 電子發(fā)燒友App
電子發(fā)燒友App


??????? 電子發(fā)燒友網(wǎng)按:電子工程師在平時的電子設(shè)計中,往往從事的研發(fā)設(shè)計案只涉及到電子知識中的一小部分環(huán)節(jié),要是能從自身職業(yè)中的桎梏脫離出來,在業(yè)余完成一件屬于自己的電子杰作,自然樂在其中。在動手制作的過程中更是極大的考驗著種種知識的扎實程度和實際動手能力,對各種知識死角進行梳理,從而將各種知識有條理地串起來為以后工作所用。無疑,這次的主題《十大最受歡迎機器人DIY設(shè)計精華集錦》——機器人的DIY設(shè)計將會是一個起點,請記住,這里只有動手創(chuàng)新,這里沒有模仿山寨!
一、外國牛人教你一步步快速打造首臺機器人(超詳細)
電子發(fā)燒友網(wǎng)訊:這是一個方法最簡單,入門最快速的機器人制造教程。
這里面說到的東西都非常簡單,看過這些教程以后,你可以在幾個小時內(nèi)制造出一個機器人。何樂而不為呢?
由于有很多細小的東西需要你們?nèi)チ私猓韵戮徒o你介紹這些東西,而沒有其他。如果你對所要求的掌握的東西有兩年的應(yīng)用經(jīng)驗的話,你可以快速跳過這些介紹,然后個小時完成一個機器人的制作。盡管都很容易,但學(xué)習(xí)還是要花費時間的,為了有一個美好的周末,讓我們花一些時間,去了解這全部的資料。
此處還有一起關(guān)于怎樣建造機器人的另外一些資料。這主要是集中在如何使你更快速的建造機器人。你不需要了解任何的知識?你將會將所有基礎(chǔ)性的東西做的很好。
材料需求
以前購買這些材料是非常困難的,因為沒有一個專門的網(wǎng)店能提供所有的東西,你需要從不同的店里購買。
但幸運的是有一些網(wǎng)店已經(jīng)根據(jù)說明提供了他們的整套裝備,如:
Jaxx’s shop(美國網(wǎng)店)
Solarbotics shop(加拿大網(wǎng)店)
Hobby2go (印度網(wǎng)店)
如果你從哪些網(wǎng)店購買東西,你還可以成為letsmakerobots.com的會員,因為要成為上面名單的一員,他們要和我們聯(lián)系,我們之間就會達成了一種交易。
如果你不想買LMR套裝,你可以通過google從網(wǎng)店購到你所需要的任何配件。只要在網(wǎng)店上有得賣,無論你在任何國家,你都想得到你想要的產(chǎn)品。
無論你通過什么途徑得到配件,以下這些是必須的:
一個PICAXE-28開發(fā)板

這個28針的開發(fā)板就像馬里奧兄弟一樣有趣,充滿著各種附帶的和隱蔽的功能,這會使你有興趣在上面多次玩弄。這是一個非常好的板子,會令你迫不及待的去做機器人,

很多時候你買的板子上面會有很多洞,這使你很能將那些東西插到上面。你可以通過把錫絲焊到這些洞上去克服它,另一種方法是加上這些針腳,借此你可以插入那些線。就好像下面展示的那些伺服電機和插槽一樣。或許有人會問為什么在出廠前把插針插在洞里。其實我也不知道,可能是為了給我們一個建議。它可以安裝插槽到這個板上面,或者這就是原因。
你可以得到一長條,可以用手指輕易把它們掰成幾段。
3個跳線帽

將這些插在相連的兩個陣腳間,可以連接這兩根針。
五個以上杜邦線

沒錯,這些東西非常棒,我?guī)啄昵伴_始這項業(yè)務(wù)愛好的時候,這些配件是很難得到的。現(xiàn)在這些東西遍地都是,而且質(zhì)量都非常好。在這些新機器人業(yè)余配件上都有針腳,你可以利用這些跳線輕易的連接所有東西,而不需要焊接,這一切都非常棒。
一個USB PICAXE可編程下載線

你在電腦上編寫程序,把這個插進你的機器人里面,轉(zhuǎn)移程序,拔下,機器人就會自動運行程序。
一個PICAXE-28X1 芯片

這個芯片是一個微控制器,通常會被解析為“在芯片上的計算機”。這可以被放置在上面介紹的開發(fā)板上面,之后它可以透過可編程線從你的電腦燒錄程序。
程序會提醒操作者“聆聽輸入”、“考慮”,有時還會做一些計算或者查詢數(shù)據(jù),之后就做出如下面所說的的馬達驅(qū)動等輸出。
我們選擇它,因為它很結(jié)實,同時易編程,從下面的圖片你可以看出來
一個L293D 馬達驅(qū)動芯片

