 電子發(fā)燒友App
電子發(fā)燒友App


對于一個簡單的計算機(jī)系統(tǒng)模型,我們可以將存儲器系統(tǒng)看做是一個線性的字節(jié)數(shù)組,而 CPU 能夠在一個常數(shù)時間內(nèi)訪問每個存儲器的位置。實際上,存儲器系統(tǒng)(memory system)是一個具有不同容量、成本和訪問時間的存儲設(shè)備的層次結(jié)構(gòu)。CPU 寄存器保存著最常用的數(shù)據(jù)。
靠近 CPU 的小、快速的高速緩存存儲器(cache memory)做為一部分存儲在相對慢速的主存儲器(main memory)中數(shù)據(jù)和指令的緩沖區(qū)域。主存緩存存儲在容量較大的、慢速磁盤上的數(shù)據(jù),而磁盤常常作為存儲在通過網(wǎng)絡(luò)連接的其他機(jī)器的磁盤的緩存。
Cache 基本模型
問題
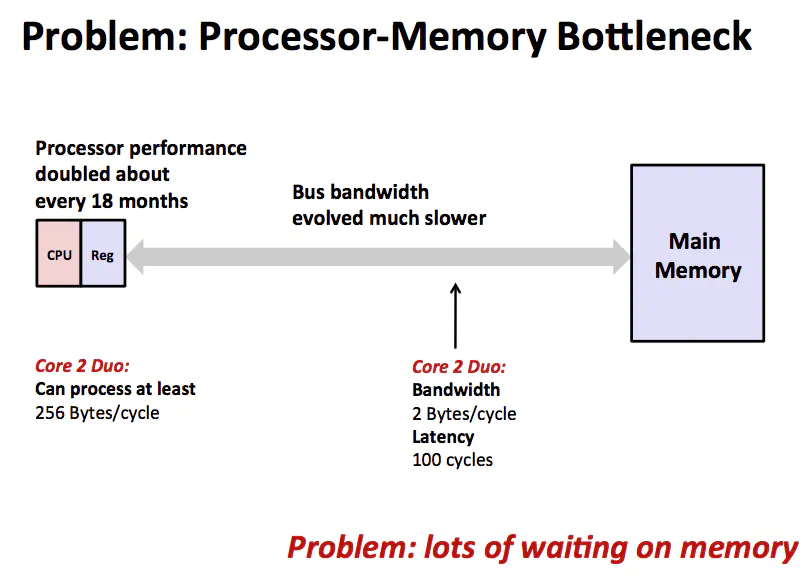
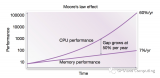
CPU 通過總線從主存取指令和數(shù)據(jù),完成計算之后再將結(jié)果寫回內(nèi)存。這個模型的瓶頸在于 CPU 的超級快的運算速度和主存相對慢的多的運算速度無法匹配,導(dǎo)致大量的時間都浪費在內(nèi)存上。既然內(nèi)存比較慢那么就盡量減少 CPU 對內(nèi)存的訪問,于是在 CPU 和 主存之間增加一層 Cache,如下圖所示。
cache
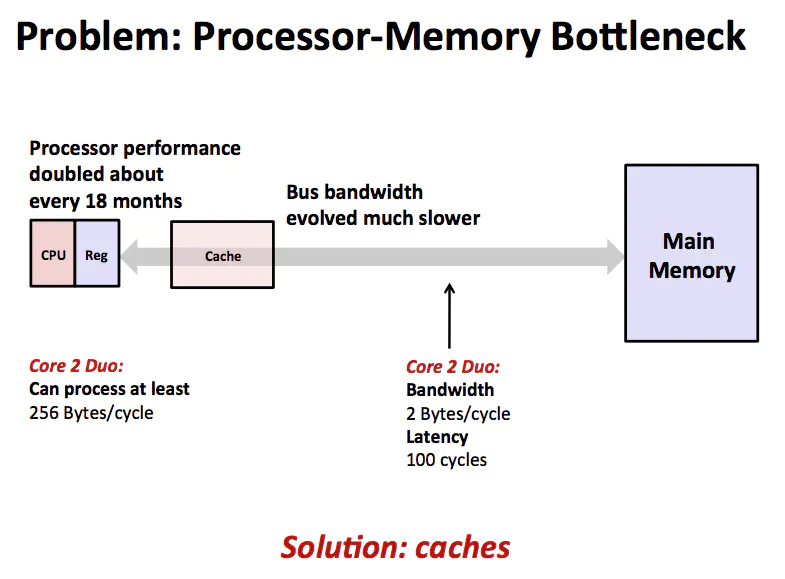
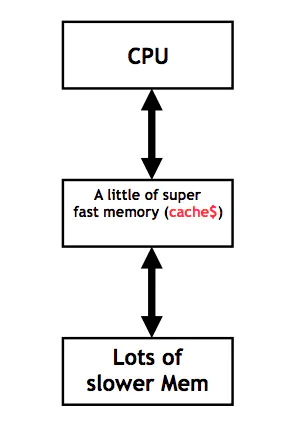
