據(jù)麥姆斯咨詢(xún)報(bào)道,物聯(lián)網(wǎng)及雙目視覺(jué)專(zhuān)家鉅芯發(fā)布了一款智能雙目立體視覺(jué)系統(tǒng),以及業(yè)內(nèi)首顆智能雙目立體視覺(jué)芯片eagleye100。
2017-10-26 10:26:21 9961
9961 雙目立體視覺(jué)中常用的基于區(qū)域的局部匹配準(zhǔn)則主要有圖像序列中對(duì)應(yīng)像素差的絕對(duì)值之和SAD(sum of absolute differences)、對(duì)應(yīng)像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
2023-07-01 09:34:021117 
由大聯(lián)大世平推出的基于NXP S32V234雙目立體視覺(jué)解決方案,可顯著提高物體識(shí)別率以及識(shí)別種類(lèi),從而進(jìn)一步完善ADAS領(lǐng)域的相關(guān)應(yīng)用。
2021-05-18 14:13:291043 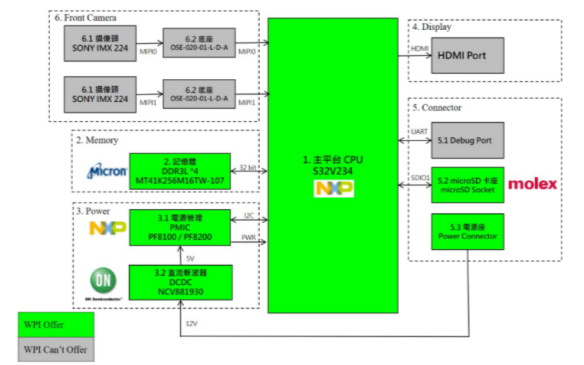
,然后通過(guò)三角測(cè)量原理計(jì)算圖像像素間的位置偏差(視差)來(lái)獲取景物的三維信息。這一過(guò)程與人類(lèi)視覺(jué)感知過(guò)程是類(lèi)似的。 雙目立體視覺(jué)測(cè)量示意圖 在雙目立體視覺(jué)系統(tǒng)的硬件結(jié)構(gòu)中,通常采用兩個(gè)攝像機(jī)作為
2020-12-01 15:08:04
雙目攝像頭可以計(jì)算長(zhǎng)度,那么他可以計(jì)算出高度或者對(duì)障礙物的距離嗎?還有他是怎么計(jì)算長(zhǎng)度的,有沒(méi)有公式
2023-09-28 06:55:56
`雙目立體視覺(jué)原理大揭秘(一)——雙目視覺(jué)導(dǎo)航、定位;雙目立體視覺(jué)是一門(mén)有著廣闊應(yīng)用前景的學(xué)科,根據(jù)雙目立體視覺(jué)CCAS提供的思路及組成原理,隨著光學(xué)、電子學(xué)以及計(jì)算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸
2013-11-21 16:20:51
`雙目立體視覺(jué)原理大揭秘(二)——三維重構(gòu)雙目立體視覺(jué)是一門(mén)有著廣闊應(yīng)用前景的學(xué)科,根據(jù)雙目立體視覺(jué)CCAS提供的思路及組成原理,隨著光學(xué)、電子學(xué)以及計(jì)算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸實(shí)用化,不僅
2013-11-21 16:22:03
雙目立體視覺(jué)(BinocularStereoVision)是機(jī)器視覺(jué)的一種重要形式,因其可簡(jiǎn)單地利用左右攝像機(jī)中的圖像信息計(jì)算得到相機(jī)視野中物體相對(duì)于攝像機(jī)的深度信息使得該技術(shù)擁有廣泛的應(yīng)用前景
2021-12-23 07:19:52
高速相機(jī)對(duì)目標(biāo)位進(jìn)行攝像,充當(dāng)人的雙眼的功能,然后通過(guò)系統(tǒng)軟件處理,可以確定任意物體的三維輪廓,還可以得到輪廓上任意點(diǎn)的三維坐標(biāo)。基于雙目立體視覺(jué)這種強(qiáng)大的技術(shù)功能,不但在軍事科研上有所運(yùn)用,如航天遙測(cè)
2016-03-03 09:36:59
本章將介紹計(jì)算機(jī)視覺(jué)中最核心傳感器-攝像頭的基本使用,主要講解了CSI攝像頭,USB攝像頭,網(wǎng)絡(luò)攝像頭的基本使用。
2020-11-06 06:47:57
本帖最后由 埥茬適里瀭叺妏牸 于 2018-5-30 09:09 編輯
視覺(jué)——打開(kāi)USB攝像頭,之前有朋友說(shuō),版本太高,打不開(kāi),現(xiàn)在上傳一份2012版本的。
2018-05-23 14:29:30
ATK-OV2640攝像頭模塊 MODULE_100X180MM 70~370mA
2023-03-28 13:05:53
最近在做一個(gè)雙目立體視覺(jué)項(xiàng)目,LABVIEW有模塊嗎,有哪位大神用LABVIEW做過(guò)
2018-01-13 19:44:32
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw雙目立體視覺(jué)系統(tǒng)使用兩只相機(jī)同步采集圖像,通過(guò)像素匹配獲得深度圖像,進(jìn)而獲取三維點(diǎn)云,系統(tǒng)結(jié)構(gòu)如下。用下圖來(lái)解釋雙目視覺(jué)的基本原理:圖中所示變量為
2020-03-02 17:03:12
MT9V034攝像頭模塊 MODULE_27.5X31.5MM 44.5mA
2023-03-28 13:06:39
OV5640雙目攝像頭模塊 MODULE_59X40MM 270mA 3.3V
2023-03-28 13:06:39
OV5640攝像頭模塊 MODULE_24X32MM 75mA 3.3V
2023-03-28 13:06:39
OV7670攝像頭模塊是如何實(shí)現(xiàn)攝像頭畫(huà)面上傳到onenet的?
