") 關(guān)于多通道矢量信號(hào)源的時(shí)差定位系統(tǒng)性能測(cè)試分析和說(shuō)明
關(guān)于多通道矢量信號(hào)源的時(shí)差定位系統(tǒng)性能測(cè)試分析和說(shuō)明
時(shí)差定位系統(tǒng)測(cè)試是系統(tǒng)性能評(píng)估的重要組成部分。為了測(cè)試時(shí)差定位系統(tǒng)復(fù)雜電磁信號(hào)環(huán)境適應(yīng)性,可以采用半實(shí)物仿真測(cè)試模式構(gòu)建多輻射源和多路徑信號(hào)環(huán)境。利用多通道矢量信號(hào)源模擬產(chǎn)生某定位場(chǎng)景下各基站的接收信號(hào),用于時(shí)差定位系統(tǒng)測(cè)試。本文介紹了利用R&S公司的雙通道SMW200A和兩個(gè)SGS100A矢量信號(hào)發(fā)生器構(gòu)建四站時(shí)差定位測(cè)試環(huán)境,測(cè)試四站時(shí)差定位系統(tǒng)的時(shí)差測(cè)量精度、時(shí)差定位精度、復(fù)雜電磁信號(hào)環(huán)境適應(yīng)性等系統(tǒng)性能參數(shù)。
1 引言
時(shí)差定位系統(tǒng)在導(dǎo)航、遙感、航空、監(jiān)控等方面有著廣泛的應(yīng)用。時(shí)差定位系統(tǒng)依靠?jī)蓚€(gè)觀測(cè)站采集到的同一輻射源信號(hào)的到達(dá)時(shí)間差確定一對(duì)雙曲面(線),多個(gè)雙曲面(線)相交就可以得到目標(biāo)輻射源的位置,為了消除模糊,一般需要至少3個(gè)定位站。由于時(shí)差定位系統(tǒng)具有反隱身性能和隱蔽性的特點(diǎn),因此其發(fā)展和應(yīng)用越來(lái)越受到人們的重視。
為了有效評(píng)估時(shí)差定位系統(tǒng)性能,需要建立具有復(fù)雜電磁環(huán)境模擬能力的系統(tǒng)測(cè)試平臺(tái)。時(shí)差定位系統(tǒng)測(cè)試包括真實(shí)場(chǎng)景測(cè)試模式和半實(shí)物仿真測(cè)試模式(虛擬場(chǎng)景測(cè)試模式)。真實(shí)場(chǎng)景測(cè)試模式按照實(shí)際定位場(chǎng)景部署定位基站和輻射源,在真實(shí)場(chǎng)景中測(cè)試時(shí)差定位性能;半實(shí)物仿真測(cè)試模式利用多通道矢量信號(hào)源模擬產(chǎn)生某定位場(chǎng)景下各基站的接收信號(hào),并用饋線注入到各定位基站,各基站位置采用虛擬注入方式。半實(shí)物仿真測(cè)試模式具有復(fù)雜環(huán)境構(gòu)建容易、測(cè)量數(shù)據(jù)精度高、試驗(yàn)重復(fù)性好、費(fèi)效比低等優(yōu)點(diǎn),和真實(shí)場(chǎng)景測(cè)試模式相比具有一定優(yōu)勢(shì)。本文分析了時(shí)差定位系統(tǒng)半實(shí)物仿真測(cè)試方法,利用R&S公司的雙通道SMW200A和兩個(gè)SGS100A矢量信號(hào)發(fā)生器構(gòu)建四站時(shí)差定位測(cè)試環(huán)境。