在計算機(jī)中,Cache 就是訪問速度快的計算機(jī)內(nèi)存被用來保存頻繁訪問或者最近訪問的指令和內(nèi)存。通常 Cache 的造價比較高,所以相對 Memory 來說,容量比較小,保存的數(shù)據(jù)也有限。總而言之,由于 CPU 和內(nèi)存之間的指令和數(shù)據(jù)訪問存在瓶頸,所以增加了一層 Cache,用來盡力消除 CPU 和內(nèi)存之間的瓶頸。這個模型如下圖所示。
Cache 模型
局部性原理
你可能會問為什么在CPU 和內(nèi)存之間增加一層 Cache,就可以盡力消除 CPU 和內(nèi)存之間的瓶頸呢?
why cache work
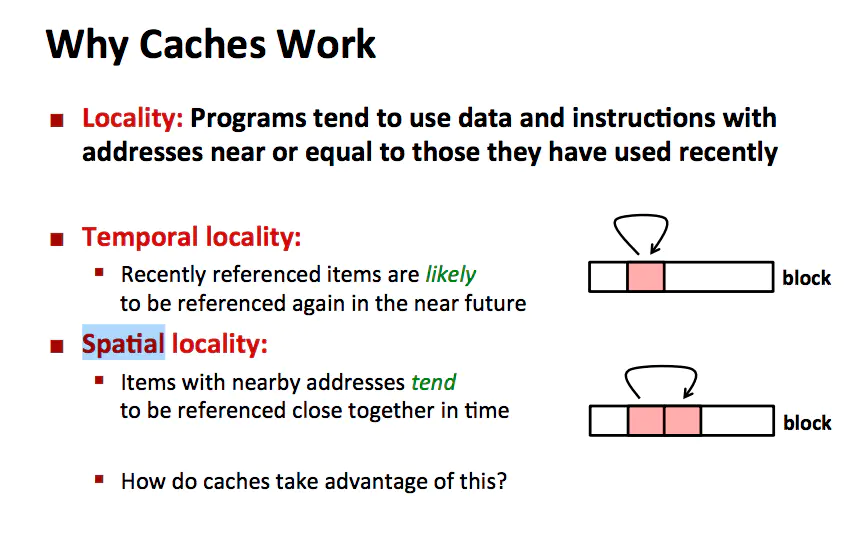
如上圖所示,是局部性原理(principle of locality)讓 Cache 更好的工作。一個編寫良好的計算機(jī)程序通常都具有良好的局部性(locality),程序傾向于引用鄰近于其他最近引用過的數(shù)據(jù)項的數(shù)據(jù)項,或者最近引用過的數(shù)據(jù)項本身,這種傾向性被稱作局部性原理。
局部性通常有 2 種不同的形式:時間局部性(temporal locality)和空間局部性 (spatial locality)。在一個具有良好時間局部性的程序中,被引用過一次的內(nèi)存地址很可能在不遠(yuǎn)的將來會再被多次引用。在一個具有良好空間局部性的程序中,如果一個內(nèi)存位置被引用了一次,那么程序很可能在不遠(yuǎn)的將來會引用附近的一個內(nèi)存位置。
程序是如何利用這個局部性原理呢?