2021-09-30 08:53:23
RK3288接雙目攝像頭怎么操作?
2022-03-03 07:31:16
問(wèn)題描述及復(fù)現(xiàn)步驟:請(qǐng)問(wèn),AIO-3568J的板子,配套mipi攝像頭為CAM-2MS2MF 雙目攝像頭模組,采用雙目攝像頭模組的Ubuntu系統(tǒng)固件刷機(jī),都不能正常驅(qū)動(dòng)攝像頭,這是怎么回事?
2022-08-25 16:58:27
WIFI攝像頭模塊 MODULE_29X23MM 300mA 3.3~24V
2023-03-28 13:06:38
請(qǐng)教大神,我有一個(gè)u***攝像頭(也可買(mǎi)直接視頻輸出的那種攝像頭),有線(xiàn)連接也想過(guò),想把它改成可以實(shí)時(shí)監(jiān)控水下魚(yú)情的無(wú)線(xiàn)攝像頭(有線(xiàn)的挑手機(jī)型號(hào),很多手機(jī)不能用。)攝像頭通過(guò)u***連線(xiàn)連接水面的有
2018-01-31 23:26:08
距離感,目前的單目視覺(jué)系統(tǒng)得到的景深只是一個(gè)比例值,這是因?yàn)椋p面視覺(jué)系統(tǒng)的兩個(gè)攝像頭的距離是已知的。另外雙面使用的是塊的特制匹配可以生成致密的景深圖,而單目使用是兩張圖的特征點(diǎn)計(jì)算出距離比例,獲得
2017-09-17 17:56:27
項(xiàng)目名稱(chēng):基于雙目攝像頭的視覺(jué)景深算法開(kāi)發(fā)試用計(jì)劃:1.在這個(gè)試用活動(dòng)剛開(kāi)始的時(shí)候我就申請(qǐng)了,但是很遺憾沒(méi)有通過(guò)。由于工作的原因我在今年開(kāi)發(fā)了一套本來(lái)打算用于VR設(shè)備設(shè)備的雙目手勢(shì)識(shí)別硬件
2017-08-21 12:42:45
內(nèi)核, 主頻可達(dá)1GHz, 可大大提高視覺(jué)處理的效率項(xiàng)目描述:該項(xiàng)目是五子棋機(jī)器人研發(fā)的一部分, 通過(guò)雙目攝像頭檢測(cè)出五子棋的位置, 測(cè)算出其全場(chǎng)坐標(biāo), 然后移動(dòng)過(guò)去抓取棋子
2015-08-09 07:48:55
申請(qǐng)理由:1、使用路由芯片天生的優(yōu)勢(shì)進(jìn)行無(wú)線(xiàn)傳輸;2、使用無(wú)線(xiàn)路由芯片的基本性能進(jìn)行多目攝像頭視頻/圖像采集;3、嘗試使用開(kāi)源openWRT開(kāi)源平臺(tái)加快開(kāi)發(fā)進(jìn)度,并驗(yàn)證其性能;項(xiàng)目描述:采集雙目
2015-09-10 11:26:04
申請(qǐng)理由:之前用wrtnode的u***接雙攝像頭外加一個(gè)么mcu實(shí)現(xiàn)過(guò)一個(gè)一個(gè)雙目視覺(jué)隨動(dòng)平臺(tái),這樣太麻煩了,希望能用這個(gè)來(lái)實(shí)現(xiàn)一個(gè)更簡(jiǎn)單的解決方案。項(xiàng)目描述:u***接雙攝像頭,mcu控制云臺(tái)。通過(guò)WIFI將雙目視覺(jué)傳遞到手機(jī)進(jìn)行顯示,同時(shí)將手機(jī)的角度信息返回,控制云臺(tái)轉(zhuǎn)動(dòng)。
2015-09-10 11:25:10
`收到開(kāi)發(fā)版了解相關(guān)資料后,針對(duì)寵物機(jī)器人項(xiàng)目對(duì)尚安森美u***雙目攝像頭模組和本寵物機(jī)器人項(xiàng)目的相關(guān)功能進(jìn)行PC端功能測(cè)試和開(kāi)發(fā)試用。本項(xiàng)目本次測(cè)試是采用python配合openvc以及
2020-10-20 00:16:33
`本人對(duì)人臉識(shí)別技術(shù)非常感興趣,這次剛好看到了感光芯片雙目攝像頭的試用申請(qǐng),果斷下手,并且非常榮幸獲得了測(cè)評(píng)的機(jī)會(huì)。我主要想要通過(guò)該款模組實(shí)現(xiàn)校園的人臉識(shí)別打卡,應(yīng)用場(chǎng)景也包括進(jìn)出校人員的自動(dòng)識(shí)別
