 電子發燒友App
電子發燒友App


當前最火的行業當屬新能源汽車,而新能源汽車一個最最最重要的特點就是——智能化,自動駕駛,智能感知可以說是新能源汽車的一個大大的買點。就比如最新發布的小米Su7,理想L6和問界M5,智能化就是其最大的賣點,而智能化除了軟件的支持外,還有一個最重要的部件就是雷達,激光雷達,毫米波雷達,超聲波雷達都是新能源汽車智能感知的重要組成部分。
在問界M5智駕版的介紹中,就應用到了1個高精度激光雷達,3個毫米波雷達和12個超聲波雷達組成。
(來自問界官網,HUAWEI ADS 2.0 高階智能駕駛系統,擁有 27 個感知硬件,由 1 個遠距高精度激光雷達 + 3 個毫米波雷達 + 2 顆 800 萬像素高感知前視攝像頭 + 9 顆側視、環視、后視攝像頭 + 12 個超聲波雷達所組成,配合高性能計算平臺 + 華為擬人化算法加持,一躍成為高階智能駕駛的新典范。)
那么什么是毫米波雷達?他究竟有哪些神奇之處?我們今天一起來學習一下。
No.1?
什么是雷達?
我們習慣了雷達這個詞,其實雷達是一個外來詞,一個音譯詞,來源于英語Radar,發音/?re?.dɑ?r/,而雷達也不是在英語中一開始就有的,它是一個首字母縮寫詞,全稱為 Radio Detection and Ranging,也就是無線電探測與測距。這也是雷達這個詞的基本意義,利用無線電來發現目標和測量距離。
隨著技術的發展,雷達的應用和功能早已超脫了探測和測距這個基本范圍,比如測速,測角,目標識別,目標成像,戰場偵察等等。但是只要用到電磁波來進行探測的技術,我們依然稱為雷達。
所以雷達,它不姓雷,他姓Radio,也就是無線電波,應用最為廣泛的電磁波頻段。
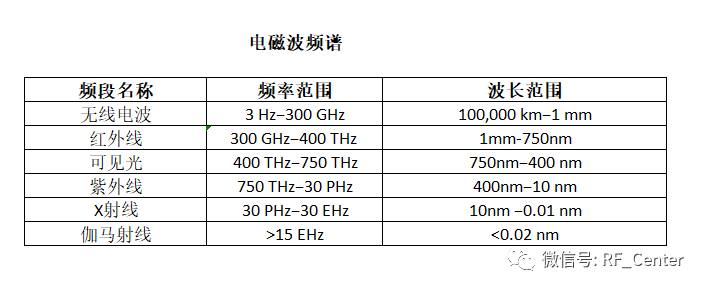
電磁波的頻譜如下,除了無線電波Radio之外還有紅外線,可見光,紫外線以及更高頻的x射線和伽瑪射線。