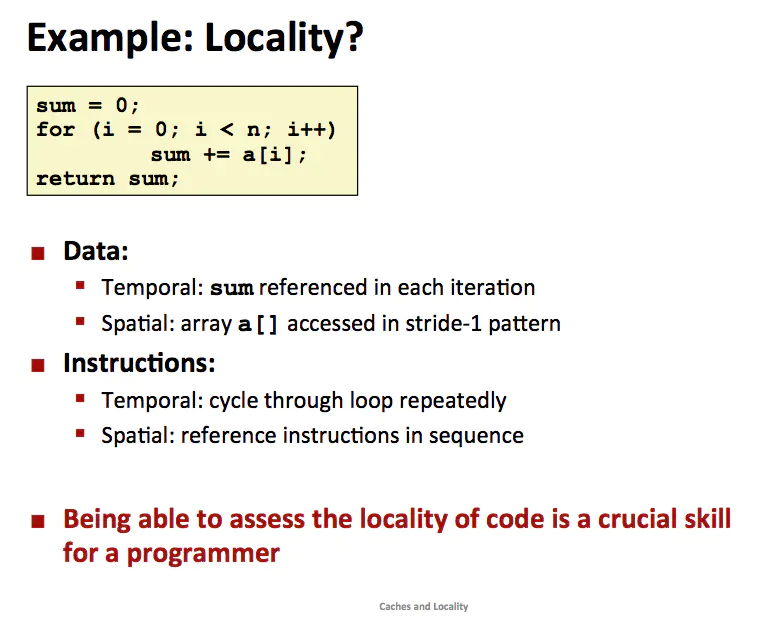
Cache&locality
從數(shù)據(jù)方面來說,
sum 變量在每次循環(huán)迭代的時候都會被訪問,符合時間局部性。
采用步長為 1 的方式訪問數(shù)組 a ,符合空間局部性。
從指令方面來說,
循環(huán)迭代,符合時間局部性
線性執(zhí)行指令,符合空間局部性
對于程序員來說,編寫具有良好的局部性的程序是讓程序運行更快的方法之一。
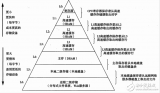
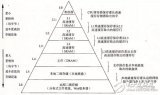
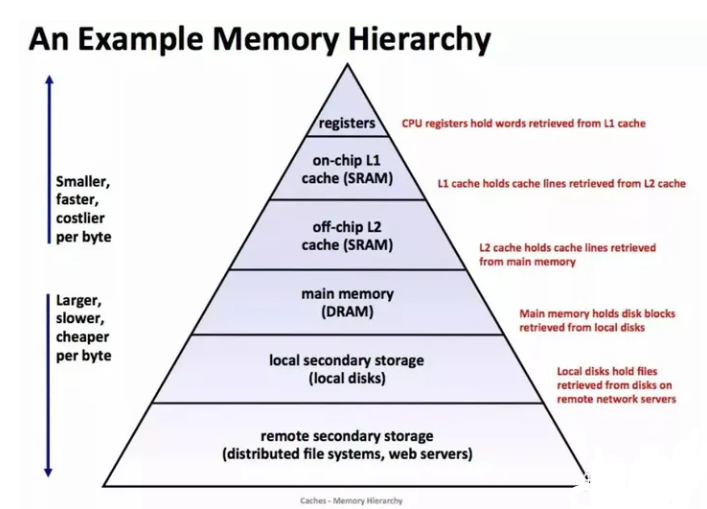
存儲器的層次結(jié)構(gòu)
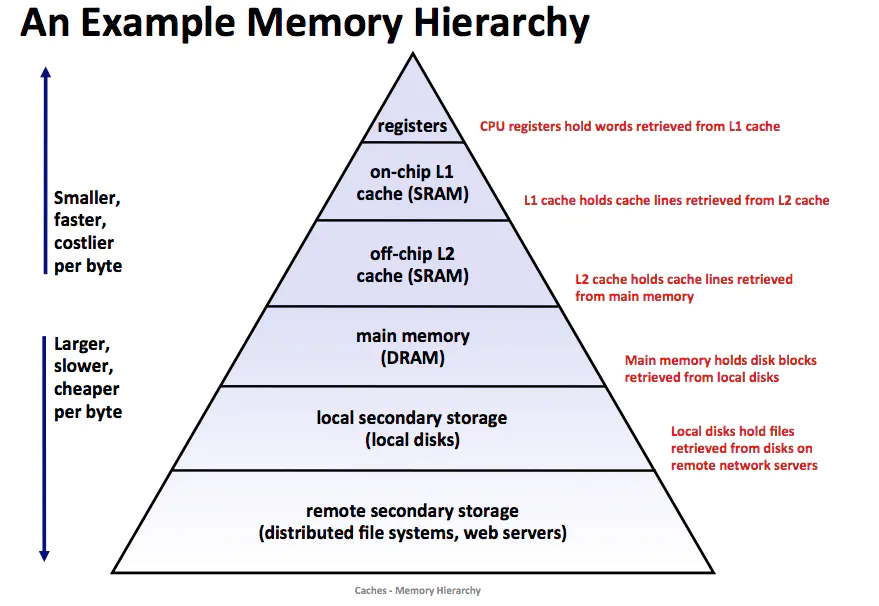
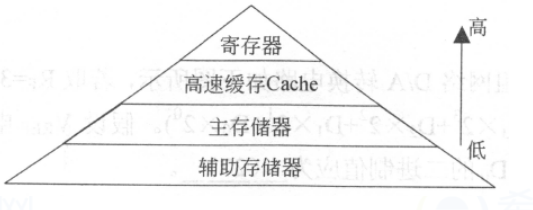
存儲器層次結(jié)構(gòu)
上圖展示了一個典型的存儲器層次結(jié)構(gòu)。一般而言,從高層往底層走,存儲設(shè)備變得更慢、更便宜和更大。在最高層是少量快速的CPU 寄存器,CPU 可以再一個時鐘周期內(nèi)訪問它們。接下來是一個或者多個小型到中型的基于 SRAM 的高速緩存存儲器,可以再幾個 CPU 時鐘周期內(nèi)訪問它們。
然后是一個大的基于 DRAM 的主存,可以在幾十或者幾百個時鐘周期內(nèi)訪問它們。接下來是慢速但是容量很大的本地磁盤。最后有些系統(tǒng)甚至包括了一層附加的遠(yuǎn)程服務(wù)器上的磁盤,要通過網(wǎng)絡(luò)來訪問它們,例如網(wǎng)絡(luò)文件系統(tǒng)(Network File System,NFS)這樣的分布式文件系統(tǒng),允許程序訪問存儲在遠(yuǎn)程的網(wǎng)絡(luò)服務(wù)器上的文件。