2 時(shí)差定位系統(tǒng)原理
設(shè)待定位的輻射源位置為R (x, y, z), 主站位置R0 (x0, y0, z0), 副站位Ri (xi , yi , zi), (i=1, 2, 3), 設(shè)定主站位置為坐標(biāo)原點(diǎn),即可(x0 , y0 , z0)=(0, 0, 0)。時(shí)差定位測(cè)量站分布如圖1所示。

圖1 四站時(shí)差定位測(cè)量站分布
目標(biāo)信號(hào)到各站的時(shí)間分別為ti (i=0, 1, 2, 3),利用時(shí)差測(cè)量得到信號(hào)到達(dá)第 副站與主站的距離差為:
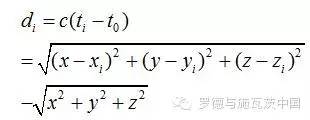
四個(gè)基站可以得到3個(gè)距離差方程,可以無(wú)模糊的解算目標(biāo)位置 。
3 多通道矢量信號(hào)源信號(hào)環(huán)境模擬能力
3.1 多通道矢量信號(hào)源
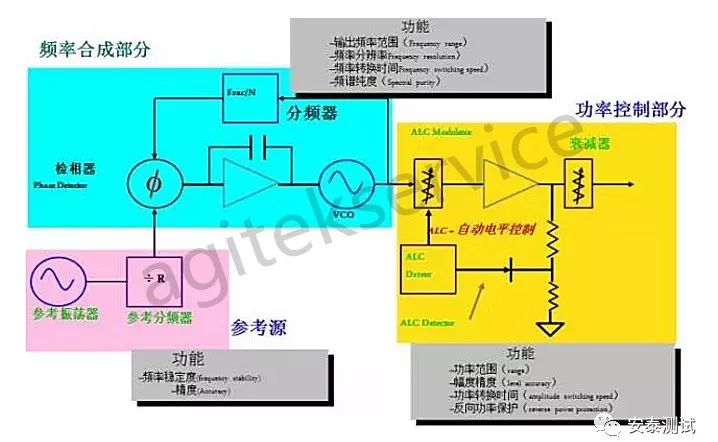
多通道矢量信號(hào)發(fā)生器(例如R&S SMW200A)能生成高品質(zhì)復(fù)雜數(shù)字調(diào)制信號(hào),頻率范圍100kHz~20GHz,內(nèi)置160MHz的I/O調(diào)制帶寬,具有2個(gè)基帶模塊和4個(gè)衰落模擬模塊。2個(gè)基帶模塊最多8個(gè)基帶發(fā)生器,帶實(shí)時(shí)編碼器和ARB任意波形發(fā)生器(儲(chǔ)存深度1G采樣)。內(nèi)置衰落模擬選件是SMW200A區(qū)別其它射頻矢量信號(hào)發(fā)生器的重要標(biāo)志,使用最新FPGA技術(shù)實(shí)現(xiàn)最多4個(gè)衰落模擬模塊,可以模擬16個(gè)衰落通道(衰落模擬器),每條衰落通道具有最多20條衰落節(jié)拍(20個(gè)衰落節(jié)拍分成4組,每組5個(gè)衰減節(jié)拍),可以仿真模擬室內(nèi)多路徑信號(hào)。
衰落通道中衰落節(jié)拍配置示意圖如圖2。每個(gè)信道的延遲包括基本延遲與附加延遲,基本延遲設(shè)置范圍0~0.5s,時(shí)間分辨率為10ns,附加延遲由4組衰落節(jié)拍控制,設(shè)置范圍最大0~40us,每組節(jié)拍中前3個(gè)節(jié)拍提供2.5ps的精確時(shí)間分辨率,后兩個(gè)節(jié)拍提供5ns的標(biāo)準(zhǔn)時(shí)間分辨率。
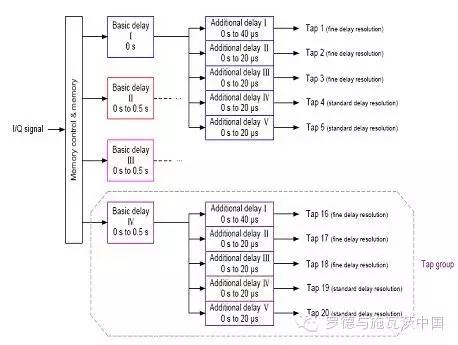
圖2 衰落通道中衰落節(jié)拍配置示意圖
