仿人機器人步態補償算法介紹與分析
仿人機器人 THBIP-I及其步態 (HumanoldrobotTHBIP,Iandits@alkinggait)’ 清華大學 自主研制的仿人機器人 呻 IP--重約 130kg,高 172cm,有 32個主要自由度,包括6x2=12 個自由度的雙腿、6×2=12個自由度的雙臂 4×2= 8個自由度的雙手等,此外頭部有 2個主自由度和 5 個手動調節雙眼自由度.它裝備有直流電源和一系列肢體姿態檢測裝置(包括六維力/力矩傳感器、三軸陀螺儀及三軸加速度計),腿部各關節設計運動范圍大,可實現較復雜的動作,如下蹲、轉彎、跨障和上下臺階等運動,上肢可實現點頭 搖頭、抓握水杯等運動 .根據清華大學仿人機器人樣機THBIP—I的實際結構,把機器人分為 15個大小不同的質量塊,每個質量塊上均有與之固結的剛體坐標系來表示它的方位和朝向,除支撐足質量塊與地面保持靜止,其他 l4個質量塊的結體坐標系的原點都在仿人機器人的運動關節上,如圖1所示,Z軸是該自由度的轉動軸,x軸指向下一個自由度,坐標系滿足右手規則;前后依次的兩個坐標系的原點相對位置不變,僅發生圍繞各自z軸的相對旋轉.
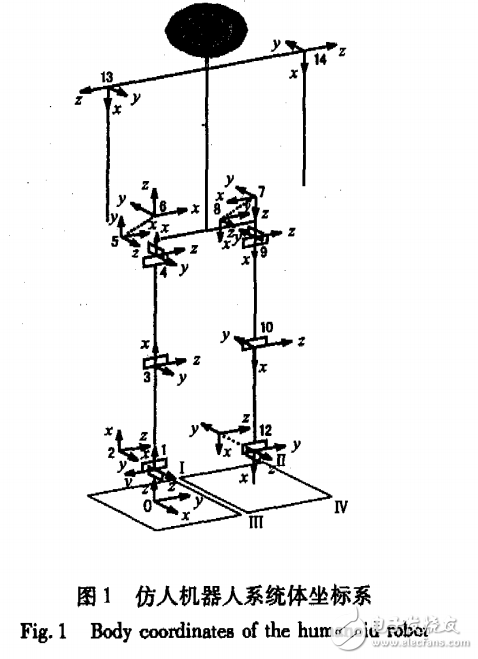
圖 1 仿人機器人系統體坐標系 Fig.
1 Bodycoordinatesofthehumanoidrobot
所有轉角的初始狀態都如圖 1中所示,滿足右手轉動的轉角 0為正,反之為負; 和 i的正負定義與 0的正負定義保持一致.用多剛體系統動力學即可建立起其力學模型和ZMP位置表達式.根據仿人機器人 THBIP-I樣機的系統描述,基于 ZMP‘穩定移動的原則,多組平地行走的步態被規劃出來.現列舉步態名稱為 G3GA的一組步態,其步態參數為步長300ram、步態周期 8s(一個單腿支撐期和一 個雙腿支撐期共耗時 8s).G3GA步態的各關節轉角數據如圖2中左側部分黑色虛線所示. 3 理論步態的行走效果 (Walking~ectsof thetheoreticgaits) 將步態 G3GA用于實際的行走實驗:仿人機器人行走不太穩定也不太柔順 ,需要人在旁扶持,但扶持力不是很大,只是沒有完全失穩,仿人機器人擺動足落地有比較明顯的沖擊現象;在單腳支撐期剛剛開始的一段時間內,擺動足沒有離地,機器人出現旋轉現象,左腳支撐向左拐,右腳支撐向右拐.圖2左側為仿人機器人步態 G3GA及其實際跟蹤曲線,其中黑色虛線為 G3GA,即理論曲線;黑色實線為 G3GAA1,即為機器人在懸掛狀態下的關節跟蹤曲線 ;灰色虛線為 G3GAG1,為機器人第一次落地行走實驗下的關節跟蹤曲線;灰色實線為 G3GAG2,為機器人第二次落地行走實驗下的關節跟蹤曲線.其中 G3GAG1和 G3GAG2幾乎重疊 ,說明問題是重 復出現的,系統的復現性是比較好的.圖2右側上方為仿人機器人足底六維力傳感器的力測量數據,其中左足垂直方向的受力曲線為經過 F1、硯 、乃 的黑色實線 ,右足垂直方向的受力曲線為經過 E1、 、躬 的灰色虛線.圖2右側下方為仿人機器人足底六維力傳感器的力矩測量數據.而機器人在步行過程中有外力的扶持 ,ZMP測量不準確 ,這里沒有列舉其 ZMP測量曲線.從圖2中可以分析出仿人機器人在該理論步態下的行走特點. (1)仿人機器人在行走中,擺動足不能及時地抬離地面.在圖2的曲線中表現為,踝關節側擺的跟蹤相應明顯低于其他關節,在跟蹤曲線上的圖中J4 處和 B處形成非常明顯的滯后;在擺動腿提離地面的過程中,在支撐踝側擺關節上的負載突然顯著增加,而踝側擺的抗負載干擾的能力比較弱,在跟蹤曲線的 J4處和 B處再次顯著地 向下 ,并形成更加滯后的下凹曲線;同時,在仿人機器人的支撐髖上反映為跟蹤曲線形成如 C處和 D處的超調(同時也與擺動髖和擺動踝側擺的跟蹤曲線 的誤差相互影響 ).在 足
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
仿人機器人步態補償算法介紹與分析下載
相關電子資料下載
- 世界上首個仿人機器人飛行員PIBOT問世 365
- NVIDIA Isaac Sim機器人仿真平臺上云 546
- 基于仿人機器人的多功能通用型控制系統的設計 1648
- 基于仿人機器人BHR-1的視覺跟蹤和運動控制系統的設計 2163
- 面向兩臂兩手仿人機器人的自定義阻抗控制方法 1227
- 伊朗推出仿人機器人 能抓住水瓶還會寫字 563
- 機器人行業發展迅速,仿人機器人大受歡迎 354
- 仿人機器人的發展在未來會成為一種潮流嗎 802
- 仿人機器人熱銷 未來會成為一種時代潮流嗎 2979
- 日本推出仿人機器人 緩解人們壓力 3129