2020-08-28 19:01:20
本人對(duì)人臉識(shí)別技術(shù)非常感興趣,這次剛好看到有機(jī)會(huì)可以申請(qǐng)感光芯片USB雙目攝像頭的評(píng)測(cè),于是果斷下手報(bào)名參加,非常榮幸獲得了測(cè)評(píng)的機(jī)會(huì)。我主要想通過(guò)這款雙目攝像頭模組開(kāi)發(fā)一套校園人臉識(shí)別的簽到打卡
2020-08-28 19:34:56
`本人對(duì)人臉識(shí)別技術(shù)非常感興趣,這次剛好看到有機(jī)會(huì)可以申請(qǐng)感光芯片USB雙目攝像頭的評(píng)測(cè),于是果斷下手報(bào)名參加,非常榮幸獲得了測(cè)評(píng)的機(jī)會(huì)。我主要想通過(guò)這款雙目攝像頭模組開(kāi)發(fā)一套校園人臉識(shí)別的簽到打卡
2020-08-28 19:44:52
`本人對(duì)人臉識(shí)別技術(shù)非常感興趣,這次剛好看到有機(jī)會(huì)可以申請(qǐng)感光芯片USB雙目攝像頭的評(píng)測(cè),于是果斷下手報(bào)名參加,非常榮幸獲得了測(cè)評(píng)的機(jī)會(huì)。我主要想通過(guò)這款雙目攝像頭模組開(kāi)發(fā)一套校園人臉識(shí)別的簽到打卡
2020-08-28 19:57:39
。因?yàn)楣庹盏牟煌瑫?huì)對(duì)識(shí)別的效果產(chǎn)生質(zhì)的影響。因?yàn)槟壳暗?b class="flag-6" style="color: red">視覺(jué)系統(tǒng)只是認(rèn)為識(shí)別到的是一個(gè)多通道的平面圖像,而再此基礎(chǔ)上做出了圖像的處理(濾波,灰度等)從目前的效果來(lái)看,這款雙目攝像頭在正常光和無(wú)光的情況下表現(xiàn)都十分中規(guī)中舉,所以下面我們將進(jìn)入到 基于Qt框架的圖像識(shí)別技術(shù)。
2020-09-26 21:54:29
觀(guān)屏鏡看到立體效果的。計(jì)劃下一篇測(cè)試不同光源(色溫、光強(qiáng))下的攝像頭效果(只有HDR,那只能測(cè)HDR了,倒是真的想試試IR)計(jì)劃再下一篇回歸OpenVino,結(jié)合攝像頭來(lái)試試
2020-09-23 13:50:16
`之前一直對(duì)雙目攝像頭抱有很大的興趣,特別是看到朋友公司開(kāi)發(fā)的帶人眼追蹤的裸眼3D顯示系統(tǒng)。當(dāng)然他們使用的是intel的Intel RealSense D415/D435/D435i系列,這次剛好
2020-08-24 14:56:06
進(jìn)行開(kāi)箱的介紹該攝像頭模塊采用兩個(gè)200W像素的攝像頭組成。而左右兩側(cè)的Led 則是為補(bǔ)光而設(shè)定正面和背面的照片,而是比較充分的利用了pcb的空間,而雙目攝像頭一般為對(duì)稱(chēng)攝像頭設(shè)計(jì),可以模擬人眼看
2020-09-02 09:52:23
`發(fā)帖人:tobot我們知道樹(shù)莓派是當(dāng)前最火的開(kāi)發(fā)板(之一都可以去掉),不能不說(shuō)那攝像頭接在樹(shù)莓派上做一評(píng)測(cè),當(dāng)然了我這里的攝像頭的確有點(diǎn)小問(wèn)題(其中一個(gè)沒(méi)圖像)但不影響我連上了看看,單獨(dú)接任意一個(gè)
2020-09-23 11:58:54
輔助手段,比如lx530激光測(cè)距模塊(我手上正好有),識(shí)別真人(立體)和照片(平面)還是有可能的。這個(gè)項(xiàng)目估計(jì)比較花時(shí)間,預(yù)計(jì)在神經(jīng)棒試用完成后(9月初)開(kāi)始。3、在本次參加試用的攝像頭模組是雙目攝像頭
2020-08-10 18:02:48
