") Dexmo力反饋手套的創(chuàng)造史,以及力反饋交互的原理、常見誤區(qū),以及應(yīng)用場景
Dexmo力反饋手套的創(chuàng)造史,以及力反饋交互的原理、常見誤區(qū),以及應(yīng)用場景
交互是VR、AR體驗(yàn)中極其重要的部分,它直接決定沉浸感的程度。至今為止大大小小的公司在五感的還原上不斷探索,視覺和聽覺已經(jīng)較為成熟,而觸覺、嗅覺、味覺仍在初步探索階段。
谷逍馳(Aler Gu),Dexta Robotics(岱仕科技)CEO, 自2014年起,其致力于開拓現(xiàn)代VR/MR的交互技術(shù),并研發(fā)出了力反饋手套Dexmo,目前已經(jīng)應(yīng)用于虛擬仿真、工業(yè)等領(lǐng)域。
谷逍馳是Dexmo力反饋手套的主創(chuàng)者,也是一位狂熱的全棧機(jī)器人科學(xué)家、人機(jī)交互研究者,他曾就讀于劍橋大學(xué)機(jī)械控制工程專業(yè)。本文中,他將分享Dexmo力反饋手套的創(chuàng)造史,以及力反饋交互的原理、常見誤區(qū),以及應(yīng)用場景等。
以下為第一人稱自述 :
Hi,我是DextaRobotics的CEO,AlerGu(谷逍馳)。自2014年以來,我們一直在探索VR/MR中的人機(jī)交互方式,致力于尋找適用于所有人的最自然直覺的解決方案。我們一直在努力讓力反饋手套成為現(xiàn)實(shí)。
Dexmo讓人們在VR中獲得最自然直覺的交互體驗(yàn)
(以上為參考圖,實(shí)際使用中需搭配6自由度空間定位器)
由于部分讀者尚不了解我們的產(chǎn)品,我先向大家介紹一下:Dexmo是一款商業(yè)化便攜式雙手無線力反饋手套,兼具手部動(dòng)作捕捉與力反饋功能,可廣泛應(yīng)用于工業(yè)培訓(xùn)、教育科研、醫(yī)療康復(fù)、游戲社交、仿真建模、汽車、航空航天等領(lǐng)域。Dexmo是最易于使用的力反饋手套,為研究者、企業(yè)、消費(fèi)者而生。它所提供的自然、直覺的觸感可以讓每一個(gè)人無縫觸碰真正沉浸式的VR世界。
現(xiàn)在四處常見各種精美的技術(shù)概念演示。與它們相比,Dexmo的特別之處在于它的完成度遠(yuǎn)遠(yuǎn)高于一個(gè)概念。它不僅僅是可以工作的原型機(jī),而是體驗(yàn)優(yōu)秀,并已經(jīng)投入大批量生產(chǎn)的產(chǎn)品。我們正在將這項(xiàng)技術(shù)進(jìn)一步推向大眾。
在介紹產(chǎn)品細(xì)節(jié)之前,我想先給大家分享我的一些想法,包括我們?yōu)槭裁匆鲞@件事、交互在VR中的重要性、我們前進(jìn)的動(dòng)力,以及產(chǎn)品的最新進(jìn)展。
Dexmo力反饋手套的產(chǎn)品宣傳圖
項(xiàng)目的開端
在2013年我第一次看到OculusRift的時(shí)候,我為它的概念感到振奮不已,見到它的發(fā)展,我開始意識到這遠(yuǎn)不僅僅是個(gè)游戲配件,而是朝著未來媒介新篇章邁出的第一步。我們回顧信息傳播媒介的發(fā)展歷史:從寫信開始,到傳送照片、印刷報(bào)紙,再到聽廣播、看電視、使用個(gè)人電腦、智能手機(jī),人類已經(jīng)走過一段漫長的道路。在歷史的演進(jìn)中,技術(shù)的進(jìn)步令我們能夠以不斷增長的信息密度進(jìn)行溝通。人類持續(xù)全力發(fā)展技術(shù),創(chuàng)造盡可能還原我們現(xiàn)實(shí)生活中交互方式的體驗(yàn)。
但是現(xiàn)今的技術(shù)能夠讓遠(yuǎn)距離溝通變得跟面對面交流一樣嗎?答案是不能。他們并不能看到彼此的肢體動(dòng)作,也不能親手拿起東西遞給對方,這里還有很多需要改進(jìn)的地方。每當(dāng)一項(xiàng)逐漸完善的技術(shù)媒介成熟時(shí),就將徹底改變幾代人的生活。將一切由2D轉(zhuǎn)換為3D的VR/MR技術(shù)是我們必將迎來的合理發(fā)展,但它究竟將以何種形式落地呢?
很多人致力于研發(fā)頭顯,但要想獲得完全沉浸式的體驗(yàn),只有優(yōu)秀的頭顯是不夠的,還有一些同樣重要的問題需要解決。我們都見過那種傻乎乎的圖片:有人帶著頭顯,雙手在面前比劃,但其實(shí)根本這雙手根本沒有被帶進(jìn)VR里。我意識到這里明顯有所缺失,那就是手部設(shè)備,手是我們思想的延伸,能夠使最自然的人類互動(dòng)成為可能。
這才是在VR中使用雙手時(shí)該有的樣子
不僅僅是我自己,很多VR愛好者曾告訴我,他們不僅想在VR中使用自己的手,還想感受自己所抓住的物體,可惜這樣的技術(shù)當(dāng)時(shí)并不存在。當(dāng)時(shí)最接近這樣需求的產(chǎn)品大多要通過電纜連接遠(yuǎn)在另一端的電機(jī)箱,它們體積龐大又過時(shí),難以制造和維護(hù),而且對普通消費(fèi)者來說過于復(fù)雜。
我一直對機(jī)器人技術(shù)充滿熱情,我喜歡挑戰(zhàn)。因此,我覺得有責(zé)任用自己對技術(shù)的理解尋找答案:別管過去的數(shù)據(jù)手套,對消費(fèi)者友好的力反饋手套到底應(yīng)該是什么樣子呢?有了這個(gè)想法后,我們從頭開始重新設(shè)計(jì)一切,這就是Dexmo項(xiàng)目的開端。
為何交互很重要
當(dāng)個(gè)人電腦剛被發(fā)明出來的時(shí)候,它只是少數(shù)人使用的酷玩意,當(dāng)時(shí)人們得先知道怎么用命令行才能使用電腦。直到鼠標(biāo)和圖形用戶界面(GUI)被引入系統(tǒng),讓沒有任何技術(shù)背景的人也可以使用PC后,PC才開始進(jìn)入主流市場。假如Win3.0沒有這么友好的用戶界面,很難想象它還能不能賣出400多萬套。
在iPhone問世之前,市場上已經(jīng)有數(shù)十家企業(yè)嘗試推出智能手機(jī),但由于價(jià)格昂貴、使用方法復(fù)雜,所以并未引起廣大普通消費(fèi)者的注意。然而,iPhone憑借其令人驚嘆的觸摸屏和基于觸摸的GUI界面獲得了成功。當(dāng)一個(gè)五歲的孩子不必閱讀使用手冊,只要用手指隨意滑動(dòng)就能開始玩游戲時(shí),你就知道iPhone在降低學(xué)習(xí)成本方面取得了巨大的成功。
VR/MR也面臨著同樣的問題。新的媒體技術(shù)必須真正“易于使用”,才能進(jìn)入大眾市場,但找到最合適的方法并不容易。盡管我很欣賞手柄,但它還不夠簡單和直覺。資深游戲玩家自然都知道如何使用手柄,但如果是新手,則可能需要很長時(shí)間才能習(xí)慣按鍵和搖桿的控制。那我們該怎么解決這個(gè)問題呢?