我會在下面安裝的時候介紹它
一個330×8雙列直插式排阻
這個黃色的芯片,不怎么好看,只是一個排阻,你將會用它來配置你的板以適合你的伺服。
一個標準的伺服電機

伺服電機是大部分自動應(yīng)用的基礎(chǔ),為了使它更節(jié)省空間,其被封裝在一個小箱子里面,然后用一根線去連接,同時有一個可以左右搖擺兩百度的傳動軸。【詳情請參閱:外國牛人教你一步步快速打造首臺機器人 】
?
二、工程師電子制作故事:無線網(wǎng)絡(luò)控制激光坦克機器人
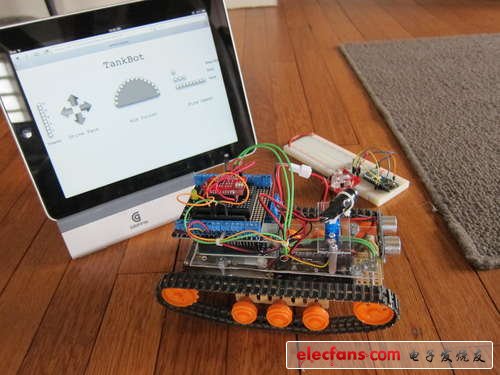
電子發(fā)燒友網(wǎng)訊:你還記得一個叫“坦克大戰(zhàn)的”的游戲么?本文的內(nèi)容就是嘗試將這個經(jīng)典游戲做成真人版本。作為游戲玩家的你,駕著Arduino 動力坦克用激光射中你的目標。
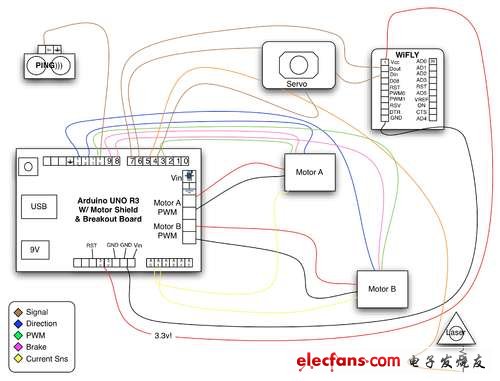
這個項目是透過網(wǎng)頁利用Arduino 去控制坦克,這借助Wifly來通信的,具體是通過網(wǎng)頁上的控制面板去操縱實現(xiàn)。坦克運用Parallax Ping去躲避障礙物,這是一種瞄準炮臺和坦克模型平臺定位的伺服系統(tǒng)。
你問我為什么干這個?因為我和大家一樣都想去做一個能發(fā)射激光的坦克。
?
Step1:制造這個坦克你需要準備以下東西:
-雙轉(zhuǎn)子變速電動機
-坦克履帶板
-坦克底板(在此放雙轉(zhuǎn)子電動機)
-電動機保護罩
-工具集合板(包括PCB,LED,排插,電阻,螺絲釘?shù)龋?/p>
-激光筆
-超聲波距離探測傳感攝像頭模塊
-迷你伺服器
-螺母,螺釘,樹脂玻璃等
-直流充電器
-7.2v電池
-無線天線模塊
-過孔PCB印制電路板
做那個被攻擊的目標,你要一下配件:
-可編程光頻率IC
-三色LED燈
Step2:組裝坦克
你需要裝配以下產(chǎn)品:
-齒輪箱
-坦克履帶板
-工具集合板
我用螺母和螺栓去為ARDUINO、伺服和PING造了一個平臺
我照著一般金屬板的裝置尺寸弄了另一個有機玻璃的平臺。
這激光筆可以裝在伺服器的角上
我最得意之處就是弄Arduino Motor Shield時雖然用了很多的插針,但你不能看到它,驟眼望過去就像是在內(nèi)部用鐵線連接的。我覺得這非常有用,因此我趕快把它記錄了下來。


