 電子發(fā)燒友App
電子發(fā)燒友App


國外牛人DIY超聲波導航坦克機器人(圖文)


本文導航
- 第 1 頁:國外牛人DIY超聲波導航坦克機器人(圖文)
- 第 2 頁:超聲波傳感器HC SR04
- 第 3 頁:降壓可調(diào)轉(zhuǎn)換器電源模塊
- 第 4 頁:DIY機器人功能參數(shù)
- 第 5 頁:DIY機器人過程參數(shù)一
- 第 6 頁:DIY機器人過程參數(shù)二
- 第 7 頁:太陽能充電池驅(qū)動機器人改裝設(shè)想
- 第 8 頁:給程序添加一個電源管理功能
- 機器人(200950)
- 電子制作(150562)
- 超聲波傳感器(35575)
- 前沿技術(shù)(40703)


相關(guān)推薦
解析超聲波傳感器在機器人探測系統(tǒng)中的應用
針對自主移動機器人沿墻導航過程,設(shè)計一種收發(fā)一體式超聲波傳感器與步進電機組成的探測系統(tǒng)。
2014-07-08 16:55:12 1288
1288
1288DIY一個打招呼的烏龜機器人
(Arduino IDE自帶)和NewPing.h(點擊這里下載)。我首先定義了觸發(fā)引腳、相應引腳以及超聲波傳感器的最大距離;之后我又定義了一個布爾變量,可以用來切換機器人的自動模式。之后又定義了舵機。在設(shè)置函數(shù)中
2015-12-11 17:26:04
DIY設(shè)計四足蜘蛛機器人
描述“邁爾斯”開源四足蜘蛛機器人它使用 8 個 SG90 / MG90 伺服電機 作為腿部的執(zhí)行器,由一個定制的 PCB 組成,用于為伺服系統(tǒng)供電和控制,而 Arduino Nano.PCB 具有
2022-08-09 06:30:29
機器人關(guān)節(jié)用什么電機?
機器人關(guān)節(jié)是機器人各個零部件之間發(fā)生相對運動的機構(gòu)。關(guān)節(jié)之中,單獨驅(qū)動的為主動關(guān)節(jié),反之稱為從動關(guān)節(jié)。機器人關(guān)節(jié)模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關(guān)節(jié)
2021-05-27 11:26:11
機器人應用的超聲波傳感器解決方案
機器人通過各種傳感器系統(tǒng)感知外界環(huán)境和自身狀態(tài),在復雜的環(huán)境自主移動并完成相應的任務(wù),在眾多傳感器中超聲波傳感器以其獨有的特征而被青睞。對于機器人的應用來說,超聲波傳感器主要用來探測物體的距離以及
2020-08-18 10:23:23
機器人系統(tǒng)是什么?
機器人的移動通常是從管理機器人總體任務(wù)進度的中央處理器發(fā)出位置變化請求時開始的。導航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務(wù)目標。
2019-09-10 10:44:32
機器人餐廳
機器人、地面送餐機器人、空中傳菜機器人、迎賓機器人等20個各式機器人。它們長相色彩各異,個頭1.3至1.6米不等,可以呈現(xiàn)10多種面部表情,會講簡單語句,送餐機器人都裝有超聲波探測裝置進行避障。2013
2014-07-26 09:11:04
超聲波傳感可用于無人機應用的原因
無人機越來越受歡迎,用于拍攝震撼的的片段、運送救援物資,甚至用于競賽。大多數(shù)無人機使用各種傳感技術(shù)實現(xiàn)自主導航、碰撞檢測和許多其他功能。超聲波傳感尤其有助于無人機著陸、懸停和地面跟蹤。無人機降落輔助
2022-11-11 08:12:22
超聲波傳感器在機器人中的應用
`隨著傳感器技術(shù)的推廣應用,機器人的發(fā)展也備受關(guān)注,同時也因為傳感器技術(shù)的進步,使得工業(yè)機器人的發(fā)展有了支持。在機器人中使用的超聲波傳感器是一個電子模塊,測量距離在3cm到400cm之間。它可