當(dāng)iPhone問世時(shí),喬布斯有段名言:
“不管你需不需要,它們(市面上的其他智能手機(jī)產(chǎn)品)都會(huì)配置鍵盤,不論你是否真的需要它們。
它們對每個(gè)軟件程序來說都一樣毫無變化,因?yàn)檫@些實(shí)體鍵盤和控制按鍵都被固定在塑料上了,。但其實(shí)每個(gè)應(yīng)用都需要一點(diǎn)獨(dú)特的用戶界面,針對不同應(yīng)用,需要對鍵盤進(jìn)行一些針對性優(yōu)化改變。 但是如果六個(gè)月后你想出一個(gè)好主意想添加進(jìn)產(chǎn)品里,你不能再繼續(xù)加一個(gè)按鍵了,因?yàn)楫a(chǎn)品都已經(jīng)發(fā)貨了。
那該怎么辦?
無解,因?yàn)榘存I和控制系統(tǒng)不能調(diào)整了,它不能為每一個(gè)應(yīng)用程序而改變,他未來也不能被再加入整個(gè)系統(tǒng),即便將來你想到另一個(gè)好主意想加入這個(gè)產(chǎn)品。”
VR與其他產(chǎn)品的人機(jī)交互(HCI)發(fā)展對比
我認(rèn)為這與當(dāng)前VR的發(fā)展情況非常相似。手柄有固定的按鍵和搖桿,只能非常有限地部分重建手部交互的體驗(yàn)。開發(fā)者必須根據(jù)特定的手柄硬件來調(diào)整他們的應(yīng)用程序,而不是直接根據(jù)我們使用手的自然習(xí)慣在不同的應(yīng)用程序中構(gòu)建不同的交互方式。用戶必須首先學(xué)習(xí)如何使用硬件才能使用應(yīng)用程序,這就限制了市場的增長,更使得開發(fā)者越來越難以賺錢。
在軟件生態(tài)系統(tǒng)中有一個(gè)眾所周知的悖論,即“先有用戶還是先有開發(fā)者”。在過去的幾年里,我思考了很久,得出了一個(gè)結(jié)論:先有用戶。每當(dāng)一個(gè)新的生態(tài)系統(tǒng)誕生時(shí),如果它不能吸引足夠的用戶,那么從長遠(yuǎn)來看,開發(fā)者就不會(huì)有足夠的動(dòng)力繼續(xù)為這個(gè)平臺開發(fā)。Surface RT就是一個(gè)典型的反面案例,Oculus在早期也是如此。關(guān)鍵在于降低用戶進(jìn)入這個(gè)系統(tǒng)的成本,當(dāng)用戶不需要花費(fèi)學(xué)習(xí)成本就可以加入平臺時(shí),即使只有幾個(gè)應(yīng)用程序,他們也會(huì)加入,因?yàn)閷τ谟脩魜碚f平臺的吸引力大于阻力。和iPhone剛問世時(shí)的情況類似,iPhone的界面和使用非常直觀明了,以至于那些認(rèn)為自己不需要智能手機(jī)的人也開始使用它。簡單的游戲可以幫助開發(fā)者賺取數(shù)百萬美元,這會(huì)鼓勵(lì)更多開發(fā)者加入。這也是VR所需要的生態(tài)系統(tǒng),這就是為什么我堅(jiān)信我們能夠幫助VR行業(yè)形成這樣的生態(tài)系統(tǒng)。
舉個(gè)例子,想象你在現(xiàn)實(shí)生活中打開一張地圖,你會(huì)怎么做?你將從背包里拿出地圖,然后打開來看。這種體驗(yàn)其實(shí)可以通過合適的交互技術(shù)實(shí)現(xiàn),而在當(dāng)前的VR硬件條件下,這就變成了:“按下手柄側(cè)面的抓握鍵打開菜單,然后用另一個(gè)手柄上的光束瞄準(zhǔn)菜單里的地圖選項(xiàng),然后按下扳機(jī)鍵確認(rèn)你的選擇。” 這本該是個(gè)簡單的操作,卻由于目前硬件的限制而變得很復(fù)雜。
其實(shí)從工程學(xué)角度來看,這是有道理的。因?yàn)榇蛟煨阅芊€(wěn)定的手柄要比創(chuàng)造力反饋手套容易得多。請別誤會(huì),我非常欣賞手柄,如果沒有手柄,VR中甚至還不會(huì)有任何引入手部交互的體驗(yàn)。不過我們不能就此止步,雖然困難重重,但是我們應(yīng)該做正確的事,而不是輕松的事。我們必須不斷改進(jìn)我們的技術(shù),直到它變得”傻瓜式的簡單”,因?yàn)橹挥械侥菚r(shí),普通人,而不僅僅限于游戲玩家或是VR愛好者,才會(huì)開始使用VR。這就是我們開發(fā)這個(gè)產(chǎn)品的動(dòng)力。
背景知識普及:
在我深入討論產(chǎn)品之前,我應(yīng)該列出一些背景資料,并指出一些人機(jī)交互領(lǐng)域常見的誤解,以便大家更好的理解。
VR人機(jī)交互的發(fā)展
上圖展示了VR中一些具有代表性的人機(jī)交互(HCI)工具,我不是按發(fā)布日期,而是基于功能來排序的。為了簡單明了起見,我對每個(gè)功能都使用了“勾”和“叉”的簡單標(biāo)注,但這是不足以描述其中細(xì)微的差別的,為了完全理解它們,我會(huì)做進(jìn)一步的解釋。
讓我們從游戲玩家熟悉的普通手柄開始。它有控制按鍵、搖桿和提供反饋的振動(dòng)電機(jī)。然而,它并沒有將手的存在帶入VR,更不用說位置追蹤了。PS4手柄解決了追蹤問題,但仍然受到很多限制。
隨后出現(xiàn)的一個(gè)里程碑是Vive操控手柄,用戶首次可以將雙手位置數(shù)據(jù)分別輸入回VR,并通過扣動(dòng)扳機(jī)鍵來拾取物體。手柄的兩側(cè)各有一個(gè)抓握按鈕,目的是讓人們輕松地“抓握虛擬物體”,但實(shí)際上用戶使用時(shí)并沒有感到特別輕松方便,許多人在松開控制按鈕時(shí)就會(huì)下意識的讓手柄從手中掉落,這讓他們感到困惑和不習(xí)慣。
OculusTouch手指追蹤展示
(這個(gè)演示主要集中于展示手指追蹤,基于按鈕的交互沒有在GIF中展示出來)
Oculus Touch提供了Vive手柄所提供的大部分功能之外,還提供了更好的人體工學(xué)改進(jìn),以及簡單的部分手指追蹤功能:拇指和食指開關(guān)式追蹤(只有張開和握緊)。它無法模擬(連續(xù)的)手指彎曲的精確追蹤,而且只作用于兩根手指。另外的三指彎曲檢測是通過一個(gè)抓握按鈕來實(shí)現(xiàn)的。它讓用戶更進(jìn)一步地感受到了虛擬世界中手部的存在,但它仍然受到許多方面的限制。