Step3:電源
這坦克馬達需要很耗電,我不想AA電池或9V電池損耗得那么快,RC汽車團體已經(jīng)花時間搞出了一個功耗稍微小點的產(chǎn)品,因此我選用了非常好的7.2V 1750ma電池和一個相當不錯的Sport II充電器。
然后用一個接插頭把電池接到馬達外殼的接線柱上面。【詳情請參閱:工程師電子制作故事:無線網(wǎng)絡(luò)控制激光坦克機器人 】
三、工程師電子制作故事:WIFI機器人DIY設(shè)計
在經(jīng)歷了十多天的瘋狂淘寶、組裝、調(diào)試、拆卸、再組裝、再調(diào)試的過程后,我的Wifi Robot終于面世!!淚流滿面!下面簡單寫寫制作過程,也好給自己留個存檔。
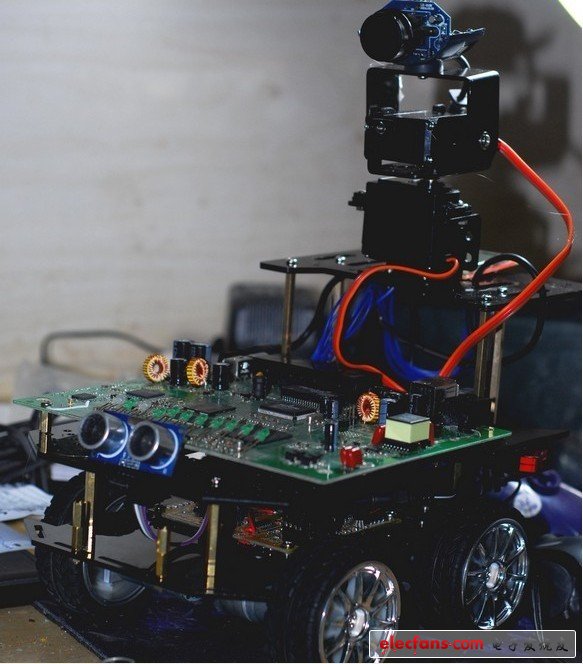
俺用的方案是igee論壇的wifi小車方案,驅(qū)動板與控制程序都是現(xiàn)成滴……不過現(xiàn)在發(fā)現(xiàn)吃現(xiàn)成的雖然方便,但是擴展功能卻少得可憐。下一步打算買塊arduino板自己研究一下重新組裝小車,自己寫寫程序什么的。
Wifi Robot,顧名思義就是通過wifi無線網(wǎng)控制的機器人,比起普通的遙控車遙控機器人來,它的好處就是遙控信號覆蓋范圍可以做到很廣,也可以通過互聯(lián)網(wǎng)遠程遙控,這樣的話就可以派生出很多新的應(yīng)用,比如視頻監(jiān)控等等。因為是新手初學(xué),機器人的外形和功能上還比較粗糙,高手看到了不要笑話~
1.準備工作
羅列一下零件清單:
亞克力車架×1:65元
igee小車驅(qū)動板帶5110屏×1:150元
超聲波傳感器×1:40元
大亞DB120-B1無線路由×1:45元
301芯片攝像頭×5:第一次買的一個10塊,讓我把線扯斷了焊不上了,廢棄。第二次買的一個10塊,又壞了……第三次買了仨,每個5塊。至今正常。合計35。
廣角鏡頭×1:5.3元
輝盛M995舵機×2:70元
舵機云臺支架×1:32元
步進馬達套件×4:144元
12V4800mAh鋰電池:87元
杜邦線螺絲螺帽等等配件若干……
合計:673.3元
由于是第一次進行機器人制作,工具基本沒有,光買電烙鐵熱熔膠槍電鉆萬用表就花了不少錢。加上亂七八糟的花銷,總共1200+。一個多月的生活費沒了……
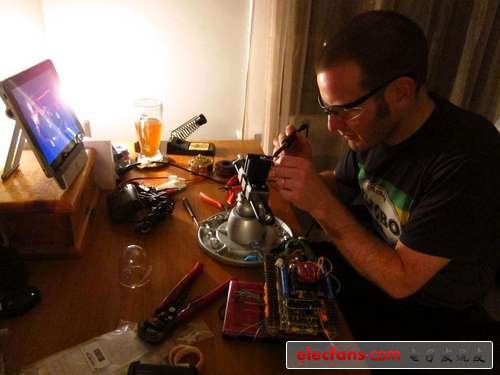
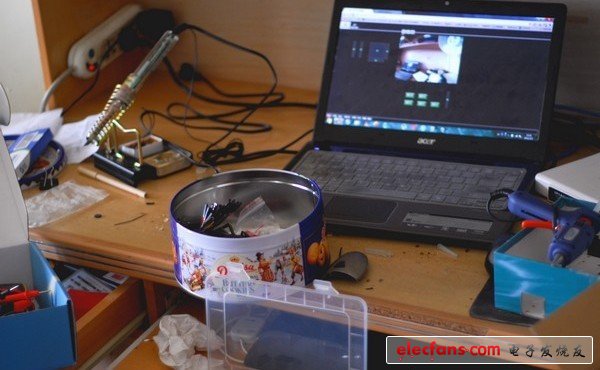
大家欣賞一下我的工作環(huán)境
寢室條件比較簡陋……電腦畫面為機器人控制界面
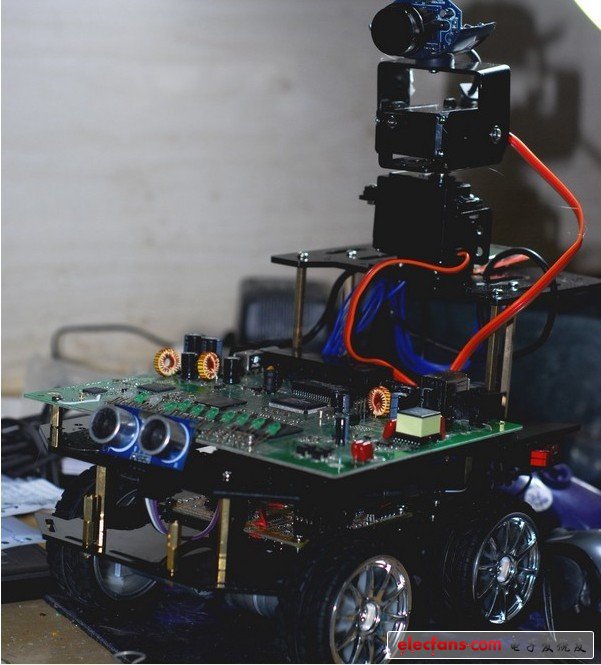
在買到亞克力車架和電鉆之前我的小車一直使用個紙盒做車架的。紙盒雖然加工方便,但是太軟,小車經(jīng)常跑偏。而且由于輪距不合適,加裝舵機云臺之后由于載重增加導(dǎo)致轉(zhuǎn)彎阻力太大,小車基本轉(zhuǎn)不動了。
拆之前忘了照相,只好拆完拼湊一下。依稀還可以看出原來小車的影子。
亞克力板很便宜,易于加工,完全可以不買成品板自己加工出來。但是缺點是不如鋁板結(jié)實和拉風(fēng),上螺絲時容易出現(xiàn)裂紋。如果選用鋁做車架的話,可以考慮用鋁盒或角鋁,經(jīng)過簡單加工也是非常好的車架。
3.正式開工!
首先在底盤上安裝馬達支架。在合適的地方打孔并安裝馬達支架。注意孔徑不要太小,不然強行上螺絲會導(dǎo)致亞克力開裂。另外打孔時先用錐子之類的定位就不會打偏了。
如果是自制車架的話,要考慮好輪距。我做的是四驅(qū)小車,左右轉(zhuǎn)彎要靠兩側(cè)的車輪反轉(zhuǎn)實現(xiàn),輪距太寬容易造成轉(zhuǎn)彎阻力太大。
正面固定好驅(qū)動板。可以考慮用銅柱把板子架高,方便線通過。