項(xiàng)目名稱(chēng):敏感人群自動(dòng)追蹤系統(tǒng)試用計(jì)劃:申請(qǐng)理由本人對(duì)人工智能視覺(jué)識(shí)別技術(shù)比較熟悉,對(duì)openvino、TensorFlow、python、C++等比較熟悉。想用這個(gè)雙目攝像頭模組
2020-08-10 18:02:40
本文將探討機(jī)器視覺(jué)應(yīng)用的 CMOS 圖像感應(yīng)器技術(shù)及架構(gòu)要求。此外,還將詳細(xì)分析機(jī)器視覺(jué)的基本組件,攝像頭為滿(mǎn)足應(yīng)用需求需要哪些條件,以及如何設(shè)計(jì)出可滿(mǎn)足各種機(jī)器視覺(jué)應(yīng)用需求、同時(shí)又能在圖像質(zhì)量
2019-07-19 04:30:00
【視頻教程】紫光同創(chuàng)盤(pán)古50K開(kāi)發(fā)板&雙目攝像頭操作演示@小眼睛FPGA盤(pán)古系列開(kāi)發(fā)板~
2023-06-12 11:23:45
`回收手機(jī)攝像頭,大量收購(gòu)手機(jī)攝像頭!!! 帝歐電子 趙先生 TEL:135-3012-2202 QQ:879821252 帝歐電子專(zhuān)業(yè)電子收購(gòu),現(xiàn)急購(gòu)攝像頭,大量回收攝像頭!手機(jī)攝像頭高價(jià)收購(gòu)
2021-07-05 11:01:56
,快速、精確的獲得被測(cè)對(duì)象的全場(chǎng)位移應(yīng)變信息,在各個(gè)研究領(lǐng)域得到了廣泛應(yīng)用。 立體視覺(jué)是由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺(jué)利用兩臺(tái)不同位置的攝像機(jī)同時(shí)拍攝,或由一臺(tái)相機(jī)變換位置后分時(shí)拍攝以
2015-09-21 10:11:12
手里有一塊AT32的開(kāi)發(fā)板和一個(gè)OV2640攝像頭模塊,因?yàn)樽鲋悄苘?chē)模型需要一個(gè)攝像頭,就想能不能廢物利用一下,用這倆做一個(gè)即插即用的USB攝像頭,能夠直接用在樹(shù)莓派的Linux系統(tǒng)上,而不需要
2021-08-06 06:22:09
`相比于單目視覺(jué),雙目視覺(jué)(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對(duì)同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。恩智浦視覺(jué)ADAS專(zhuān)用SoC: S32V234未來(lái)十年
2017-08-12 15:15:52
OV2640是什么?OV2640攝像頭模塊的特點(diǎn)有哪些?如何對(duì)OV2640攝像頭模塊進(jìn)行DCMI配置?
2021-10-15 08:24:43
您好: 我用的ROC3568雙目攝像頭,如何修改幀率為30呢?多謝!
2022-06-21 09:20:04
已生成兩種視頻源的 sbit,大家可直接下載,觀(guān)察實(shí)驗(yàn)現(xiàn)象。步驟 3:連接HDMI 顯示器、Double_OV5640 雙目攝像頭,將sbit 下載到開(kāi)發(fā)板中,實(shí)驗(yàn)現(xiàn)象如下:LED 指示:更多實(shí)驗(yàn)教程敬請(qǐng)關(guān)注!
2023-04-18 16:45:09
怎樣去設(shè)置RK3288 android 8.1的雙目攝像頭的功能呢?
2022-03-03 09:45:52
。 此計(jì)算將按每個(gè)像素進(jìn)行,結(jié)果將用于產(chǎn)生三維圖像數(shù)據(jù)的點(diǎn)圖。與其它 3D 成像方法相比,如使用兩個(gè)攝像頭產(chǎn)生立體視覺(jué)或?qū)⒔Y(jié)構(gòu)化光圖案投射到場(chǎng)景上并測(cè)量失真方式,TOF 技術(shù)在物理緊湊性、響應(yīng)
2017-04-12 14:44:45
有什么方法可以將雙目攝像頭結(jié)合OpenCV一起使用嗎?