Knuckles手指追蹤展示
Valve公司的Knuckles(現(xiàn)在叫做Index控制器)在Touch所提供功能的基礎(chǔ)上,進(jìn)一步改進(jìn)了手部追蹤功能。它在手柄上安裝了一組額外的傳感器,以實(shí)現(xiàn)全手五指跟蹤,并開發(fā)了一種非常創(chuàng)新的人體工程學(xué)穿戴方式,讓用戶可以完全張開手而不會(huì)掉落手柄,它是目前最完善的操控手柄。盡管如此,它的手指跟蹤仍然很受限制(只有不到30度的連續(xù)彎曲檢測,對于超過30度的手指彎曲幅度只能檢測為張開或握緊),并且只有有限的五個(gè)自由度:每根手指一個(gè)自由度,這意味著你不能將大拇指的旋轉(zhuǎn)自由度和四根手指的展開自由度輸入到VR中。
而Leap motion和其它一些基于視覺的手部追蹤解決方案則屬于不同的技術(shù)路徑。它們提供真實(shí)手部尺寸大小的全手追蹤與連續(xù)的手指彎曲追蹤,但可以理解的是,它不提供任何反饋方案,甚至連基于振動(dòng)的觸覺反饋也沒有。盡管它擁有較高的精度和自由度(尤其是手指的展開的自由度和拇指的靈活度),但跟蹤的可靠性仍成問題。由于它基于視覺的解決方案,如果手到相機(jī)的光路被遮擋,它會(huì)立即丟失跟蹤數(shù)據(jù)。
數(shù)據(jù)手套是另一種精確手部追蹤的技術(shù)路徑。大多數(shù)數(shù)據(jù)手套使用基于彎曲傳感器或基于慣性測量單元(IMU)的解決方案,并根據(jù)使用的傳感器數(shù)量追蹤5 -10自由度的手部運(yùn)動(dòng),使其能夠捕捉連續(xù)的手指彎曲。彎曲傳感器根據(jù)其物理變形來改變電阻,這意味著傳感器的使用壽命有限。而基于IMU的解決方案則使用磁場傳感器、加速度計(jì)和陀螺儀進(jìn)行多傳感器數(shù)據(jù)融合,以重建每根手指的三自由度方向,并使用逆向運(yùn)動(dòng)學(xué)來反算重新生成手部模型。優(yōu)點(diǎn)是傳感器本身不發(fā)生物理變形,因此它不會(huì)有損耗,但由于它是基于慣性的性質(zhì),數(shù)據(jù)的可靠性不高,長時(shí)間使用容易導(dǎo)致“數(shù)據(jù)漂移”,因此需要頻繁地重新校準(zhǔn)。它的可靠性受金屬、磁體和周圍磁場的影響,這就是為什么很難把多個(gè)振動(dòng)電機(jī)放在IMU手套附近。因?yàn)槊慨?dāng)電機(jī)啟動(dòng)時(shí),磁場就會(huì)發(fā)生變化,數(shù)據(jù)的穩(wěn)定性就會(huì)受到影響。而這反映在用戶體驗(yàn)上就是:手部模型會(huì)突然看起來很扭曲奇怪。這種特性限制了數(shù)據(jù)手套的反饋系統(tǒng),這就是為什么我們看到許多IMU數(shù)據(jù)手套只有一個(gè)電機(jī)安裝在手腕上:顯然,這樣的電機(jī)數(shù)量和位置并不是最佳的解決方案。
Dexmo手指追蹤展示
最后是我們的解決方案,這個(gè)機(jī)械外骨骼隨著用戶的手指一起運(yùn)動(dòng),將其運(yùn)動(dòng)傳至內(nèi)置的角度傳感器,并且在每個(gè)指尖產(chǎn)生力反饋。它可以捕獲11自由度的手部運(yùn)動(dòng),從而能夠重建非常真實(shí)的手部模型。力反饋功能在物理上阻止用戶的手穿透虛擬物體,從而讓用戶感受其形狀、大小和剛度。雖然它比其他解決方案體積稍大,但卻是一種非常可靠的捕捉連續(xù)的手手指運(yùn)動(dòng)的方式,也給了我們足夠的空間來放置力反饋裝置。在不犧牲手部靈活性的前提下,我們在商業(yè)化數(shù)據(jù)手套歷史上第一次成功地將力反饋添加到了便攜式手套中。
如果我們回顧手柄的發(fā)展史,它的發(fā)展趨勢是非常明顯的。在VR中手部的交互已經(jīng)變得越來越重要,人們嘗試了不同的方案來解決這個(gè)問題,每個(gè)產(chǎn)品都經(jīng)過了多方面的權(quán)衡。手柄路徑試圖將手指追蹤添加到其硬件中,但由于硬件尺寸和所選擇的追蹤方式,使得追蹤精度和力反饋能力受到限制。這是他們不愿意放棄手柄形式的代價(jià),因?yàn)槭直闹圃斐杀鞠喈?dāng)?shù)停⑶夷壳八呀?jīng)有很大的玩家群體基礎(chǔ)。但如果我們想要使用者突破與現(xiàn)有的玩家群體,就需要做出進(jìn)一步的改變。基于視覺的追蹤不需要用戶穿戴任何東西,這降低了“穿戴成本”,但不穩(wěn)定的追蹤會(huì)立刻打破沉浸感,并且反饋的缺失會(huì)讓用戶很難知道自己在虛擬世界中正在做什么。而數(shù)據(jù)手套則介于以上兩者之間,雖然它有時(shí)會(huì)出現(xiàn)小故障,但它提供了相對可靠的手部追蹤并能夠提供某種形式的反饋。不過相比于輕松地拿起手柄,費(fèi)勁穿戴數(shù)據(jù)手套會(huì)阻礙它的易用性,而且它使用的單點(diǎn)式反饋也沒有給用戶的手部足夠的反饋信息。一個(gè)真正能夠平衡以上各方面問題且易于使用的解決方案還尚待發(fā)掘。
我并不是說Dexmo是人機(jī)交互(HCI)的最佳方案,因?yàn)樗€有很多需要改進(jìn)的地方。可能會(huì)需要溫度、紋理和許多其它反饋以不斷提高沉浸感,但力反饋確實(shí)給VR帶來了難以置信的沉浸感,這無疑是一個(gè)巨大的進(jìn)步。
我想補(bǔ)充的另一點(diǎn)是反饋的添加必須遵循一定的順序。力反饋涉及到電機(jī)的放置和傳動(dòng),因此占用了很大的空間,這會(huì)極大地改變它的整體形態(tài)。首先解決了這個(gè)問題,然后添加其他形式的反饋,要比按照其它順序來做容易得多。這就是為什么我認(rèn)為我們的外骨骼設(shè)計(jì)標(biāo)志著VR人機(jī)交互革命的良好起點(diǎn)。
一些常見的誤解
整體追蹤和局部追蹤:
整體追蹤(定位追蹤)和局部追蹤(手指/手部追蹤)是不同的概念。在文章中當(dāng)我談到手套時(shí),我主要關(guān)注的是它們的局部追蹤能力。手套的定位追蹤可以通過附加現(xiàn)有的追蹤技術(shù)(如Vive追蹤器、OptiTrack標(biāo)記等)來實(shí)現(xiàn),所以我在上面的討論中省略了這一部分。
手指追蹤和手部追蹤:
盡管許多硬件都多少加入了手部感知交互功能,但他們實(shí)現(xiàn)的程度并不相同。這里比較的主要標(biāo)準(zhǔn)是“手指彎曲的連續(xù)性”、“自由度”、“可靠性”和“整體體驗(yàn)”幾個(gè)方面,而不僅僅是被多數(shù)人錯(cuò)誤使用的“精度”。如果人們評價(jià)某個(gè)“精確但不可靠”的解決方案要比某個(gè)”可靠且具有更高的自由度但不那么精確”的解決方案更好,這是不公平的,我們的評判標(biāo)準(zhǔn)不應(yīng)該只有精度。
在VR中,手指能夠連續(xù)動(dòng)作并以任意角度彎曲,與手指只能開關(guān)式地做到展開或彎曲兩種狀態(tài)是不同的。這種差異是由不同的追蹤方法造成的,Touch和Knuckles都使用了接近傳感器對手指進(jìn)行兩種狀態(tài)的檢測,因此它們只能檢測手指的“按壓”和“松開”兩個(gè)狀態(tài),并通過動(dòng)畫對圖形進(jìn)行補(bǔ)償,只能捕捉3或5自由度的手指動(dòng)作。而數(shù)據(jù)手套和基于視覺的解決方案可以在更高的數(shù)值范圍精確檢測手指彎曲,并檢測更高自由度的手部運(yùn)動(dòng)。手柄產(chǎn)生開關(guān)式的數(shù)據(jù),所以它們的可靠性較高;而基于視覺的解決方案雖然有較高的精度,但由于存在因視覺阻擋造成的數(shù)據(jù)跟蹤丟失問題,其整體體驗(yàn)存在爭議。
拇指追蹤本身也很重要。對于大多數(shù)手部追蹤解決方案,其目的只是單純的重建看起來像真手的虛擬手,而不是重建基于真手運(yùn)動(dòng)原理的虛擬手。例如,當(dāng)你用手柄抓取虛擬物體時(shí),虛擬的手會(huì)自動(dòng)合攏呈抓握狀態(tài),然后手柄會(huì)振動(dòng)。足夠逼真的手部模型和動(dòng)畫效果可以達(dá)到障眼法的效果,在不需要將特定的反饋應(yīng)用在各個(gè)手指的時(shí)候,這是可行的。但這不是真實(shí)的力反饋,甚至算不上觸覺反饋。為了讓力或振動(dòng)發(fā)生在適合的位置并輸出適合的大小,手的虛擬重建需要盡可能接近真實(shí)。我們的拇指有3個(gè)自由度,如果我們一開始就忽略拇指數(shù)據(jù),那我們就不可能準(zhǔn)確提供反饋。這就是為什么我們的Dexmo具備捕捉所有拇指動(dòng)作的能力。
觸覺和力反饋:
觸覺這個(gè)詞現(xiàn)在被過于寬泛地使用,以至于產(chǎn)生了一定誤導(dǎo)性。觸覺的原意是“涉及觸覺的任何交互方式”,它涵蓋了很多方面:振動(dòng)、紋理、溫度、力傳導(dǎo)。由于許多游戲手柄都內(nèi)置振動(dòng)電機(jī),然后以“觸覺反饋”的名義進(jìn)行宣傳,許多人便將“觸覺”視為狹義的“振動(dòng)”,這是種常見的誤解。
觸覺其實(shí)有多種形式。為了幫助大家理解,我將以產(chǎn)品為例,主要解釋不同類型的振動(dòng)和力反饋的區(qū)別:
單點(diǎn)振動(dòng):Xbox手柄(手柄兩側(cè)各兩點(diǎn)),操控手柄,部分?jǐn)?shù)據(jù)手套。
多點(diǎn)振動(dòng):VR觸覺反饋背心,其多個(gè)電機(jī)均勻分布在整個(gè)表面。
單點(diǎn)式力反饋:Sensable Phantom力反饋設(shè)備,Novint Falcon 力反饋控制器,它們在一個(gè)點(diǎn)提供6自由度的力反饋。
多點(diǎn)式力反饋:Dexmo,為多個(gè)點(diǎn)提供局部力反饋。
當(dāng)一些數(shù)據(jù)手套被宣傳為“觸覺手套”時(shí),人們往往會(huì)產(chǎn)生錯(cuò)誤的印象:當(dāng)他們戴著手套在VR中觸摸物體時(shí),他們以為可以感覺到物體在指尖或手掌上的觸感。但實(shí)際上,最后他們可能體驗(yàn)到的只是一個(gè)非常令人失望的手腕上的單點(diǎn)震動(dòng),盡管嚴(yán)格意義上這確實(shí)是”觸覺手套“,但跟人們的預(yù)期其實(shí)相差甚遠(yuǎn)。當(dāng)公司在說“觸覺”時(shí)沒有特地注明“力反饋”,它們通常只是振動(dòng)反饋而已。
產(chǎn)品的發(fā)展:
在我開始做這項(xiàng)工作之前,我花了大量的時(shí)間思考如何讓任何人都可以輕松使用Dexmo,結(jié)論是各個(gè)方面都需要降低成本。我所指的不單單是硬件成本,還包括使用它所需的學(xué)習(xí)成本、穿戴成本、硬件制造成本、軟件開發(fā)成本等。這些可以分解為產(chǎn)品的許多不同方面,例如,為了讓人們自然順暢地使用它,產(chǎn)品本身不能太大太重,如果它太重,或者它的大小會(huì)延伸覆蓋到手腕,或者還有連接線把你拖拽住,那它就不是個(gè)對用戶友好的產(chǎn)品,因?yàn)槊看文阋庾R到有連接線在那里拖著的時(shí)候就會(huì)打破VR的沉浸感。這些就是我們需要解決的問題,我們知道了創(chuàng)造這個(gè)產(chǎn)品有大小和重量的限制,以及各種各樣的其他限制,那么我們就必須找出最佳方案。我們牢記著這個(gè)方向和原則,開始了我們的探索與研究。
在2014年我們首次公開亮相,我最初的想法是打造一個(gè)外骨骼,不僅可以捕捉手部運(yùn)動(dòng),還可以在它的指尖提供基于微型制動(dòng)盤結(jié)構(gòu)的開關(guān)式力反饋功能。這個(gè)嘗試成功了,它確實(shí)可行,但還不夠好。最大的缺陷是高延遲和機(jī)械制動(dòng)器導(dǎo)致的不連續(xù)力反饋。所以我們又重頭開始研究。