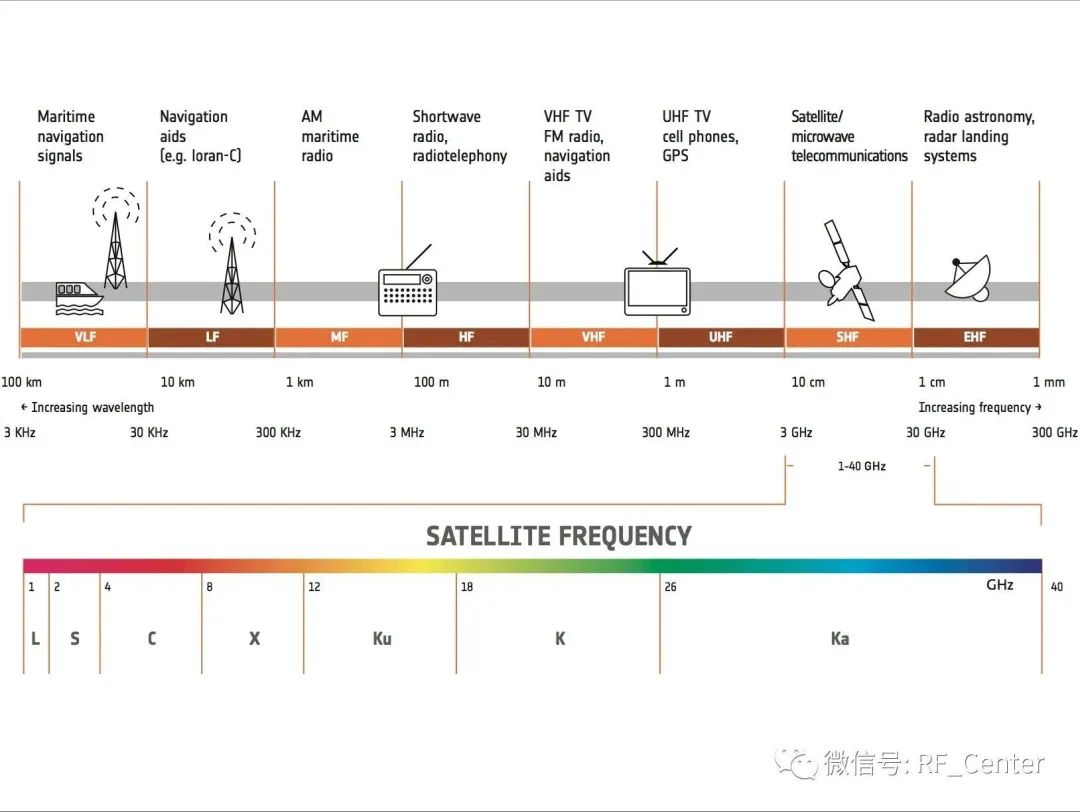
而無線電波中根據電磁波波長,又可分為長波,短波,米波,厘米波,毫米波以及亞毫米波,如下圖所示。
那么毫米波雷達,就是利用無線電波里的毫米波來進行探測和測距的裝置,電磁波波長為10mm到1mm,對應的頻率為30GHz到300GHz。除了毫米波雷達,還有厘米波雷達,以及米波雷達。
雷達的工作原理如下圖所示
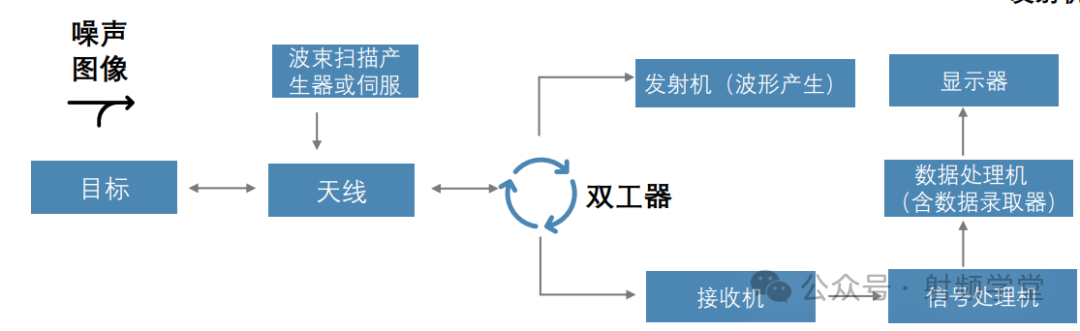
發射機產生的雷達信號經由天線發射出去,目標截獲并反射一部分雷達信號,有一部分反射信號被雷達接收機接收,雷達天線收集回波信號,經接收機放大 和濾波處理后發送至信號處理機和數據 處理機進行處理,最終輸入到顯示器上。
雷達按照不同的維度可以分為不同類別,比如按照電磁波信號類型可分為脈沖雷達,連續波CW雷達和調頻連續FMCW波雷達。
按照使用場景又可分為軍用雷達和民用雷達;
按照天線配置可分為單站雷達,雙基地雷達和電子掃描陣列雷達;
按照載波又可分為厘米波雷達,毫米波雷達,激光雷達,寬帶雷達等;
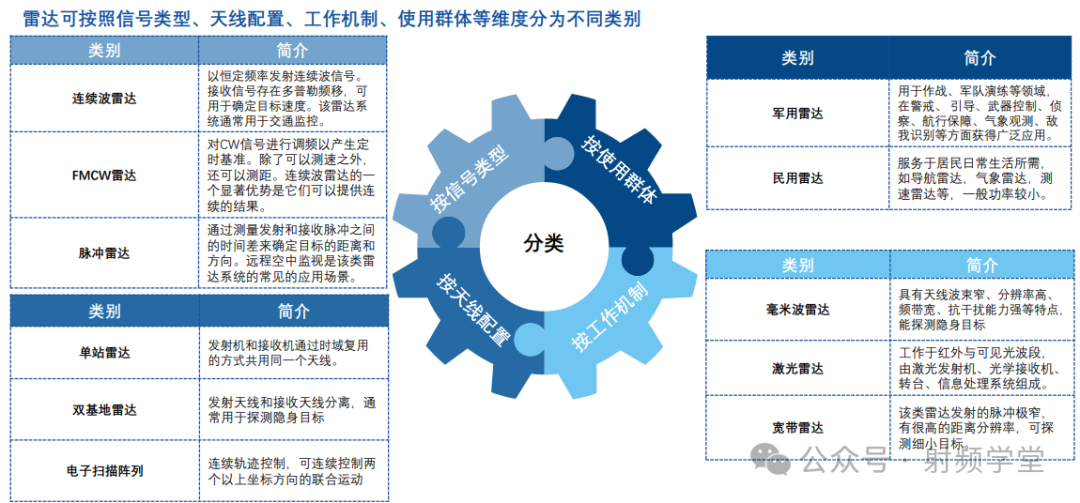
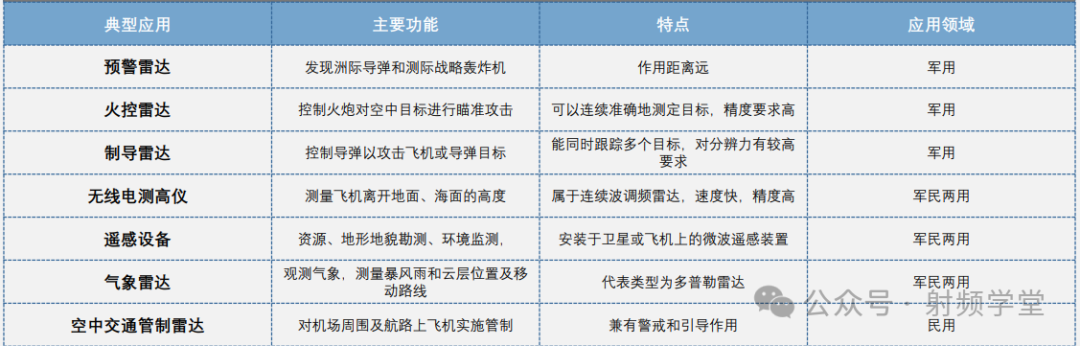
不同的雷達,其功能和應用場景也不同。
No.2?
雷達的歷史
講到雷達,就不得不提電磁波的歷史。
這種看不到摸不著的東西,確實讓人們煞費苦心,要不是天才科學家麥克斯韋的預言,我想,有可能現在我們還處于通信基本靠吼的時代。
磁的應用比較早,我們的祖先黃帝就是用了磁鐵制造了司南,打敗了蚩尤;而典的認知更多的是早期人們對閃電的恐懼;電和磁在奧斯特的實驗中發生了第一次握手,而后在法拉第的電磁實驗中產生了更緊密的耦合,一直到天才物理學家麥克斯韋推導出了麥克斯韋方程組,電和磁才真正走到了一起,進而推導出了電磁波的存在。