2018-08-09 15:19:59
超聲波傳感器在機器人避障中有什么作用
、醫(yī)療服務(wù)、家庭娛樂、軍事和航天等其他領(lǐng)域。機器人是工業(yè)及非產(chǎn)業(yè)界的重要生產(chǎn)和服務(wù)性設(shè)備,也是先進制造技術(shù)領(lǐng)域不可缺少的自動化設(shè)備。本文主要針對超聲波傳感器在機器的應用做一個簡單的介紹。 移動機器人要
2019-02-27 23:29:58
超聲波傳感器的優(yōu)勢及原理
超聲波傳感器有哪些優(yōu)勢 超聲波傳感器是將超聲波信號轉(zhuǎn)換成其他能量信號(通常是電信號)的傳感器。它在生產(chǎn)生活中較為常見,像汽車的倒車雷達、機器人自動避障行走、建筑施工工地以及液位、井深、管道
2020-06-19 11:46:53
超聲波傳感器的優(yōu)缺點分析
的,可以在室內(nèi)或室外使用。超聲波傳感器可以處理[機器人]避免碰撞,并且只要不太快就會移動。超聲波傳感器被廣泛使用,可以可靠地應用于谷物箱傳感應用,水位傳感,[無人機應用]和當?shù)刂苯硬宛^或銀行的感應車。超聲波
2023-04-21 09:09:05
超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波
單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波
2016-04-14 23:51:47
超聲波模塊的相關(guān)資料分享
超聲波模塊原理此模塊性能穩(wěn)定,測度距離精確,模塊高精度,盲區(qū)小。產(chǎn)品應用領(lǐng)域: 機器人避障物體測距液位檢測公共安防 停車場檢測 。接線方式:VCC、trig(控制端)、echo(接收端)、 GND
2021-11-18 09:04:00
超聲波測距儀的設(shè)計及程序
的距離信息(距離和方向)。本文所介紹的三方向(前、左、右)超聲波測距系統(tǒng),就是為機器人了解其前方、左側(cè)和右側(cè)的環(huán)境而提供一個運動距離信息。 超聲波測距原理 1、 超聲波發(fā)生器 為了研究和利用超聲波
2008-10-15 15:23:13
超聲波測距原理
1.超聲波測距原理超聲波是利用反射的原理測量距離的,被測距離一端為超聲波傳感器,另一端必須有能反射超聲波的物體。測量距離時,將超聲波傳感器對準反射物發(fā)射超聲波,并開始計時,超聲波在空氣中傳播
2021-07-21 07:01:00
超聲波測距模塊代碼的編寫和理解
超聲波測距模塊在平時做電子產(chǎn)品、機器人、智能設(shè)備中的應用里還是非常常用的,使用非常簡單,但是代碼的編寫和理解其實并不容易,在這里想和大家交流一下。有不同的意見和建議可以給我留言或者私信我。
2021-11-18 08:03:48
超聲波測距電路設(shè)計
超聲波測距電路設(shè)計由于超聲波指向性強,能量消耗緩慢,在介質(zhì)中傳播的距離較遠,因而超聲波經(jīng)常用于距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實現(xiàn)。利用超聲波檢測往往比較迅速、方便、計算簡單
2009-12-15 16:10:31
超聲波測距系統(tǒng)畢設(shè)
簡單、易于實現(xiàn)實時控制,并且在測量精度方面能達到工業(yè)實用的指標要求,因此為了使移動機器人能夠自動躲避障礙物行走,就必須裝備測距系統(tǒng),以使其及時獲取距障礙物的位置信息(距離和方向)。因此超聲波測距在
2016-04-18 20:56:27
超聲波測距系統(tǒng)設(shè)計
)。本文所介紹的三方向(前、左、右)超聲波測距系統(tǒng),就是為機器人了解其前方、左側(cè)和右側(cè)的環(huán)境而提供一個運動距離信息。 二、 超聲波測距原理 1、 超聲波發(fā)生器 為了研究和利用超聲波,人們已經(jīng)設(shè)計和制成
2008-10-15 15:25:58
