 利用GD32F130系列MCU設計冰箱壓縮機變頻板方案的介紹和應用分析
利用GD32F130系列MCU設計冰箱壓縮機變頻板方案的介紹和應用分析
本文介紹的變頻板可用于冰箱壓縮機變頻控制,同時也可用于油煙機,空調內風機的變頻控制。方案基于兆易創新GigaDevice的GD32F130系列MCU設計,MCU配備Cortex-M3內核,可軟件實現PI控制,SVPWM生成器,電機狀態觀測器;一個高級定時器可直接產生6路互補死區可調PWM, 芯片滿足工業級的工作溫度和ESD, EMI標準,非常適合于PMSM, BLDC的變頻調速控制。
GD32F130系列MCU主要規格
Cortex-M3@48Mhz, 50 MIPS的處理性能;
Flash:64KB/32KB/16KB;
SRAM:8KB/4KB/4KB;
高速高精度ADC, 12Bits ADC x1@2.6Msps,10通道;
高級定時器x1,可產生6路死區可調的互補PWM輸出。通用定時器x6;
Flash帶硬件加密保護;
多種串行通訊方式:I2C x2, SPI x2, UART x2;
豐富的封裝類型:TSSOP20/ QFN28/ QFN32/ LQFP32/ LQFP48/LQFP64
工業級的工作溫度范圍:-40℃~+85℃;
工業級的ESD特性:6000 Volt;
變頻板主要規格參數
額定輸出功率200W,310V母線電壓,最大工作電流2A;
磁場定向法,正弦波電流,無傳感器啟動及控制;
逆變電路由6個Power MOSFET搭建成;
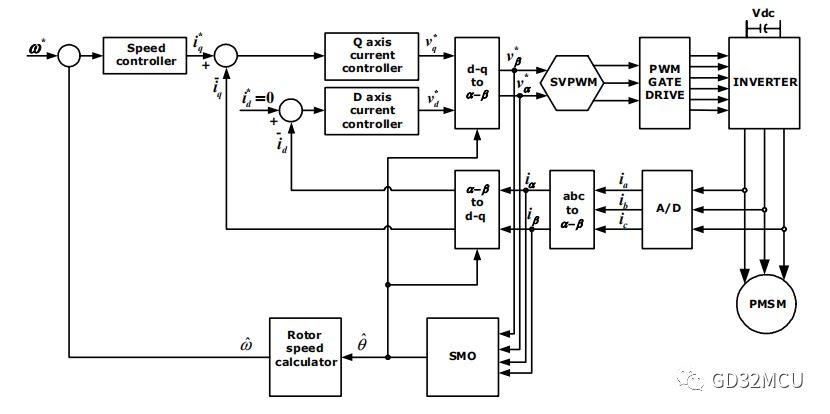
電機控制系統控制框圖如下:
MTPA的實現
