` 本帖最后由 13chfang 于 2015-7-31 17:07 編輯
STM32主控,全部題目完成。最近也在參加最近國(guó)賽培訓(xùn),用了三天時(shí)間把13年的倒立擺的全部題目做了出來(lái),貢獻(xiàn)一下源代碼給各位參考~主要還是pid的參考~`
2015-07-30 16:09:33
基于STM32F407設(shè)計(jì)并制作一套簡(jiǎn)易旋轉(zhuǎn)倒立擺及其控制裝置。旋轉(zhuǎn)倒立擺的結(jié)構(gòu)如圖 1 所 示。電動(dòng)機(jī) A 固定在支架 B 上,通過(guò)轉(zhuǎn)軸 F 驅(qū)動(dòng)旋轉(zhuǎn)臂 C 旋轉(zhuǎn)。擺桿 E 通過(guò)轉(zhuǎn)軸 D 固定
2019-08-26 20:45:23
2015 年全國(guó)大學(xué)生電賽題——風(fēng)力擺控制系統(tǒng)(B 題) 一、系統(tǒng)設(shè)計(jì)方案論證1. 預(yù)期目標(biāo)1)主控芯片選擇2)傳感器選擇3)電機(jī)選擇4)連接桿選擇5)驅(qū)動(dòng)芯片選擇6)人機(jī)交互系統(tǒng)1.1.2 分析
2021-07-23 06:23:18
2015全國(guó)電子設(shè)計(jì)大賽,風(fēng)力擺控制系統(tǒng)的題目
2015-08-12 10:06:48
2015年全國(guó)電子設(shè)計(jì)競(jìng)賽 控制類題目《風(fēng)力擺控制系統(tǒng)》
2017-09-01 09:42:26
正在做一個(gè)環(huán)形倒立擺(C51單片機(jī)控制)!!遇到問(wèn)題如下 請(qǐng)大家指點(diǎn)迷津{:1:};我用的是10位絕對(duì)型倒立擺 ,有10條數(shù)據(jù)線,輸出格雷碼. 請(qǐng)問(wèn)這10條數(shù)據(jù)線是否直接與單片機(jī) IO口相連,連完之后又該如何對(duì)這組格雷碼進(jìn)行檢測(cè)并輸出二進(jìn)制數(shù)!!{:21:}大神大神 請(qǐng)幫助一下
2014-07-28 22:03:58
目錄一、倒立擺系統(tǒng)簡(jiǎn)介二、二級(jí)倒立擺模型構(gòu)建三、二級(jí)倒立擺的線性化模型四、二級(jí)倒立擺的狀態(tài)空間模型一、倒立擺系統(tǒng)簡(jiǎn)介倒立擺控制系統(tǒng)作為實(shí)驗(yàn)裝置在控制理論領(lǐng)域的教學(xué)與科研工作中擔(dān)任著不可或缺的角色
2021-09-01 07:14:57
國(guó)賽c題的倒立擺題目,大家是選什么材料當(dāng)轉(zhuǎn)軸D的?滑輪?滑輪會(huì)不會(huì)太滑,不好控制?還有什么其他好的材料用轉(zhuǎn)軸的?
2013-09-05 13:54:37
什么是倒立擺?倒立擺該如何去實(shí)現(xiàn)呢?
2021-12-23 06:18:33
五部分組成?各部分的作用是什么? 2. 簡(jiǎn)述四類常見(jiàn)的微型計(jì)算機(jī)控制系統(tǒng)的特點(diǎn)及其應(yīng)用領(lǐng)域。 3. 計(jì)算機(jī)控制系統(tǒng)的發(fā)展趨勢(shì)是什么? 4. 操作指導(dǎo)、DDC和SCC系統(tǒng)工作原理如何?它們之間有何區(qū)別和聯(lián)...
