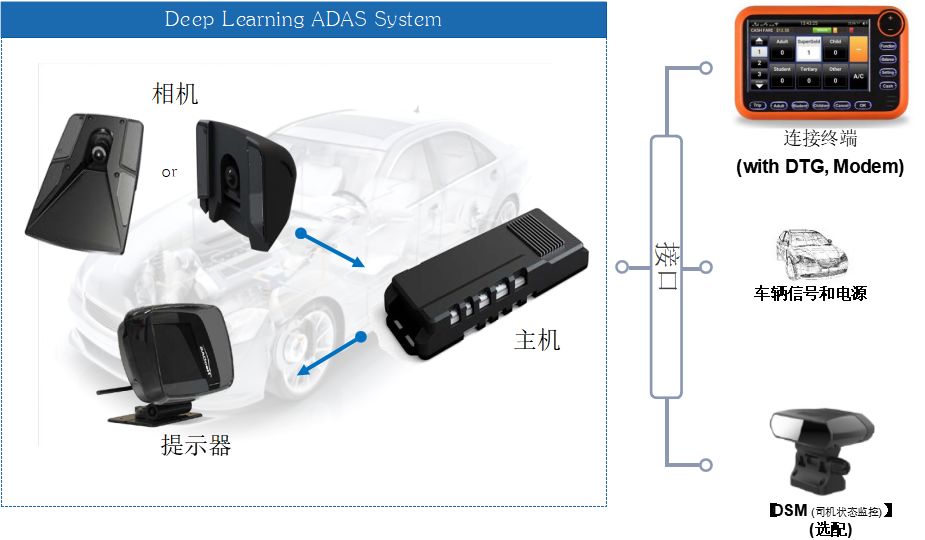
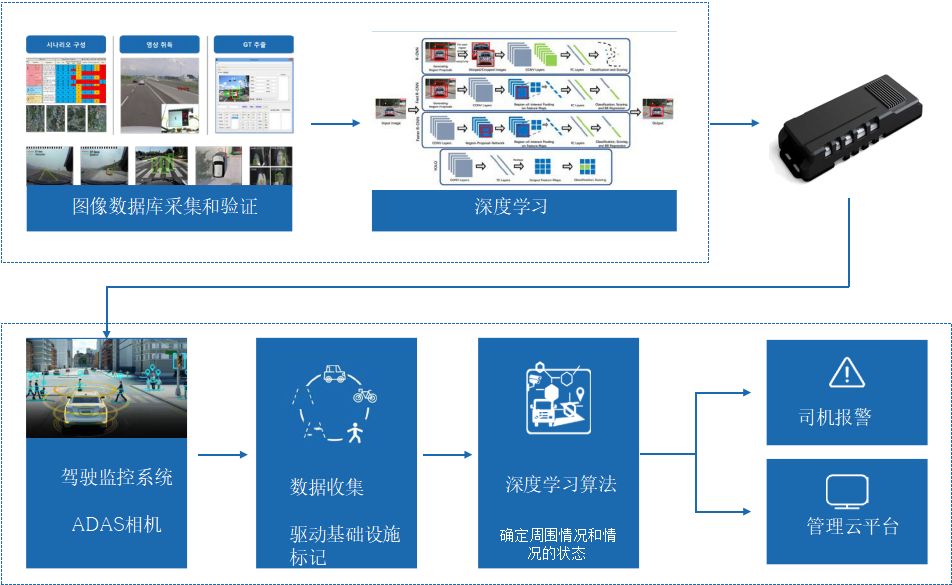
") 深度學(xué)習(xí)ADAS系統(tǒng)的方法和步驟
深度學(xué)習(xí)ADAS系統(tǒng)的方法和步驟
隨著汽車工業(yè)的迅猛發(fā)展、汽車保有量的增加及駕駛員非職業(yè)程度越來越髙,由汽車運(yùn)輸所造成的交通事故、人員傷亡也越來越多。為了降低交通事故的發(fā)生,近年來各大汽車公司和科研單位開始研發(fā)汽車主動(dòng)安全控制技術(shù),并逐漸在實(shí)車上應(yīng)用。汽車主動(dòng)安全控制技術(shù)的主要控制目標(biāo)在于調(diào)節(jié)輪胎與路面之間的作用力,而這種作用力受路面附著條件的制約。路面狀況不僅影響汽車的加速性能、制動(dòng)性能,還影響汽車的操縱穩(wěn)定性,因此如何識(shí)別汽車與路面間附著狀況是汽車各種主動(dòng)安全電控系統(tǒng)控制策略的關(guān)鍵問題。為使汽車主動(dòng)安全電控系統(tǒng)能在不同路面上充分利用各種路面最大的附著條件,需對(duì)汽車行駛的當(dāng)前路面狀況進(jìn)行識(shí)別并依據(jù)識(shí)別結(jié)果實(shí)時(shí)調(diào)整控制器控制目標(biāo)
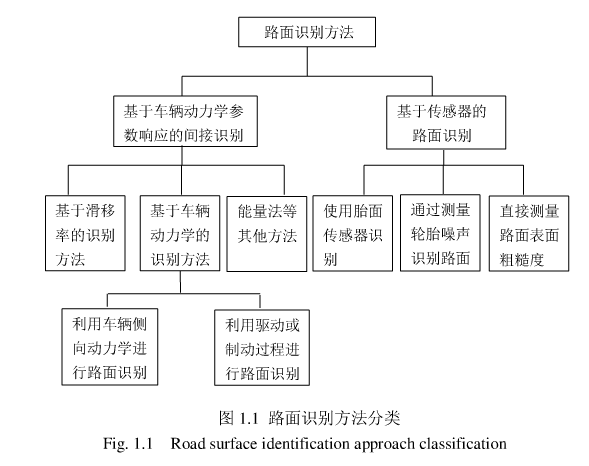
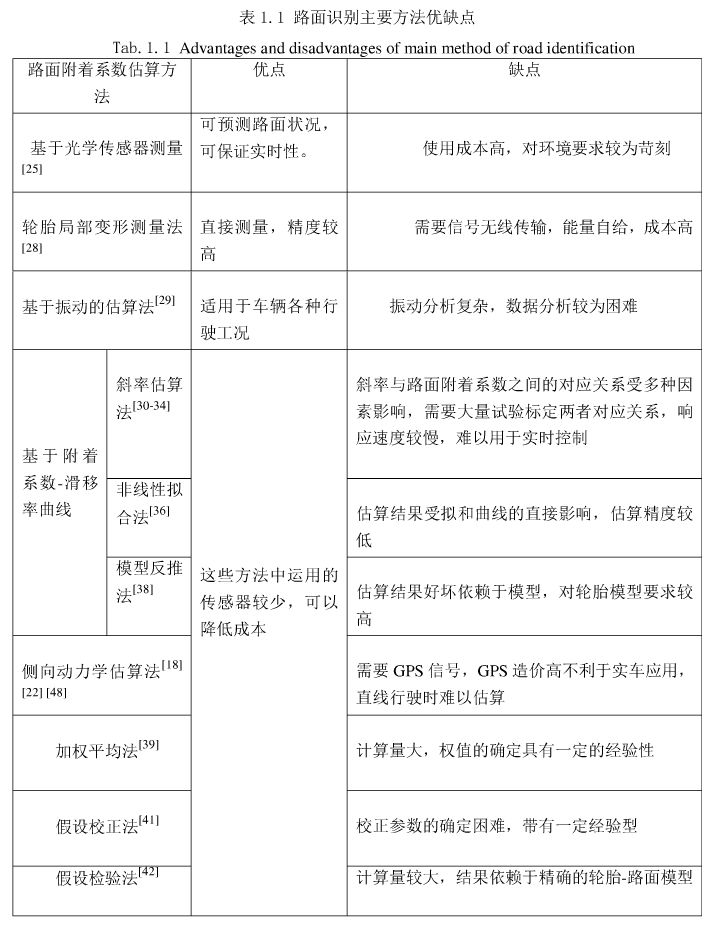
國(guó)內(nèi)外關(guān)于路面狀況識(shí)別大多在平直路面上展開,沒有考慮不平路面上路面不平度對(duì)識(shí)別參數(shù)的影響。