現代電動車輛中的電控技術原理簡介
現代電動車輛中的電控技術原理簡介
電動車由于儲能設備容量有限,在運行過程中對電能流向管理十分嚴格。精確的電能管理可以延長車輛運行里程,減少電池充電頻率,從而節約運行成本。車載能量管理系統需要隨時監控電池電壓、電機輸出功率以及其它設備的用電情況。同時,電動車電子控制系統的動態信息必須具有實時性,各子系統需要將車輛的公共數據實時共享,如電機轉速、車輪轉換、油門踏板位置等。但不同控制單元的控制周期不同,數據轉換速度、各控制命令優先級也不同,因此需要一種具有優先權競爭模式的數據交換網絡,并且本身具有極高的通信速率。此外,作為一種載人交通工具,電動汽車必須具有極高的運行穩定性,整車通訊系統必須具有很強的容錯能力和快速處理能力。
德國Bosch公司為了解決現代車輛中眾多的控制和數據交換問題,開發出一種CAN(ControllerAreaNetwork)現場總線通訊結構,廣泛應用在常規燃油汽車上,如BENZ、BMW、PORSCHE。同時,CAN總線也被認為是電動車最佳通訊結構,我國“863計劃”關于電動汽車的說明中已經明確提出,新申報的電動車開發項目必須采用CAN總線通訊模式。
CAN總線結構是一種有效支持分布式控制或實時控制的串行通訊網絡。圖1為一個典型的電動汽車CAN總線結構示意圖,包括整車動力部分的主電機控制器、電池組管理系統、人機界面顯示系統等多個設備,這些子系統之間通過CAN進行數據通訊和命令傳輸。每個節點設備都能夠在脫離CAN總線的情況下獨立完成自身系統的運行,從而滿足車輛運行安全性的需要。同時,CAN總線也不會因為某個設備的脫離而出現系統結構崩潰的現象。
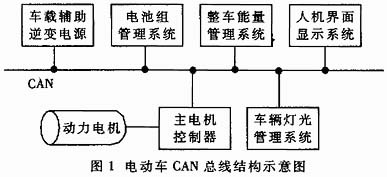
電動車CAN總線結構示意圖
本文介紹的電動車用三相逆變電源屬于圖1中的車載輔助逆變電源。稱為“輔助電源”是因為它的負載為電動車上的一些輔助交流電機,如汽車轉向助力油泵、剎車氣泵、冷卻水循環中的水泵以及空調系統中的壓縮機等。對該三相逆變電源的工作要求是:正常運行情況時獨立維持輔助電機的穩定運行,能夠根據上位機的指令適當調整工作狀態;在負載發生故障(如電機短路)時迅速關系輸出、安全關機,同時能夠通過CAN總線向上位機和其它節點報告自身故障,引發車輛各系統的相關操作(例如:位于儀表臺上的人機界面顯示系統將立即顯示警告信息,報告車輛故障部位,并提示駕駛員減速;而整車能量管理系統則發出命令關閉輔助逆變電源的輸入,并將接收到的錯誤代碼和當前運行參數進行保存,便于維修人員進行故障診斷)。
由此看出,雖然選擇一個通用變頻器進行改裝可以實現車用三相逆變電源的基本功能,但是要做成支持CAN總線各種功能的智能化節點必須從底層進行開發,直接選擇支持CAN總線接口的控制芯片,在控制程序中集成CAN通訊功能,適應整車通訊的要求。
1P8xC592芯片介紹
在電動車用輔助逆變電源的設計中,控制電路不僅要支持CAN總線通訊,還要對負載電壓、電流等模擬量進行檢測,進行各種邏輯判斷,并驅動其它芯片完成三相逆變功能。因此簡單選擇一個單獨的CAN控制器是不夠的,最方便的選擇是使用帶有在片CAN功能的控制器。
P8xC592是由PHILIPS公司開發生產的8位微處理器,主要包括:
·一個80C51中央處理單元(CPU)
·兩個標準的16位定時/計數器
·包括四個捕獲和三個比較寄存器的16位定時器/計數器
·具有8路模擬量輸入的10位A/D變換器
·兩路分辨率為8位的脈沖寬度調制輸出
·具有兩級優先權的15個中斷源
·五組8位I/O端口和一組與A/D變換器模擬量輸入共用的8位輸入口
·與內部RAM進行DMA數據傳送的CAN控制器
·具有總線故障管理功能的1MbpsCAN控制器
·與標準80C51兼容的全雙工UART
P8xC592共有68個管腳,其中包括6個8位I/O口,P0~P3與80C51相同,但P1可以用作一些特殊功能,包括4個捕獲輸入端、外部計數器輸入端、外部計數器復位輸入端和CAN接口的CTX0和CTX1輸出端。并行I/O口P4的功能與P1、P2和P3相同。P5口是不是有輸出功能的并行輸入口,主要用作A/D變換器的模擬量輸入端。
