出連接到電壓鑒別器,就能產生一個從邏輯0到0的數字信號輸出,表示單個光子的到達。
結合圖我們再來詳細說明一下淬滅的過程,給SPAD加載使其處于擊穿態的偏置電壓VBR,并處于亞穩態A點,在此狀態下下,當有光子照射時,引起雪崩效應,從而出現電流脈沖(點A到B)。在淬滅電路作用下,偏置電壓由B復位到C。而后經過充電過程,反向偏置電壓將由C恢復到A,SPAD再次準備探測單個光子。
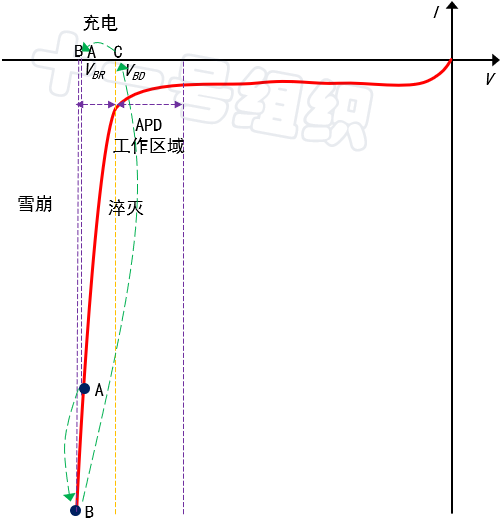
圖 淬滅工作過程
四、優缺點比較
(1)探測光子量級。如圖所示,APD最小探測的光子量級在 103,所以對于長距低反只有幾十個光子返回的被測物體,APD無能為力。SPAD是單光子探測器,只需要一個光子但也至多檢測一個光子,因為每次光子觸發雪崩之后,需要幾個納秒的死區時間來準備下一次檢測,所以SPAD的最大基數率有限制,大約100MHz。
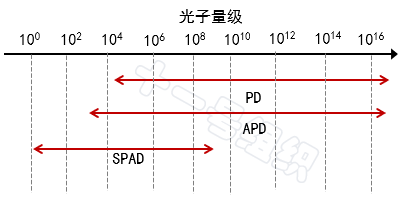
圖 探測所學光子量級比較
(2)連續信號采集。APD無死區時間,可以對光照進行連續信號采集,連續接收信號光。但是SPAD存在死區時間,即觸發一次雪崩后,需要進行淬滅及充電,所需的死區時間從從幾納秒到一微秒不等。在死區時間里,SPAD對光不再敏感,無法接收光子,因此無法對光照進行連續信號采集。
(3)抗環境光干擾。APD需要由多光子觸發,雖沒有那么靈敏但也受環境光干擾較小。SPAD可由單光子觸發,靈敏的同時也較容易受到環境光及其他激光雷達的干擾。
(4)集成難度。硅基SPAD的一大優點就是CMOS兼容性,即SPAD和電路可以在同一晶片上實現,易于制作高分辨率的密集陣列且成本較低。而APD屬于分立器件,想要用作陣列就會加大自身尺寸且價格較高。
(5)光電增益高。SPAD的光電增益可以說是無限的,高增益讓SPAD更為敏感,可以檢測出單個光子。而APD的光電增益是有限的,無法對單光子進行檢測。
(6)時間精度高。SPAD的時間精度可達100ps,信號傳輸速度快。
五、小結
因為入局門檻太高,所以研發SPAD的企業數量少、產品稀缺,核心技術還是掌握在國外供應商手里。目前市面上真正可以看到的車規級傳感器,只有安森美的Padion SPAD和索尼的IMX459,而在中國市場,阜時科技、靈明光子、芯輝科技、宇稱電子等也在布局研發SPAD,主要專注的市場還是在機器人、無人機等領域,部分企業開始推出車載產品。
05 測距方式之爭
測距方式是激光雷達更高維度的分類方式,針對其優缺點討論更是絡繹不絕。
按照測距方式不同,激光雷達主要分為飛行時間法(Time of Flight,ToF)與調頻連續波(Frequency Modulated Continuous Wave,FMCW)法兩類。
ToF法是目前量產激光雷達的絕大多數選擇,FMCW法僅有極少數廠家可以提供量產產品。
一、ToF
在ToF方法中,激光器在短時間間隔內一個接一個地發射多個激光脈沖,如圖所示。