安裝步進馬達并焊好控制線。焊之前先給線頭沾點松香上錫,焊起來會比較方便。另外這片驅(qū)動板的舵機供電部分采用的是一片L7805,工作時發(fā)熱較大,我用螺絲固定在了鋁制馬達支架上幫助散熱,用金屬車身的話效果當然更好了。【詳情請參閱:工程師電子制作故事:WIFI機器人DIY設(shè)計 】
?
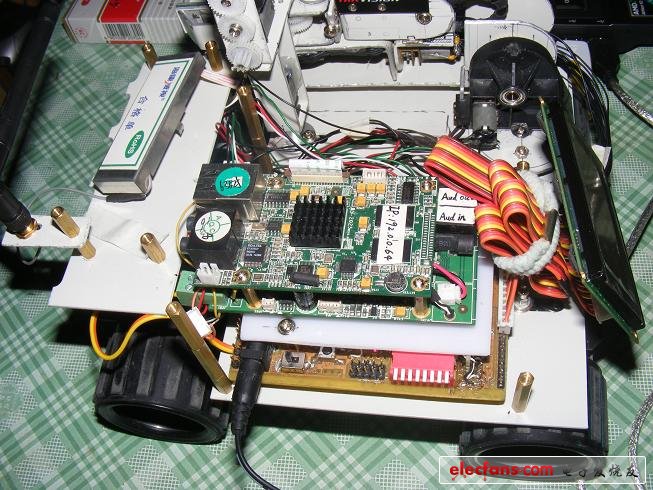
四、工程師電子制作故事:WIFI/3G太陽能機器人DIY設(shè)計
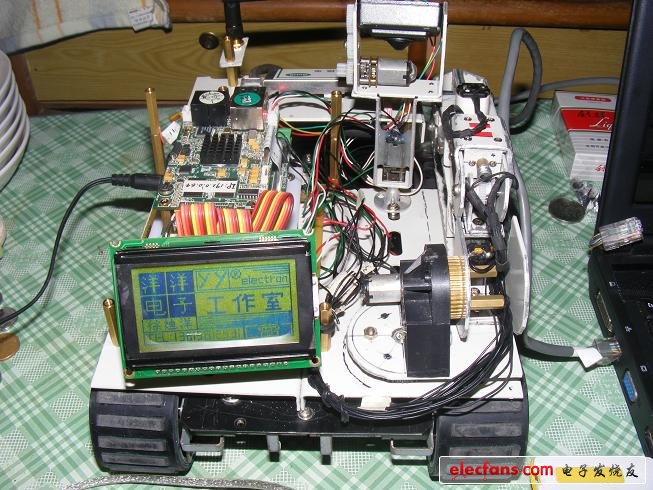
這個四輪驅(qū)動機器人的底盤完全由手工打造,無論是輪子還是底盤,大家可以看看圖哦
將最近做的一個基于WIFI,3G控制的四輪驅(qū)動機器人拿出來與大家分享一下!
輪子是由一個鋁合金外罩,內(nèi)部嵌入鋼輪,再連接減速電機,輪子的外面很清晰的可以看是有橡膠用502粘起來,效果不錯哦。

下面介紹一下機器人的功能:
這是一個無線遠程端控制型四輪驅(qū)動機器人,帶有水平垂直控制云臺,云臺上搭載一個豆干攝像頭,3.6MM鏡頭,可以看到較廣的視野。3度機械手,可以實現(xiàn)較難度的控制,
搭載一個12864控制顯示液晶模塊。

外加一個無線網(wǎng)卡實現(xiàn)無線控制。實現(xiàn)尋跡、前后四方向自動壁障,太陽能充電,16.5V電池管理和編程自動化等功能。

雖然自動尋跡,自動壁障,太陽能充電,還沒做,不過都是簡單的幾個功能。
下面詳細介紹各部分
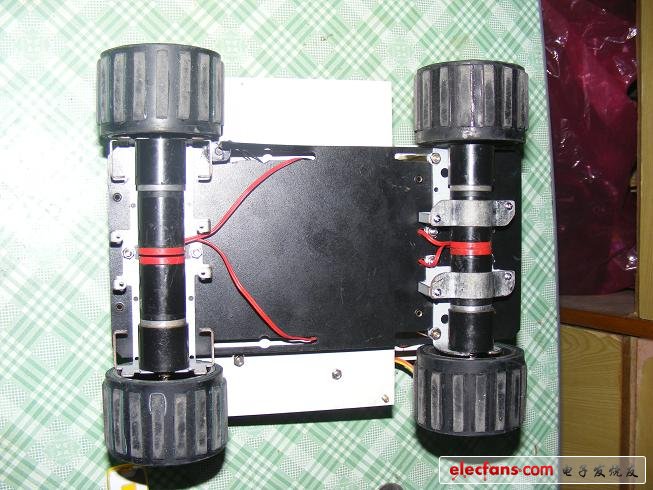
我喜歡而且最費時間的是底盤部分,畢竟基礎(chǔ)一定要打好,不然會翻車哦,底盤很重,完全有金屬打造,輪子外圈采用中空鋁合金,由于里面是中空的,所以得裝中心軸,而中心軸采用經(jīng)過打磨的純鋼圈,再里面是銅軸與減速電機連接,所以較復(fù)雜也費時間。底盤面也采用鋼板構(gòu)架。與電機固定的是鐵支架,所以整套底盤完完全全由鋼鐵制作。減速電機的速度為30圈每分鐘。速度不是很快,但很精確。【詳情請參閱:工程師電子制作故事:WIFI/3G太陽能機器人DIY設(shè)計 】
五、工程師電子制作故事:太陽能衛(wèi)星陀螺機器人DIY設(shè)計