2022-03-02 09:52:05
開(kāi)發(fā)板硬件使用手冊(cè)”及原理圖)
二、Double_OV5640 雙目攝像頭簡(jiǎn)介:
Double_OV5640雙目攝像頭模組采用美國(guó)OmniVision(豪威)CMOS芯片圖像傳感器OV5640
2023-06-13 16:01:09
的模型及工作空間代碼,方便用戶(hù)下一步開(kāi)發(fā)。特征捕捉部分隨著最終用戶(hù)的使用方面不同,不能一概而論,所以需要用戶(hù)自己去實(shí)現(xiàn)。但在這方面,維視雙目立體視覺(jué)產(chǎn)品也提供了貼心的支持,從圖像預(yù)處理算法,到豐富的行業(yè)
2016-01-19 16:59:12
成像對(duì)于許多機(jī)器人應(yīng)用至關(guān)重要,能讓機(jī)器人執(zhí)行基本任務(wù),躲避障礙物,進(jìn)行導(dǎo)航以及確保基本安全。 顯然,提供成像的方式是采用低成本視頻攝像頭,或者再好點(diǎn),使用兩個(gè)攝像頭實(shí)現(xiàn)立體視野和深度感知。 但后者
2020-11-27 06:20:37
本人最近在學(xué)習(xí)LabVIEW視覺(jué)模塊,論文題目也是關(guān)于車(chē)站監(jiān)控和機(jī)器視覺(jué)的,但是挑選和使用攝像頭方面遇到了很大的問(wèn)題。 開(kāi)始是使用的簡(jiǎn)單的USB攝像頭做一些基礎(chǔ)的東西,進(jìn)一步學(xué)習(xí)需要高級(jí)一點(diǎn)的攝像頭
2016-11-05 20:23:42
斑梨電子 樹(shù)莓派攝像頭自動(dòng)對(duì)焦1600萬(wàn)像素IMX519高清攝像頭模塊1600萬(wàn)像素高清攝像頭樹(shù)莓派自動(dòng)對(duì)焦IMX519攝像頭模塊1600 萬(wàn)像素,自動(dòng)對(duì)焦,78.5°視場(chǎng)角產(chǎn)品參數(shù)感光
2022-07-30 15:31:55
本文提出了一種雙目立體視覺(jué)的幾何解法,通過(guò)分別獲取場(chǎng)景中某物體在左右攝像機(jī)中投影點(diǎn)的實(shí)際像素坐標(biāo),利用標(biāo)定得到的攝像機(jī)內(nèi)參數(shù),求得投影點(diǎn)的理想圖像坐標(biāo)。然后
2009-12-30 17:01:19 14
14 Intel RealSense?深度攝像頭D455Intel Realsense深度攝像頭D455采用立體聲攝像頭,可為各種用途提供出色的深度信息。立體聲攝像頭在室內(nèi)和室外均能正常工作,因此非常適合
2024-02-27 11:51:25
0 引言 雙目立體視覺(jué)測(cè)量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計(jì)算機(jī)視覺(jué)系統(tǒng)中,雙目立體視覺(jué)測(cè)量一般由雙攝像機(jī)從不
2010-09-26 17:07:031051 
雙目立體視覺(jué)的研究一直是機(jī)器視覺(jué)中的熱點(diǎn)和難點(diǎn)。使用雙目立體視覺(jué)系統(tǒng)可以確定任意物體的三維輪廓,并且可以得到輪廓上任意點(diǎn)的三維坐標(biāo)。因此雙目立體視覺(jué)系統(tǒng)可以應(yīng)用在
2011-04-08 17:51:29130 根據(jù)雙目立體視覺(jué)傳感器三角立體視差模型,建立了結(jié)構(gòu)參數(shù)誤差的傳遞函數(shù),分析了雙目視覺(jué)傳感器結(jié)構(gòu)參數(shù)及其誤差傳遞規(guī)律對(duì)傳感器綜合測(cè)量精度的影響,得出了結(jié)構(gòu)參數(shù)的合理
2011-09-06 14:38:4075 介紹了雙目立體視覺(jué)在光電子器件自動(dòng)對(duì)接系統(tǒng)中的應(yīng)用。該系統(tǒng)以線(xiàn)性成像模型為基礎(chǔ)建立了雙目立體視覺(jué)系統(tǒng)的數(shù)學(xué)模型,介紹了視覺(jué)系統(tǒng)標(biāo)定的實(shí)現(xiàn),包括標(biāo)定點(diǎn)提取、特征點(diǎn)定