超聲波電機在微型智能機器人領(lǐng)域的應用
、工作電流增大、工作效率降低等一系列問題。如今隨著中國科學技術(shù)的不斷發(fā)展,特別是與傳統(tǒng)電磁電機有著不同驅(qū)動機理和結(jié)構(gòu)的超聲波電機的出現(xiàn),使其為直接驅(qū)動機器人提供了理想的執(zhí)行器。
2020-12-10 11:09:26
超聲波避障技術(shù)助力智能掃地機器人的市場
基于超聲波避障技術(shù)是建立在獲取機器人前方障礙物的距離和位置信息上,故超聲波避障技術(shù)主要運用超聲波傳感器,根據(jù)超聲波測距原理,結(jié)合矩陣式結(jié)構(gòu)設(shè)計理念的數(shù)據(jù)融合對機器人前方障礙物的距離和位置進行定位。
2020-05-11 07:23:15
HC-SR04超聲波具有哪些參數(shù)應用
引腳電平函數(shù)三、程序?qū)崿F(xiàn):運行效果:一、HC-SR04超聲波產(chǎn)品應用領(lǐng)域:1、機器人避障 2、物體測距 3、液位檢測 4、公共安防 5、停車場檢測超聲波傳感器模塊上面通常有兩個超聲波元器件,一個用于發(fā)射,一個用于接收。電路板上有4個引腳: VCC (正極)、Trig (觸發(fā))、Echo (回
2022-01-07 06:08:09
HC-SR04超聲波模塊的工作原理是什么
,模塊高精度,盲區(qū)小等特點。此模塊可用于機器人與小車避障,物體測距等,是現(xiàn)在高校比賽中常用的一款避障傳感器。二、超聲波測距原理超聲波測距原理是利用超聲波在空氣中的傳播速度為已知,測量聲波在發(fā)射后遇到障礙物反射回來的時間,根據(jù)發(fā)射和接收的時間差計算出發(fā)射點到障礙物的實際距離。其測距公式為:L=V?T{L
2021-07-19 09:36:34
HC-SR04超聲波測距模塊原理
、HC-SR04超聲波測距模塊原理1.模塊簡介HC-SR04超聲波模塊常用于機器人避障、物體測距、液位檢測、公共安防、停車場檢測等場所。HC-SR04超聲波模塊主要是由兩個通用的壓電陶瓷超聲傳感器,并加外圍信號
2021-12-06 07:14:23
【Rico Board申請】雙模式智能機器人
。雙模式智能機器人的設(shè)計:模式一、無人導航,加入模糊神經(jīng)網(wǎng)絡(luò)的蔽障算法實現(xiàn)自動蔽障。二、遙控模式,基于無線遙控模塊(預計使用藍牙),完成遙控導航。4。硬件模塊預計主要會涉及:藍牙、超聲波雷達、直流電機
2016-10-20 15:50:35
【mBot申請】智能循聲機器人
申請理由:2015年暑假,想基于stm32制作能夠循聲定位的機器人,可是最后定位模塊的失敗,使整個項目未能按照設(shè)想完成。希望能借助本套件,用超聲波和無線模塊實現(xiàn)定位。而且很重要的是項目資金不充裕
2015-10-29 14:14:41
【卡酷機器人】試用三:超聲波模塊
本帖最后由 數(shù)碼小葉 于 2015-3-4 15:08 編輯
卡酷機器人有著可愛的造型,其一就是那雙眼睛,(測試階段,成品圖來源于網(wǎng)絡(luò))而實際就是一個超聲波傳感器,利用這個超聲波傳感器
2015-02-21 13:54:11
中國服務(wù)機器人定位導航技術(shù)現(xiàn)狀分析
機器人定位導航方式目前機器人常用的定位導航方式有激光定位導航、視覺定位導航、紅外線定位導航、超聲波定位導航、GPS全球定位導航等。1.激光定位導航激光雷達+SLAM技術(shù)相結(jié)合的激光定位導航主要是通過對目標
2018-10-11 17:49:40
什么是超聲波測距?有何特點
自動控制、建筑工程測量和機器人視覺識別等領(lǐng)域應用非常廣泛。超聲波測距一般采用渡越時間法。超聲波測距的實質(zhì)是時間的測量,即:用超聲脈沖激勵超聲探頭向外發(fā)射超聲波,同時接收從被測物體反射回來的超聲波(簡稱
2022-01-06 08:04:11
什么是龍人四足機器人?