本項目介紹的是太陽能衛(wèi)星機器人,同樣是采用太陽能脈動充放電控制電路,但是卻是另外一種全新的運動方式——以陀螺旋轉(zhuǎn)的方式移動,所以又稱為太陽能陀螺機器人。
如果了解BEAM機器人的朋友,可能對這樣造型的機器人已經(jīng)很熟悉了——三腳支架中的兩腳,加上連接電機的底部轉(zhuǎn)盤,總共三點支撐地面,曬會太陽充會電,電機驅(qū)動轉(zhuǎn)盤轉(zhuǎn)動再帶動機器人移動。
一、基本原理
1.1、驅(qū)動原理
1.2、機械結(jié)構(gòu)
1.3、電路原理
二、準備工作
三、制作過程
3.1、電路焊接
3.2、三腳支架
3.3、電 路 板
3.4、電機支架
3.5、整機組裝
3.6、整機調(diào)試
四、效果展示
五、擴展完善
5.1、功能擴展
5.2、版本升級
六、常見問題
七、項目總結(jié)
從以上插圖我們可以看到兩種不同的造型,不過原理都是基本一樣的,只不過結(jié)構(gòu)上有一點區(qū)別(有一個帶了碰撞環(huán),這個后面會具體說明)。
一、基本原理
本項目的機器人的外形像一個人造衛(wèi)星,是以太陽能電池作為電源,電機驅(qū)動底部的轉(zhuǎn)盤轉(zhuǎn)動,從而帶動整個機器人移動。由于以自身轉(zhuǎn)動的方式進行移動的,就像一個旋轉(zhuǎn)的陀螺,所以本項目機器人又可稱為“陀螺機器人”。
1、驅(qū)動原理
本項目的驅(qū)動原理也是比較簡單的,主要是電機帶動底部的轉(zhuǎn)盤轉(zhuǎn)動——機器人有一個三腳支架,同時只有相鄰的某兩腳支撐地面,再加上底部連接電機的轉(zhuǎn)盤,“兩腳+轉(zhuǎn)盤”——三點支撐地面。電機帶動轉(zhuǎn)盤轉(zhuǎn)動,則其中一點轉(zhuǎn)動,另外兩點支撐,機器人就可以整體移動。
2、機械結(jié)構(gòu)
本項目機器人有一個三腳支腳,主要有三種情況的結(jié)構(gòu),稍微通過調(diào)整就可以有不同的運行效果。
1、如果是三腳支架離地比較高(相對于轉(zhuǎn)盤),且底部用直徑比較小的轉(zhuǎn)盤,則三點平衡比較穩(wěn)定,每完成一次充電周期后電機轉(zhuǎn)動只能帶動轉(zhuǎn)盤轉(zhuǎn)一點距離,一般只能是由一組相鄰的雙腳交換為下一組相鄰的雙腳支撐地面,每周期移動的距離比較小。【詳情請參閱:工程師電子制作故事:太陽能衛(wèi)星陀螺機器人DIY設(shè)計 】
六、德國首臺月球自動駕駛探測機器人曝光(圖文)
電子發(fā)燒友網(wǎng)訊:為了獲得搜索引擎巨頭Google舉辦的“太空競賽”中價值2000萬美元的頭獎,德國的Google Lunar X-PRIZE團隊Part-Time Scientists(PTS)計劃在2014年將其Asimov月球車發(fā)射到月球表面。
如果這個計劃成功,那么Asimov將會成為月球上第一部自動駕駛的探測車。Asimov獲得了其應(yīng)用到的GPU的制造商英偉達(Nvidia)的全程贊助。
PTS制造的月球探測器Asimov
這個探測車就其本身來說是德國航空中心的機械人學(xué)與機械電子學(xué)研究所和PTS合作的產(chǎn)物。
來自16個國家的26支隊伍參加了以上這個挑戰(zhàn),這個競賽另外還提供1000萬給其他競爭者去分配。為了獲得這2000萬獎金,這些隊伍的探測器必須在地球上軟著陸,同時能在月球上面漫游至少五百米,也需要把高分辨率的視頻和圖像傳回地球。除此之外,Google Lunar X PRIZE還提供一個“Apollo Heritage Bonus ”獎捕獲到“阿波羅”計劃中遺留的物品畫面的隊伍。【詳情請參閱:德國首臺月球自動駕駛探測機器人曝光 】
七、一種智能小車機器人設(shè)計方案
實現(xiàn)汽車智能化的技術(shù)非常多, 本文利用目前比較熱門的技術(shù)語音控制技術(shù), 實現(xiàn)小車自動前進、后退、左拐、右拐等, 當然所設(shè)計的小車只是智能汽車的微模型, 還處于模擬演示階段, 要真正實現(xiàn)智能汽車為人服務(wù)還有很長一段距離。
1 智能車的核心控制器
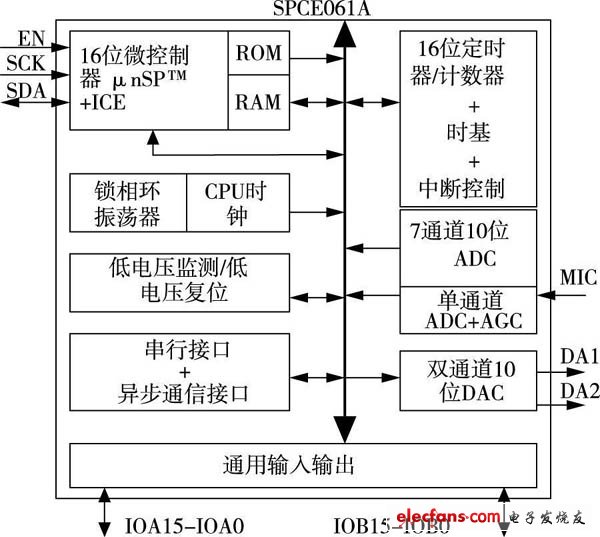
SPCE061A 是一款16位獨具語音特色的控制器, 片內(nèi)采用的nSPTM ( microcontro ller and signal processor) 核心處理器, 具有較高的處理速度, 能夠完成16位算術(shù)邏輯運算、16 × 16位硬件乘法運算和DSP內(nèi)積濾波運算, 能夠快速處理復(fù)雜的數(shù)字信號, 不需要額外的專用語音控制芯片, 就能實現(xiàn)語音的編解碼等, 既節(jié)省了設(shè)計成本, 又能滿足一定的控制要求。控制器采用模塊化架構(gòu), 集成了ICE(在線仿真)、鎖相環(huán)振蕩器、時基控制器、7通道10位AD轉(zhuǎn)換器、單通道AD+ AGC(自動增益)轉(zhuǎn)換器、雙通道10位DA轉(zhuǎn)換器、通用異步通信接口、串行輸入輸出接口、電壓監(jiān)控等模塊, 其結(jié)構(gòu)如圖1所示。
?
圖1 SPCE061A 控制器的結(jié)構(gòu)圖
2 智能小車的總體設(shè)計
智能小車整體主要由語音輸入電路、語音輸出電路、SPCE061A 控制器、驅(qū)動電路等組成。小車的SPCE061控制器通過內(nèi)置麥克放大器和自動增益功能的A /D 通道、D /A通道實現(xiàn)語音控制, 語音觸發(fā)小車動作, 小車動作后, 隨時可以通過語音指令改變小車的運動狀態(tài), 如果行進過程中遇到前方有障礙, 小車會自動停車。