SMW200A可以模擬GSM/EDGE、EDGE Evolution、3GPP FDD、CDMA2000等多種數(shù)字調(diào)制的基帶信號(hào)和任意波形編輯能力。一臺(tái)SMW200A除了有兩個(gè)獨(dú)立的射頻輸出,還有2路模擬I/Q輸出,和4路數(shù)字I/Q輸出,通過(guò)外連接SGS100A信號(hào)發(fā)生器連接模擬I/Q輸出,可以再產(chǎn)生2路射頻信號(hào),因此SMW200A能夠逼真模擬MIMO場(chǎng)景,例如2*2MIMO、4*4MIMO、8*2MIMO等,當(dāng)需要更多射頻路徑,可以利用多臺(tái)SMW200A和SGS100A搭建。
3.2用儀器搭建的四站時(shí)差定位測(cè)試環(huán)境
在實(shí)際應(yīng)用中,時(shí)差定位系統(tǒng)面臨空間多輻射源的復(fù)雜信號(hào)環(huán)境,輻射源信號(hào)包括常規(guī)脈沖信號(hào)、LFM信號(hào)、編碼信號(hào)、連續(xù)波信號(hào)、干擾信號(hào)等多種信號(hào)樣式,另外多類信號(hào)間存在交疊。不同信號(hào)樣式對(duì)不同體制時(shí)差測(cè)量有不同的影響。當(dāng)時(shí)差定位基站瞬時(shí)帶寬內(nèi)有多部輻射源信號(hào)或多路徑信號(hào)時(shí),基站接收信號(hào)交疊會(huì)使時(shí)差定位系統(tǒng)的信號(hào)分選、識(shí)別和脈沖配對(duì)變的非常困難。因此復(fù)雜電磁環(huán)境測(cè)試是時(shí)差定位系統(tǒng)測(cè)試的重要環(huán)節(jié)。
R&S SMW200A矢量信號(hào)源非常適用于MIMO信號(hào)測(cè)試,利用R&S公司的雙通道SMW200A和兩個(gè)SGS100A矢量信號(hào)發(fā)生器構(gòu)建四站時(shí)差定位態(tài)勢(shì),輸出四個(gè)定位基站模擬接收信號(hào),并用電纜分別注入到多個(gè)定位基站。通過(guò)仿真進(jìn)程推進(jìn),完成時(shí)差定位系統(tǒng)半實(shí)物仿真測(cè)試。用儀器搭建的四站時(shí)差定位測(cè)試環(huán)境如圖3。MIMO信號(hào)環(huán)境可以利用多臺(tái)SMW200A和SGS100A組合構(gòu)建,具體可以參見(jiàn)文獻(xiàn)[4]。
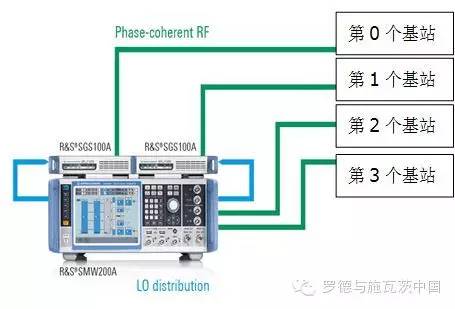
圖3 用儀器搭建的四站時(shí)差定位測(cè)試環(huán)境
SMW200A中4*4MIMO信號(hào)輸出配置界面如圖4。 基帶部分提供4個(gè)信號(hào)源和16個(gè)邏輯衰落模擬器,四個(gè)基帶信號(hào)A-D,分別經(jīng)過(guò)多信道衰落調(diào)制,并合成輸出到射頻輸出端,模擬四個(gè)基站接收。SMW200A內(nèi)置了雙通道矢量信號(hào)發(fā)生器,射頻A,B經(jīng)過(guò)矢量信號(hào)發(fā)生器本身輸出;C,D射頻輸出段分別經(jīng)過(guò)兩個(gè)SGS100A矢量信號(hào)發(fā)生器產(chǎn)生,兩儀器間通過(guò)I/Q模擬通道或數(shù)字通道連接。最終生成所需的測(cè)試信號(hào)并對(duì)外輸出。時(shí)間延遲、信號(hào)強(qiáng)度、多普勒、輻射源信號(hào)、噪聲量等參數(shù)可以通過(guò)儀器面板設(shè)置,也可以用計(jì)算機(jī)程序控制實(shí)現(xiàn)。