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅(qū)動,能實現(xiàn)兩種步態(tài)行走。配有三個超聲波,實現(xiàn)大角度智能避障。標準演示程序有5個可愛的表演動作。重要技術(shù)點: 四足機器人的行走步態(tài)設(shè)計、舵機的梯形速度控制、多路舵機的協(xié)調(diào)控制
2016-03-24 16:17:53
企鵝機器人是怎么樣的?
,可以實現(xiàn)企鵝機器人對前方障礙物的識別,從而實現(xiàn)企鵝機器人的智能避障和互動表演。重要技術(shù)點:行走結(jié)構(gòu)、行走步態(tài)、語音播放、超聲波導航。
2016-03-29 17:29:52
變壓器 | TDK推出適合超聲波應用的緊湊型EP 6變壓器
TDK集團隆重推出適合超聲波應用的全新B78416A*系列緊湊型愛普科斯 (EPCOS) EP6變壓器。新系列元件為表面安裝 (SMD) 型,有五種型號供選擇,覆蓋1:1:8.42至1:1:15
2022-02-17 16:04:14
可視化機器人
上位機控制的遠程控制,在上位機上可以實時顯示機器人的前進視角,該機器人上安裝有超聲波等傳感器,可以自動越過障礙,自動控制前進運行。遠程采用WiFi與電腦通信。供電采用的是7.2伏的鉻鎳電池。手柄采用的是NRF24L01模塊進行雙機通信。
2016-07-31 13:14:17
四足機器人
`這是創(chuàng)客集結(jié)號的作品四足機器人身體和四足都是通過3D打印技術(shù)打印出來的,通過自己安裝連接上超聲波傳感器,制作成功的四足機器人完全就很了。`
2018-09-29 09:55:09
基于51單片機的超聲波測距防撞報警系統(tǒng)控制電路設(shè)計資料分享
應用于各種工業(yè)領(lǐng)域,如工業(yè)自動控制,建筑工程測量和機器人視覺識別等方面。超聲波作為一種檢測技術(shù),采用的是非
2021-11-10 08:29:30
基于機器視覺的智能導覽機器人控制系統(tǒng)設(shè)計
。3.1.1 控制協(xié)調(diào)層的硬件實現(xiàn) 機器人傳感器的選取應取決于機器人的工作需要和應用特點。這里選用超聲波傳感器、紅外傳感器、電子羅盤及陀螺儀,采集機器人周圍環(huán)境信息,為機器人避障、路徑規(guī)劃提供幫助
2019-07-04 08:30:00
基于超聲波傳感器的測距系統(tǒng)設(shè)計
是移動機器人研究的一個基本問題。障礙物與機器人之間距離的獲得是研究安全避障的前提,超聲波傳感器以其信息處理簡單、價格低廉、硬件容易實現(xiàn)等優(yōu)點,被廣泛用作測距傳感器。本超聲波測距系統(tǒng)選用了SensComp
2009-12-15 10:20:19
基于超聲波傳感器的自主移動機器人探測系統(tǒng)
摘要:針對自主移動機器人沿墻導航過程,設(shè)計一種收發(fā)一體式超聲波傳感器與步進電機組成的探測系統(tǒng)。介紹此系統(tǒng)的結(jié)構(gòu)和軟硬件設(shè)計。實驗總結(jié)超聲波波束與目標物的入射角大小對測距穩(wěn)定性的影響,提出搜尋離墻
2018-11-02 16:04:48
基于超聲波傳感器的自主移動機器人的探測系統(tǒng)
單獨導通作為基準坐標,I,Ⅱ同時導通用來判斷旋轉(zhuǎn)方向,Ⅱ單通作為機器人沿墻回歸時的導航基準。 通過步進電機帶動一體式超聲波傳感器轉(zhuǎn)動,以傳感器中軸垂直于機器人車體的方向作為其自身姿態(tài)調(diào)整的坐標
2012-01-19 13:45:49
基于超聲波傳感器的航模應用
一款非常出色的低成本通用型傳感器。 行人檢測超聲波傳感器MB1010應用和操行人檢測安全運動檢測可電池供電自動導航教育和愛好機器人學避免碰撞 行人檢測超聲波傳感器MB1010波束圖: 行人檢測超聲波傳感器MB1010選型:
2019-03-01 04:53:41
基于ARM處理器的吸塵機器人硬件設(shè)計
傳感器、超聲波等組成多傳感器系統(tǒng)。在機器人的上方裝有紅外接收傳感器,底盤邊緣均勻分布裝有接近傳感器,用來檢測障礙物;在機器人的前方裝有碰撞傳感器;前方和左右裝有超聲波測距傳感器,用來檢測周圍環(huán)境
2018-11-06 16:01:27
基于AT89S52單片機超聲波測距系統(tǒng)電路設(shè)計方案
產(chǎn)生超聲波,目前較為常用的是壓電式超聲波傳感器。由于超聲波具有易于定向發(fā)射,方向性好,強度好控制,對色彩、光照度不敏感,反射率高等特點,因此被廣泛應用于無損探傷,距離測量、距離開關(guān)、汽車倒車防撞、智能機器人等領(lǐng)域。
2020-08-11 07:27:34
基于STM32超聲波測距設(shè)計的合集
較小、反射能力較強[1]。且超聲波測距系統(tǒng)結(jié)構(gòu)簡單、電路容易實現(xiàn)、成本低、速度快,所以在工業(yè)自動控制、建筑工程測量和機器人視覺識別等領(lǐng)域應用非常廣泛,它具有非接觸式測量、精度高、范圍寬和安裝維護方便等
2018-09-05 16:13:22
基于STM32的超聲波測距系統(tǒng)設(shè)計
超聲波測距是一種典型的非接觸測量方式。超聲波在氣體、液體及固體中以不同速度傳播,定向性好、能量集中、傳輸過程中衰減較小、反射能力較強。且超聲波測距系統(tǒng)結(jié)構(gòu)簡單、電路易實現(xiàn)、成本低、速度快,所以在工業(yè)
2022-01-06 06:56:42
基于atmegal16單片機的超聲波測距短信上傳設(shè)計
,并且在測量精度方面能達到工業(yè)實用的要求,因此在移動機器人研制上也得到了廣泛的應用。1、基于atmegal16單片機的超聲波測距短信上傳設(shè)計-超聲波-GSM-(原理圖+程序源碼)2017-...
2021-12-08 06:37:46
基于atmegal16單片機的超聲波測距短信上傳設(shè)計
,并且在測量精度方面能達到工業(yè)實用的要求,因此在移動機器人研制上也得到了廣泛的應用。1、基于atmegal16單片機的超聲波測距短信上傳設(shè)計-超聲波-GSM-(原理圖+程序源碼)2017-507
2021-07-13 08:16:19
如何搭建實體機器人ros底盤
底盤:與ros相關(guān)的控制系統(tǒng)部分。底盤上的STM32主控板需要擁有如下處理功能。執(zhí)行機構(gòu): 兩個直流電機帶動主動輪。驅(qū)動系統(tǒng):電源子系統(tǒng):維護整個機器人的電源需求電機驅(qū)動: 電機驅(qū)動模塊(控制信號 - > 電信號) + 電機控制模塊 (電信號 -> 控制信號)傳感器接口:超聲波、編
2022-01-20 07:36:08
微型機器人關(guān)節(jié)使用超聲波電機的優(yōu)勢
`隨著中國科學技術(shù)發(fā)展迅猛,未來中國將成為為微型智能機器人大國。如今智能機器人需求量不斷增長,其控制系統(tǒng)和自動化主要的產(chǎn)品超聲波電機的需求也將大幅度增長,機器人手指關(guān)節(jié)用超聲波電機作為微型智能機器人
2020-11-02 11:21:13
微型智能機器人手指關(guān)節(jié)使用超聲波電機的優(yōu)勢
超聲波電機一般安裝在機器人手指關(guān)節(jié)處,機器人的關(guān)節(jié)驅(qū)動離不開伺服系統(tǒng),機器人關(guān)節(jié)越多,對柔性及精準度就越高,所需的超聲電機數(shù)量就越多。機器人對關(guān)節(jié)驅(qū)動電機的要求非常嚴格,因為超聲波電機具有以下優(yōu)勢
2020-11-24 11:30:02
掃地機器人自動回充的技術(shù)原理是什么
