衛星導航技術實現車距監測預警設計 - 全文
引言
本文基于RFID和衛星導航技術實現車輛之間的相互通信,通過向周圍車輛報告本車精確的地理信息,并獲取周圍車輛發送的地理信息,實時計算獲取車輛距離。此方案與雷達測距等其他實現方案相比,具有成本低、結構簡單、精準度高等優點。
1 RFID和衛星導航技術簡介
RFID技術最早出現在二戰時期,當時成功應用于飛機的敵我識別系統。現在已經發展成為21世紀最重要的技術之一。其基本原理是利用射頻信號的空間耦合(電感或電磁耦合)或反射的傳輸特性,實現對被識別物體的自動識別。
衛星導航技術最早應用于20世紀70年代由美國陸海空三軍聯合研制的全球衛星定位系統(GPS),現已全球性民用。由于衛星的位置精確可知,在GPS觀測中,我們可得到衛星到接收機的距離,應用三維坐標中的距離公式,利用3顆衛星,就可以組成3個方程式,解出觀測點的位置(X、Y、Z),實現對對象位置的確定。
2 系統整體設計方案
本系統設計包括單片機控制模塊、射頻通信模塊、衛星導航模塊、液晶顯示模塊、聲光報警模塊和穩壓電源模塊。系統采用LM1575芯片將車載12V電源轉換為5V電源,以凌陽SPCE061A型16位單片機為控制中心,使用nRF2401無線射頻收發模塊實現數據的發送和接收,使用OTrack-32北斗/GPS/GLONASS多模兼容導航芯片模塊實現經緯度坐標的獲取,同時使用12864型LCD顯示模塊實時顯示車距檢測信息,并使用蜂鳴器和LED實現聲光報警。系統框圖如圖1所示。
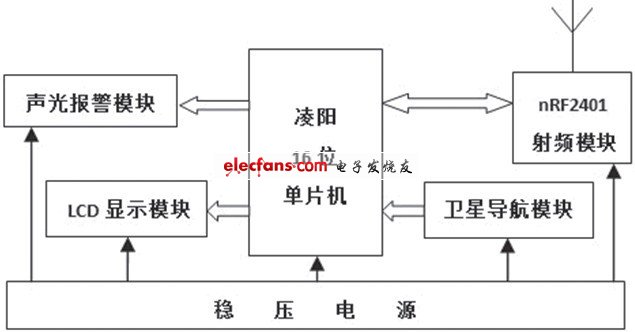
圖1 系統整體框架圖
系統工作時,首先通過衛星導航芯片獲取本車的精確經緯度信息,然后對信息進行編碼。編碼信息主要包括本車識別序列號、經緯度信息和車速[3]。完成信息編碼后,將編碼信息通過射頻收發模塊的通道1進行信息發送,接收地址應設置為統一的公用地址,本設計規定為5位十六進制地址:0xAAAAA。同時采用通道2接收周圍車輛發送的信息,將接收到的信息發送給單片機進行處理。
當同時接收多個射頻模塊發送的信息出現通信碰撞時,采用RFID防碰撞算法進行處理。單片機不斷接收來自射頻收發模塊的車輛識別序列號、經緯度信息和車速,并按照車輛序列號對這些信息進行數據結構隊列排序處理。
通過汽車測距測速算法和汽車行駛方向判定算法實時獲取周圍每輛車的行駛方向和車距。將周圍車輛車距車速與不同車速對應的安全車距進行對照,當汽車車距小于安全距離時,通過聲音和燈光向駕駛員進行報警。
?