2016年,我們發(fā)布了新的Dexmo。雖然有著相似的外骨骼外觀,但它實(shí)際上基于完全不同的機(jī)器人技術(shù)架構(gòu),它能夠持續(xù)輸出扭矩,并且延遲控制在50毫秒。這是一個(gè)巨大的改變,它證明了直驅(qū)的力反饋手套的確可以實(shí)現(xiàn)。盡管許多人仍然認(rèn)為它“笨重”,但它表明外骨骼結(jié)構(gòu)是未來力反饋手套的一個(gè)可行方式。
我們不僅僅是在做一個(gè)可用的硬件。我們需要理解和平衡“能夠?qū)崿F(xiàn)”和“應(yīng)該實(shí)現(xiàn)”之間的區(qū)別。例如,我們可以在每只手放置20個(gè)電機(jī)來制作力反饋?zhàn)畋普娴氖痔祝闹亓繉⑦_(dá)到1kg,價(jià)格貴得離譜,而且完全無法穿戴,這違背了我們的初衷。
這是我們過去50多代Dexmo設(shè)計(jì)版本迭代中的一些選集
自2016年,我們的團(tuán)隊(duì)大部分時(shí)間都在號稱“硬件科技的灣區(qū)”的深圳,在這里,有各種各樣比世界上任何地方都更容易獲取的零配件。我們募集了數(shù)千萬的啟動(dòng)資金,接著投入工作,那時(shí)起我們進(jìn)入了“隱身模式”,停止了一切公關(guān)活動(dòng)。因?yàn)槲抑酪屗嬲倪_(dá)到體驗(yàn)良好,我們?nèi)匀挥写罅康墓こ虇栴}亟待解決。相比夸大其詞,告訴大眾這個(gè)產(chǎn)品有多棒,但是大眾卻看不到或試用不了,我更喜歡先著手完成工作,先展示產(chǎn)品再講故事。我一直認(rèn)為過度銷售是一種危險(xiǎn)的策略,不懂適度,反而會(huì)適得其反。
我們讓行業(yè)內(nèi)的專業(yè)人士測試了第一批工程樣機(jī),他們給出了真實(shí)的想法和建議。從我們收集到的反饋來看,他們普遍喜歡我們的產(chǎn)品和使用體驗(yàn),并對我們的努力表示了極大的贊賞。從他們那里聽到他們認(rèn)為這項(xiàng)技術(shù)更先進(jìn),這讓我們更加堅(jiān)定了我們走的道路是正確的。
雖然我們獲得了不錯(cuò)的反饋,但是還有很多需要改進(jìn)的地方。從那時(shí)起,我們開始優(yōu)化每一個(gè)小細(xì)節(jié)來改進(jìn)Dexmo,包括人體工學(xué)、重量、尺寸、結(jié)構(gòu)完整性、電機(jī)控制、無線通訊、制造工藝、交互處理引擎、提供給開發(fā)人員的SDK、項(xiàng)目demo……這里涉及了超過16個(gè)不同的技術(shù)棧,需要軟件、控制、電子和機(jī)械工程師之間的密切合作。這些工作非常復(fù)雜,我們很享受。
在Dexmo的開發(fā)過程中,軟件是一個(gè)關(guān)鍵且極具挑戰(zhàn)性的部分。為了讓人們更容易地使用Dexmo,它不能僅僅以一個(gè)硬件設(shè)備的形式存在,它還需要成為一個(gè)完整的系統(tǒng)。這在我們剛開始的時(shí)候確實(shí)非常矛盾,為一個(gè)尚不存在的硬件構(gòu)建軟件幾乎不可能辦到,但是在我們有了硬件開始開發(fā)軟件之后,又很快就意識到有些改進(jìn)最好直接從硬件上進(jìn)行調(diào)整,而這又會(huì)反過來影響軟件架構(gòu)。每次我們更新系統(tǒng),都要至少花2個(gè)月的時(shí)間。
一個(gè)僅僅可用的SDK和一個(gè)優(yōu)秀好用的SDK是非常不同的。2017年我們出貨了一些早期測試設(shè)備,提供了已被許多人成功應(yīng)用的SDK。然而,我們的客戶仍然遇到了很多問題,最終我們電子郵件來來回回?cái)?shù)百封來解決這些問題。我們低估了新硬件系統(tǒng)對軟件開發(fā)者的困難程度。
Dexmo SDK的步驟說明書
在VR中建立一個(gè)優(yōu)秀的手部-物體交互界面并不容易,因?yàn)檫@個(gè)硬件是前所未有的。因此,我們預(yù)定義了許多交互模塊,并將它們封裝成到示例程序,以幫助開發(fā)人員入門。為了使SDK易于使用,它還必須有優(yōu)秀的文檔,這也需要我們額外的工作。在接下來的一年里,我們?yōu)镾DK制作了循序漸進(jìn)的分步驟開發(fā)指南,即使沒有軟件開發(fā)經(jīng)驗(yàn)的人也能夠按照指南使用SDK。(有件小趣事:我們的一個(gè)SDK測試工程師是機(jī)械工程專業(yè),剛加入我們團(tuán)隊(duì)時(shí),他的編程能力為零,而現(xiàn)在他也可以很輕松地使用SDK。)
最具挑戰(zhàn)性的部分是了解生產(chǎn)流程。不出所料,大規(guī)模地生產(chǎn)如此復(fù)雜和新穎的產(chǎn)品是極其困難的。生產(chǎn)力反饋手套并不像生產(chǎn)頭戴式顯示器,因?yàn)楹笳吒悄苁謾C(jī)的硬件組成很相近,可以參考其生產(chǎn)線設(shè)計(jì)。而沒有現(xiàn)成生產(chǎn)線可供我們參考,甚至沒有人知道什么是“力反饋手套”。因此,我們的工作不得不繼續(xù)下沉到生產(chǎn)環(huán)節(jié)。
我們的力反饋裝置單元的發(fā)展合集
以我們的力反饋單元為例,在過去的幾年里,它經(jīng)歷了幾十次迭代。我們開始使用的舵機(jī)(展示架的最左邊)最初是為遙控車和航模設(shè)計(jì)的,因此它的空間利用率很低,扭矩傳導(dǎo)的結(jié)構(gòu)強(qiáng)度較低。這個(gè)舵機(jī)單元非常寬,所以很難同時(shí)把五個(gè)舵機(jī)安裝在手背上。雖然我們可以做出妥協(xié),把舵機(jī)安置在手腕上,但我知道這不是真正解決問題的辦法。我們需要不惜一切代價(jià)使這個(gè)系統(tǒng)盡可能緊湊簡潔。所以我們決定從零設(shè)計(jì)我們自己的舵機(jī)系統(tǒng),從了解舵機(jī)的必要組成元件和每個(gè)零件的制造過程開始。