掃地機器人自動回充,有多種技術(shù)原理,有采用雷達定位的、采用藍牙定位的、紅外線定位的。在掃地機器人領(lǐng)域主要是利用這3種定位技術(shù)。一、采用超聲波定位一種掃地機器人是采用超聲波定位來尋找充電基座的,超聲波
2021-09-14 06:02:26
搬運碼垛教育機器人-鷗鵬科技
導航,前置超聲波傳感器對料塊進行方向和距離定位,安裝在手爪的顏色傳感器識別料塊顏色進行分類,三自由度機械手完成碼垛任務(wù)。重要技術(shù)點: 機器人循線、機械手運動控制、超聲波測距定位和顏色識別。`
2016-04-01 14:18:48
擂臺機器人
紅外遙控擂臺機器人是中國教育機器人大賽擂臺賽的標準競賽平臺。機器人利用前端QTI傳感器探測黑色場地,避免機器人跑出場地。通過紅外遙控器遙控機器人,將對手推出黑色場地。 重要技術(shù)點:場地邊沿探測、紅外遙控解碼、超聲波搜索算法、紅外搜索算法
2016-03-24 10:35:37
智能搬運機器人
智能搬運機器人能實現(xiàn)小型柱狀物料顏色識別及搬運,能夠輕松完成中國教育機器人大賽的智能搬運競賽任務(wù)。機器人的移動由兩輪伺服電機驅(qū)動,萬向輪協(xié)助轉(zhuǎn)向,并用多個循線傳感器輔助完成復雜路線導航,前置超聲波
2016-03-24 10:32:24
智能搬運機器人的功能介紹-鷗鵬科技
中國教育機器人大賽的智能搬運競賽任務(wù)。機器人的移動由兩輪伺服電機驅(qū)動,萬向輪協(xié)助轉(zhuǎn)向,并用多個循線傳感器輔助完成復雜路線導航,前置超聲波傳感器能對前方進行掃描,實現(xiàn)方向和距離定位,安裝在車體前端的顏色傳感器識別料塊顏色進行分類,并搬到相應顏色區(qū)域。重要技術(shù)點: 機器人循線、超聲波測距定位和顏色識別
2016-04-01 14:55:07
智能高爾夫機器人
原理確定球手位置,并利用超聲波測距原理使機器人與球手始終保持70厘米。該作品用紅外定位使其抗外界干擾能力強,精度高;并具有實用性強,成本低,趣味性強等特點。此項設(shè)計不僅可以運用到高爾夫球場,同樣可以應用到
2013-10-27 18:20:36
服務(wù)機器人是如何實現(xiàn)自主定位導航的?
服務(wù)機器人想要自由行走,實現(xiàn)自主定位導航是關(guān)鍵,自主定位導航包括定位、建圖與路徑規(guī)劃。SLAM作為機器人定位導航的核心技術(shù),正不斷獲得行業(yè)內(nèi)的重視,但SLAM只是完成定位與地圖創(chuàng)建這兩件事,它并不
2018-10-10 16:29:21
求分享,有沒有高手有DIY超聲波模塊的程序?
這幾天玩了一下超聲波模塊HC_SR04,就想了解下這么模塊程序是如何處理接收的數(shù)據(jù),有沒有高手自己DIY過超聲波模塊,寫過全套的程序。
2023-10-26 07:50:04
移動機器人超聲波測距功能設(shè)計
障礙物的位置給直流電機控制信號進行避障導航。觸摸屏中的圖形界面中含有機器人的指令設(shè)置, 可以設(shè)置運行速度,圖像采集與超聲波模塊的打開與關(guān)閉,是否開啟機器人模糊算法運行軌跡還是使用普通的PID 調(diào)節(jié), 這使
2021-10-08 09:41:30
解讀機器人的幾大避障技術(shù)
和位置等信息,因此傳感器技術(shù)在移動機器人避障中起著十分重要的作用。機器人避障需使用的傳感器有激光雷達、深度相機、超聲波傳感器、物理碰撞、跌落檢測等。目前市面上常見的機器人避障基本都采用到激光雷達,但
2018-12-12 16:04:42
請問怎么設(shè)計一種室外移動機器人組合導航定位系統(tǒng)?
怎么設(shè)計一種室外移動機器人組合導航定位系統(tǒng)?如何實現(xiàn)室外移動機器人組合導航定位系統(tǒng)的硬件設(shè)計?如何實現(xiàn)室外移動機器人組合導航定位系統(tǒng)的軟件設(shè)計?