3 系統硬件設計
3.1 微控制器
SPCE061A是***凌陽科技生產的16位結構的微控制器,其采用了μ’nSPTM系列的單片機內核,內嵌32k字的閃存,具有較高的處理速度,不僅可應用于傳統的控制領域,還可擴展應用于控制處理、數據處理以及數字信號處理等領域,具有廣泛的應用空間。本系統以凌陽單片機為控制中心,實現對射頻收發模塊、衛星導航模塊、LCD顯示模塊和聲光報警的控制。
3.2 射頻收發模塊
nRF2401芯片是一種工作于2.4GHz的單片無線射頻收發芯片,可同時實現一路數據發射和兩路數據接收功能。
它將射頻、8051MCU、9通道12位ADC、外圍元件、電感和濾波器全部集成在單芯片中,功耗非常低,輸出功率和通信頻道可通過程序進行配置,應用范圍非常廣泛。本設計采用的以nRF2401芯片為核心的nRF2401模塊共有兩組接口,分別采用接口1發送數據;接口2接收數據,從而實現信息的雙向傳輸。
3.3 衛星導航模塊
本系統所需衛星導航模塊采用北京東方聯星所產衛星導航芯片Otrack-32,可同時接收北斗二號、GPS、GLONASS衛星信號,實現多系統聯合導航定位、測速、定時。Otrack-32芯片實現了當今世界上最快速的1s熱啟動、國際最短的35s冷啟動、穩定的1s重捕獲;高達每秒20次的真值定位;定位精度5m;差分定位精度0.5m;高可靠、抗干擾;適應惡劣環境;通過了嚴格的地面測試和多種載體動態試驗。Otrack-32芯片為導航、測量、授時等專業導航領域提供了完全國產化的高性能核心器件。
3.4 12864液晶顯示模塊
本系統采用12864點陣型LCD顯示模塊,可顯示周圍車輛、最小車距、本車經緯度等相關信息。點陣型LCD顯示模塊不僅能夠顯示常用字符,還可顯示圖形和漢字。
12864LCD顯示模塊橫向顯示128點,縱向顯示64點,最多可同時顯示16×16中文字符4行8列,可以滿足大量的信息顯示需求。模塊引腳連接如圖2所示。
3.5 聲光報警電路
當車距較近時,通過單片機輸出信號,使聲光報警器工作。本系統采用一個LED和蜂鳴器實現聲光報警,使用2個單片機輸出端口分別實現對LED和蜂鳴器的控制。
電路原理如圖2所示。
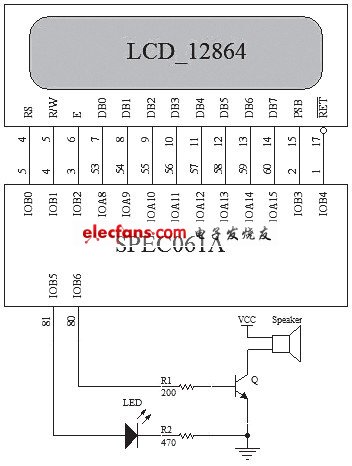
圖2 液晶顯示模塊和聲光報警電路原理圖
?
?
?
4 系統軟件設計
系統工作時,首先進行系統自檢和初始化設置,并通過LCD模塊顯示“歡迎使用”界面。然后通過衛星導航模塊接收經緯度信息并輸入到單片機,單片機通過控制射頻收發模塊,采用nRF2401模塊的通道1發送經緯度信息,同時采用通道2接收周圍的經緯度信息,并將接收到的周圍車輛的經緯度信息輸入到單片機進行處理。
由兩車的經緯度通過測距測速模型計算出兩車之間的距離,并將兩車車距與安全距離進行比較,如果車距小于安全距離,判斷車輛的相對行駛方向及前后方位,若為同向且小于安全距離,則單片機控制LED燈閃爍,距離越小LED燈的閃爍頻率越快,同時控制蜂鳴器發出聲音報警。
系統軟件流程如圖4所示。

圖4 系統軟件流程圖????
