 電子發(fā)燒友App
電子發(fā)燒友App


直流電動(dòng)機(jī)最初起動(dòng)時(shí),勵(lì)磁繞組建立一個(gè)磁場(chǎng),電樞電流產(chǎn)生另一個(gè)磁場(chǎng),兩磁場(chǎng)相互作用,起動(dòng)電動(dòng)機(jī)運(yùn)行。電樞繞組在磁場(chǎng)中旋轉(zhuǎn),因此產(chǎn)生發(fā)電機(jī)效應(yīng)。實(shí)際上旋轉(zhuǎn)電樞產(chǎn)生一個(gè)感應(yīng)電動(dòng)勢(shì),與電樞電壓極性相反,這種自感應(yīng)電動(dòng)勢(shì)稱(chēng)為反電動(dòng)勢(shì)。emf通常表示電動(dòng)勢(shì),但由于它不是物理意義上的“力”,所以起不到任何幫助,但反電動(dòng)勢(shì)仍然在電動(dòng)機(jī)里作為自感應(yīng)電動(dòng)勢(shì)應(yīng)用。反電動(dòng)勢(shì)也稱(chēng)為反抗電動(dòng)勢(shì),當(dāng)電動(dòng)機(jī)勻速運(yùn)行時(shí)可以顯著地減小電樞電流。
怎樣克服反電動(dòng)勢(shì)和利用反電動(dòng)勢(shì)
根據(jù)電磁定律,當(dāng)磁場(chǎng)變化時(shí),附近的導(dǎo)體會(huì)產(chǎn)生感應(yīng)電動(dòng)勢(shì),其方向符合法拉第定律和楞次定律,與原先加在線圈兩端的電壓正好相反,這個(gè)電壓就是反電動(dòng)勢(shì)。電動(dòng)機(jī)的轉(zhuǎn)子轉(zhuǎn)動(dòng)切割磁力線產(chǎn)生一個(gè)感應(yīng)電勢(shì),其方向與外加電壓相反,故稱(chēng)為電機(jī)“反電動(dòng)勢(shì)”。
電路中存在多個(gè)電源時(shí)可能出現(xiàn)反電動(dòng)勢(shì)。比如同一導(dǎo)軌回路上的兩根金屬棒切割磁場(chǎng)的速度不等,有可能出現(xiàn)反電動(dòng)勢(shì);動(dòng)生電動(dòng)勢(shì)和感生電動(dòng)勢(shì)同時(shí)存在時(shí)可能出現(xiàn)反電動(dòng)勢(shì)。對(duì)線圈而言,其中的通電電流發(fā)生變化時(shí)就會(huì)在線圈的兩端產(chǎn)生反電動(dòng)勢(shì)。比如LC振蕩電路中電感線圈兩端電壓的變化與反電動(dòng)勢(shì)緊密聯(lián)系;電動(dòng)機(jī)線圈在轉(zhuǎn)動(dòng)時(shí),反電動(dòng)勢(shì)也伴隨產(chǎn)生了。
電動(dòng)機(jī)的原理初中就能理解,是將電能轉(zhuǎn)化為機(jī)械能的裝置,通電的線圈在磁場(chǎng)里受到磁場(chǎng)對(duì)它的安培力的作用,使得線圈繞軸旋轉(zhuǎn)。安培力是線圈轉(zhuǎn)動(dòng)的動(dòng)力來(lái)源。如果我們只看到安培力的動(dòng)力作用,電動(dòng)機(jī)的線圈會(huì)不斷地加速,這顯然是不可能的,因?yàn)槊總€(gè)電動(dòng)機(jī)都有一個(gè)最大的轉(zhuǎn)速。這個(gè)最大的轉(zhuǎn)速是如何形成的呢?