存儲器層次結(jié)構(gòu)的核心是,對于每個 k , 位于 k 層的更快更小的存儲設(shè)備作為位于 k+1 層的更大更慢的存儲設(shè)備的緩存。也就是說,層次結(jié)構(gòu)中的每一層都緩存來自較低一層的數(shù)據(jù)對象。例如,本地磁盤作為通過網(wǎng)絡(luò)從遠(yuǎn)程磁盤取出文件的緩存,以此類推知道 CPU 寄存器。
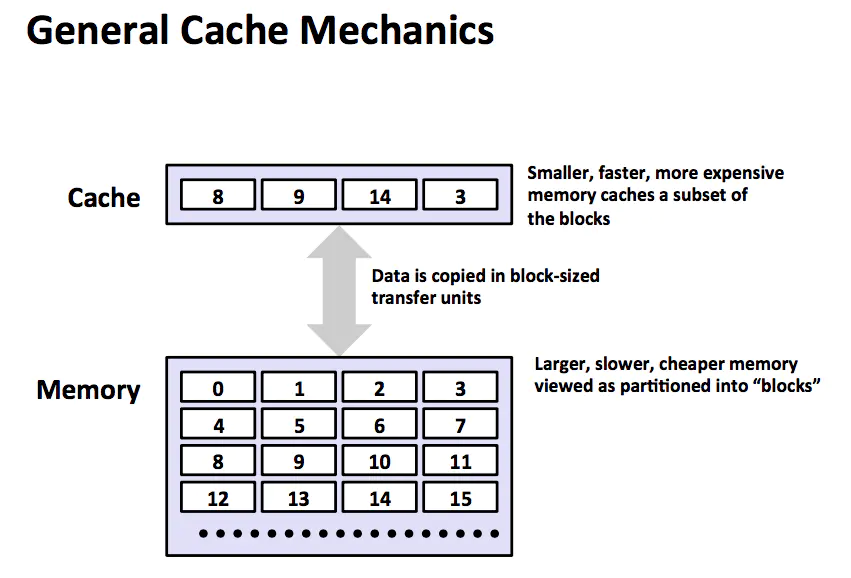
cache
上圖展示了存儲器層次結(jié)構(gòu)中緩存的一般性概念。第 k+1 層的存儲器被劃分成連續(xù)的數(shù)據(jù)對象組塊(chunk),稱為塊(block)。每個塊都有一個唯一的名字或者地址以區(qū)別其他的塊。例如第 k+1 層存儲器被劃分成 16 個大小固定的塊,編號為 0 ~ 15。第 k 層的存儲器被劃分成較少的塊的集合,每個塊的大小與 k+1 層的塊的大小一樣。
在任何時刻,第 k 層的緩存包含了第 k+1 層塊的一個子集的副本。例如,第 k 層的緩存有 4 個塊的控件,當(dāng)前包含了 8,9,14,3 的副本。
數(shù)據(jù)總是以塊大小為傳輸單元在第 k 層 和 第 k+1 層之間來回復(fù)制的,雖然在層次結(jié)構(gòu)總?cè)魏我粚ο噜彽膶哟沃g塊大小是固定的,但是其他的層次對之間可以有不同的塊大小。
例如 L1 和 L2 之間的傳送通常使用的是幾十個個字大小的塊,而 L5 和 L4 之間的傳送用的是大小為幾百或者幾千字節(jié)的塊。一般而言,層次結(jié)構(gòu)中較低層(離 CPU 較遠(yuǎn))的設(shè)備的訪問時間較長,因此為了補(bǔ)償這些較長的訪問時間,傾向于使用較大的塊。