5 算法模型
5.1 汽車測距測速模型
射頻收發模塊接收到的信息主要是經緯度信息,系統通過對這些信息和本車的實時經緯度信息進行動態處理,可獲得每一時刻的最新車距信息。首先對經緯度信息進行格式定義。定義緯度信息北緯為“正(+)”,南緯為“負(-)”;經度信息東經為“正(+)”,西經為“負(-)”。地球的周長大約40008km。則平均緯度1度大約等于111km。本系統采集到的經緯度信息精度為0.0001,則每萬分之一單位代表距離近似等于11.1m,可滿足系統精度需求。于是,可得一般測距模型:

其中,E1和E2分別表示本車和其他車輛的經度信息,W1和W2分別表示本車和其他車輛的緯度信息,a表示經緯度1°代表長度,約1.11×105m。對于特殊情況,例如在東經180°與西經180°分界區域,需在運算前進行經度換算處理。本車車速的計算,可應用上述測距模型對本車測得的兩次經緯度計算得出衛星導航芯片經緯度掃描周期T內車輛移動距離,從而得出車速v。
5.2 汽車行駛方向判定模型
在實際情況中,周圍汽車行駛方向與本車主要有同向和相向兩種情況。此兩種情況的經緯度變化方向完全相反。則設某車多個時刻的經緯度信息矩陣分別為[A1,B1],[A2,B2]…[An,Bn],通過判斷[An,Bn]的正負,及與[An-1,Bn-1]的值進行比較,可判斷其大致的行駛方向。用矩陣 表示汽車行駛方向,其中E、W、S、N分別表示東、西、南、北方向。設汽車駛向的方向為1,若其他汽車與本車行駛方向相同,將代指兩車行駛方向的矩陣相減,即可得到零矩陣。通過對零矩陣進行判別,可粗略獲知周圍汽車與本車的相對行駛方向,還可得知周圍汽車在本車前后的方位。
表示汽車行駛方向,其中E、W、S、N分別表示東、西、南、北方向。設汽車駛向的方向為1,若其他汽車與本車行駛方向相同,將代指兩車行駛方向的矩陣相減,即可得到零矩陣。通過對零矩陣進行判別,可粗略獲知周圍汽車與本車的相對行駛方向,還可得知周圍汽車在本車前后的方位。
??
?
6 系統測試
系統測試和驗收測試重點在于檢驗設計的合理性和驗證系統的功能和可靠性。對于本設計的測試,主要從電路原理測試、系統硬件模塊測試、軟件系統測試和軟硬件聯合調試四個方面進行。
(1)穩壓電源模塊測試。將電源輸出端接到示波器上,觀測電壓波動范圍在系統要求范圍內,可滿足系統應用要求。
(2)對12864LCD顯示模塊進行測試,實現了字符、漢字及特定圖像的顯示,模塊測試無誤。
(3)衛星導航模塊測試。將程序寫入單片機,連接衛星導航模塊,將接收到的數據在LCD顯示器上顯示,顯示結果穩定。
(4)射頻收發模塊測試。連接單片機,用兩組模塊進行收發測試,全部正確收發信息。
(5)聲光報警模塊檢測。該模塊的電氣連接良好。將檢測聲光報警的程序寫入單片機中,該模塊可正常發出聲光信號。
7 結語
本系統利用衛星導航和RFID技術實現車距測量,通過調試,系統運行正常,達到了預期目標。
??
?
?
- 第 1 頁:衛星導航技術實現車距監測預警設計
- 第 2 頁:?射頻收發模塊
- 第 3 頁:算法模型
本文導航
非常好我支持^.^
(2) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 華大北斗榮獲2022年廣東省制造業單項冠軍 2023-10-16
- [電子說] 芯啟源科技自主研發GPS功分器產品概述 2023-10-13
- [電子說] 喜報!中海達獲2023年衛星導航定位創新應用最高獎 2023-09-27
- [電子說] 中海達獲2023年衛星導航定位創新應用最高獎 2023-09-26
- [電子說] 華信天線成功入選中國衛星導航與位置服務第十二屆年會論文征文 2023-09-08
- [電子說] 華為突破衛星通話,衛星通信時代揚帆起航 2023-09-07
- [電子說] 衛星定位北斗芯片AT6558一款高性能BDS/GNSS多模衛星導航接收機SOC單芯片 2023-08-30
- [電子說] 雙頻RTK定位技術原理及解決方案 2023-08-25
( 發表人:小蘭 )