GPS信號跟蹤算法
大小:0.69 MB 人氣: 2018-01-13 需要積分:2
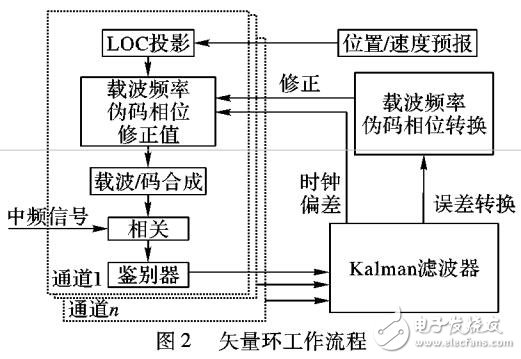
針對傳統全球定位系統( GPS)接收機在高動態環境下跟蹤性能不理想,提出一種基于載波頻率輔助相位的GPS信號跟蹤算法。利用鎖頻環(FLL)輔助鎖相環(PLL)的方式代替傳統單一跟蹤環路,通過卡爾曼(Kalman)濾波器對接收機各跟蹤通道中頻信號進行綜合處理。根據多條跟蹤通道的偽距和偽距率殘差對系統狀態參量進行綜合估計,并搭建Kalman濾波器的狀態方程和量測方程,給出了跟蹤環路反饋量,與傳統標量跟蹤模式下的跟蹤性能進行了對比。仿真結果表明,基于載波頻率輔助相位的CPS信號跟蹤算法進入穩態時間減小了100 ms,位置誤差精度提高了5m,速度誤差精度提高了近3m/s,在接收機用戶快速運動的環境下,能夠很好地處理高動態信號。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
GPS信號跟蹤算法下載
相關電子資料下載
- 5分鐘讀懂GPS-RTK實時動態技術,建議收藏! 118
- 抗干擾強、低功耗、高精度多模衛星定位技術——為您帶來全新的精準體驗 178
- 智慧醫療——衛星同步時鐘在某婦幼保健院的對時方案 86
- 車載車庫GPS信號屏蔽器:如何確保您的車輛安全 83
- 中科微ATGM332D-5T:BDS、GNSS全星座定位授時模塊 129
- 中科微ATGM336H定位模塊的數據手冊解讀 201
- 兆越打造 | GPS/北斗高精度時間同步網絡方案 314
- 車載車庫GPS信號探測器:讓你“無處不導” 100
- 同步時鐘:北斗/GPS衛星、電信基站、NTP以太網校時方式的區別 144
- 安徽京準 GPS北斗衛星時鐘同步裝置:守護全球精確時鐘 137