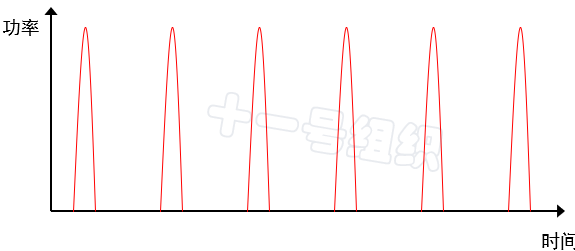
圖 ToF激光雷達激光脈沖
激光脈沖打到物體后返回,探測器檢測到回波后,內部處理單元計算發送和接收之間時間差,并基于公式距離=光速x時間差來計算激光雷達與被測物體之間距離,測距原理如圖所示。
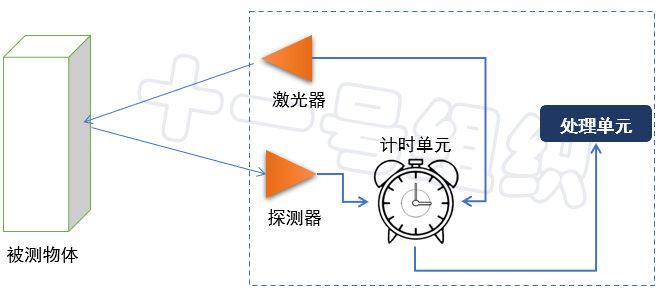
圖 ToF激光雷達測距原理圖
二、FMCW
FMCW激光雷達雖然近兩年才開始在自動駕駛領域走紅,但它的身份其實是個60后,1967年誕生于麻省理工學院林肯實驗室。
與ToF激光雷達發射脈沖激光束不同,FMCW激光雷達發射的是調頻連續激光束,同時分成兩束,一束留在本地作為本振光,一束發射出去。而通過相干檢測的方式,測量回波信號與本振光之間由距離延時引入的調制頻率差和相對速度引入的多普勒頻率差,可以求出被測物體的距離與速度。
FMCW激光雷達常用的調頻方式有三角波形式、鋸齒波形式和正弦形式,如圖所示。周期T稱為信號重復時間,頻率的變化范圍稱為調制帶寬B。
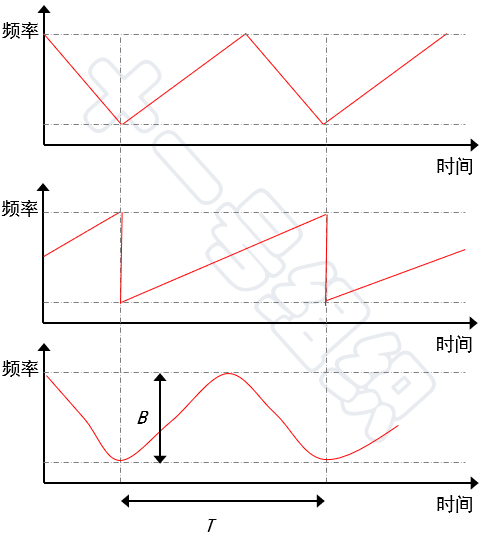
圖 FMCW激光雷達常用的三種調頻方式
FMCW激光雷達可以根據測量目的不同,選擇不同的調制方式。比如與被測物體之間多普勒效應可以忽略的場景,可以選用鋸齒波調制方式,從而實現更大的探測距離。而如果想要實現同時測距和測速,且更容易解調出多普勒頻移,三角波調制方式是個不錯的選擇,三角波調制方式也是車載FMCW激光雷達最常使用的方式。
下面我們以三角波調制方式為例,介紹FMCW激光雷達的測距和測速原理。
發射出去的調頻連續激光束,在打到被測物體后,由于多普勒效應,會發生頻率變化,假設被測物體正在朝遠離激光雷達的方向運動,那么回波信號的頻率將下降。由于多普勒效應導致回波信號與發射信號之間頻率出現的差值稱為多普勒頻移fd,如圖所示。
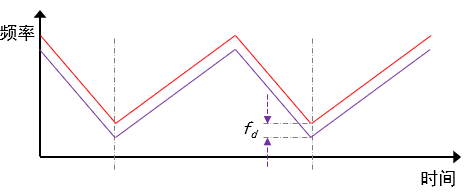
圖多普勒頻移
此外,由于激光雷達和被測物體之間有一段距離,信號傳輸需要一定時間,因此存在因距離延時引入的調制頻率差fr,如圖所示。
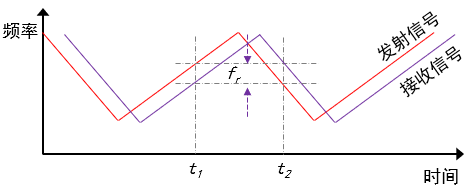
圖 調制頻率差
當多普勒效應遇上距離延時,兩種作用疊加在一起,就變成圖所示的效果。
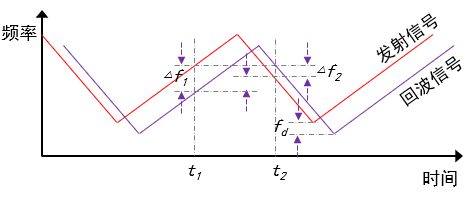
圖多普勒效應遇上距離延時綜合作用
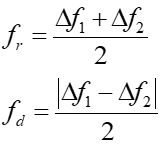
由圖6可以看出,在頻率上升沿t1時刻產生的頻率差為Δf1=fr+fd,在頻率下降沿t1時刻產生的頻率差為Δf2=fr-fd,聯立方程組即可求出fr和fd。
對于發射信號來說,其頻率變化速率為2B/T,則距離延時用頻率差除以頻率變化速度即可求出。
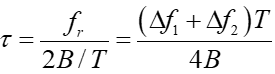