2011-10-11 15:15:4263 攝像機(jī)標(biāo)定是機(jī)器視覺(jué)和攝像測(cè)量領(lǐng)域相對(duì)基礎(chǔ)的工作,同時(shí)也是最復(fù)雜、困難的T作。攝像機(jī)標(biāo)定的意義是得到立體空間中對(duì)象的幾何信息,其中所使用的圖像信息由雙目攝像機(jī)所得。定后的雙目攝像機(jī)得到的圖像目標(biāo)信息
2017-11-06 14:41:0530 視覺(jué)是通過(guò)三維世界所感知的二維圖像來(lái)研究和提取出三維景物世界的物理結(jié)構(gòu)。所謂的立體視覺(jué),是基于人眼視差的原理,由不同位置的兩臺(tái)或多臺(tái)攝像機(jī)對(duì)同一物體進(jìn)行拍攝,然后通過(guò)對(duì)同一物體不同圖像中的視差,計(jì)算出物體在
2017-11-08 16:20:3418 針對(duì)虛擬現(xiàn)實(shí)領(lǐng)域現(xiàn)有的顯示模塊無(wú)法提供滿(mǎn)足人眼視覺(jué)規(guī)律的立體視覺(jué)效果這一問(wèn)題,提出一種基于斜交視錐體立體攝像機(jī)模型的虛擬現(xiàn)實(shí)(VR)立體視覺(jué)解決方案。首先,通過(guò)研究人眼視域模型和人眼雙目提取深度信息
2018-01-03 16:03:441 針對(duì)國(guó)內(nèi)外橋梁裂縫測(cè)量效率低、成本高、精度低等現(xiàn)狀,提出了一種基于雙目立體視覺(jué)技術(shù)的橋梁裂縫測(cè)量系統(tǒng)。采用相機(jī)標(biāo)定、圖像匹配、三維坐標(biāo)計(jì)算等雙目立體視覺(jué)技術(shù)對(duì)橋梁裂縫的寬度和長(zhǎng)度進(jìn)行計(jì)算,實(shí)現(xiàn)了橋梁
2018-01-16 14:59:590 隨著自動(dòng)化程度越來(lái)越高,機(jī)器視覺(jué)扮演著越來(lái)越重要的角色,傳統(tǒng)的2D定位無(wú)法解決產(chǎn)品的空間坐標(biāo)信息,而3D雙目立體視覺(jué)可提供較高精度的定位。
2018-02-02 10:54:4915431 雙目立體視覺(jué)是機(jī)器視覺(jué)的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺(jué)系統(tǒng)一般由雙攝像機(jī)從不同角度同時(shí)獲得被測(cè)物的兩幅數(shù)字圖像,或由單攝像機(jī)在不同時(shí)刻從不同角度
2018-02-08 14:46:2449071 雙目立體視覺(jué)是基于視差,由三角法原理進(jìn)行三維信息的獲取,即由兩個(gè)攝像機(jī)的圖像平面和北側(cè)物體之間構(gòu)成一個(gè)三角形。一直兩個(gè)攝像機(jī)之間的位置關(guān)系,便可以獲得兩攝像機(jī)公共視場(chǎng)內(nèi)物體的三維尺寸及空間物體特征點(diǎn)的三維坐標(biāo)。所以,雙目視覺(jué)系統(tǒng)一般由兩個(gè)攝像機(jī)構(gòu)成。
2018-04-11 14:32:5523098 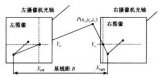
依托自主研發(fā)的嵌入式主動(dòng)/被動(dòng)雙目立體視覺(jué)技術(shù),人加已經(jīng)推出雙目AI攝像頭產(chǎn)品——“司眸”系列,可以為各類(lèi)機(jī)器人提供立體視覺(jué)感知解決方案,讓機(jī)器人擁有人體感知、自主避障等視覺(jué)智能,為下游客戶(hù)提供成熟、可量產(chǎn)的解決方案。
2018-06-07 14:44:085570 雙目立體視覺(jué)測(cè)量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計(jì)算機(jī)視覺(jué)系統(tǒng)中,雙目立體視覺(jué)測(cè)量一般由雙攝像機(jī)從不同的角度同時(shí)獲取周?chē)拔锏膬煞鶊D像,或有單攝像機(jī)在不同時(shí)刻從不同角度獲取周?chē)拔锏膬煞鶖?shù)字圖像,并基于視差原理即可恢復(fù)出物體的三維幾何模型,重建周?chē)拔锏娜S形狀與位置。