本文路面識(shí)別算法考慮了路面不平度、動(dòng)載荷等對(duì)路面參數(shù)、識(shí)別方法的影響,在 Burckhardt和 Kiencke兩種輪胎模型的基礎(chǔ)上,將實(shí)際汽車行駛路面劃分為6種類型,提出了一種基于“路面狀態(tài)無量綱特征值”的路面識(shí)別方法,得到burckhardt和 Kiencke兩種輪胎-路面數(shù)學(xué)模型6種典型路面特征值門限值(制動(dòng)力系數(shù)一滑移率曲線最佳滑移率前的封閉面積),并依據(jù)特征值門限均值定義了6種典型路面的特征區(qū)間。根據(jù)汽車制動(dòng)過程中估計(jì)的實(shí)時(shí)路面狀態(tài)特征值落入的路面特征區(qū)間作為當(dāng)前識(shí)別的路面狀態(tài),并根據(jù)此方法實(shí)時(shí)估計(jì)了當(dāng)前路面狀況下的峰值附著系數(shù)和最佳滑移率。為了考慮路面不平度對(duì)識(shí)別算法的影響,在14自由度整車仿真平臺(tái)上修正了C級(jí)路面上路面特征區(qū)間的范圍,提高了識(shí)別算法在不平路面上的魯棒性。
建立了含車身縱向、橫向、垂向、橫擺、俯仰、側(cè)傾運(yùn)動(dòng),四個(gè)車輪垂向和轉(zhuǎn)動(dòng)的汽車14自由度動(dòng)力學(xué)模型,在 MATLAB/ Simulink軟件環(huán)境下建立整車仿真平臺(tái)。在各種單一典型路面和對(duì)接變化路面、不平路面上進(jìn)行制動(dòng)模擬試驗(yàn),得到了各種典型路面上路面無量綱特征值、識(shí)別的路面狀態(tài)、實(shí)時(shí)滑移率、附著系數(shù)等參數(shù)的仿真結(jié)果,結(jié)果表明識(shí)別算法能較快速、準(zhǔn)確地識(shí)別路面狀態(tài)。在實(shí)驗(yàn)室自制的汽車防抱制動(dòng)系統(tǒng)試驗(yàn)臺(tái)上的一次制動(dòng)試驗(yàn)數(shù)據(jù)進(jìn)一步驗(yàn)證了識(shí)別算法的可行性。