有了距離延時,再乘以光速c,便可以求出與被測物體的距離R。
最后根據多普勒公式,還可以求出被測物體的速度。
三、對比
FMCW激光雷達被稱為激光雷達領域皇冠上的明珠,與ToF類型激光雷達在以下性能上有著明顯的區別。
(1)抗串擾及干擾能力
串擾可能來自其他車輛上的激光雷達、也可能來自自身車輛的其他其他激光雷達;干擾主要來自環境光。
ToF類型激光雷達發出去的激光脈沖和接收的激光脈沖,原本就是一束,波長一樣的。將來如果有特別多的車裝有激光雷達,行業標準一樣,那么就很難識別是自己發射出去激光脈沖的回波,還是其他車激光雷達發射的激光脈沖。
解決這個問題常見的做法是對每一束激光脈沖進行單獨編碼,保證不同激光雷達發射的脈沖是不可重復的、不可變化的真隨機發射脈沖序列,也就是每一束激光脈沖都是獨一無二的。不過,編碼會導致信噪比下降,進而犧牲測距能力。
此外,同一輛車上的兩個相鄰ToF類型激光雷達A和B,如果安裝位置比較湊巧,激光雷達A發射的激光脈沖經過漫反射之后被激光雷達B接收。這個時候也存在較小的概率使激光雷達B無法分辨是自己發射的激光脈沖的回波還是旁邊激光雷達A的回波。
對于此類問題,可以通過加裝時鐘同步模塊,將同一輛車上的所有激光雷達的掃描動作與同一個時鐘信號保持同步。在發射器發射一個激光脈沖后,在同步時鐘的計算下,探測器延后一定時間進行接收,隨后關閉。如果在此時間接收不到,則認為丟點。此方法能盡量避免相鄰雷達激光脈沖漫反射的影響。
與此同時,ToF類型激光雷達,基于直接探測的原理,直接測量激光脈沖的回波信號,探測器本身不具備區別進入探測器的回波是自身發出激光脈沖的回波還是環境光。因此當激光雷達視窗直面陽光,如果處理得不好,很容易在激光點云中出現雪花一樣的噪點。
如果對陽光更敏感的1550nm激光發射器開始大規模應用在ToF類型激光雷達后,這個問題將更加嚴重。這個問題可以從系統和算法兩個層面去優化,系統層面可以通過各種濾波片來對抗干擾,也可以把焦距做得更長使其接觸更少的陽光,但是將犧牲視場角;算法層面可以加入接收回波與發射脈沖的能量對比策略,忽略能量較小的陽光干擾。
而對于FMCW激光雷達,采用的是相干檢測技術,回波信號會被本振光(激光器留在本地的一部分激光)放大,這個放大倍數是非常高的,放大后的信號處理起來就非常方便。而且,FMCW利用的是一個很窄頻的激光器,頻率在100kHz量級,相當于要在百萬分之一納米這么窄的一個光譜上跟自己做混頻,其他跟這個頻率不吻合的信號都會過濾掉,同頻的情況只會發生在百萬分之一納米的范圍內,在今后即使很多車輛都搭載激光雷達的狀態下互擾的概率就非常低。
對于干擾,雖然環境光是廣譜的光,但FMCW只會接收自己發出去頻率相同或相近的光,FMCW激光雷達內置的光源的強度要比反射進來的陽光強度高至少三個數量級,因此,陽光對它的影響基本可以忽略不計。此外,FMCW激光雷達的濾波片很小很小(ToF激光雷達的濾波片帶寬有20-30納米,而FMCW激光雷達的濾波片帶寬則在0.01納米以內。),因此抗干擾能力很強。
