解析機(jī)器學(xué)習(xí)的局限與明天
推薦 + 挑錯(cuò) + 收藏(0) + 用戶評(píng)論(0)
在論壇開(kāi)場(chǎng)之初,戴文淵引出主題:機(jī)器學(xué)習(xí)的明天是一個(gè)很難的問(wèn)題,公眾關(guān)心更多的可能是機(jī)器學(xué)習(xí)或深度學(xué)習(xí),以及隨阿法狗出現(xiàn)火起來(lái)的強(qiáng)化深度學(xué)習(xí)。機(jī)器學(xué)習(xí)的明天很可能是今天大家看來(lái)是一個(gè)冷板凳的領(lǐng)域,正如20年前的深度學(xué)習(xí)。因此今天要談的明天的機(jī)器學(xué)習(xí),戴文淵認(rèn)為一定不是深度學(xué)習(xí)。因此,本次論壇要探討的很可能是一個(gè)在大家看來(lái)會(huì)覺(jué)得離應(yīng)用很遠(yuǎn)、很不現(xiàn)實(shí)的事物,但是很可能會(huì)成為十年后重要機(jī)器學(xué)習(xí)方向之一。
? ? ? ?今日頭條科學(xué)家李磊帶來(lái)的演講是《會(huì)思考的通用智能機(jī)器還有多遠(yuǎn)?》。在演講中,李磊主要對(duì)人工智能是什么?人工智能發(fā)展到什么程度以及面臨的挑戰(zhàn)三個(gè)方面進(jìn)行了闡述,李磊首先闡述了對(duì)人工智能的兩種定義:類人智能和理性智能。類人智能的目標(biāo)是讓機(jī)器像人那樣思考、決策、解決問(wèn)題,具備學(xué)習(xí)能力和行動(dòng)能力。理性智能是研究如何通過(guò)計(jì)算方法達(dá)到合理的感知、決策、解決問(wèn)題、學(xué)習(xí)和行為能力。不是和人去比較,而是把計(jì)算看成自然現(xiàn)象。
人工智能要研究的內(nèi)容十分廣泛,包括知識(shí)表示、形式化推理、規(guī)劃與決策、機(jī)器學(xué)習(xí)、理解文字、自然語(yǔ)言(人類語(yǔ)言)、語(yǔ)音識(shí)別與合成、理解圖像、視覺(jué)感知以及機(jī)器人控制。目前人工智能在某些具體任務(wù)上達(dá)到或超過(guò)人類能力,但通用型智能還有漫漫長(zhǎng)路。
李磊介紹到頭條最近發(fā)布了一款?yuàn)W運(yùn)機(jī)器人,可以在奧運(yùn)期間自動(dòng)發(fā)布了450條新聞。他談到經(jīng)過(guò)過(guò)去多次的實(shí)踐證明:深度學(xué)習(xí)加大數(shù)據(jù)可以較好地解決監(jiān)督學(xué)習(xí)的問(wèn)題。
深度學(xué)習(xí)從人腦解決問(wèn)題的的思路出發(fā),創(chuàng)造了人工神經(jīng)網(wǎng)絡(luò)和人工神經(jīng)單元的概念,隨著層數(shù)的加深,神經(jīng)網(wǎng)絡(luò)能夠完成一些合理對(duì)話之類的任務(wù)。但是仍需注意人工智能和機(jī)器學(xué)習(xí)不僅僅是監(jiān)督學(xué)習(xí)和深度學(xué)習(xí),要解決的問(wèn)題其實(shí)更多,目前的深度學(xué)習(xí)還有很大的局限性,例如依賴大量標(biāo)注數(shù)據(jù),并且這些數(shù)據(jù)的獲取代價(jià)非常高;此外,目前的深度學(xué)習(xí)的通用性還不夠強(qiáng)。
最后,李磊總結(jié)了明天機(jī)器學(xué)習(xí)需要突破的三個(gè)方面:
需要有可解釋性的機(jī)器學(xué)習(xí),當(dāng)機(jī)器學(xué)習(xí)模型成功和失敗的時(shí)候,需要知道它成功或者失敗的原因;機(jī)器學(xué)習(xí)能夠做更多的推理,而不僅僅是簡(jiǎn)單的判斷;過(guò)去做深度學(xué)習(xí)時(shí)需要很多的計(jì)算集群,需要耗費(fèi)大量的能力,未來(lái)的是否可以實(shí)現(xiàn)在不影響性能的情況下實(shí)現(xiàn)單位能耗呢?