2018-12-29 08:50:004102 智能雙目立體視覺(jué)芯片模擬人的“雙眼”,給車(chē)輛加上一雙“眼睛”,將二維成像變?yōu)槿S成像。
2018-10-08 15:31:127052 目前的深度相機(jī)根據(jù)其工作原理可以分為三種:TOF相機(jī)、雙相機(jī)立體視覺(jué)、結(jié)構(gòu)光投射立體視覺(jué)。
2019-05-14 09:04:587615 雙目立體視覺(jué)測(cè)量是人類(lèi)利用雙眼獲取環(huán)境三維信息的主要途徑。隨著計(jì)算機(jī)視覺(jué)理論的發(fā)展,雙目立體視覺(jué)測(cè)量在工業(yè)測(cè)量中發(fā)揮了越來(lái)越重要的作用,具有廣泛的適用性。 本論文的主要研究?jī)?nèi)容是基于雙目立體視覺(jué)
2019-11-26 12:05:396 提出一種三目立體視覺(jué)外極線(xiàn)校正的快速算法.3個(gè)攝像機(jī)呈直角三角形配置,且已知攝像機(jī)透視投影矩陣。根據(jù)校正基本約束確定校正后的圖像平面,利用圖像不變形約束計(jì)算校正所需的三階矩陣,用于在平面仿射坐標(biāo)
2021-04-01 10:27:2912 本文給出一種實(shí)時(shí)計(jì)算場(chǎng)景稠密深度圖的多目立體視覺(jué)機(jī)設(shè)計(jì)與實(shí)現(xiàn)方法。立體視覺(jué)機(jī)使用多個(gè)微型攝像機(jī)同步獲取場(chǎng)景圖像,采用圖像修正、LoG濾波、多立體圖像對(duì)匹配和稠密深度圖等并行算法,利用FPGA的大規(guī)模
2021-04-02 09:33:0021 雙目立體視覺(jué)技術(shù)具有成本低、適用性廣的優(yōu)點(diǎn),在物體識(shí)別、目標(biāo)檢測(cè)等方面應(yīng)用廣泛,成為計(jì)算機(jī)視覺(jué)領(lǐng)域的研究熱點(diǎn)。立體匹配是雙目立體視覺(jué)技術(shù)中的核心算法,對(duì)實(shí)現(xiàn)物體三維重建具有重要作用。在分析局部、全局
2021-04-12 09:47:543 前言 雙目立體視覺(jué),由兩個(gè)攝像頭組成,像人的眼睛能看到三維的物體,獲取物體長(zhǎng)度、寬度信息,和深度的信息;單目視覺(jué)獲取二維的物體信息,即長(zhǎng)度、寬度。 1)雙目攝像頭 常見(jiàn)的雙目攝像頭有以下幾款: 能看
2021-04-26 14:19:438965 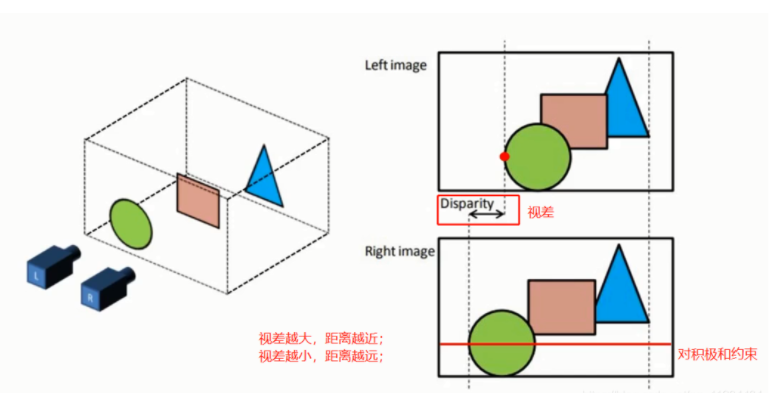
雙目視覺(jué)技術(shù)的原理、結(jié)構(gòu)、特點(diǎn)、發(fā)展現(xiàn)狀和發(fā)展方向分析 雙目立體視覺(jué)是機(jī)器視覺(jué)的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。 雙目立體視覺(jué)系統(tǒng)一般由雙攝像機(jī)從不同角度同時(shí)
2021-06-01 16:36:562223 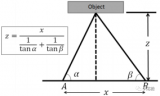
面向雙目立體視覺(jué)的迭代式局部顏色校正方法
2021-06-21 14:42:045 深度信息恢復(fù)是計(jì)算機(jī)視覺(jué)領(lǐng)域的一個(gè)重要研究?jī)?nèi)容。使用傳統(tǒng)的光學(xué)成像系統(tǒng)對(duì)不同距離的物體成像時(shí),需要機(jī)械移動(dòng)會(huì)造成圖像放大率變化,導(dǎo)致深度測(cè)量產(chǎn)生誤差。近年來(lái),電控調(diào)焦的液晶透鏡光學(xué)成像系統(tǒng)已實(shí)現(xiàn)對(duì)焦、變焦、深度測(cè)量等功能,利用液晶透鏡光學(xué)成像系統(tǒng)進(jìn)行雙目立體視覺(jué)深度測(cè)量可以擴(kuò)張雙目深度測(cè)量范圍。