3 智能小車的硬件設(shè)計
1) 語音輸入電路。
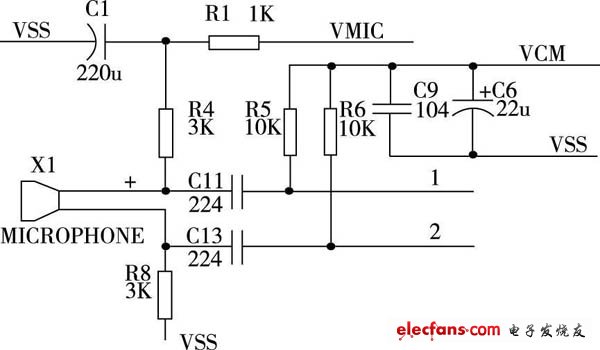
小車的語音輸入電路如圖2所示。其中, VM IC 提供傳聲器的電源, VSS是系統(tǒng)的模擬地, VCM 為參考電壓, 1腳和2腳分別是傳聲器X1 的正極、負極的輸入引腳。當對著傳聲器講話時, 1腳和2 腳將隨著傳聲器輸入的聲音產(chǎn)生變化的波形, 并在SPCE061A 的兩個端口處形成兩路反相的波形, 送到SPCE061A 控制器內(nèi)部的運算放大器進行音頻放大, 經(jīng)過放大的音頻信號, 通過ADC轉(zhuǎn)化器轉(zhuǎn)化為數(shù)字量, 保存到相應(yīng)的寄存器中, 然后對這些數(shù)字音頻信號進行壓縮、辨識、播放等處理。
?
圖2 語音輸入電路
2) 語音輸出電路。
小車的語音輸入電路如圖3所示。其中, VDDH 為參考電壓, VSS是系統(tǒng)的模擬地。音頻信號由SPCE061A 的DAC引腳輸出送到電路的9端, 通過音量電位器R9的調(diào)節(jié)端送到集成音頻功率放大器SPY0030, 經(jīng)音頻放大后, 音頻信號從SPY0030輸出經(jīng)J2端口外接揚聲器播放聲音。【詳情請參閱:智能小車機器人設(shè)計方案 】
八、74HC240制作尋光機器人
本文將給讀者介紹我制作的另一部由74HC240作為主控核心的尋光機器人,依然貫徹低技術(shù)、低成本的制作理念,與大家共賞。
控制核心的深入分析
施密特觸發(fā)器
施密特觸發(fā)器的閥值電壓決定了系統(tǒng)的給定值,施密特觸發(fā)器的特性也就決定了這個系統(tǒng)的特性。因此有必要深入了解一下這個器件的特點。
施密特觸發(fā)器是由美國科學(xué)家Otto Herbert Schmitt于1934年發(fā)明的,當時他只是一個研究生。事后三年,他在其博士論文中將這一發(fā)明描述為“Thermionic Trigger”。這一發(fā)明是他對魷魚神經(jīng)中的神經(jīng)脈沖傳播進行研究的直接成果。在電子學(xué)中,施密特觸發(fā)器是包含了正反饋的比較器電路。施密特觸發(fā)器也有兩個穩(wěn)定狀態(tài),但與一般觸發(fā)器不同的是,施密特觸發(fā)器采用電位觸發(fā)方式,其狀態(tài)由輸入信號電位維持;對于負向遞減和正向遞增兩種不同變化方向的輸入信號,施密特觸發(fā)器有不同的閥值電壓。施密特觸發(fā)器是一種特殊的門電路,與普通的門電路不同,施密特觸發(fā)器有兩個閾值電壓,分別稱為正向閥值電壓和負向閥值電壓。在輸入信號從低電平上升到高電平的過程中使電路狀態(tài)發(fā)生變化的輸入電壓稱為正向閥值電壓,在輸入信號從高電平下降到低電平的過程中使電路狀態(tài)發(fā)生變化的輸入電壓稱為負向閥值電壓。正向閥值電壓與負向閥值電壓之差稱為回差電壓。對于標準施密特觸發(fā)器,當輸入電壓高于正向閥值電壓,輸出為高;當輸入電壓低于負向閥值電壓,輸出為低;當輸入在正負向閥值電壓之間,輸出不改變,也就是說輸出由高電平翻轉(zhuǎn)為低電平,或是由低電平翻轉(zhuǎn)為高電平對應(yīng)的閥值電壓是不同的。只有當輸入電壓發(fā)生足夠的變化時,輸出才會變化。這種雙閥值動作被稱為遲滯現(xiàn)象,表明施密特觸發(fā)器有記憶性,可用于在開環(huán)配置中的抗干擾。
改進版的控制核心
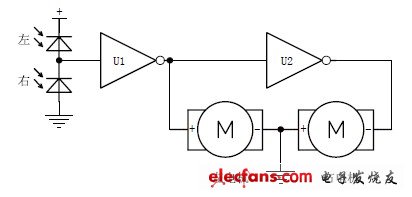
圖2為改進版的尋光機器人,核心部分由一對光敏二極管和74HC240集成電路構(gòu)成。74HC240是一片功能強大的三態(tài)緩沖器,芯片內(nèi)部集成了8路帶有施密特觸發(fā)器輸入特性的反向緩沖器。在數(shù)字計算機中,這類緩沖器的作用是用來暫時存放處理器送往外設(shè)的數(shù)據(jù),有了數(shù)控緩沖器,就可以使高速工作的CPU部分與慢速工作的外設(shè)起協(xié)調(diào)和緩沖作用,實現(xiàn)數(shù)據(jù)傳送的同步。這個改進版的尋光機器人,因為有了74HC240的加盟,使得機器人的控制系統(tǒng)即可以繼承到上文所介紹的施密特觸發(fā)器的全部好處,又可以借助緩沖器的作用,來協(xié)調(diào)機器人電子部分與機械結(jié)構(gòu)之間的配合。實際制作完成以后的機器人運行方式,介于模擬控制與數(shù)字控制之間,因此它的設(shè)計者也給它起了一個形象的名字“Bare Bones Photovore”,我把它翻譯為“準系統(tǒng)尋光機器人”。線路圖中的U1和U2分別各代表了74HC240芯片內(nèi)一組并聯(lián)工作的驅(qū)動器。
?
圖2 74HC240尋光機器人線路圖
圖3是74HC240的框圖,可以看到芯片內(nèi)部由兩組帶有使能輸入端的反向緩沖器組成,輸入端和輸出端分別為A1, A2, A3,A4, B1, B2, B3, B4(對應(yīng)管腳2, 4, 6, 8, 11, 13, 15, 17);YA1,YA2, YA3, YA4, YB1, YB2, YB3, YB4(對應(yīng)管腳 18, 16, 14, 12, 9, 7,5, 3)。使能輸入端為Enable A, Enable B (對應(yīng)管腳1, 19),電源正(對應(yīng)管腳20),電源地(對應(yīng)管腳10)。