林宙辰:機(jī)器學(xué)習(xí)一階優(yōu)化算
? ? ? ?北京大學(xué)信息科學(xué)技術(shù)學(xué)院機(jī)器感知與智能教育部重點(diǎn)實(shí)驗(yàn)室教授林宙辰帶來(lái)的分享是 《機(jī)器學(xué)習(xí)一階優(yōu)化算法》。他主要分享了機(jī)器學(xué)習(xí)在過(guò)去、現(xiàn)在、未來(lái)的優(yōu)化方面的問(wèn)題。從上個(gè)世紀(jì)90年代,優(yōu)化技術(shù)就已經(jīng)發(fā)展的比較完備了。在此之前,可以劃分為兩個(gè)階段,第一階段到上世界60年代,此前的優(yōu)化方法較為緩慢;在60年代到90年代,隨著計(jì)算機(jī)的發(fā)明,有著很大進(jìn)展。
按照當(dāng)時(shí)所用信息類別可以劃分為三類:
第一類是只用目標(biāo)函數(shù)的方法;第二類是一階的方法,也就是目標(biāo)函數(shù)和梯度方法;第三類是二階方法,如Newton’s Methods、Sequential Quadratic Programming、Interior Point Methods。
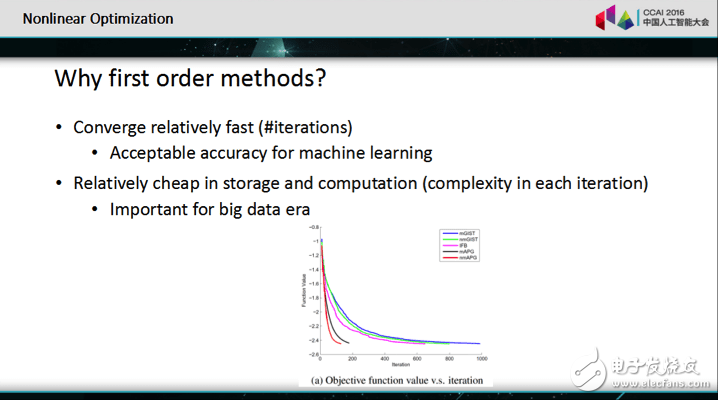
接著,林宙辰談到了選擇一階方法的兩個(gè)原因,并認(rèn)為一階的方法是機(jī)器學(xué)習(xí)里面一個(gè)主流的學(xué)習(xí)方法。
因?yàn)橐浑A方法對(duì)數(shù)字精度的要求不太高;一階方法的存儲(chǔ)和和計(jì)算的成本較低。
從90年代到現(xiàn)在,主要是對(duì)一些現(xiàn)有的方法進(jìn)行復(fù)興和更好的改進(jìn)。接著,他總結(jié)了一階方法從過(guò)去到現(xiàn)在的研究進(jìn)展,主要包括六個(gè)方面:
Smooth -》 Nonsmooth:光滑可以對(duì)每一個(gè)點(diǎn)選一個(gè)梯度,選非光滑就不能選梯度,那么次梯度就比較慢,現(xiàn)在就是使用Proximal; Convex -》 Nonconvex:首先一般只能證明非真的,如果好一點(diǎn)就每個(gè)據(jù)點(diǎn)都會(huì)收到臨界點(diǎn)上面,2012年開(kāi)始有一個(gè)非常好的理論突破,就是把這個(gè)幾何理論引入到優(yōu)化里面,常用的函數(shù)基本都屬于這種函數(shù)類型;Deterministic -》 Stochastic:在大數(shù)據(jù)情況下,很難能夠有計(jì)算量支持確定性,所以只能隨機(jī)抽取一些樣本來(lái)算,2013年張老師提出來(lái)方差下降,可以進(jìn)行加速; One/Two Blocks -》 Multiple Blocks:如果是一個(gè)或者兩個(gè)Block可以作為一個(gè)交界;Synchronous -》 Asynchronous:同步會(huì)導(dǎo)致很多機(jī)器要等著其他的機(jī)器算完之后才能進(jìn)行分析,所以需要異步; Convergence & Convergence Rate:Convergence Rate分析方面有更好的技術(shù),尤其是加速差值技巧。
演講結(jié)尾,林宙辰表示,未來(lái)的機(jī)器研究方面會(huì)集中在兩個(gè)方向:
計(jì)算的規(guī)模會(huì)進(jìn)一步增加,需要采用完全隨機(jī)的方式進(jìn)行,否則大數(shù)據(jù)之下是無(wú)法完成這些計(jì)算的;利用量子計(jì)算的方法來(lái)參與規(guī)劃,可以在兩個(gè)層面進(jìn)行:
將傳統(tǒng)的算法每個(gè)步驟進(jìn)行量子化;在整體上設(shè)計(jì)量子的算法。
非常好我支持^.^
(0) 0%
不好我反對(duì)
(0) 0%
下載地址
解析機(jī)器學(xué)習(xí)的局限與明天下載
相關(guān)電子資料下載
- 如何創(chuàng)建FPGA控制的機(jī)器人手臂 49
- 機(jī)器學(xué)習(xí)需要掌握的九種工具盤點(diǎn) 16
- Hugging Face被限制訪問(wèn) 404
- 《人工智能在指揮和控制系統(tǒng)中的決策支持》 133
- 生成式人工智能和機(jī)器學(xué)習(xí)正在這9個(gè)學(xué)科中打造未來(lái) 216
- 智慧礦山AI算法帶你解決皮帶運(yùn)行難題! 51
- 人工智能領(lǐng)域存在第一性原理嗎? 53
- 英特爾啟動(dòng)首個(gè)AI PC加速計(jì)劃,目標(biāo)2025年前為超100萬(wàn)臺(tái)PC提供AI特性 223
- PLC就是邏輯控制嗎?PLC的網(wǎng)絡(luò)通信怎么樣? 51
- 機(jī)器學(xué)習(xí)常用的5種采樣方法盤點(diǎn) 45