如系統框圖所示,整個系統為雙閉環控制,內環為電流控制環路,外環為速度控制環路。設定轉子磁通方向為d-axis,q-axis是d-axis的正交軸向,電流環路的控制目的是為了將定子的電流和磁通解耦,將定子的電流都控制到q-axis上。
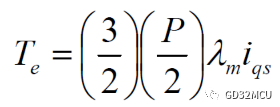
針對于SPM電機,我們將d-axis的目標控制量id設為0,將定子上的電流全部控制到q-axis上,從而獲得Maximum Torque Per Ampere(MTPA)。此時,PMSM電機的轉矩和轉速只與q-axis的電流分量有關,我們再通過速度控制環路來控制d-axis上的電流,實現雙閉環控制。
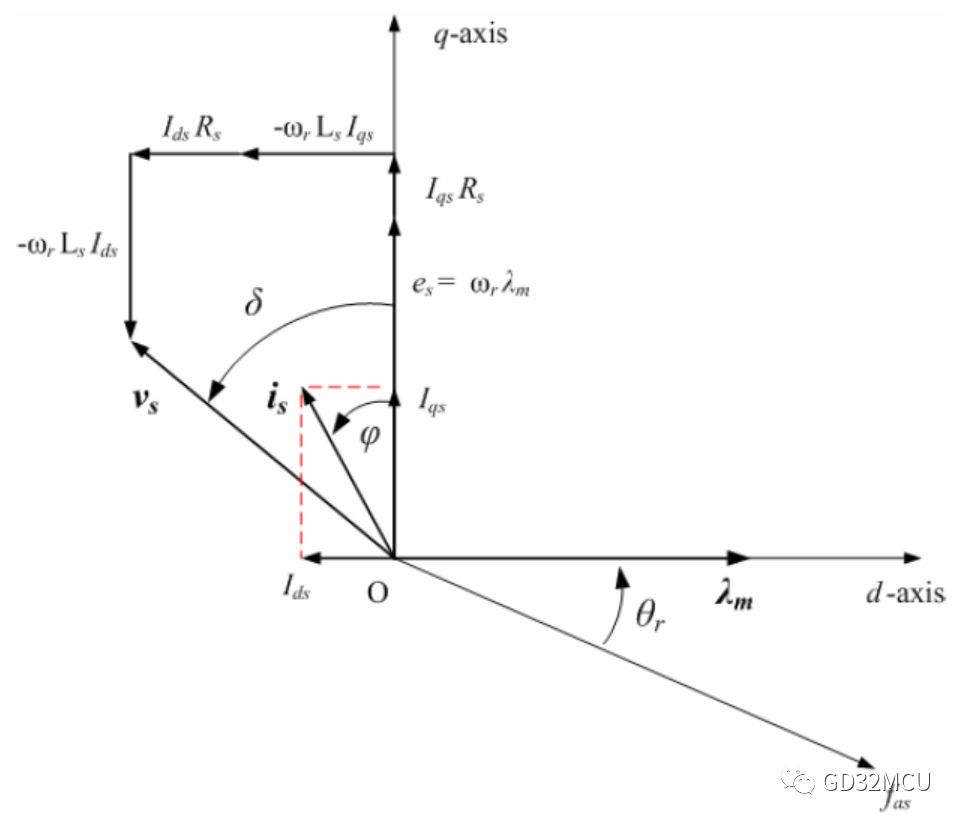
在實際的工作中,由于SPM電機的結構并不是理想情況,d-axis上的實際電流也并不為0;同時,我們也會有目的的去控制d-axis上的電流,從而實現電機超出基速運轉;此時,我們需要在d-axis上面加上弱磁控制器,從而確保MTPA的實現。SPM電機運轉時的矢量圖如下:
FOC的實現
PMSM電機實際接線時有a,b,c三相電流,我們現在需要把a,b,c三相電流與D axis電流和Q axis電流聯系起來,需要用到Clark 和Park 這2個數學變換:
Clark變換:(a,b,c)→(α,β),α,β為兩相正交靜止的坐標系;
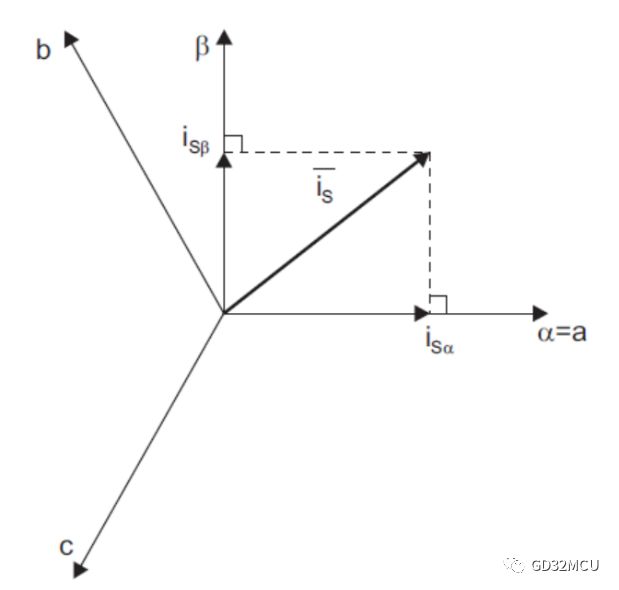
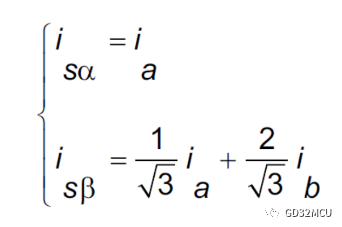
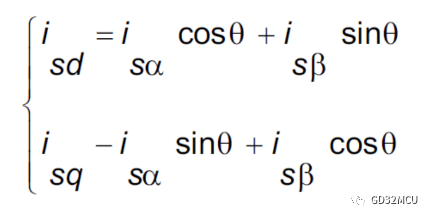
Park變換:(α,β)→(D,Q),D,Q為兩相正交旋轉坐標系,其中θ是轉子磁通位置;
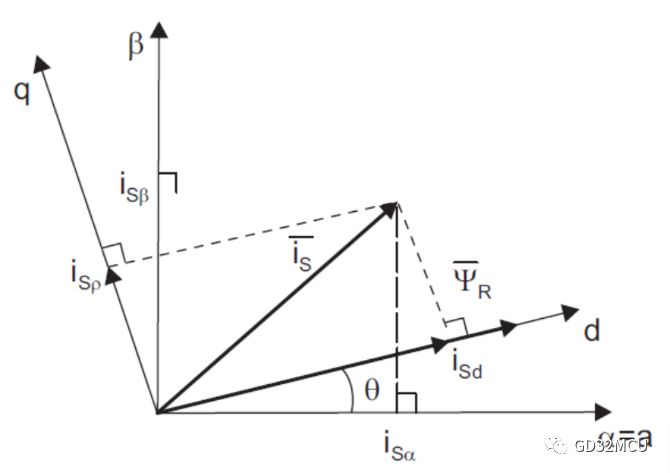