?
圖3 74HC240內(nèi)部圖
緩沖器分為兩種,常規(guī)緩沖器和三態(tài)緩沖器。常規(guī)緩沖器總是將值直接輸出,用在推進電流到高一級的電路系統(tǒng)。三態(tài)緩沖器除了常規(guī)緩沖器的功能外,還設(shè)置有使能輸入端,這里對應(yīng)的是74HC240的第1腳和第19腳。從圖4的真值表中可以看出當使能端電平不同時緩沖器有不同的輸出值。當Enable A,Enable B=0時,芯片選通,緩沖器工作;當Enable A, EnableB=1,緩沖器被阻止,無論輸入什么值,輸出的總是高阻抗狀態(tài),用Z表示。高阻抗狀態(tài)能使電流降到足夠低,以致于類似緩沖器的輸出沒有與任何電路相連。【詳情請參閱:74HC240制作尋光機器人 】
九、單片機實現(xiàn)的簡易智能機器人
引言
隨著微電子技術(shù)的不斷發(fā)展,很容易將計算機技術(shù)與測量控制技術(shù)結(jié)合,組成智能化測量控制系統(tǒng)。目前人們已經(jīng)完全可以設(shè)計并制造出具有某些特殊功能的簡易智能機器人。
1 設(shè)計思想與總體方案
1.1 簡易智能機器人的設(shè)計思想
本機器人能在任意區(qū)域內(nèi)沿引導(dǎo)線行走,自動繞障,在有光源引導(dǎo)的條件下能沿光源行走。同時,能檢測埋在地下的金屬片,發(fā)出聲光指示信息,并能實時存儲、顯示檢測到的斷點數(shù)目以及各斷點至起跑線間的距離,最后能停在指定地點,顯示出整個運行過程的時間。
1.2 總體設(shè)計方案和框圖
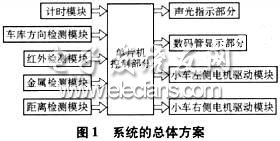
本設(shè)計以AT89C5l單片機作為檢測和控制核心。采用紅外光電傳感器檢測路面黑線及障礙物,使用金屬傳感器檢測路面下金屬鐵片,應(yīng)用光電碼盤測距,用光敏電阻檢測、判斷車庫位置,利用PWM(脈寬調(diào)制)技術(shù)動態(tài)控制電動機的轉(zhuǎn)動方向和轉(zhuǎn)速。通過軟件編程實現(xiàn)機器人行進、繞障、停止的精確控制以及檢測數(shù)據(jù)的存儲、顯示。通過對電路的優(yōu)化組合,可以最大限度地利用51單片機的全部資源。
P0口用于數(shù)碼管顯示,P1口用于電動機的PWM驅(qū)動控制,P2,P3口用于傳感器的數(shù)據(jù)采集與中斷控制。這樣做的優(yōu)點是:充分利用了單片機的內(nèi)部資源,降低了總體設(shè)計的成本。該方案總體方案見圖1。
?
2 系統(tǒng)的硬件組成及設(shè)計原理
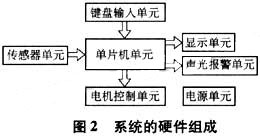
此系統(tǒng)的硬件部分由單片機單元、傳感器單元、電源單元、聲光報警單元、鍵盤輸入單元、電機控制單元和顯示單元組成,如圖2所示。
?
2.1 單片機單元
本系統(tǒng)采用AT89C51單片機作為中央處理器。其主要任務(wù)是掃描鍵盤輸入的信號啟動機器人,在機器人行走過程中不斷讀取傳感器采集到的數(shù)據(jù),將得到的數(shù)據(jù)進行處理后,根據(jù)不同的情況產(chǎn)生占空比不同的PWM脈沖來控制電機,同時將相關(guān)數(shù)據(jù)送顯示單元動態(tài)顯示,產(chǎn)生聲光報警信號。其中,P0用于數(shù)碼管動態(tài)顯示,P1.0一P1.5控制2個電機,P1.6、P1.7為獨立式鍵盤接口,P2接傳感器,P3.2接計里程的光電碼盤,P3.7接聲光報警單元,P3.4、P3.5、P3.6接用于顯示斷點數(shù)目的發(fā)光二極管。【詳情請參閱:單片機實現(xiàn)的簡易智能機器人 】
?
十、基于DSP和FPGA的機器人聲控系統(tǒng)設(shè)計
1 引言
機器人聽覺系統(tǒng)主要是對人的聲音進行語音識別并做出判斷,然后輸出相應(yīng)的動作指令控制頭部和手臂的動作,傳統(tǒng)的機器人聽覺系統(tǒng)一般是以PC機為平臺對機器人進行控制,其特點是用一臺計算機作為機器人的信息處理核心通過接口電路對機器人進行控制,雖然處理能力比較強大,語音庫比較完備,系統(tǒng)更新以及功能拓展比較容易,但是比較笨重,不利于機器人的小型化和復(fù)雜條件下進行工作,此外功耗大、成本高。本次設(shè)計采用了性價比較高的數(shù)字信號處理芯片TMS320VC5509作為語音識別處理器,具有較快的處理速度,使機器人在脫機狀態(tài)下,獨立完成復(fù)雜的語音信號處理和動作指令控制,F(xiàn)PGA系統(tǒng)的開發(fā)降低了時序控制電路和邏輯電路在pcb板所占的面積,使機器人的“大腦”的語音處理部分微型化、低功耗。一個體積小、低功耗、高速度能完成特定范圍語音識別和動作指令的機器人系統(tǒng)的研制具有很大的實際意義。