2021-09-01 06:49:33
`風(fēng)力擺控制系統(tǒng)賽題解析及源代碼開(kāi)源BoXDesign參加過(guò)2015年全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽做風(fēng)力擺控制系統(tǒng)的小伙伴們一定對(duì)這道題目印象深刻,不管是成功還是失敗,各位肯定都是收獲不少。看了網(wǎng)上各位
2015-10-30 20:42:51
本帖最后由 wherelse 于 2017-6-30 15:46 編輯
板子在手上也有一個(gè)多月了,在經(jīng)過(guò)充分的熟悉之后,準(zhǔn)備開(kāi)始著手準(zhǔn)備倒立擺項(xiàng)目了。倒立擺作為倒立擺控制系統(tǒng)是一個(gè)復(fù)雜
2017-06-29 15:59:40
其操作及其庫(kù)函數(shù),驗(yàn)證其性能,我選擇了倒立擺這個(gè)經(jīng)典的控制系統(tǒng)。項(xiàng)目中用到的資源: 定時(shí)器——Neutron提供最多十個(gè)由FreeRTOS接管的定時(shí)器。ADC模數(shù)轉(zhuǎn)換——Neutron精度為12位
2017-07-14 17:31:27
項(xiàng)目名稱:基于陀螺儀與ADC的旋轉(zhuǎn)倒立擺試用計(jì)劃:1. 開(kāi)箱評(píng)測(cè)初步介紹該開(kāi)發(fā)板的外設(shè)及基礎(chǔ)功能,以及硬件配置資源,并完成點(diǎn)亮一個(gè)LED燈;2. 各個(gè)功能模塊初步使用體驗(yàn),嘗試使用溫濕度、氣壓傳感器
2017-05-08 17:39:04
一級(jí)倒立擺的Simulink仿真 單級(jí)倒立擺穩(wěn)定控制 直線一級(jí)倒立擺系統(tǒng)在忽略了空氣阻力及各種摩擦之后,可抽象成小車和勻質(zhì)擺桿組成的系統(tǒng),如圖1所示。m g?桿長(zhǎng)為 ?2u圖1 直線一級(jí)倒立擺系統(tǒng)圖
2021-09-01 06:45:42
前一段時(shí)間參加了電子設(shè)計(jì)大賽,做的是旋轉(zhuǎn)倒立擺,在網(wǎng)上看了看別人的作品,大多數(shù)都是簡(jiǎn)單的一級(jí)倒立擺,現(xiàn)在想嘗試一下做二級(jí)倒立擺。看了看該款主控芯片的資源,能滿足該作品的需求,所以最終決定做二級(jí)倒立擺,懇請(qǐng)組委會(huì)審核!
2013-10-28 10:02:39
計(jì)算機(jī)控制技術(shù)練習(xí)題計(jì)算機(jī)控制系統(tǒng)有哪幾部分組成?什么是DDC控制系統(tǒng)?簡(jiǎn)述SCC控制系統(tǒng)的兩種結(jié)構(gòu)形式。什么是集散控制系統(tǒng)?現(xiàn)場(chǎng)總線控制系統(tǒng)的特點(diǎn)是什么?目前流行的計(jì)算機(jī)控制系統(tǒng)的控制規(guī)律有哪幾種
2021-09-01 08:30:08
你們做倒立擺時(shí)對(duì)倒立擺進(jìn)行建模了嗎?感覺(jué)數(shù)學(xué)水平不夠,建模有點(diǎn)難。但是做倒立擺時(shí)對(duì)PID的整定不建模怎么辦,就通過(guò)不斷的試嗎?有在搞這個(gè)的么,求經(jīng)驗(yàn)!!
2015-07-29 18:29:44
最近小弟在做一個(gè)小車倒立擺的結(jié)構(gòu),但是電機(jī)要通過(guò)計(jì)算去選取,大佬們有什么好的建議嗎?另外還想做一下機(jī)械運(yùn)動(dòng)仿真,因?yàn)閷?shí)在是不懂,所以請(qǐng)問(wèn)用proe能做出倒立擺結(jié)構(gòu)的運(yùn)動(dòng)仿真嗎?