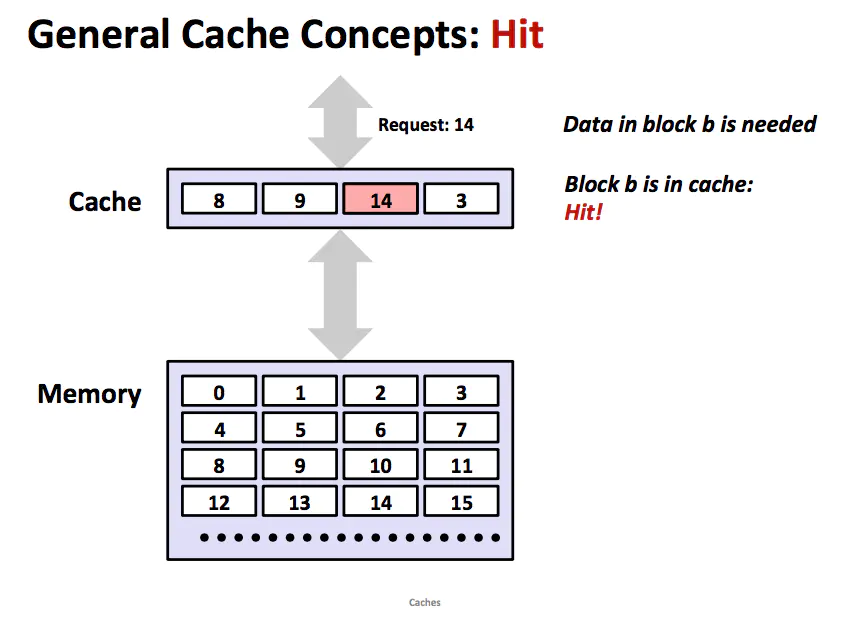
cache hit
當(dāng)程序需要第 k+1 層的某個數(shù)據(jù)對象 d 時,它首先會在當(dāng)前存儲在第 k 層的一個塊中查找 d。如果 d 剛好緩存在第 k 層,那么就是緩存命中。該程序直接從第 k 層讀取 d,根據(jù)存儲器層次結(jié)構(gòu)的性質(zhì),從 k 層讀取數(shù)據(jù)顯然比從 k+1 層讀取數(shù)據(jù)更快。如上圖所示,一個具有良好時間局部性的程序可以從塊 14 中讀出一個數(shù)據(jù)對象,得到一個對 k 層的緩存命中 。
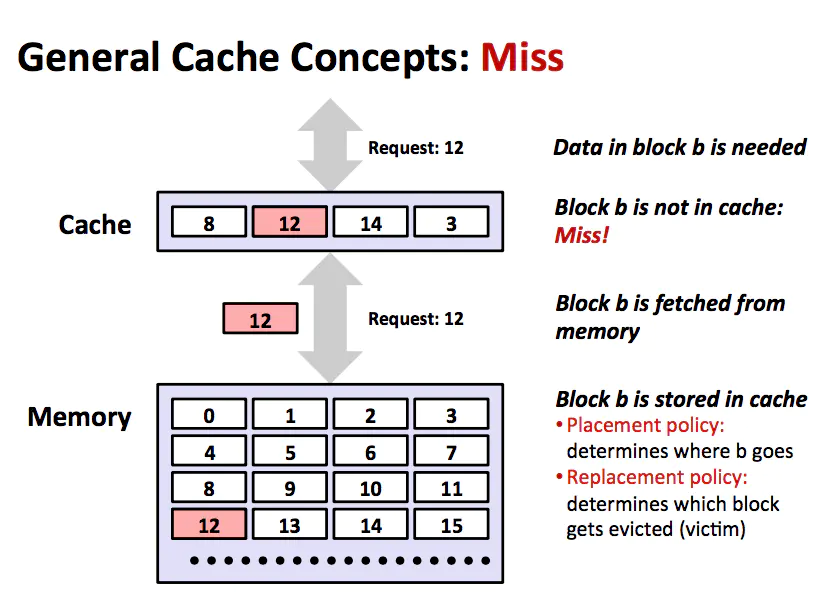
cache miss
如果第 k 層中沒有緩存數(shù)據(jù)對象 d,那么就是我們所說的緩存不命中 (cache miss)。當(dāng)發(fā)生緩存不命中時,第 k 層的緩存從第 k+1 層緩存中取出包含 d 的那個塊,如果第 k 層的緩存已經(jīng)滿了,那么可能會覆蓋現(xiàn)存的一個塊。覆蓋一個現(xiàn)存的一個塊的過程稱為替換或者驅(qū)逐。被替換的塊有時也稱作犧牲塊。決定替換哪個塊是由緩存的替換策略來控制的,替換策略有隨機(jī)替換和最近最少被使用(LRU)替換策略。
高速緩存存儲器
早期的計算機(jī)系統(tǒng)的存儲器結(jié)構(gòu)只有三層:CPU 寄存器, DRAM 主存,磁盤。由于 CPU 和主存之間逐漸增大的速度差距,系統(tǒng)設(shè)計者在 CPU 和 主存之間插入了一個小的 SRAM 高速緩存存儲器,稱為 L1 高速緩存。隨著 CPU 和主存之間逐漸增大的速度差距,系統(tǒng)設(shè)計者在 L1 和 主存之間插入了一個更大的 SRAM 高速緩存存儲器,稱為 L2 高速緩存。