2021-04-19 10:50:33
高性能人形機器人——nao機器人
` nao是一個高58公分的機器人,是AldebaranRoboticsTM公司花費了三年時間的研究成果。它是各種硬件和軟件以獨特的方式組裝成的一種產(chǎn)品,并有著討人喜歡的外形設(shè)計。它可在Linux
2015-02-13 09:41:38
鷗鵬機器人-龍人六足視頻演示
龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現(xiàn)12個電機協(xié)調(diào)的控制行走,實現(xiàn)對六足昆蟲的仿生模擬。頭部有三個超聲波,實現(xiàn)大角度范圍的避障。重要技術(shù)點:六條腿協(xié)調(diào)前進 、后退、轉(zhuǎn)彎的算法,超聲波導航和避障
2016-03-23 17:49:48
鷗鵬機器人還有六足的,帶你去見識一下哦
龍人六足機器人龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現(xiàn)12個電機協(xié)調(diào)的控制行走,實現(xiàn)對六足昆蟲的仿生模擬。頭部有三個超聲波,實現(xiàn)大角度范圍的避障。重要技術(shù)點:六條腿協(xié)調(diào)前進、后退、轉(zhuǎn)彎的算法,超聲波導航和避障
2016-03-24 16:25:46
超聲波導盲器的設(shè)計
采用AT89C51 單片機作為控制器,利用超聲測距的原理,設(shè)計了一種超聲波導盲裝置。該裝置可以對盲人前面道路上的障礙物進行距離探測并把障礙物距離信息轉(zhuǎn)換成聲音提示,盲
2009-08-07 09:53:02 62
62
62超聲波移動機器人導航設(shè)計方法
摘要: 采用新型的超聲波傳感器,設(shè)計并開發(fā)基于ARM9 與嵌入式linux 為平臺的輪式移動機器人平臺的下的未知環(huán)境的避障導航系統(tǒng)。本文重點介紹該超聲波傳感器的實現(xiàn)原理以及在
2012-05-11 15:06:292362
2362
外國牛人DIY超聲波傳感器檢測避障機器人(圖文)
電子發(fā)燒友網(wǎng)訊:這是我做的第一個機器人,我會詳細記錄下每個程序,以方便那些初學者借鑒,準確說來我做的是一個履帶式的,由picaxe28x1控制,超聲波傳感器檢測的障礙物躲避機器
2012-07-27 15:52:3726581
26581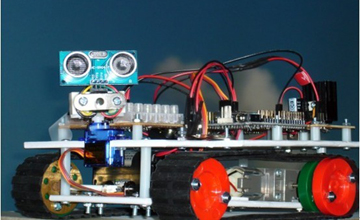
采用超聲波的移動機器人導航設(shè)計方法[圖]
摘要: 采用新型的超聲波傳感器,設(shè)計并開發(fā)基于ARM9 與嵌入式linux 為平臺的輪式移動機器人平臺的下的未知環(huán)境的避障導航系統(tǒng)。本文重點介紹該超聲波傳感器的實現(xiàn)原理以及在機器人平臺中的整個軟件
2018-01-17 22:39:10298
298基于單接收頭的超聲波多目標測距[圖]
超聲波測距傳感器以其測量精度高、響應快和價格低廉而廣泛應用在工業(yè)現(xiàn)場測距、移動機器人導航和定位等場合。超聲波測距傳感器常用的方式是1個發(fā)射頭對應1個接收頭,也有多個發(fā)射頭對應1個接收頭。它們共同之處
2018-01-18 05:39:42356
356超聲波導盲儀設(shè)計原理是什么?超聲波電子導盲手杖的設(shè)計資料概述
的電子式超聲波導盲系統(tǒng)的基礎(chǔ)上,應用回聲定位原理,通過發(fā)送超聲波,然后獲得并分析障礙物的回波信息,研制了一套超聲波導盲系統(tǒng)。本系統(tǒng)采用AT89S52單片機作為控制器, 利用超聲測距的原理, 設(shè)計了一種超聲波導盲裝置,
2018-08-27 08:00:0028
28用于機器人自動導航的超聲波傳感器