2020-04-23 00:52:59
留在學(xué)校要做一個(gè)15年電賽的題目,選擇了風(fēng)力擺控制系統(tǒng),但是沒(méi)有什么基礎(chǔ),從頭開(kāi)始學(xué)起,想問(wèn)問(wèn)有沒(méi)有人可以講解一下。基本題目和需要器件已了解,無(wú)從下手
2017-07-09 16:54:50
在調(diào)節(jié)倒立擺時(shí)如何將精密電位器的角度值與電機(jī)的pwm調(diào)節(jié)聯(lián)系起來(lái),想通過(guò)增量式pid算法調(diào)節(jié)倒立擺。還有,pid參數(shù)調(diào)節(jié)有沒(méi)有相關(guān)軟件,麻煩推薦一下。O(∩_∩)O謝謝!!!
2017-07-27 10:47:46
倒立擺分析、建模與仿真引言倒立擺是機(jī)器人學(xué)中一個(gè)非常重要的模型,火箭、導(dǎo)彈、雙足機(jī)器人、四足機(jī)器人,基本都是倒立擺的變形。問(wèn)題描述關(guān)于倒立擺的問(wèn)題描述如下:如圖所示的倒立擺系統(tǒng)。擺的關(guān)節(jié)連接在一個(gè)可
2021-09-07 06:59:42
本人目前正在打算設(shè)計(jì)一個(gè)基于瑞薩M16C62P單片機(jī)的倒立擺程序。這個(gè)程序完成后的成果有點(diǎn)類似如下視頻:http://v.youku.com/v_show/id_XMzczMjgwMTI0.html
2013-01-30 00:38:42
最近需要設(shè)計(jì)單級(jí)倒立擺,可是對(duì)此一竅不通,有知道或者設(shè)計(jì)過(guò)的的大神么?求指導(dǎo)!!!
2014-03-22 18:50:20
地質(zhì)大學(xué)2013年全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽簡(jiǎn)易倒立擺解析,很不錯(cuò),贊一個(gè)
2014-08-01 15:07:02
倒立擺制作全過(guò)程最近在練習(xí)pid的控制算法,就選用了2013年的電子設(shè)計(jì)國(guó)賽題目:倒立擺。首先給你們看看我的成果注意哦:倒立擺不是靠上面黃色的傳感器保持平衡的,而是通過(guò)下面的電機(jī)左右扭動(dòng)使得擺桿不掉
2022-01-14 07:22:02
本帖最后由 qiuzhichang 于 2015-4-12 12:56 編輯
基于固高公司運(yùn)動(dòng)控制卡的倒立擺完整控制程序,包括括了界面、實(shí)時(shí)曲線顯示、算法等
2013-09-06 09:08:22
求基于自由擺的平板控制系統(tǒng)的資料,謝了
2015-08-02 08:18:02
目錄物理設(shè)置創(chuàng)建世界框架和基本配置組裝底盤和推車擺放在一對(duì)手推車連接到擺選擇用于控制器和角度轉(zhuǎn)換的輸出為擺錘和手推車創(chuàng)造原型閉環(huán)設(shè)置控制器實(shí)施物理設(shè)置在本節(jié)中,我們將展示如何使用Simscape
2021-07-07 06:16:10
同時(shí)控制小車的位置,實(shí)驗(yàn)觀測(cè)不便等問(wèn)題,提出并設(shè)計(jì)了基于固高公司起擺控制、最優(yōu)小車位置控制、嵌入學(xué)生擺桿偏角控制的組合式控制系統(tǒng)。在線仿真實(shí)驗(yàn)表明,組合式控制系統(tǒng)對(duì)直線一級(jí)倒立擺的控制有效,能滿足本科自動(dòng)控制原理課程沒(méi)計(jì)及實(shí)驗(yàn)的安全、自動(dòng)、直觀、迅捷、可靠的要求。
2020-04-01 07:11:00
怎么用單片機(jī)很好控制倒立擺呢
2015-08-01 15:38:31
1 緒論1.1倒立擺系統(tǒng)簡(jiǎn)介倒立擺系統(tǒng)是一種很常見(jiàn)的又和人們的生活密切相關(guān)的系統(tǒng),它深刻揭示了自然界一種基本規(guī)律,即自然不穩(wěn)定的被控對(duì)象,通過(guò)控制手段可使之具有良好的穩(wěn)定性。倒立擺系統(tǒng)是一個(gè)非線性