P8xC592內含CAN控制器,包括為實現高性能串行網絡通信所必需的所有硬件,從而能夠控制通信流順利通過CAN協議的局域網。為了避免出現混亂,芯片中增加的CAN控制器對于CPU是作為能夠雙方獨立工作的存儲器映像外圍設備出現的,即可以把P8xC592簡單設想為兩個獨立工作器件的集成體。如果關閉CAN控制器部分的功能,該芯片可以僅作為帶有模擬量A/D轉換的普通8位單片機使用。
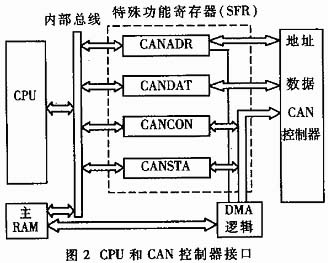
啟用CAN控制器的功能,主要借助四個特殊功能寄存器(SPR)實現,CPU對CAN控制器的控制及其訪問都通過它們完成,接口結構如圖2所示。這四個特殊功能寄存器分別為:(1)地址寄存器(CANADR),CPU通過CANADR讀/寫CAN控制器的驗收碼寄存器;(2)數據寄存器(CANDAT),CANDAT對應由CANADR指向的CAN控制器內部寄存器;(3)控制寄存器(CANCON),它具有兩個功能,讀CANCON意味著訪問CAN控制器的中斷寄存器,寫CANCON意味著訪問命令寄存器;(4)狀態寄存器(CANSTA),具有兩個功能,讀CANSTA是訪問CAN控制器的狀態寄存器,寫CANSTA是為后續的DMA傳輸設備內部數據存儲器RAM的地址。此外,DMA邏輯允許CAN控制器與CPU在片主RAM之間的高速數據交換。
電動車CAN總線結構示意圖
在芯片初始化階段,CPU通過向CANCON和CANSTA寫入內容,完成CAN控制器的功能初始化。在實際通訊過程中,CPU則利用四個寄存器使CAN控制器接收和發送數據信息。
電動車用輔助三相逆變電源從結構上可以分為三個部分:(1)DC/DC多路電源——自動適應直流輸入端的大范圍電壓浮動,為系統的其它電路提供彼此隔離且電壓穩定的低壓電源;(2)主控制板——檢測各路輸出的電壓、電流,根據運行情況智能調整逆變電路的輸出,通過CAN總線參與整車數據通訊;(3)主功率逆變電路——由高度集成的三相逆變模塊IPM組成,完成主電路的逆變功能。
電動車CAN總線結構示意圖
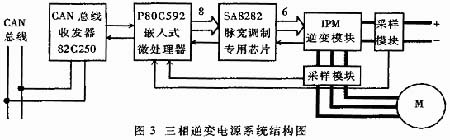
系統基本結構圖如圖3所示,其中未標出給系統各器件供電的DC/DC多路電源。
DC/DC多路電源采用開關電源的標準設計,配合具有不同變的多抽頭高頻變壓器,對外輸出5V、12V、20V等多路隔離直流電。同時考慮到電動車電池組電壓的波動范圍相對較大(充滿時為400V,使用過程中可能降低到280V),在設計中選擇了適當的電路結構,取得較好的輸入電壓適應能力。
控制板是整個系統的核心,采用P8xC592單片機系統中無片內ROM的P80C592、脈寬調制專用芯片SA8282、CAN總線收發器82C250以及主電路電壓、電流數據采集模塊等。
控制板通過SA8282專用芯片向三相逆變模塊IPM提供6路PWM信號。SA8282芯片由MITEL公司開發生產,其特點是控制簡單、頻率精度高、運行可靠性高,它支持標準8位MOTEL復用數據總線,可以方便地和單片機交換數據。單片機只需對芯片內部的5個數據寄存器賦值,就可以完成對PWM波形輸出的初始化和實時控制。SA8282芯片為標準28腳雙列直插式封裝,管腳RPHT、RPHB、YPHT、YPHB、BPHT、BPHB輸出三相可獨立控制的TTL驅動信號,可對應驅動三相逆變橋上的六路IGBT。
將SA8282專用芯片與IPM連接后,P80C592只需要在啟動時對其進行初始化,三相輸出達到預定值后,SA8282即可以獨立驅動IPM模塊。只有在調整PWM輸出時,P80C592才需要對SA8282進行控制。同時,SA8282芯片的SETTRIP管腳能夠響應IPM發出的故障信號,迅速關斷所有PWM波形輸出,對逆變電路進行快速保護,并通過TRIP狀態輸出管理通知P80C592單片機,確保系統安全。
分布于主電路直流輸入端和三相輸出端的數據采集模塊可對各路電壓、電流進行采集,經P80C592進行A/D變換后保存到數據存儲器中,便于CPU判斷系統輸入/輸出是否正常,并進行相應操作。
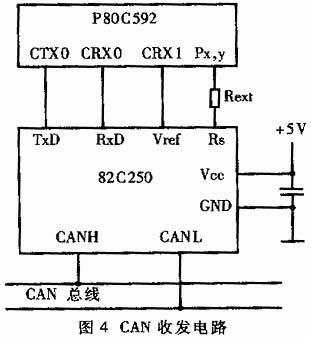