2 系統(tǒng)硬件總體設(shè)計
系統(tǒng)的硬件功能是實現(xiàn)語音指令的采集和步進電機的驅(qū)動控制,為系統(tǒng)軟件提供開發(fā)和調(diào)試平臺。如圖1所示。
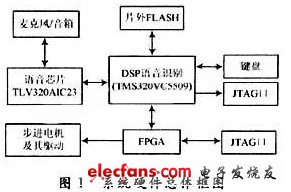
系統(tǒng)硬件分為語音信號的采集和播放,基于DSP的語音識別,F(xiàn)PGA動作指令控制、步進電機及其驅(qū)動、DSP外接閃存芯片,JTAG口仿真調(diào)試和鍵盤控制幾個部分。工作流程是麥克風(fēng)將人的語音信號轉(zhuǎn)化為模擬信號,在經(jīng)過音頻芯片TLV320AIC23量化轉(zhuǎn)化成數(shù)字信號輸入DSP.DSP完成識別后,輸出動作指令。
FPGA根據(jù)DSP輸入的動作指令產(chǎn)生正確的正反轉(zhuǎn)信號和準確的脈沖給步進電機驅(qū)動芯片,驅(qū)動芯片提供步進電機的驅(qū)動信號,控制步進電機的轉(zhuǎn)動。片外FLASH用于存儲系統(tǒng)程序和語音庫并完成系統(tǒng)的上電加載。JTAG口用于與PC機進行聯(lián)機在線仿真,鍵盤則用于參數(shù)調(diào)整和功能的切換。
3 語音識別系統(tǒng)設(shè)計
3.1 語音信號的特點
語音信號的頻率成分主要分布在300~3400Hz之間,根據(jù)采樣定理選擇信號的采樣率為8 kHz。語音信號的一個特點在于他的“短時性”,有時在一個短時段呈現(xiàn)隨機噪聲的特性,而另一段表現(xiàn)周期信號的特性,或二者兼而有之。語音信號的特征是隨時間變化的,只有一段時間內(nèi),信號才表現(xiàn)穩(wěn)定一致的特征,一般來說短時段可取5~50 ms,因此語音信號的處理要建立在其“短時性”上,系統(tǒng)將語音信號幀長設(shè)為20 ms,幀移設(shè)為10 ms,則每幀數(shù)據(jù)為160×16 b。
3.2 語音信號的采集和播放
語音采集和播放芯片采用的是TI公司生產(chǎn)的TLV320AIC23B,TLV320AIC23B的模數(shù)轉(zhuǎn)換(ADC)和數(shù)模轉(zhuǎn)換(DAC)部件高度集成在芯片內(nèi)部,芯片采用8 k采樣率,單聲道模擬信號輸入,雙聲道輸出。TLV320AIC23具有可編程特性,DSP可通過控制接口來編輯該器件的控制寄存器,而且能夠編譯SPI,I2C兩種規(guī)格的接口,TLV320AIC23B與DSP5509的電路連接如圖2所示。
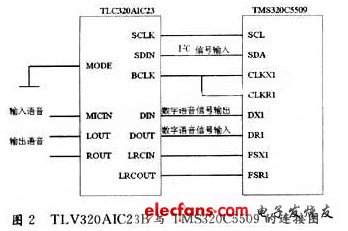
DSP采用I2C口對TLV320AIC23的寄存器進行設(shè)置。當MODE=O時,為I2C規(guī)格的接口,DSP采用主發(fā)送模式,通過I2C口對地址為0000000~0001111的11個寄存器進行初始化。I2C模式下,數(shù)據(jù)是分為3個8 b寫入的。而TLV320AIC23有7位地址和9位數(shù)據(jù),也就是說,需要把數(shù)據(jù)項上面的最高位補充到第二個8 B中的最后一位。
MCBSP串口通過6個引腳CLKX,CLKR,F(xiàn)SX,F(xiàn)SR,DR和CX與TLV320AIC23相連。數(shù)據(jù)經(jīng)MCBSP串口與外設(shè)的通信通過DR和DX引腳傳輸,控制同步信號則由CLKX,CLKR,F(xiàn)SX,F(xiàn)SR四個引腳實現(xiàn)。將MCBSP串口設(shè)置為DSP Mode模式,然后使串口的接收器和發(fā)送器同步,并且由TLV320AIC23的幀同步信號LRCIN,LRCOUT啟動串口傳輸,同時將發(fā)送接收的數(shù)據(jù)字長設(shè)定為32 b(左聲道16 b,右聲道16 b)單幀模式。
3.3 語音識別程序模塊的設(shè)計
為了實現(xiàn)機器人對非特定人語音指令的識別,系統(tǒng)采用非特定人的孤立詞識別系統(tǒng)。非特定人的語音識別是指語音模型由不同年齡、不同性別、不同口音的人進行訓(xùn)練,在識別時不需要訓(xùn)練就可以識別說話人的語音[2]。系統(tǒng)分為預(yù)加重和加窗,短點檢測,特征提取,與語音庫的模式匹配和訓(xùn)練幾個部分。【詳情請參閱:基于DSP和FPGA的機器人聲控系統(tǒng)設(shè)計 】
預(yù)知更多機器人DIY相關(guān)設(shè)計大全,請右戳:http://www.nxhydt.com/zhuanti/DIY_Robot.html
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論