2021-09-15 07:23:55
做畢設(shè),想用stc89c51做倒立擺,再網(wǎng)上搜了很多資料都沒(méi)找到,希望哪位大俠能幫幫我{:23:}{:19:}{:22:}
2014-05-02 19:41:25
旋轉(zhuǎn)倒立擺數(shù)學(xué)建模的作用和在程序中怎樣體現(xiàn)出來(lái)的
2015-07-21 23:33:25
有木有大俠旋轉(zhuǎn)倒立擺的PID算法的MATLAB仿真原理圖
2013-09-06 11:06:36
我想做倒立擺,可是有好多問(wèn)題不懂,有沒(méi)有大神指導(dǎo)一下
2014-05-15 17:22:04
有誰(shuí)做過(guò)基于自由擺的平板控制系統(tǒng)交流交流、QQ: 651339660
2013-05-14 15:12:58
模糊控制倒立擺程序
2018-10-04 10:42:46
需設(shè)計(jì)基于單片機(jī)的單級(jí)倒立擺模糊控制系統(tǒng)設(shè)計(jì)!望大神指導(dǎo)
2014-03-26 17:04:32
#具體操作寫好倒立擺程序的關(guān)鍵是確定pid算法的程序和參數(shù)值。我根據(jù)網(wǎng)上查找的資料寫了用stm32F407控制倒立擺的pid程序,現(xiàn)在我將程序分享給大家。我的程序主要是根據(jù)位置式離散pid公式pwm
2022-01-14 07:33:37
一、倒立擺系統(tǒng)的研究目的和意義倒立擺控制系統(tǒng)(InvertedPendulumSystem簡(jiǎn)稱IPS)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是進(jìn)行控制理論教學(xué)及開(kāi)展各種控制實(shí)驗(yàn)的理想實(shí)驗(yàn)平臺(tái)。倒立擺
2021-09-01 07:04:20
簡(jiǎn)易旋轉(zhuǎn)倒立擺及控制裝置中如何使直流電機(jī)加快轉(zhuǎn)速?
2013-09-04 16:01:18
簡(jiǎn)易旋轉(zhuǎn)擺倒立控制裝置報(bào)告中的擺桿狀態(tài)檢測(cè),是要測(cè)什么啊?!具體點(diǎn)
2013-09-05 10:10:13
萌新求助,求大佬分享一級(jí)倒立擺MATLAB仿真程序
2021-11-01 07:32:44
請(qǐng)問(wèn)一下倒立擺系統(tǒng)的原理是什么?
2021-10-29 07:05:38
誰(shuí)做過(guò)基于自由擺的平板控制系統(tǒng)!!!交流交流qq:651339660
2013-07-23 21:53:43
誰(shuí)有2013年的倒立擺的相關(guān)資料,最好是430主控的,能提供一個(gè),不勝感謝啦
2015-03-09 10:46:00
想學(xué)習(xí)倒立擺,誰(shuí)有程序借來(lái)學(xué)習(xí)學(xué)習(xí)
2015-06-09 08:29:17
課程設(shè)計(jì)分析題目:風(fēng)力擺控制系統(tǒng)一、 題目要求1.基本要求2.設(shè)計(jì)要求二.設(shè)計(jì)難點(diǎn)三.控制方案示意思路分析硬件選擇一、主控1.選擇一 STC15W408AS2.選擇二 STM32F103C8T6二
2021-09-13 07:01:52
設(shè)計(jì)一個(gè)受風(fēng)力驅(qū)動(dòng)的自由擺控制系統(tǒng),其結(jié)構(gòu)如圖 設(shè)計(jì)一個(gè)受風(fēng)力驅(qū)動(dòng)的自由擺控制系統(tǒng),其結(jié)構(gòu)如圖 1所示。 直流電機(jī) 在單片控制下,帶動(dòng)葉片旋轉(zhuǎn),在風(fēng)力作用下,擺轉(zhuǎn)動(dòng),其角度 θ 與風(fēng)力大小有關(guān)。
