
















| 自動控制系統(tǒng)的設計 |
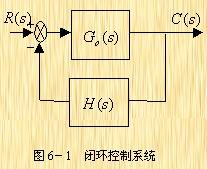
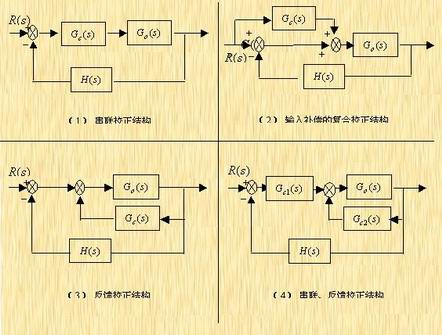
| 6.1 控制系統(tǒng)設計的基本思路 |
|
|

Maxim MAX17270開發(fā)板,創(chuàng)新SIMO和Nanopower電源技術,助您輕松實現(xiàn)低功耗和小尺寸的最佳平衡。【立即試用】
• 61份資料+6場技術演講,學習抽獎兩不誤
• 學習新知、下載資料,贏取精美禮品!
• 答題贏入門套件!
• 輕松實現(xiàn)低功耗和小尺寸的最佳平衡
| 自動控制系統(tǒng)的設計 |
| 6.1 控制系統(tǒng)設計的基本思路 |
|
|
推薦閱讀
每月人物

正面迎戰(zhàn)智慧家庭:從稱體重到“稱”健康,芯海智慧測量全包
隨著科技的發(fā)展,人們對生活質(zhì)量的追求越來越高,傳統(tǒng)的家庭生活方式已經(jīng)無法滿足現(xiàn)代人的家居生活,智慧家庭的新型生活理念成為很多人夢寐以求的...

依托AI平臺,涂鴉智能開啟全屋智能2.0時代!
隨著物聯(lián)網(wǎng)技術的突飛猛進,生活中越來越多的家庭設備將會聯(lián)上網(wǎng)絡,變得“智慧”起來,智慧家庭的概念成了這幾年媒體、企業(yè)、用戶關注的焦點,而...
每周排行
創(chuàng)新實用技術專題
商務及廣告合作
Jeffery Guo
jeffery@elecfans.com
新聞投稿
David Mok
moyanfen@elecfans.com
關注我們的微信

供應鏈服務 PCB/IC/PCBA
江良華
lanhu@hqchip.com
投資合作
曾海銀
zenghaiyin@elecfans.com
版權所有 ? 深圳華強聚豐電子科技有限公司
電子發(fā)燒友 ( 電路圖 ) 粵ICP備14022951號
粵公網(wǎng)安備 44030402000349號 電信與信息服務業(yè)務經(jīng)營許可證:粵B2-20160233
 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)









用戶評論
共 0 條評論