舵機(jī)的外殼是由鋁CNC加工而成,這意味著我們可以自定義改變它的幾何形狀。通過在將扭矩輸出軸置中,我們使它變得更薄,同時(shí)使結(jié)構(gòu)更穩(wěn)定。這些齒輪是由滾齒機(jī)加工而成,而滾齒機(jī)可以加工不同的材料,這表明傳動(dòng)設(shè)計(jì)也是可以調(diào)整的。我們試驗(yàn)了不同材料,尋找最高性能重量比的材料,盡可能的在最輕的質(zhì)量下獲得最佳性能。通過換用具有更高計(jì)算能力的芯片集,并放入更多傳感器,我們實(shí)現(xiàn)了更精密的電機(jī)控制。通過改進(jìn)這些細(xì)節(jié),我們開始覺得一切皆有可能。我們一步又一步地深入,最終完全重構(gòu)了力反饋單元。它的最終形態(tài)是專門為力反饋手套設(shè)計(jì)的,緊湊簡潔,顯露出一絲優(yōu)雅。
這個(gè)例子只是冰山一角,系統(tǒng)的每個(gè)部分都經(jīng)歷了像這樣極端坎坷的分析和改進(jìn)。我個(gè)人在工廠住了8個(gè)月,了解生產(chǎn)加工的每一個(gè)細(xì)節(jié)。我們必須不斷平衡工程需求和供應(yīng)商能夠提供的成品,使我們的生產(chǎn)過程平穩(wěn)可靠。畢竟,如果一個(gè)新技術(shù)雖然被開發(fā)出來,但不能被生產(chǎn)和分享,它的意義也很有限不是嗎?
原型與最終產(chǎn)品背后所付出的工作有著巨大差異
對于不熟悉制造過程的人來說,產(chǎn)品原型和最終產(chǎn)成品之間看起來似乎沒太大差別。但事實(shí)上,盡管其外表相似度有90%,但它們隱藏在外觀下所需付出的努力卻可能相差數(shù)百倍。
以下是硬件制造的一些簡單步驟:
產(chǎn)生想法> 想法的驗(yàn)證 > 可運(yùn)作原型> 工業(yè)設(shè)計(jì)>將工業(yè)設(shè)計(jì)與工作原型有機(jī)結(jié)合 > 改進(jìn) > 工程驗(yàn)證 > 進(jìn)一步改進(jìn)>設(shè)計(jì)驗(yàn)證 > 最終可生產(chǎn)設(shè)計(jì)> 前期生產(chǎn)準(zhǔn)備> 零件采購> 供應(yīng)商溝通> 零件質(zhì)檢 > 裝配流程設(shè)計(jì)> 零件裝配 > 質(zhì)檢測試> 產(chǎn)品總裝 > 整體質(zhì)檢測試> 最終待發(fā)貨產(chǎn)品 > 包裝 > 運(yùn)輸
不可避免地,由于各種各樣的隨機(jī)問題,其中一些環(huán)節(jié)可能會(huì)以令人難以置信方式重新反復(fù)數(shù)次,使得這一切更加更難以推進(jìn)。例如,在上次的批量生產(chǎn)流程里,當(dāng)我們以為自己已經(jīng)掌握了每一道細(xì)節(jié)時(shí),一個(gè)供應(yīng)商告訴我們,我們的力反饋單元上有些細(xì)小的零件被不小心遺留在陽極氧化池里,然后溶解了。這件事導(dǎo)致整個(gè)組裝推遲了一個(gè)月。當(dāng)我聽到這個(gè)消息時(shí)我放聲大笑了很久。苦笑。
你們可能會(huì)問:為什么不找像富士康這樣更可靠的供應(yīng)商呢?好問題。創(chuàng)新通常意味著最初時(shí)產(chǎn)品產(chǎn)量較小,而工廠為了追求最大利潤通常只愿意接大批量的訂單。這意味著大工廠不想和我們這樣的小公司合作,因?yàn)閷λ鼈儊碚f訂單小意味著經(jīng)濟(jì)效率低。但我們又必須先小批量銷售,然后才能進(jìn)行大批量生產(chǎn)。很好笑吧?
我們花了數(shù)年的時(shí)間才把它從一個(gè)原型變成“可以準(zhǔn)備發(fā)貨”的產(chǎn)品。我想強(qiáng)調(diào)的是,這不是一項(xiàng)簡單而微不足道的工作。它不是僅僅“設(shè)計(jì)就緒”或“制造就緒”,而是已經(jīng)“發(fā)貨就緒”,這意味著只要有需求,我們就可以成千上萬地生產(chǎn)這個(gè)產(chǎn)品。
我常常看到人們因?yàn)橐粋€(gè)的實(shí)驗(yàn)室里的原型硬件而極度興奮,然后他們就開始期望團(tuán)隊(duì)幾個(gè)月后就能發(fā)貨;或者將我們與一些聲稱產(chǎn)品與我們的同樣好用,但其實(shí)才成立了幾個(gè)月的公司相提并論;每當(dāng)這時(shí)我都會(huì)無奈長嘆。這個(gè)想法很可愛,但是將原型與最終成品進(jìn)行比較是不公平的。任何有Kickstarter硬件項(xiàng)目經(jīng)驗(yàn)的人都知道我在說什么,在Kickstarter上承諾的所謂“四個(gè)月交貨”實(shí)際上意味著需要兩年甚至更長時(shí)間,而通常到了最后,大概率都會(huì)在這些團(tuán)隊(duì)的消失和無數(shù)支持者憤怒的聲討中告終。
在進(jìn)行了所有的這些努力后,這是我們目前取得的成果:
這在商業(yè)化力反饋手套歷史上是第一次:我們將5個(gè)力反饋裝置,11個(gè)動(dòng)作捕捉傳感器,可充電電池,以及整個(gè)控制系統(tǒng)集成在一只不到300克重量的手套中,兼具高便攜性與無線連接,讓用戶在虛擬世界擺脫束縛,自如地運(yùn)動(dòng)雙手,而不打破虛擬世界的沉浸感。
Dexmo能夠捕捉全手11個(gè)自由度的動(dòng)作,包括大拇指的 3個(gè)自由度(旋轉(zhuǎn)、展開和彎曲)和其余四指各2個(gè)自由度(展開和彎曲)。微型力反饋單元可以對用戶的指尖施加可達(dá)10N的力。其優(yōu)秀的拇指跟蹤,有助于精確重建手部模型。用戶可以感受虛擬物體的大小、形狀和剛度,從而大大提升了沉浸感,并獲得更直觀的交互。
我們遵循面向制造設(shè)計(jì)(DFM)原則,如今我們能夠以嚴(yán)格的質(zhì)量控制標(biāo)準(zhǔn)進(jìn)行大規(guī)模生產(chǎn)。我們的SDK已經(jīng)被許多早期客戶測試過,并且經(jīng)過一步步改進(jìn),現(xiàn)已達(dá)到真正“易于使用”的階段,即使是對VR背景知識知之甚少的人也能夠按照分步驟指南使用它。人體工程學(xué)是我們關(guān)注的另一個(gè)非常重要的部分,我們研發(fā)了一套特殊的固定機(jī)制,使用戶既方便舒適又衛(wèi)生地穿戴Dexmo。