2014-03-22 19:02:41
本文以倒立擺控制系統(tǒng)控制為例,介紹Borland C++ Builder 在數(shù)據(jù)采集、處理中的應(yīng)用,并根據(jù)系統(tǒng)控制算法控制電機(jī)左右運(yùn)動(dòng),從而保證倒立擺能穩(wěn)定地站立在豎直位置。關(guān)鍵詞: C
2009-06-15 09:26:31 27
27 針對(duì)單級(jí)倒立擺系統(tǒng)的單輸入雙輸出、強(qiáng)非線性、強(qiáng)耦合的不穩(wěn)定系統(tǒng),提出了雙回路PID 控制方案。通過(guò)仿真試驗(yàn)研究了雙回路PID 多種組合控制方案的可行性,并選出最佳方案——
2009-06-17 09:34:2833 本文介紹了一種基于SPCE061A 單片機(jī)的二級(jí)倒立擺控制系統(tǒng)。主要闡述了狀態(tài)空間法在本系統(tǒng)中的應(yīng)用以及功能設(shè)計(jì),并簡(jiǎn)要介紹了系統(tǒng)的軟件設(shè)計(jì)思路。關(guān)鍵詞:?jiǎn)纹瑱C(jī); 狀
2009-08-04 08:42:0925 針對(duì)倒立擺的非線性采用T-S模糊控制的方法對(duì)倒立擺進(jìn)行控制,建立了倒立擺的數(shù)學(xué)模型,并用Matlab 進(jìn)行了仿真,仿真結(jié)果表明該控制方法對(duì)倒立擺具有好的控制效果。關(guān)鍵
2009-08-10 09:39:3215 倒立擺控制系統(tǒng)是一個(gè)典型的高階次、不穩(wěn)定、多變量、非線性和強(qiáng)藕合控制系統(tǒng)。本文研究對(duì)象是基于研華公司數(shù)據(jù)采集卡PCI—1710—B 的倒立擺控制系統(tǒng)。通過(guò)對(duì)一級(jí)倒立擺系統(tǒng)
2009-08-15 08:13:4525 選用 LabVIEW 作為倒立擺控制系統(tǒng)的界面設(shè)計(jì)開(kāi)發(fā)工具。為了在LabVIEW 圖形化編程環(huán)境下使用倒立擺控制器Windows 環(huán)境下的動(dòng)態(tài)鏈接庫(kù),本文將動(dòng)態(tài)鏈接庫(kù)中的函數(shù)全部轉(zhuǎn)換設(shè)計(jì)為在LabV
2009-08-26 09:40:3527 提出了利用TS-PID 對(duì)單級(jí)小車倒立擺進(jìn)行控制的方法,并且對(duì)TS-PID 控制器進(jìn)行了簡(jiǎn)要的理論分析,最后利用matlab 的simulink 工具對(duì)該控制系統(tǒng)進(jìn)行了仿真,其結(jié)果表明該控制方法可行
2009-08-31 08:20:2720 倒立擺控制系統(tǒng)是一個(gè)典型的高階次、不穩(wěn)定、多變量、非線性和強(qiáng)藕合控制系統(tǒng)。本文研究分析了單節(jié)倒立擺控制系統(tǒng)的數(shù)學(xué)模型,介紹了線性二次型最優(yōu)調(diào)節(jié)器(LQR)的基本原
2009-09-02 16:38:2724 倒立擺系統(tǒng)是多變量、非線性、強(qiáng)耦合的控制系統(tǒng)。采用模糊控制理論研究二級(jí)倒立擺控制問(wèn)題。運(yùn)用最優(yōu)控制方法設(shè)計(jì)融合函數(shù)以降低模糊控制器的維數(shù),減少模糊控制規(guī)則數(shù),
2010-12-29 17:29:0846 引言
倒立擺系統(tǒng)在控制理論研究中是一種較為理想的實(shí)驗(yàn)裝置。倒立擺系統(tǒng)可以用多種理論和方法來(lái)實(shí)現(xiàn)其穩(wěn)定控制,如PID、自適應(yīng)、狀態(tài)反饋、智
2009-01-01 21:05:33 712
712 
1引言