通過Clark和Park兩個數學變化,我們可以將PMSM電機的a,b,c三相電流分解到D axis和Q axis上來,從而實現磁場定向控制(FOC)。我們還可以發現,整個FOC控制的關鍵點在于找到轉子的磁通位置θ。
SVPWM的實現
我們利用反Park變換也可以將定子的電流從D,Q空間轉換到α,β空間下,完成了磁場定向后,PMSM電機控制的最后一步就是要產生作用在電機三相端子上的PWM電壓。根據三相逆變器的8種開關狀態,我們可以列出空間矢量調制逆變器狀態表:
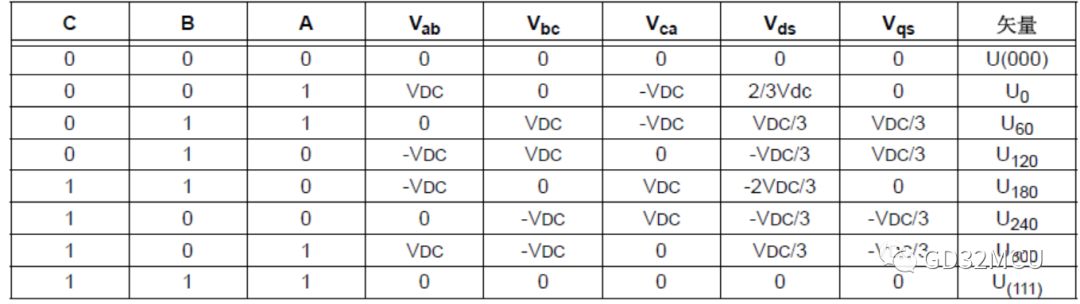
其中A,B,C三相都為0和1時為無效狀態,我們將這兩個狀態矢量放置在空間的原點,其余6個矢量狀態U0→U300剛好在空間繪成一個正6邊形。傳統的6步法控制電機就是將這6個電壓向量依次加在電機的定子端。
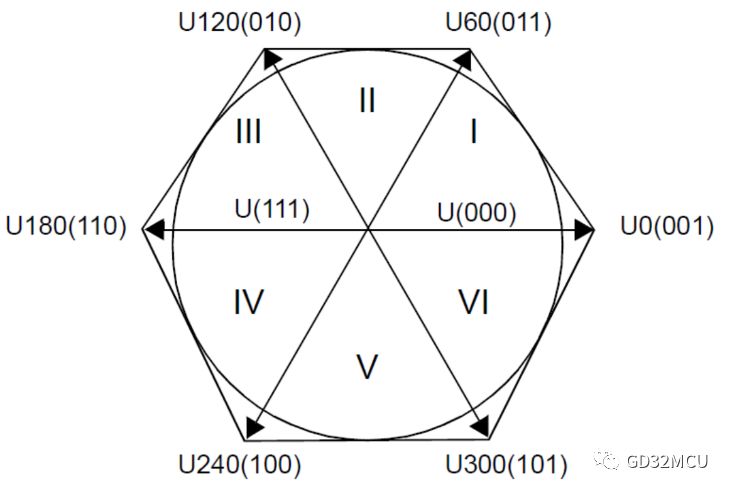
空間矢量調制(SVPWM)的目的是在矢量空間內形成一個360度等幅旋轉的電壓矢量,從而減少逆變器輸出的電流諧波成分,降低轉矩脈動。SVPWM的實現方法,則是利用相鄰的兩個基本電壓矢量來合成矢量空間中的旋轉電壓矢量Uout,Uout的最大值約為0.886*VDC。舉第一象限為例,
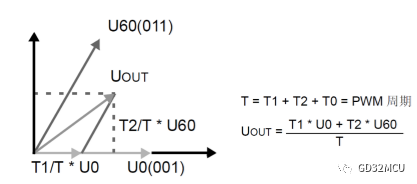
其中,T1為電壓矢量U0在一個PWM周期內的作用時間,T2為電壓矢量U60在一個PWM周期內的作用時間,T0為零序分量的作用時間。
我們先利用V_α和V_β的值確定扇區sector,再根據三角函數和Vdc的值計算出T1,T2和T0的值。
A= V_β;
B= 1.7320508*V_α-V_β;
C= -1.7320508*V_α-V_β;