(2)測速能力
FMCW基于多普勒效應,可以直接提供被測物體的實時速度信息。ToF雖然也可以輸出速度信息,但需要多幀距離信息去求導,帶來的延遲在一些場景下具有不可忽視的危害。
比如路邊車門突然打開,下來一個人,俗稱“開門殺”。ToF激光雷達則通常需要2-3秒才能識別出來,這個反應時間在緊急情況下,顯然有點長了。而對于FMCW激光雷達來說,一幀就可以識別出來。
還有一個場景,就是“鬼探頭”,車輛行駛過程中,前方行人突然從停著的車輛前出現,這個人的身體大部分都被車子擋住,只露了個頭出來,但即使是這么小的一個頭,FMCW也能馬上識別。
(3)信噪比
信噪比(Signal-to-noise Ratio,SNR),指的是系統中信號與噪聲的比。對于激光雷達來說,信噪比越高,意味著收到的回波信號中,有用成分越高,干擾分量越少。
上文已介紹,ToF激光雷達對其他激光雷達發出去的激光、環境光等都容易誤識別為自己發射出去激光的回波,因而信噪比低。而FMCW激光雷達基于相干檢測的方式,信噪比高3~4個數量級。
(4)遠距離測量能力
探測距離更遠,是FMCW激光雷達具有爭議的一項能力。
對于一款250m@10%探測能力的1550nm激光雷達來說,不是說250m外10%的被測物體全都探測不到,而是指原本要返回100個點云,現在僅返回了1個點云,考慮到ToF激光雷達的信噪比,這樣的點還是歸類為噪點濾掉比較好。
而對于1550nm FMCW激光雷達來說,雖然僅返回了一個點云,但是此點云帶有速度信息且考慮到FMCW激光雷達信噪比高,所以你是可以相信我這個點的。
這是FMCW可以不區分反射率達到500m探測能力的原因,但其實在我內心,僅憑一兩個帶速度信息的點就相信前面有物體,還是膽子大了一點。
(5)芯片化
芯片化被認為是激光雷達的終極產品形態,也是激光雷達廠商構筑起技術壁壘的護城河。在這一理想指引下,ToF激光雷達已經做了一些有益的嘗試,比如部分廠商已經將激光器和探測器分別芯片化,但如何將光學部件及掃描模塊也實現芯片化,是擺在行業面前的一道難題。
而FMCW激光雷達的最大的好處之一就是可以基于硅光技術實現集成,激光器、探測器、掃描模塊不僅可以芯片化,還有可能設計成一個SOC,理想狀態下甚至連光學部件也能實現芯片化,因此FMCW具有更徹底芯片化的潛質。
(6)成本
從長遠來看,FMCW更徹底的芯片化潛質,在大規模出貨后,將展現出巨大的成本優勢。但在當前,無論是1550nm激光器、光學元器件還是電子元器件的高成本,都讓FMCW激光雷達比ToF激光雷達更貴。
四、行業
FMCW激光雷達雖然具有遠大的前景,但受制于上下游技術瓶頸,目前尚未有量產的產品。目前走在研發前列的多為國外公司,包括Mobileye、Avea、Aurora(收購了Blackmore和OURS)等。
值得一提的是,Aeva在2022年2月發布(預計2024年量產)第三代FMCW激光雷達Aareis II,已經成功將激光器、探測器和光學部件集成到一塊只要硬幣大小的芯片上。