????? 蹺蹺板系統(tǒng)是一個(gè)比倒立擺系統(tǒng)更為復(fù)雜,更接近于實(shí)際應(yīng)用的典型控制系統(tǒng)。它具有嚴(yán)重的非線性、強(qiáng)耦合、對(duì)干擾敏感、模型過(guò)于復(fù)雜
2010-08-13 11:31:46933 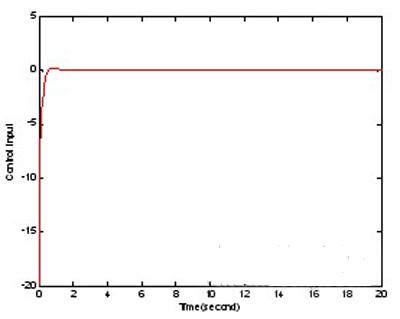
本文利用拉格朗日方程建立了直線一級(jí)倒立擺控制系統(tǒng)的數(shù)學(xué)模型,在此基礎(chǔ)上分析了該系統(tǒng)的性能,并利用LQR控制器進(jìn)行控制。結(jié)果表明,LQR控制器對(duì)該系統(tǒng)具有良好的控制作用
2011-03-31 10:38:327162 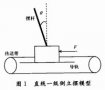
闡述了 倒立擺 實(shí)驗(yàn)系統(tǒng)及其在自動(dòng)控制領(lǐng)域中的應(yīng)用
2011-07-06 18:02:0353 針對(duì) 倒立擺 的起擺控制建立了環(huán)形單級(jí)倒立擺基于拉格朗日方程的運(yùn)動(dòng)方程,在此基礎(chǔ)上提出了能量控制的概念,并將能量補(bǔ)償控制應(yīng)用在環(huán)形單級(jí)倒立擺系統(tǒng)上,仿真和實(shí)際控制結(jié)果表
2011-07-06 18:03:4967 在對(duì) 二級(jí)倒立擺 系統(tǒng)的動(dòng)力學(xué)方程進(jìn)行建模的基礎(chǔ)上將其轉(zhuǎn)化為線性定常系統(tǒng)的狀態(tài)控制問(wèn)題,提出了基于matlab的二級(jí)倒立擺控制系統(tǒng)
2011-07-06 18:05:25111 倒立擺 系統(tǒng)是一個(gè)復(fù)雜的!非線性的!不穩(wěn)定的高階系統(tǒng) 倒立擺的控制一直是控制理論及應(yīng)用的典型課題分析了如何利用拉格朗日方程對(duì)直線柔性連接兩級(jí)倒立擺系統(tǒng)建模采用法設(shè)計(jì)最優(yōu)
2011-07-06 18:17:2242 倒立擺 系統(tǒng)是一個(gè)復(fù)雜的非線性系統(tǒng)本文建立了倒立擺的一種非線性數(shù)學(xué)模型在分析的基礎(chǔ)上為倒立擺系統(tǒng)設(shè)計(jì)了一種模糊控制方案我們對(duì)一級(jí)倒立擺系統(tǒng)進(jìn)行了控制取得了較好的效果
2011-07-06 18:19:4856 倒立擺系統(tǒng)是一種典型的控制系統(tǒng)模型,能夠?qū)?shí)際與理論相結(jié)合,可以開(kāi)發(fā)出新的控制算法來(lái)應(yīng)用在系統(tǒng)模型之上。采用模糊控制算法研究二級(jí)倒立擺系統(tǒng)的控制問(wèn)題,設(shè)計(jì)模糊控制
2012-08-29 15:04:08111 基于MATLAB的模糊控制倒立擺系統(tǒng)研究,感興趣的可以下載看看。
2015-11-03 13:49:5836 倒立擺控制系統(tǒng)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是進(jìn)行控制理論教學(xué)及開(kāi)展各種控制實(shí)驗(yàn)的理想實(shí)驗(yàn)平臺(tái)。對(duì)倒立擺系統(tǒng)的研究能有效的反映控制中的許多典型問(wèn)題:如非線性問(wèn)題、魯棒性問(wèn)題、鎮(zhèn)定問(wèn)題、隨動(dòng)問(wèn)
2015-12-11 11:06:5214 為進(jìn)行性線控制器的設(shè)計(jì)首先需要對(duì)被控制系統(tǒng)進(jìn)行建模.二級(jí)倒立擺系統(tǒng)數(shù)學(xué)模型的建立
2016-06-14 15:29:5616 本文介紹了一種簡(jiǎn)易環(huán)形倒立擺控制系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn)