基于這些功能,用戶第一次可以在VR中看到自己的手,同時(shí)還可以真實(shí)地感受到自己在抓握并不存在的現(xiàn)實(shí)。在VR引入力反饋之前,其沉浸感很容易被打破:每當(dāng)你試圖抓起某個(gè)虛擬物體,但看到手指卻穿透了它,你就會(huì)意識到它不是真實(shí)的;當(dāng)你為了假裝拿著虛擬物體而不得不擺出某種姿勢時(shí),你就能意識到那不是真實(shí)的;無論動(dòng)畫或音效有多逼真,你都能察覺。
這絕對不是說我們的系統(tǒng)是完美的,或者說我們能重建人類手部的所有感知,我們現(xiàn)在還不能模擬重量。物理學(xué)告訴我們,要想模擬重力,我們需要一整套外接的機(jī)械臂系統(tǒng)來產(chǎn)生反作用力;我們也不能模擬溫度,因?yàn)橐肽M溫度,需要將半導(dǎo)體緊密地排布在整個(gè)系統(tǒng)中;我們也還不能提供更精確的觸覺,其他電機(jī)驅(qū)動(dòng)方式還有待進(jìn)一步探索和研發(fā)等等……
SDK交互模塊
綜上所述,力反饋無疑是虛擬世界中的一個(gè)重要的感官維度,一個(gè)被渴望已久的虛擬現(xiàn)實(shí)人機(jī)交互方式,它將VR人機(jī)交互的邊界又歷史性的向前推進(jìn)了一步。我們的許多軟件交互都是基于這項(xiàng)新技術(shù)開發(fā)的,比如手指的敲擊、按壓、彈撥、旋轉(zhuǎn)、滑動(dòng),按下按鍵、拉動(dòng)拉桿、旋轉(zhuǎn)旋鈕等等,為了讓開發(fā)者更容易上手,所有這些動(dòng)作都在我們的SDK中創(chuàng)建和測試過。當(dāng)與正確的圖形和動(dòng)畫效果相結(jié)合時(shí),許多原本不可能實(shí)現(xiàn)的應(yīng)用程序都將成為可能。
Dexmo的部分應(yīng)用領(lǐng)域
經(jīng)常有投資者問我:你們的客戶有哪些?這其實(shí)是一個(gè)很難回答的問題。因?yàn)楹芸烀總€(gè)人都可能成為我們的客戶。我一直認(rèn)為未來VR最基本的硬件配置就是一個(gè)頭顯加上一雙力反饋手套。目前我們正在與一些研究機(jī)構(gòu)、前沿工業(yè)專家和大學(xué)合作,這些合作涵蓋了各種各樣的項(xiàng)目,例如:飛行模擬、航空航天仿真、航天員訓(xùn)練、筆記本電腦裝配線訓(xùn)練、安全生產(chǎn)培訓(xùn)、汽車裝配培訓(xùn)、教育、醫(yī)療培訓(xùn)、康復(fù)訓(xùn)練、大空間游戲、展覽、遠(yuǎn)程操作等,因此各行各業(yè)都有我們的潛在客戶。力反饋手套確實(shí)為虛擬場景增加了另一個(gè)層次的沉浸感,使其更加真實(shí)。
舉幾個(gè)具體的例子:
我們的一個(gè)客戶在做筆記本電腦裝配線上的員工培訓(xùn)的實(shí)驗(yàn),在中國,很多生產(chǎn)線存在著工人流失率高的問題,這意味著很多熟練工人必須花費(fèi)大量的時(shí)間來教新手操作流程,這就降低了他們的產(chǎn)量和工廠的整體經(jīng)濟(jì)效益。第一個(gè)實(shí)驗(yàn)應(yīng)用的是Oculus,新入職工人使用Oculus Touch在VR中學(xué)習(xí)裝配電腦,雖然他們覺得這很有趣,裝配流程中需要靈活使用手指的操作步驟并沒有反映在虛擬訓(xùn)練中,這使得該培訓(xùn)軟件的訓(xùn)練效果遠(yuǎn)不如預(yù)期。但當(dāng)他們開始使用Dexmo進(jìn)行訓(xùn)練時(shí),工人們可以更快更適應(yīng)地接受培訓(xùn)課程,因?yàn)镈exmo的手部互動(dòng)更直接。
還有一個(gè)例子是飛行仿真訓(xùn)練。在我們仿真訓(xùn)練領(lǐng)域的客戶中,駕駛艙模擬是一個(gè)常見場景,它通常需要讓用戶在VR中撥動(dòng)開關(guān)和按下按鈕,而這是手柄無法做到的。在這種情況下,LeapMotion相對不穩(wěn)定,而我們的力反饋技術(shù)則可以滿足其需求。可以想象一下,在未來飛行員都必須通過VR飛行模擬考試,而不僅僅是閱讀手冊來猜測要按哪個(gè)按鈕。
在核電站,操作人員可以接受VR培訓(xùn)以應(yīng)對潛在的核泄漏等緊急情況,他們可以在虛擬環(huán)境中學(xué)習(xí)拉哪個(gè)操縱桿,先轉(zhuǎn)動(dòng)哪個(gè)把手或旋鈕,接受應(yīng)對各種可能發(fā)生的災(zāi)難現(xiàn)場的流程培訓(xùn);在太空項(xiàng)目中,為了讓宇航員預(yù)先熟悉太空任務(wù),我們可以用VR技術(shù)建造空間站,而不需花大價(jià)錢在地面上復(fù)制空間站,他們將能夠在VR中模擬執(zhí)行任務(wù)。
我一直認(rèn)為Dexmo最大的潛力是在游戲和VR社交領(lǐng)域。在RecRoom中,你可以拿起旗子、投籃、扣下十字弩的扳機(jī)等等。想象這一切動(dòng)作都變得無縫貼近現(xiàn)實(shí),你不需要學(xué)習(xí)或者記住哪個(gè)按鈕是做什么動(dòng)作的,或者按下哪個(gè)組合鍵可以調(diào)出菜單欄……你可以做任何你在現(xiàn)實(shí)生活中做的動(dòng)作。你想摘個(gè)蘋果,就直接用手去摘吧;你想給槍裝彈,只要把彈匣插進(jìn)去,拉一下槍栓即可;你想打開一個(gè)盒子,打開電視,喝一瓶水……一切的互動(dòng)都是直接的。當(dāng)然,Dexmo帶來的幫助遠(yuǎn)不止我剛才所列出的。
我想你們也有很多問題想問,所以我先簡要回答一些常見的問題。
Dexmo支持Oculus/Vive/PSVR/WMR/HoloLens嗎?