通電瞬間線圈幾乎不動(dòng)而電流最大,安培力產(chǎn)生的轉(zhuǎn)動(dòng)力矩遠(yuǎn)大于阻力矩,線圈開(kāi)始轉(zhuǎn)動(dòng)。線圈轉(zhuǎn)動(dòng)時(shí)它就開(kāi)始切割磁感線,在線圈中產(chǎn)生一個(gè)“反向電動(dòng)勢(shì)E反”,與加載在線圈外部的電勢(shì)差U(外部電源提供)相反,起減小電流的作用。開(kāi)始時(shí)刻反向電動(dòng)勢(shì)很小,電流很大,安培力的轉(zhuǎn)動(dòng)力矩較大,轉(zhuǎn)速逐漸加大。隨著轉(zhuǎn)速的加大,反向電動(dòng)勢(shì)增大,線圈中的電流也就減小了,安培力的轉(zhuǎn)動(dòng)力矩減小到與阻力矩抗衡時(shí)就是電動(dòng)機(jī)的最大速度的時(shí)候。
1、電機(jī)反電動(dòng)勢(shì)決定因素
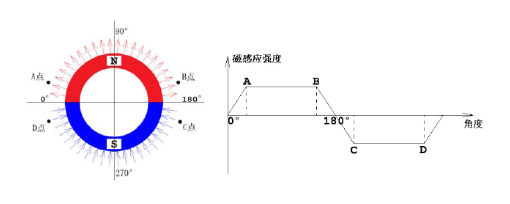
1) 轉(zhuǎn)子角速度
2) 轉(zhuǎn)子磁場(chǎng)產(chǎn)生的磁場(chǎng)
3) 定子繞組的匝數(shù)當(dāng)電機(jī)設(shè)計(jì)完畢,轉(zhuǎn)子磁場(chǎng)與定子繞組的匝數(shù)都是確定的。因此位移決定反電動(dòng)勢(shì)的因數(shù)是轉(zhuǎn)子角速度,或者說(shuō)是轉(zhuǎn)子轉(zhuǎn)速,隨著轉(zhuǎn)子速度的增加,反電動(dòng)勢(shì)也隨之增加。
2、克服反電動(dòng)勢(shì)
通常情況下,只要存在電能與磁能轉(zhuǎn)化的電氣設(shè)備中,在斷電的瞬間,均會(huì)有反電動(dòng)勢(shì),反電動(dòng)勢(shì)有許多危害,控制不好,會(huì)損壞電氣元件。
克服反電動(dòng)勢(shì)最簡(jiǎn)單有效的方法,是在線圈兩端反向并聯(lián)一支二極管,當(dāng)產(chǎn)生反電動(dòng)勢(shì)時(shí),電流通過(guò)二極管釋放,從而保護(hù)控制元件。
這是從大禹治水的方法中學(xué)到的,對(duì)于洪水,要疏導(dǎo),讓它流入大海,而不是堵,堵是堵不住的。采用上述方法以后,磁能轉(zhuǎn)化為電能,電能又全部轉(zhuǎn)化為熱能散發(fā)掉了。
3、利用反電動(dòng)勢(shì)
反電動(dòng)勢(shì)也是有很多用處的,某些情況下是可以有效利用起來(lái)的,下面通過(guò)介紹延時(shí)繼電器工作原理介紹反電動(dòng)勢(shì)的有效利用。

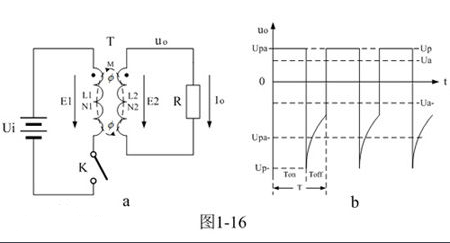
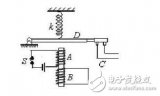
圖示:延時(shí)繼電器構(gòu)成原理圖
圖示是生產(chǎn)中常用的一種延時(shí)繼電器的示意圖。鐵芯上由兩個(gè)線圈A和B。線圈A跟電源連接,線圈B的兩端接在一起,構(gòu)成一個(gè)閉合電路。在拉開(kāi)開(kāi)關(guān)S的時(shí)候,彈簧K并不能立即將銜鐵D拉起,從而使觸頭C(連接工作電路)立即離開(kāi),過(guò)一段時(shí)間后觸頭C才能離開(kāi);延時(shí)繼電器就是這樣得名的。
拉開(kāi)開(kāi)關(guān)S時(shí)使線圈A中電流變小并消失時(shí),鐵芯中的磁通量發(fā)生變化(減小),從而在線圈B中激起感應(yīng)電流,根據(jù)楞次定律,感應(yīng)電流的磁場(chǎng)要阻礙原磁場(chǎng)的減小,這樣,就使鐵芯中磁場(chǎng)減弱得慢些,因此彈簧K不能立即將銜鐵拉起。
注意事項(xiàng)
1、如果電動(dòng)機(jī)工作中由于機(jī)械阻力過(guò)大而停止轉(zhuǎn)動(dòng),這時(shí)沒(méi)有了反電動(dòng)勢(shì),電阻很小的線圈直接接在電源兩端,電流會(huì)很大,很容易燒毀電動(dòng)機(jī)。
2、當(dāng)電動(dòng)機(jī)所接電源電壓比正常電壓低很多時(shí),此時(shí)電動(dòng)機(jī)線圈也不轉(zhuǎn)動(dòng),無(wú)反電動(dòng)勢(shì)產(chǎn)生,電動(dòng)機(jī)也很容易燒壞。
反電動(dòng)勢(shì)也是有很多用處的,比如在CRT電視機(jī)中的行場(chǎng)回掃線消隱電路,便是用的行場(chǎng)逆程脈沖,也就是行場(chǎng)偏轉(zhuǎn)線圈的反電動(dòng)勢(shì)。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論