國內公司像洛微科技、光勺科技、擎感光子等也在積極布局。
06 主流激光雷達產品介紹
前面五篇文章,筆者詳細介紹了激光雷達不同技術路線的工作原理,而用這些技術路線組合出來的主流產品具有什么樣的性能,其實是主機廠更關心的話題。
從市場份額來看,禾賽科技、速騰聚創、圖達通無疑是激光雷達行業的頭部三熊,各家的主流產品AT128、RS-Lidar-M1和Falcon已經得到部分主機廠管理層的認可,本篇文章,筆者就對這三款產品進行一個基本介紹。
01 禾賽科技AT128
AT128是禾賽科技在2021年8月份推出的一款混合固態激光雷達產品,首發車型為2022年6月上市的理想L9。其核心的性能參數如表4所示。
表4 AT128核心性能參數

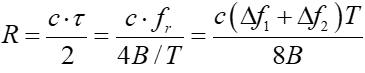
AT128人如其名,有128個貨真價實的激光器,我們知道,激光器成本在激光雷達整個成本里占大頭,別人用五六個,你用一百多個,成本上如何找到最優解呢。禾賽科技給出的解決方案是芯片化,通過半導體工藝將芯片陣列化,圖43藍色矩形框框起來的部分就是128個激光器的芯片陣列化方案。陣列化方案可以減少產線裝配時間、光路調整時間,從而提高生產效率、降低生產成本。
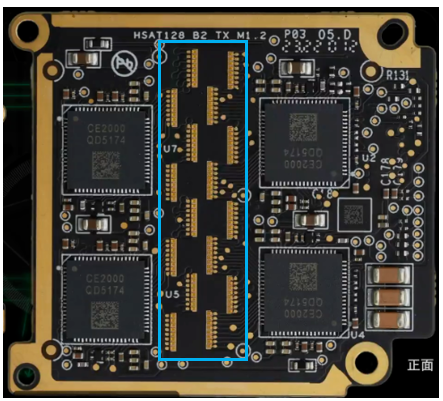
圖 AT128 激光器陣列化方案
目前半導體激光器有兩種,EEL和VSCEL,VSCEL激光器垂直襯底表面發光,特別適合利用半導體工藝實現大規模發光陣列。從部分自媒體的拆解報告來看,AT128里面使用的是Lumentum峰值功率為70W、波長為905nm的VCSEL激光器,型號應該是M51-100。
但是VCSEL的缺點是功率密度低,比EEL低一個數量級,而在功率密度低而想提高探測距離的就只能選用效率及靈敏度更高為探測器,為此AT128里選用的是SiPM探測器。
AT128掃描模塊為轉鏡方案,因為有實實在在的128個激光器,所以只需要一維轉鏡即可,負責水平視場角掃描。
02 圖達通Falcon
Falcon是圖達通和蔚來在2021年1月NIO Day上聯合推出的一款混合固態激光雷達產品,首發車型為2022年3月上市的蔚來ET7,其核心的性能參數如表3所示。
表5 Falcon核心性能參數

我們先從圖達通2019年在國內申請的一份專利《用于LIDAR系統的二維操縱系統》來整體了解一下這款激光雷達采用的技術路線。
如圖所示,整個系統包含光源706,掃描光學器件712,可旋轉多面棱體702和探測器712。
圖 專利《用于LIDAR系統的二維操縱系統》中附圖
光源和探測器數量可以是一個或多個,掃描光學器件可以是鏡式檢流計、旋轉鏡或光柵中的任意一種,主要作用是將光源發射的一個或多個光信號反射到旋轉多面棱體上。掃描光學器件采用傾斜的方式并以一定方向來掃描光源的一個或多個信號。
可旋轉多面棱體具有任意數量的反射面,可以是6/8/10/20……個。可旋轉多面棱體基于驅動電機繞著軸線703旋轉,以沿著垂直于旋轉軸線方向掃描從光源遞送過來的光信號。