if(A>= 0) {a= 1;} else a= 0;
if(B>= 0) {b= 1;} else b= 0;
if(C>= 0) {c= 1;} else c= 0;
N=a+2*b+4*c;
switch(N)
{
case 1: sector = 2; break;
case 2: sector = 6; break;
case 3: sector = 1; break;
case 4: sector = 4; break;
case 5: sector = 3; break;
case 6: sector = 5; break;
default: break;
}
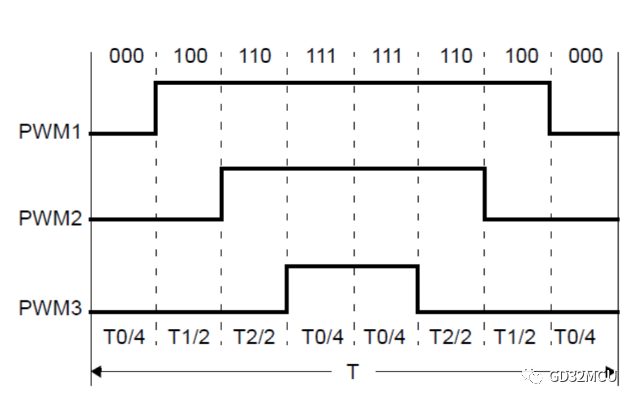
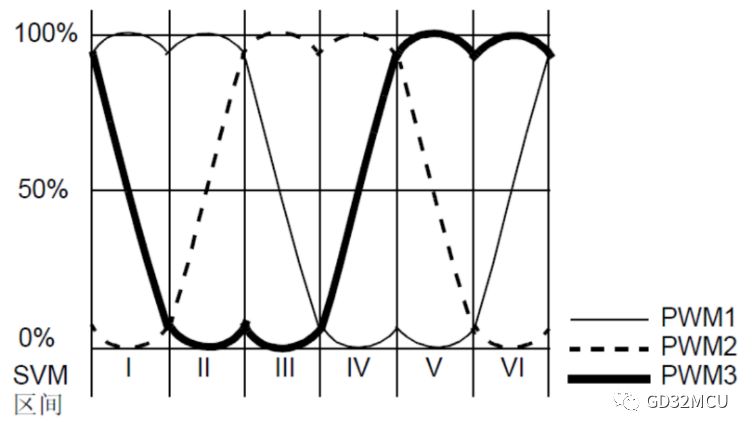
為了減少逆變器電路中MOSFET的開關次數,可以使用7段空間矢量合成方式,在每個矢量扇區內均以零矢量(000)開始和結束,中間用零矢量(111),其余時間用有效矢量。如下圖所示:
SVPWM電壓加在PMSM電機的三相端子上后,可以看到馬鞍形的相電壓波形,如下圖所示:
轉子角度觀測器的實現
找到轉子磁通的位置θ是FOC算法的關鍵,但在電機高速轉動的過程中,Hall傳感器的精度不夠導致無法精確找到轉子的磁通位置θ,此時需要用到轉子角度觀測器。轉子磁通的角度信息,可以從反電動勢中獲取到,我們無法直接測量到電機的反電動勢,但是可以用觀測器的方法,計算出反電動勢的值。
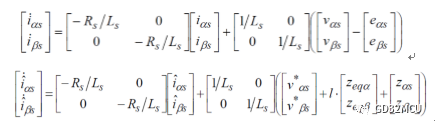
選觀測器電流與真實電流的誤差值為滑模控制面S,
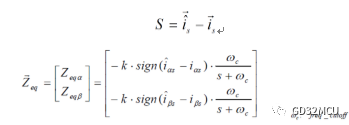