一直到1885年-1889年,赫茲通過一系列實驗證明了電磁波的存在,并成功測量了電磁波的波長和速度,電磁波才真真正正的走入人們的視野,也逐漸進入人們的生活,直到今天,不可替代。
我們都知道回聲的原理,當我們對著高大的建筑物或者大山大聲說話的時候,我們的聲波會被建筑物反射回來,形成回聲。利用回聲的時差,人們可以粗略的估算大山的距離。
所以,當赫茲證實電磁波的存在之后,研究者最先用到的就是電磁波的反射波原理來測量距離。
1904年,德國工程師斯蒂安·胡爾斯邁爾(Christian Hülsmeyer)正是基于赫茲的原理,發明了障礙物探測器和船舶導航裝置,也就是最早的雷達,發明示意圖如下圖所示。
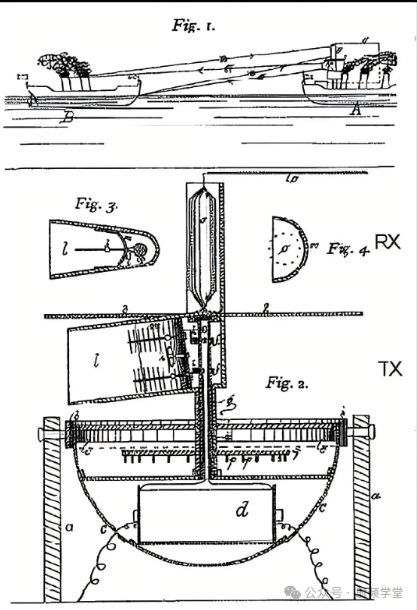
胡爾斯邁爾還建造了一座”雷達“,并公開演示了這個神奇的裝置,并且成功將電磁波信號發射到一艘正在靠近的船上,并且成功接收到了反射信號。
只可惜,那個時候還相對和平,沒有什么人對他的設備感興趣。
直到1927年,Hans E Hollmann 博士進一步研究了該設備,并建造了第一個厘米波長的發射器和接收器,這就是第一個“微波”通信系統。漢斯-卡爾·馮·威爾森(Hans-Karl?von Willsen)與霍爾曼(Hollmann)和第三位科學家岡瑟·埃爾布斯洛(Gunther Erbsloeh)合作,完善了一種設備,可以探測到大約8公里外的船只和大約30公里外在500米高空飛行的飛機。海洋系統被稱為“Seetakt”,陸地系統被稱為“Freya”——這三個系統可以說是創造了我們最常與雷達聯系在一起的應用——探測和評估物體的距離。
真正的雷達就誕生了,伴隨著第二次世界大戰,雷達的技術和應用都得到了飛速的發展。
直到今天,最先進的雷達技術仍然是服務于戰爭的需要。
而隨著自動駕駛技術的發展,毫米波雷達也成為了民用最廣泛的一種雷達設備。