2022-06-14 13:43:182266 總結(jié)一下,我們現(xiàn)在認(rèn)識(shí)了三種制造立體視覺(jué)的方法,分別是視覺(jué)陷阱、全息投影和產(chǎn)生視差。 雙目立體視覺(jué)這一有著廣闊應(yīng)用前景的學(xué)科,隨著光學(xué),電子學(xué)以及計(jì)算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸實(shí)用化,不僅將成
2022-10-31 15:20:412052 簡(jiǎn)單來(lái)說(shuō),基于雙目立體視覺(jué)的測(cè)距類(lèi)似人類(lèi)的雙眼,和基于TOF、結(jié)構(gòu)光原理的測(cè)距不同,它不對(duì)外主動(dòng)投射光源,完全依靠拍攝的兩張圖片( RGB 或者灰度圖)來(lái)計(jì)算距離。
2022-11-18 14:21:284207 由于兩個(gè)鏡頭共用一個(gè)設(shè)備ID,打開(kāi)攝像頭時(shí)使用cv2.VideoCapture()函數(shù),只需打開(kāi)一次。區(qū)別有的雙目攝像頭是左右鏡頭各用一個(gè)設(shè)備ID,需要打開(kāi)兩次cv2.VideoCapture(0),cv2.VideoCapture(1)。
2023-06-01 14:54:24481 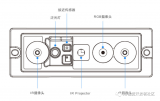
采用立體視覺(jué),不需要紅外傳感器、聲波定位儀、激光雷達(dá)等測(cè)距傳感器,可大大降低了技術(shù)解決方案的成本。
2023-07-19 12:41:18428 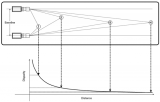
立體視覺(jué)技術(shù)是機(jī)器人技術(shù)研究中最為活躍的一個(gè)分支,是智能機(jī)器人的重要標(biāo)志。雙目立體視覺(jué)是通過(guò)對(duì)同一目標(biāo)的兩幅圖像提取、識(shí)別、匹配和解釋?zhuān)M(jìn)行三維環(huán)境信息的重建。其過(guò)程主要包括視頻捕獲、攝像機(jī)定標(biāo)
2023-07-19 14:18:240 雙目更多的是基于物理測(cè)量,而單目視覺(jué)則是基于邏輯推理,通過(guò)大量的數(shù)據(jù)訓(xùn)練,先識(shí)別出目標(biāo),再根據(jù)目標(biāo)的大小和高度估算距離。因此,單目視覺(jué)的漏檢率高于雙目立體視覺(jué),因?yàn)榭陀^(guān)上存在corner case。
2023-08-17 09:40:062169 
雙目立體視覺(jué)一直是機(jī)器視覺(jué)研究領(lǐng)域的發(fā)展熱點(diǎn)和難點(diǎn),“熱”是因?yàn)?b class="flag-6" style="color: red">雙目立體視覺(jué)有著及其廣闊的應(yīng)用前景,且隨著光學(xué)、計(jì)算機(jī)科學(xué)等學(xué)科的不斷發(fā)展
2023-08-25 17:28:331278 
的距離傳感解決方案,盡管性能存在顯著差異,特別是在惡劣的天氣和道路條件下。 Nodar是AV先進(jìn)立體視覺(jué)技術(shù)的提供商,最近進(jìn)行了一系列面對(duì)面的性能測(cè)試,以比較 LiDAR 和立體視覺(jué)攝像頭如何處理低光,黑暗和惡劣天氣條件,以及檢測(cè)道路上的
2023-10-13 15:33:25230 全志V853開(kāi)發(fā)板雙目攝像頭模組原理圖20220624
2022-10-19 15:11:2822 兩種高效的距離傳感解決方案,盡管性能存在顯著差異,尤其是在惡劣天氣和道路條件下。 Nodar是一家為自動(dòng)駕駛汽車(chē)提供先進(jìn)立體視覺(jué)技術(shù)的供應(yīng)商,最近進(jìn)行了一系列頭對(duì)頭的性能測(cè)試,以比較LiDAR和立體視覺(jué)攝像頭如何處理弱光、黑暗和惡劣的天氣條件
2023-11-07 17:01:58658
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論