,尤其是點到點自主移動的問題,這需要更多的技術(shù)支持。下面我們通過用于機器人自動導航的超聲波傳感器這篇文章來了解機器人自動導航的相關(guān)技術(shù)支持。?眾所周知,在動物界中螞蟻和蜜蜂都是出色的導航員。撒哈拉沙漠螞蟻
2018-08-28 15:55:351501
1501外國科學家研發(fā)出利用超聲波導航的自主機器人
據(jù)Science官網(wǎng)報道,國外研究人員研發(fā)出一款自主的機器人Robat,它可以像蝙蝠一樣利用超聲波導航。
2018-09-11 16:32:504005
4005機器人自動導航的超聲波傳感器介紹
,尤其是點到點自主移動的問題,這需要更多的技術(shù)支持。下面我們通過用于機器人自動導航的超聲波傳感器這篇文章來了解機器人自動導航的相關(guān)技術(shù)支持。 眾所周知,在動物界中螞蟻和蜜蜂都是出色的導航員。撒哈拉沙漠螞蟻可以在高
2018-09-23 07:07:003029
3029完全自主的機器人可以通過超聲波導航 就像蝙蝠一樣
近日,一個研究小組表示,他們創(chuàng)造了第一個完全自主的機器人,可以通過超聲波導航,就像蝙蝠一樣。
2018-11-05 10:33:081284
1284基于FPGA的超聲波測距系統(tǒng)設(shè)計詳解
超聲波測距是一種非接觸式測量技術(shù),具有定向性好以及對色彩、光照度、外界光線和電磁場不敏感的優(yōu)點,當被測物處于黑暗、有灰塵或煙霧、強電磁干擾及有毒等惡劣的環(huán)境時,超聲波有很強的適應性。因此超聲波傳感器廣泛用于工業(yè)測量、安全預警、車輛避障、自動導航以及現(xiàn)場機器人等相關(guān)領(lǐng)域。
2019-03-22 08:42:556818
6818
超聲波換能器原理
超聲波換能器,其實就是頻率與其諧振頻率相同的壓電陶瓷,利用的是材料的壓電效應將電能轉(zhuǎn)換為機械振動。一般情況下,先由超聲波發(fā)生器產(chǎn)生超聲波,經(jīng)超聲波換能器將其轉(zhuǎn)換為機械振動,再經(jīng)超聲波導出裝置、超聲波接收裝置便可產(chǎn)生超聲波。
2019-08-20 14:46:2135763
35763超聲波電機在微型智能機器人手指關(guān)節(jié)中的應用優(yōu)勢
隨著國內(nèi)技術(shù)的不斷發(fā)展,成為微型智能機器人大國不再是癡人說夢。如今國內(nèi)智能機器人需求量在不斷增長,作為核心部件的超聲波電機也將大幅度增長,微型智能機器人手指關(guān)節(jié)用超聲波電機的優(yōu)勢有哪些呢? 超聲波
2020-11-24 11:32:121993
1993移動機器人超聲波導航定位技術(shù)
通過接收自身發(fā)射的超聲波反射信號,根據(jù)超聲波發(fā)出及回波接收時間差及傳播速度,計算出傳播距離S,就能得到障礙物到機器人的距離,即有公式:S=Tv/2式中,T—超聲波發(fā)射和接收的時間差;v—超聲波在介質(zhì)中傳播的波速。
2020-12-10 09:25:223567
3567使用超聲波傳感器和Arduino構(gòu)建一個避障機器人
我們將使用超聲波傳感器和 Arduino 構(gòu)建一個避障機器人。這里使用超聲波傳感器通過計算機器人與障礙物之間的距離來感知路徑中的障礙物。如果機器人發(fā)現(xiàn)任何障礙物,它會改變方向并繼續(xù)移動。
2022-09-08 15:14:002497
2497
超聲波測距原理 超聲波測距離傳感器接線方法
于許多領(lǐng)域,例如工業(yè)自動化、機器人導航、安防監(jiān)控等。本文將著重介紹超聲波測距的原理,并詳細說明超聲波測距傳感器的接線方法。 一、超聲波測距原理 聲波基礎(chǔ)知識 在介紹超聲波測距原理之前,我們需要了解一些聲波的基礎(chǔ)
2024-01-22 15:22:33354
354




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論