2016-08-23 16:27:2420 一級(jí)倒立擺的PID控制設(shè)計(jì)
2016-11-08 18:51:1664 基于變量分組模糊控制算法的倒立擺系統(tǒng)_魏勝男
2017-03-16 08:00:000 通過(guò)對(duì)一階旋轉(zhuǎn)倒立擺系統(tǒng)原理的分析,選用單片機(jī)作為控制器,直流電機(jī)作為執(zhí)行器,電位器式角度傳感器作為反饋環(huán)節(jié),采用PID控制算法設(shè)計(jì)實(shí)現(xiàn)了一階旋轉(zhuǎn)倒立擺控制系統(tǒng)。實(shí)驗(yàn)結(jié)果表明該系統(tǒng)在穩(wěn)定的基礎(chǔ)上具有
2017-10-19 15:21:0957 倒立擺是典型的重上支下的系統(tǒng),具有多個(gè)特點(diǎn),包括不穩(wěn)定性、快速多變性、耦合性等,其系統(tǒng)成本低廉、結(jié)構(gòu)簡(jiǎn)單、便于進(jìn)行實(shí)驗(yàn)室操作。而且倒立擺具有多種功能,能對(duì)控制系統(tǒng)進(jìn)行檢驗(yàn)、對(duì)機(jī)器人的行走和火箭發(fā)射
2017-11-09 14:50:5624 倒立擺控制系統(tǒng)(InvertedPendulumSystem簡(jiǎn)稱IPS)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是進(jìn)行控制理論教學(xué)及開(kāi)展各種控制實(shí)驗(yàn)的理想實(shí)驗(yàn)平臺(tái)。對(duì)倒立擺系統(tǒng)的研究能有效的反映控制
2017-11-27 16:36:0255222 倒立擺控制系統(tǒng)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是控制理論發(fā)展中的一個(gè)典型問(wèn)題。目前,通過(guò)倒立擺系統(tǒng)驗(yàn)證過(guò)的許多控制方法在航天、機(jī)器人以及一般工業(yè)過(guò)程領(lǐng)域均有著廣泛的應(yīng)用。如航天飛機(jī)的姿態(tài)控制
2018-02-04 11:25:280 針對(duì)存在模型參數(shù)不確定性和外部擾動(dòng)的直線型二級(jí)倒立擺系統(tǒng)的穩(wěn)擺控制問(wèn)題,對(duì)如何實(shí)現(xiàn)倒立擺系統(tǒng)魯棒穩(wěn)定的同時(shí),還保證其達(dá)到期望的最優(yōu)控制性能和H性能指標(biāo)的穩(wěn)定性控制問(wèn)題進(jìn)行了研究。基于狀態(tài)反饋
2018-03-06 14:11:581 擺系統(tǒng)控制上得到實(shí)現(xiàn),而且當(dāng)一種新的控制理論和方法提出以后,在不能用理論加以嚴(yán)格證明時(shí),可以考慮通過(guò)倒立擺裝置來(lái)驗(yàn)證其正確性和實(shí)用性。本文設(shè)計(jì)了基于單片機(jī)的得倒立擺控制系統(tǒng),成本低廉,調(diào)試方便,能直觀的觀察控制效果,完成系統(tǒng)的調(diào)試任務(wù),快捷的驗(yàn)證控制理論算法的正確與否。
2020-05-03 10:29:001255 
倒立擺作為一種典型的控制系統(tǒng)實(shí)驗(yàn)裝置,具有非線性、自然不穩(wěn)定等特性,常用來(lái)作為檢驗(yàn)?zāi)撤N控制理論或方法是否合理的典型方案。一階倒立擺系統(tǒng)能用多種理論和方法來(lái)實(shí)現(xiàn)其穩(wěn)定控制,如PID、自適應(yīng)、狀態(tài)反饋、模糊控制及人工神經(jīng)元網(wǎng)絡(luò)等多種理論和方法都能在倒立擺系統(tǒng)控制上得到實(shí)現(xiàn)。
2022-02-10 11:46:563
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論