No.3
毫米波雷達的原理
毫米波雷達,就是利用毫米波來進行探測的裝置,我們先來說一下毫米波的優點和缺點。
毫米波的工作波長在10mm到1mm之間,對應的工作頻率為30GHz到300GHz,是處于微波和光波之間的一段電磁波頻譜,所以呢,毫米波雷達兼具微波和光波的雙重優點,總結如下:
| 小天線口徑、窄波束:高跟蹤和引導精度;易于進行低仰角跟蹤,抗地面多徑和雜波干擾;對近空目標具有高橫向分辨力;對區域成像和目標監視具備高角分辨力;窄波束的高抗干擾性能;高天線增益;容易檢測小目標,包括電力線、電桿和彈丸等。 |
| 大帶寬:具有高信息速率,容易采用窄脈沖或寬帶調頻信號獲得目標的細節結構特征;具有寬的擴譜能力,減少多徑、雜波并增強抗干擾能力;相鄰頻率的雷達或毫米波識別器工作,易克服相互干擾;高距離分辨力,易得到精確的目標跟蹤和識別能力。 |
| 高多普勒頻率:慢目標和振動目標的良好檢測和識別能力;易于利用目標多普勒頻率特性進行目標特征識別;對干性大氣污染的穿透特性,提供在塵埃、煙塵和干雪條件下的良好檢測能力。 |
| 良好的抗隱身性能:當前隱身飛行器上所涂覆的吸波材料都是針對厘米波的。根據國外的研究,毫米波雷達照射的隱身目標,能形成多部位較強的電磁散射,使其隱身性能大大降低,所以,毫米波雷達還具有反隱身的潛力。 |
當然也有其劣勢,比如雨、霧和濕雪等高潮濕環境的衰減,以及大功率器件和插損的影響降低了毫米波雷達的探測距離;樹叢穿透能力差,相比微波,對密樹叢穿透力低;元器件成本高,加工精度相對要求高,單片收發集成電路的開發相對遲緩。
取其有點,去其糟粕,毫米波雷達的應用主要在:
| 高精度多維搜索測量:進行高精度距離、方位、頻率和空間位置的測量定位; |
| 雷達安裝平臺有體積、重量、振動和其它環境的嚴格要求:毫米波雷達天線尺寸小、重量輕,容易滿足便攜、彈載、車載、機載和星載等不同平臺的特殊環境要求; |