如果滑模增益K足夠大的情況下,我們可以找到一個滑模控制面S,使得
滑模觀測器的系統框圖如下:
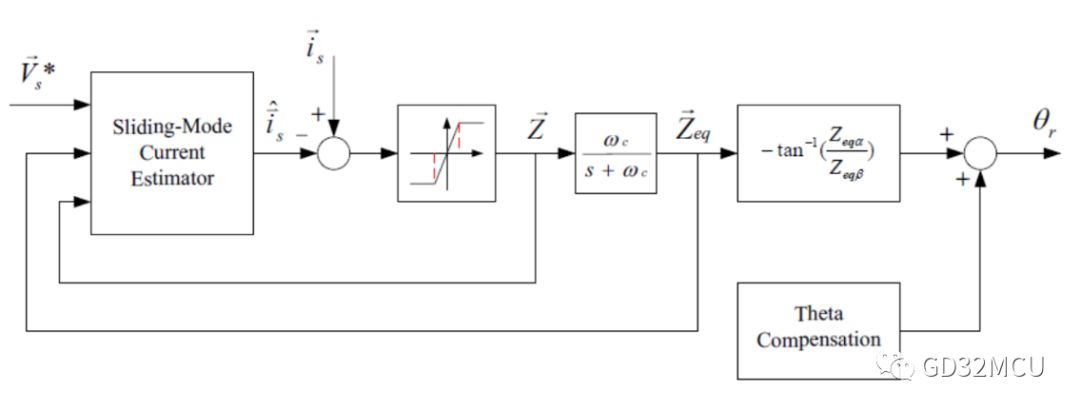
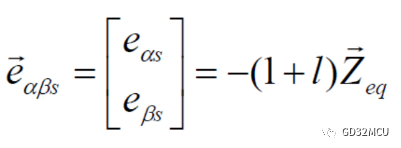
如果要確保滑模控制面S的穩定,我們需要選取有效的K和l值,保證
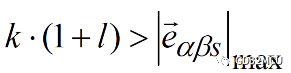
并且l值必須大于-1。最后轉子的角度θ便可以通過反正切函數計算出來。
GD32F130系列MCU可以輕松實現上述的SVPWM產生器,Park/Clark變換,PI控制器,以及轉子位置觀測器。MCU內置的高速高精度SAR ADC和多級中斷系統可以確保閉環控制的實時性。
GD32F130冰箱變頻板
正面圖片
反面圖片
-
控制器
+關注
關注
112文章
16212瀏覽量
177448 -
逆變器
+關注
關注
283文章
4693瀏覽量
206334 -
觀測器
+關注
關注
0文章
49瀏覽量
10187
發布評論請先 登錄
相關推薦
【GD32 MCU 移植教程】9、從 STM32F10x 系列移植到 GD32F30x 系列
【GD32 MCU 移植教程】8、從 STM32F4xx 系列移植到 GD32F4xx 系
【GD32 MCU 移植教程】5、GD32E230 系列移植到 GD32F330 系列
【GD32 MCU 移植教程】2、從 GD32F303 移植到 GD32F503
冰箱壓縮機控制方案介紹

離心壓縮機的工作原理是什么
壓縮機的類型和區別
螺桿式制冷壓縮機工作原理 離心式壓縮機和螺桿式壓縮機區別

GD32F系列MCU片上Flash中Code區和Data區使用解密





 工商網監
工商網監
評論