一種改進擴展卡爾曼的四旋翼姿態估計算法
大小:1.07 MB 人氣: 2017-12-04 需要積分:2
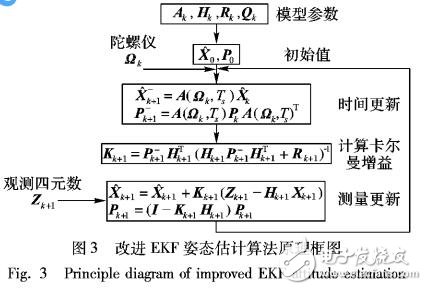
為了提高標準擴展卡爾曼姿態估計算法的精確度和快速性,將運動加速度抑制的動態步長梯度下降算法融入擴展卡爾曼中,提出一種改進擴展卡爾曼的四旋翼姿態估計算法。該算法在卡爾曼測量更新中采用梯度下降法進行非線性觀測,消除標準擴展卡爾曼算法在線性化時帶來的線性化誤差,提高算法的準確性和快速性;對梯度下降法的梯度步長進行動態處理,使算法步長與四旋翼飛行器的運動合角速度成正比,增強微型四旋翼飛行器姿態解算的動態性能;對強機動運動過程中機體產生的運動加速度進行抑制處理,消除運動加速度對姿態解算的不利影響,提高了微型四旋翼飛行器姿態解算的跟蹤精度。為了驗證所設計算法的可行性和有效性,基于STM32單片機搭建四旋翼實驗平臺系統進行實時在線性能驗證。結果表明,所設計算法能提高四旋翼飛行器在強機動、高速運動情況下的姿態跟蹤精度、動態性能,增強姿態融合算法的抗干擾性,保證微型四旋翼飛行器的穩定飛行。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
一種改進擴展卡爾曼的四旋翼姿態估計算法下載
相關電子資料下載
- 卡爾曼濾波是什么 卡爾曼濾波與目標追蹤技術分析 303
- 多目標跟蹤算法總結歸納 514
- 深入探討電池管理系統開發常見問題 511
- 深度解析:多傳感器融合SLAM技術全景剖析 1205
- 基于PX4實現的四旋翼建模與控制 328
- 基于波形域的匹配濾波前抗間歇采樣轉發干擾方法 776
- 四旋翼無人機飛行原理【其利天下無人機方案開發】 1631
- 卡爾曼濾波算法c語言實現方法 1098
- 卡爾曼濾波家族 602
- 卡爾曼濾波算法的基本原理 1292