是的。Dexmo兼容于大多數(shù)房間尺度的VR系統(tǒng)。Dexmo目前還沒有一個(gè)內(nèi)置的空間追蹤解決方案,因?yàn)樵谶@個(gè)階段我們想讓它更開放地兼容所有空間追蹤解決方案。在技術(shù)上,它支持任何帶有6自由度的運(yùn)動(dòng)手柄的VR系統(tǒng),所需要的只是一對坐標(biāo)和方向,以及初始位置校準(zhǔn)。HoloLens略有不同,因?yàn)樗鼪]有自帶6自由度的手柄,而且它是一個(gè)一體化系統(tǒng),甚至沒有USBhub,但如果我們能將一些其他跟蹤數(shù)據(jù)(如OptiTrack)傳輸?shù)较到y(tǒng)中,它仍然可行。
Dexmo的價(jià)格?
簡而言之:很貴。雖然我希望每個(gè)人都能盡快得到Dexmo,但目前的版本實(shí)際上是針對B端客戶的。先別沮喪,聽我說完,我向你保證我們現(xiàn)在之所以這樣做是有道理的。
你們公司的未來計(jì)劃是什么?
2014年,我們?nèi)∠薑ickstarter的眾籌,因?yàn)槲覀円庾R到Dexmo還沒有做好面向消費(fèi)者的準(zhǔn)備。消費(fèi)者想要的是價(jià)格低廉、支持良好、帶有大量游戲、開箱即用的產(chǎn)品。功能只是普通消費(fèi)者想要的眾多需求之一。撇開價(jià)格因素不談,我們還沒有完備的各項(xiàng)支持。硬件方面,我們需要從SDK層面集成進(jìn)Facebook,微軟,索尼和HTC等頭顯設(shè)備制造者的系統(tǒng)中;在軟件方面,我們需要來自開發(fā)者社區(qū)的支持,在普通消費(fèi)者購買Dexmo之前先開發(fā)好游戲。這些都需要我們現(xiàn)在市場中證明力反饋手套是正確的發(fā)展方向。
我們計(jì)劃通過同B端伙伴合作來實(shí)現(xiàn)這一目標(biāo)。通過為早期采用者提供最先進(jìn)的技術(shù),他們可以開發(fā)更令人驚嘆的VR項(xiàng)目,從而使他們的經(jīng)濟(jì)受益。這些早期采用者愿意為研發(fā)做投入,他們可以使用Dexmo進(jìn)行開發(fā)并提供更多有價(jià)值的反饋,我們可以一起創(chuàng)造更多令人驚嘆的VR體驗(yàn),來向世人展示一個(gè)優(yōu)秀而完整的VR系統(tǒng)能夠做到什么程度。我們希望推動(dòng)力反饋手套和頭顯最終成為VR系統(tǒng)的默認(rèn)硬件配置,到那時(shí)它將成為每個(gè)人都需要的東西。
作為普通消費(fèi)者,我們什么時(shí)候能買到它?
為了維持公司的運(yùn)營并不斷推進(jìn)VR人機(jī)交互的發(fā)展邊界,我們需要足夠的資金。我們籌集的很多資金都投入到了研發(fā)。我們首先需要成為一個(gè)盈利的公司,這樣才能使力反饋手套的消費(fèi)者版本更快面世。如果我們提前賣給普通消費(fèi)者不能使他們滿意的產(chǎn)品,而且售價(jià)又不能覆蓋我們的研發(fā)成本,我們將很難實(shí)現(xiàn)這個(gè)目標(biāo)。所以,請讓更多的人知道Dexmo,盡管你還不能買到它,但大家可以談?wù)撍窒硭男畔ⅲ@對于產(chǎn)品的未來很有幫助。當(dāng)我們每年可以出貨數(shù)萬套Dexmo的時(shí)候,憑借規(guī)模經(jīng)濟(jì)效應(yīng)和之前做好的市場驗(yàn)證,我們離消費(fèi)者就不遠(yuǎn)了。雖然消費(fèi)者版本的推出時(shí)間還不明確,但我們會(huì)盡我們所能,讓它盡早到達(dá)消費(fèi)者手中。
好的,我們已經(jīng)接近尾聲了。感謝閱讀這篇長文。請容許我這樣說,我認(rèn)為Dexmo標(biāo)志著在沉浸式VR領(lǐng)域踏出的關(guān)鍵一步,它完成了一件既非常困難又及其重要的事情。當(dāng)然,這個(gè)系統(tǒng)離完美還有一定距離。籌集到資金的規(guī)模,商業(yè)驗(yàn)證推進(jìn)的時(shí)間線,研發(fā)上的投入……但我們正在一步步邁向目標(biāo)。我們在辛苦工作,我們知道自己正在做什么,它將會(huì)變得越來越好。這就是我們想要傳達(dá)的給大家的信息。
-
人機(jī)交互
+關(guān)注
關(guān)注
12文章
1201瀏覽量
55328 -
vr
+關(guān)注
關(guān)注
34文章
9634瀏覽量
150077 -
交互技術(shù)
+關(guān)注
關(guān)注
0文章
32瀏覽量
12713
原文標(biāo)題:Dexta Robotics CEO谷逍馳:從Dexmo創(chuàng)造史看力反饋交互技術(shù)
文章出處:【微信號:vrtuoluo,微信公眾號:VR陀螺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
編程語言的誤區(qū)與常見問題
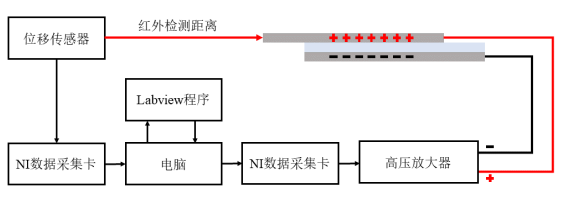
Aigtek高壓放大器在靜電吸附的觸覺力反饋研究中的應(yīng)用
電壓跟隨器是什么反饋類型
如何區(qū)分并聯(lián)反饋和串聯(lián)反饋的區(qū)別
模電串聯(lián)反饋和并聯(lián)反饋的區(qū)別是什么
負(fù)反饋放大電路的含義是什么
正反饋和負(fù)反饋對控制系統(tǒng)的影響
模電中正反饋和負(fù)反饋的區(qū)別
負(fù)反饋對增益和帶寬的影響
如何判斷放大電路的反饋類型
反饋放大電路的反饋極性是否在線路接成后就確定了?
如何判斷電壓、電流反饋






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論