| 目標特征提取和分類識別:毫米波雷達高分辨力、寬工作頻帶、大數值的多普勒頻率響應、短的波長易獲得目標細節特征和清晰輪廓成像等特點,適于目標分類和識別的重要戰術要求; |
| 小目標和近距離探測:毫米波短波長對應的光學區尺寸較小,相對微波雷達更適于小目標探測。除特殊的空間目標觀測等遠程毫米波雷達外,一般毫米波雷達適用于30 km 以下的近距離探測; |
| 抗電子戰干擾性強:毫米波窗口可用頻段寬,易進行寬頻帶擴頻和跳頻設計。同時針對毫米波雷達的偵察和干擾設備面臨寬頻帶、大氣衰減和窄波束等干擾難題,毫米波雷達相對微波雷達具有更好的抗干擾能力。 |
所以呢,毫米波雷達在導彈制導,炮火控制,等軍事領域得到了廣泛的應用,同樣配合激光雷達和攝像頭的應用,毫米波雷達在智能汽車和自動駕駛上也得到了廣泛的應用。
毫米波雷達在智能汽車上的應用,主要在測距,測速和測角三個方面。以 FMCW 雷達系統為例,其基本功能實現原理為:
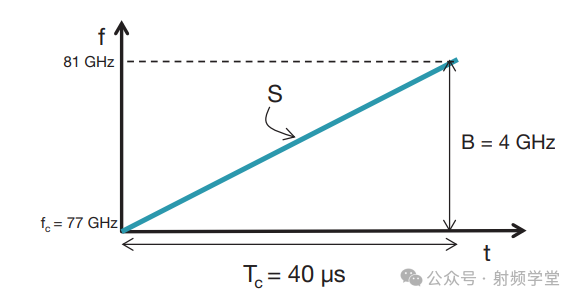
FMCW雷達的信號的頻率隨時間線性上升,如下圖所示,這種類型的信號也稱為線性調頻脈沖。
下圖是FMCW信號的波形,振幅A和隨時間的變化。
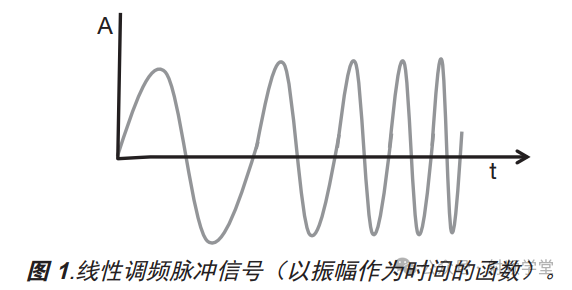
如果以頻率作為時間的函數的話,其波形如下圖所示:
MCW 雷達系統發射線性調頻脈沖信號,并捕捉其發射路徑中的物體反射的信號。其發射頻率和接收頻率隨時間的函數如下圖所示
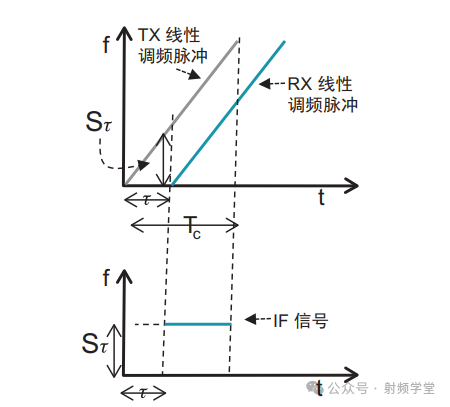
那么利用這個時間差,就能夠快速得到目標的距離。
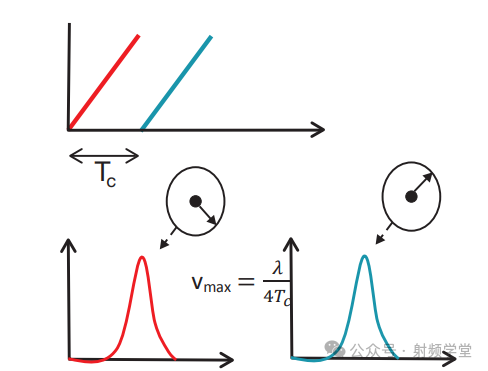
同樣道理,我們利用兩個FMCW信號就可以得到目標的速度。