掃描光學器件用來負責垂直方向掃描,可旋轉多面棱體負責水平方向掃描。發射出去的光信號在708區域內擊中對象發生散射后,返回的光信號返回到旋轉多面棱體上,反射回到掃描光學器件,并由透鏡710聚焦到探測器712上。
接下來我們就看一下部分自媒體的拆解分析。
從實物拆解來看,Falcon光源部分采用了一個1550nm的光纖激光器,這也是最遠500m,10%反射率下250m測距能力的基礎。掃描模塊采用振鏡+棱鏡的技術方案,振鏡(非MEMS微振鏡)在擺動電機的作用下負責垂直25°范圍內的掃描,棱鏡采用的是五邊形,在旋轉電機的作用下負責水平120°范圍內的掃描。
振鏡+棱鏡的組合也讓Falcon具有動態調節感興趣區域(Region of Interest,ROI)的能力,通過降低振鏡擺動電機在某一角度區間內的旋轉速度,可以讓垂直角度范圍內掃描點更密集,棱鏡的轉速雖然是恒定不變的,但是通過周期性提升激光器點頻,也能在特定的水平視場角內讓掃描電更密集,ROI掃描示意圖如圖所示。
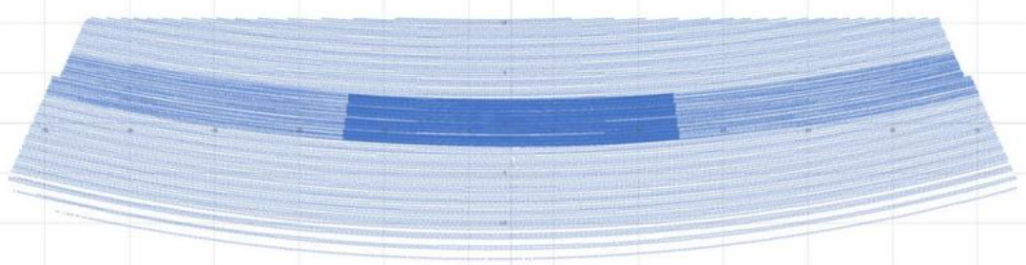
圖 Falcon ROI掃描示意圖(來源中信證券)
通過此種調節,ROI點云密度可以做到非ROI點云密度的6倍,ROI區域的角度分辨率也可以達到0.06°x0.06°。
由于光線激光器的功率密度足夠,Falcon探測器選用了普通的APD探測器,這也是該省省、該花花。
03 速騰聚創RS-Lidar-M1
M1是速騰聚創2018年1月在美國CES展上推出的一款混合固態激光雷達產品,只不過當時還是工程樣機階段,后經過兩年的打磨,SOP版本于2020年1月推出,首發車型為2022年9月上市的小鵬G9。其核心的性能參數如表3所示。
表6 M1核心性能參數

2021年是M1這顆激光雷達的高光時刻,到這一年的年底,共獲得約40余款車型定點,成為當時拿到車企前裝定點最多的激光雷達企業,后來禾賽科技AT128量產后,這一局面才被打破。下面筆者從民生電子拆機報告里,匯總一些M1核心零部件信息。
激光器類型為EEL,數量為5個,供應商為歐司朗。掃描模塊為MEMS微振鏡,鏡面尺寸5mm左右,供應商為希景科技。其掃描示意圖如圖46所示,由六個區域拼接而成。探測器類型為SiPM,供應商為安森美。處理器為賽靈思的FPGA方案,型號為:XAZU2EG。
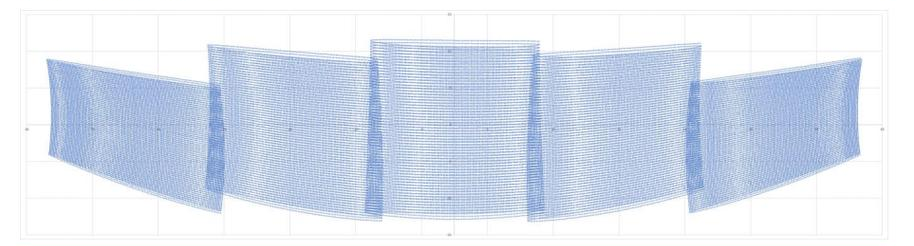
圖 MI掃描示意圖(來源中信證券)
04 總結
2024年1月份的美國CES展上,禾賽科技推出了物理512線超高清超遠距激光雷達AT512,速騰聚創發布了940nm超長距激光雷達M3,圖達通聯手Wideye推出了一種創新的車內激光雷達解決方案,法雷奧祭出了性能卓越的SCALA 3,Aeva推出首款可量產汽車級FMCW 4D激光雷達Atlas……
審核編輯:黃飛
















 工商網監
工商網監
評論