CAN總線收發器82C250是CAN控制器和物理總線間的接口,最初為汽車高速通信設計,具許多針對車輛應用設計的結構。其特點包括:有效減小汽車環境瞬間干擾對信號的影響,具有保護總線能力;防護電池與地之間發生短路;支持低電流待機方式等,因此十分適合電動車輔助逆變電源的需要。將82C250與P80C592的CAN接口輸入、輸出端相連,便構成了輔助逆變電源對外通訊的接口,如圖4所示。
電動車CAN總線結構示意圖
3逆變電源系統軟件設計
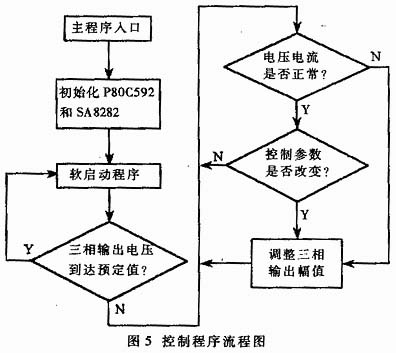
輔助三相逆變電源的控制軟件通過8051匯編語言編制,在完成其控制功能外,力求程序的合理與簡化,以適應電動汽車對系統穩定性和可靠性的要求,控制流程如圖5所示。
電動車CAN總線結構示意圖
系統上電運行后,單片機P80C952首先對SA8282芯片初始化寄存器進行數據初始化,然后根據負載電機的特點執行軟啟動程序。當三相輸出電壓達到預定值時,三相逆變電源即進入穩定運行狀態。此后控制程序將循環檢測各線路的電壓、電流情況,根據情況修改SA8282控制寄存器參數,調整PWM輸出,從而改變三相輸出。例如,電動車運行一段時間后,電池組電壓下降,導致逆變電源的三相輸出電壓低于設定值,P80C592檢測到該現象后,通過SA8282提高電壓輸出幅值,確保電源輸出的穩定。
同時,控制程序還將定期檢測數據存儲器中的控制參數。若整車控制系統通過CAN通訊修改了逆變電源的運行參數,P80C592將根據新的運行參數調整輸出。
控制程序中的三個中斷程序分別為:數據采集程序、CAN總線通訊程序和故障處理程序。
數據采集程序通過芯片內部計數器定時觸發,對逆變電源的輸入、輸出線路進行數據采集,經模/數轉換后存入數據存儲器,交給CPU進行運行狀況判斷。
CAN總線通訊程序包含若干子程序,其基本程序結構如圖6所示。當通訊程序觸發后,P80C592的CAN控制器提據命令字執行相關任務。當上位機請求數據時,將逆變電源的各項運行參數傳輸給整車系統;當上位機查詢節點狀態時,將當前CAN節點狀態等數據發磅出去;當上位機要求修改運行參數時,將接收的數據參數存入數據存儲器。
電動車CAN總線結構示意圖
故障處理程序具有最高的中斷優先權,即將P80C592的外部中斷0(INT0)管腳與SA8282芯片的TRIP管腳相連。當逆變電路發生故障時,IPM會發出故障信號給SA8282芯片,由后者在第一時間關斷PWM輸出,并向P80C592發出中斷信號,觸發故障處理程序。故障處理程序首先將SA8282關閉;然后通過CAN總線通知上位機有故障發生,并將故障代碼和當前系統運行參數寫入報文同時發送;最后控制單片機將整個系統關閉,實現安全關機。
CAN通信網絡的引入為電動車的全局優化控制提供了條件,車輛的每個子系統都因此成為整車控制中的智能節點。采用集成CAN控制器的P8xC592單片機作為控制核心,結合SA8282專用PWM波形發生芯片設計出的電動車用輔助三相逆變電源,不僅安全穩定性高,還能夠充分參與整車的數據交換和控制。對于采用不同CAN總線協議的電動車輛,只需適當修改控制程序中有關CAN通訊的部分程序段,就可以順利接入整車系統,使該逆變電源具有更強的通用性。
非常好我支持^.^
(5) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 日本乘用車市場同比增長 27%,但電動化轉型緩慢 2023-10-23
- [電子說] SOP8封裝 NV400F的語音芯片在電動車充電樁的應用 2023-10-21
- [電子說] 特斯拉與寧德時代:Q3財報的毛利率對比 2023-10-20
- [電子說] 特斯拉交付創紀錄,電動車市場競爭激烈,線路板是您的競爭優勢 2023-10-20
- [電子說] 基于MCU的防盜儀表方案說明 2023-10-19
- [電子說] 鴻海沖電動車 預告再并購 復制ICT發展模式爭取訂單 2023-10-19
- [制造/封裝] 今日看點丨ASML CEO:1980Di工具將受到美國芯片出口新規限制;鴻海沖電動車 預告 2023-10-19
- [汽車電子] Momenta的無圖智能駕駛方案 2023-10-19
( 發表人:admin )