硏究結(jié)果表明,所提出的路面識(shí)別方法能夠便捷地用于汽車電控制動(dòng)系統(tǒng)最佳滑移率控制及主動(dòng)安全控制系統(tǒng)中,提高汽車的主動(dòng)安全性。但面向聯(lián)合工況下的路面狀態(tài)識(shí)別及如何提高識(shí)別算法在實(shí)際控制器中的可靠性仍是一大難題。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752141 -
智能汽車
+關(guān)注
關(guān)注
30文章
2789瀏覽量
107161 -
ADAS系統(tǒng)
+關(guān)注
關(guān)注
4文章
226瀏覽量
25681
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
深度學(xué)習(xí)在汽車中的應(yīng)用
通過深度學(xué)習(xí)提高ADAS系統(tǒng)的檢測(cè)速度
基于深度學(xué)習(xí)的異常檢測(cè)的研究方法
基于深度學(xué)習(xí)的異常檢測(cè)的研究方法
深度學(xué)習(xí)介紹
什么是深度學(xué)習(xí)?使用FPGA進(jìn)行深度學(xué)習(xí)的好處?
ADAS 市場(chǎng)崛起,這家公司一已將深度學(xué)習(xí)網(wǎng)絡(luò)應(yīng)用到 ADAS 系統(tǒng)中
ADAS要如何運(yùn)用深度學(xué)習(xí)?
基于深度學(xué)習(xí)的ADAS系統(tǒng),是GPU的主力市場(chǎng)

深度學(xué)習(xí)框架和深度學(xué)習(xí)算法教程
深度學(xué)習(xí)的模型優(yōu)化與調(diào)試方法
深度學(xué)習(xí)中的時(shí)間序列分類方法
Pytorch深度學(xué)習(xí)訓(xùn)練的方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論