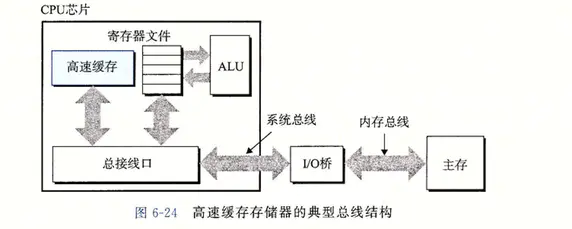
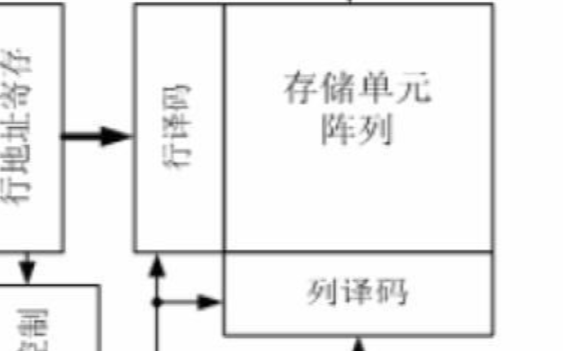
高速緩存存儲器的典型總線結(jié)構(gòu)
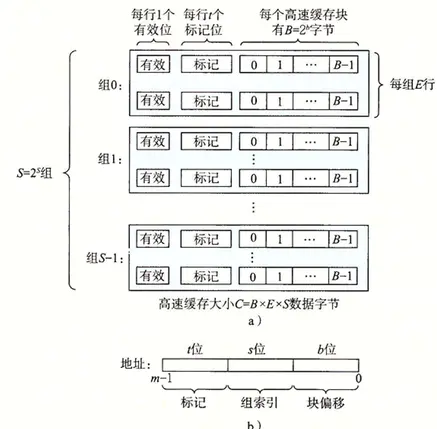
假設(shè)一個計算機(jī)系統(tǒng),其中每個存儲器地址 m 位,形成 M = 2^m 個不同的地址。如下圖所示。一個機(jī)器的高速緩存被組織成一個有 S = 2^s 個高速緩存組(cache set)的數(shù)組。每個組包含 E 個高速緩存行(cache line),每個行由一個 B = 2^b 字節(jié)的數(shù)據(jù)塊組成,一個有效位(valid bit)指明這個行是否有效,t = m -(s+b)個標(biāo)記位(tab bit),他們唯一地標(biāo)識存儲在這個高速緩存行中的塊。
Cache Organization
根據(jù)每個組的高速緩存行數(shù) E,高速緩存可以被分為不同的類,每個組只有一行(E = 1)的高速緩存成為直接映射高速緩存。下面我們以直接映射高速緩存來講解。
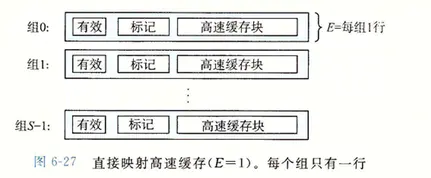
E=1
假設(shè)有這么一個系統(tǒng),它有一個 CPU,一個寄存器文件,一個 L1 高速緩存和一個主存。當(dāng) CPU 執(zhí)行一條讀內(nèi)存字 w 的指令,它向 L1 請求這個字,如果 L1 有 w 的副本,那么 L1 高速緩存命中,高速緩存取出 w,返回給 CPU。
若是不命中,當(dāng) L1 向主存請求包含 w 的塊的副本時,CPU 必須等待。當(dāng)被請求的塊從內(nèi)存到達(dá) L1 時,L1 將這個塊存放在它的一個高速緩存行里面,然后取出 w,返回給 CPU 。高速緩存上面的工作過程分為 3 個步驟:
組選擇
行匹配
字抽取
第一步,直接映射高速緩存的組選擇。高速緩存從 w 中取出 s 個組索引位。例子中的組索引位 00001 定位到組 1。
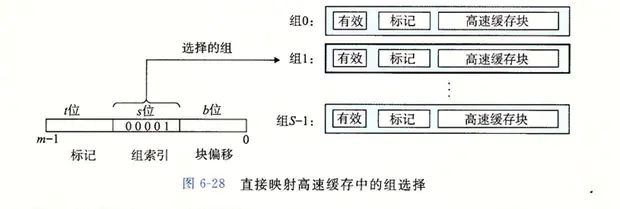
直接映射高速緩存的組選擇
第二步,直接映射高速緩存的行匹配。由于只有一個高速緩存行,而且有效位也設(shè)置了,所以這個行是有用的,從 w 中取出標(biāo)記位 t ,與高速緩存行中的標(biāo)記位相匹配,所以緩存命中。
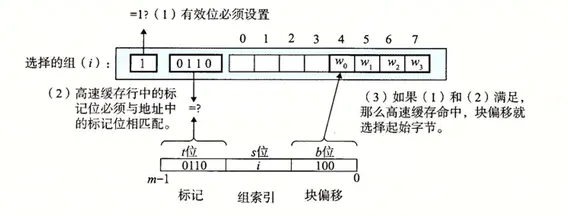
直接映射高速緩存的行匹配
第三步,直接映射高速緩存的字選擇。一旦緩存命中,那么我們就知道 w 就在這個塊中的某個位置。我們把塊看成一個字節(jié)的數(shù)組,而字節(jié)偏移是到這個數(shù)組的索引。所以最后一步是確定所需要的字在塊中的偏移位置。例子中的塊偏移是 100,它說明了 w 的副本是從塊中的字節(jié) 4 開始的(假設(shè)字長為 4 字節(jié))。
第四步,直接映射高速緩存不命中的行替換。如果緩存不命中,那么它需要從存儲器層次結(jié)構(gòu)中的下一層取出被請求的塊,然后將新的塊存儲在一個高速緩存行中。對于直接映射高速緩存來說,每個組只要一個行,替換策略就是用新取出的行替換當(dāng)前的行。
編寫高速緩存友好的代碼
確保代碼高速緩存友好的基本方法有 2 種,
讓最常見的情況運行的快。
盡量減少每個循環(huán)內(nèi)部的緩存不命中數(shù)量。
int?sumvec(int?v[n])
{
??int?i,?sum?=?0;
??for?(i?=?0;?i?