FMCW雷達利用水平面也可以估算反射信號的角度,如下圖所示,這個角度也叫做達到角(AoA)
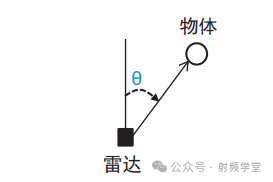
當然,對于移動的物體,在計算中要考慮多普勒效應。
No.4
車載毫米波雷達
車載毫米波雷達目前常用的工作頻率有24GHz、60GHz、77GHz、80GHz,頻率越高,波長越短,其精度也就越高。
在華為官網上有介紹一款ASN850毫米波感知雷達,工作頻率在80GHz,探測距離大于1000米,探測寬度可達到10車道,詳細的性能指標如下圖所示。
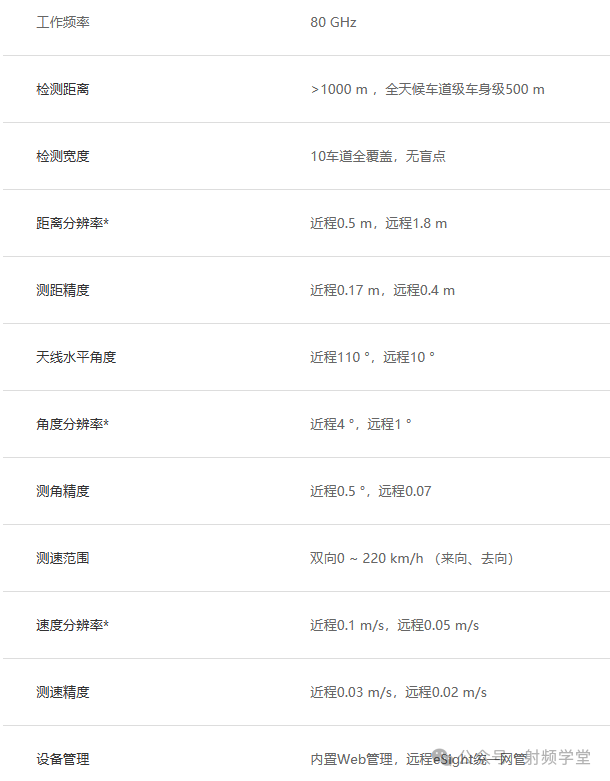
像上文提到的測距,測速,測角這三種功能,在這款雷達上都具備,行業內也稱這種類型的雷達為3D雷達,但是沒有高度信息,這個在智能駕駛中也會引起誤判,也是傳說中特斯拉當初棄用毫米波雷達的原因之一。
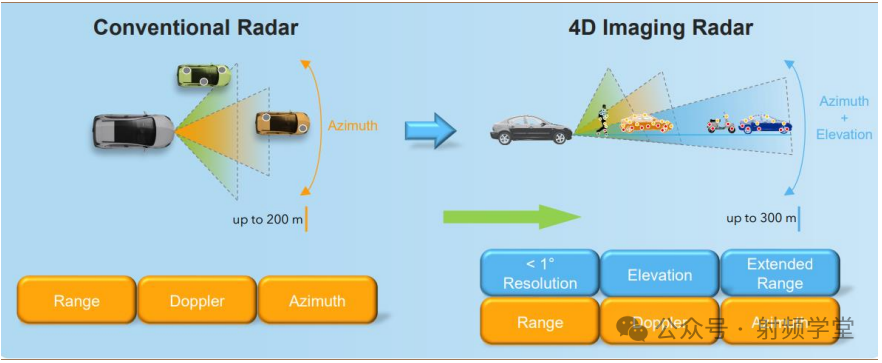
不過隨著技術的發展,4D雷達開始顯露頭角,在傳統的測距,測速,測角的基礎上,加上了測高度的功能。
相比傳統毫米波雷達僅能判斷出前方有障礙物,4D毫米波雷達增加了縱向天線及處理器,可以接收更多信息返回點,并像激光雷達一樣呈點云圖,能呈現出更多細節信息,探測出障礙物的形狀,彌補了傳統雷達難以識別靜態障礙物的短板。
基于TI的AWR2243芯片的4D雷達城市道路交通參與者目標分類與檢測研究,包括同濟大學測試場采集的目標檢測與分類數據集可視化結果表明,4D雷達可以輸出有高度的目標點云,反映目標的輪廓外形。雖然與激光雷達點云成像原理不同,僅從毫米波雷達的點云還無法準確判斷一個目標額外形等特征,但是其點云的散射特征具備一定規律。
隨著4D成像雷達技術的發展,毫米波雷達在智能駕駛中的應用也越來越廣泛。
審核編輯:黃飛
?
















 工商網監
工商網監
評論