首先對于局部變量 i 和 sum,循環(huán)體有良好的時間局部性。對數(shù)組 v 的步長為 1 的引用,對 v[0] 的引用會不命中,而對應(yīng)的 v[0] ~ v[3] 的塊會被從內(nèi)存加載到高速緩存中,因此接下來的三個引用都會命中,以此類推,四個引用中,三個會命中,這個是我們能做到的最好的情況了,具有良好的空間局部性。
總結(jié)
作為一個程序員需要理解存儲器的結(jié)構(gòu)層次,因為它對應(yīng)用程序的性能有巨大的影響。如果你的程序需要的數(shù)據(jù)是存儲在 CPU 寄存器中的,那么在指令的執(zhí)行期間,在 0 個周期內(nèi)就可以訪問到它們,如果在高速緩存中,需要 4 ~ 75 個周期。
如果存儲在主存中,需要上百個周期,如果存儲在磁盤上,大約需要幾千萬個周期。如果理解了系統(tǒng)是如何將數(shù)據(jù)再存儲器層次結(jié)構(gòu)中上上下下移動的,那么就可以在編寫自己的應(yīng)用程序的時候使得他們的數(shù)據(jù)項存儲在結(jié)構(gòu)層次中較高的地方,以便 CPU 可以更快的訪問到它們。
編程時候可以注意以下幾點,讓程序性能更好!
1.重復(fù)引用同一個變量的程序有良好的時間局部性;
2.具有步調(diào)長度為k的引用模式程序,步調(diào)越小,空間局部性越好;
3.循環(huán)通常具有很好的空間局部性?&?時間局部性;
4.數(shù)組通常具有很好的空間局部性;
參考
本文是華盛頓大學(xué)的公開課 《 The Hardware / Software Interface 》的課程筆記,該課程的參考書籍是大名鼎鼎的 CSAPP 也就是《 深入理解計算機(jī)系統(tǒng) 》這書。文章截圖來源于課程,文章的內(nèi)容也參考了 CSAPP 的書本內(nèi)容。
審核編輯:黃飛
?












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論