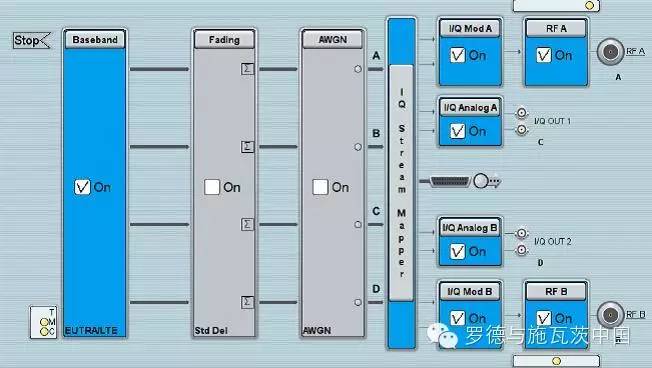
圖4 SMW200A中4*4MIMO信號(hào)輸出配置界面
4 四站時(shí)差定位半實(shí)物仿真系統(tǒng)測(cè)試信號(hào)產(chǎn)生流程和關(guān)鍵控制模型
4.1半實(shí)物仿真系統(tǒng)測(cè)試信號(hào)產(chǎn)生流程
時(shí)差定位半實(shí)物仿真系統(tǒng)是把數(shù)學(xué)模型、射頻模擬系統(tǒng)、時(shí)差定位系統(tǒng)聯(lián)合在一起的仿真試驗(yàn)系統(tǒng)。利用數(shù)學(xué)模型和射頻模擬系統(tǒng)可以構(gòu)建4個(gè)輻射源和4個(gè)接收基站的復(fù)雜電磁信號(hào)環(huán)境,半實(shí)物仿真系統(tǒng)的最小時(shí)間分辨率2.5ps,遠(yuǎn)小于時(shí)差定位系統(tǒng)時(shí)延測(cè)量精度,因此滿足時(shí)差定位系統(tǒng)測(cè)試環(huán)境構(gòu)建需求。
半實(shí)物仿真系統(tǒng)可以形成射頻閉環(huán)仿真環(huán)境,按照時(shí)差定位系統(tǒng)定位數(shù)據(jù)率設(shè)置仿真步進(jìn)間隔,推進(jìn)仿真進(jìn)程。根據(jù)仿真時(shí)間推進(jìn),解算時(shí)差定位基準(zhǔn)站和空間輻射源的空間位置、運(yùn)動(dòng)參數(shù)、系統(tǒng)參數(shù)等參數(shù)信息,產(chǎn)生位置和速度、信號(hào)參數(shù)、天線指向等參數(shù),解算各定位基站接收信號(hào)的時(shí)序(時(shí)延)、信號(hào)強(qiáng)度和多普勒等仿真控制參數(shù),控制各信號(hào)仿真分系統(tǒng)硬件模塊,完成射頻信號(hào)的產(chǎn)生,并注入到時(shí)差定位各基站。基于SMW200A的時(shí)差定位系統(tǒng)半實(shí)物仿真測(cè)試信號(hào)產(chǎn)生流程圖如圖5所示。
測(cè)試時(shí)半實(shí)物仿真系統(tǒng)與時(shí)差定位系統(tǒng)之間能夠數(shù)據(jù)通信,通過(guò)LAN或GPIB數(shù)據(jù)總線實(shí)時(shí)傳輸時(shí)間-時(shí)差定位基站位置信息,以滿足時(shí)差定位系統(tǒng)自身定位需求。測(cè)試獲得時(shí)差測(cè)量精度、時(shí)差定位精度、復(fù)雜電磁信號(hào)環(huán)境適應(yīng)性等系統(tǒng)性能參數(shù)。
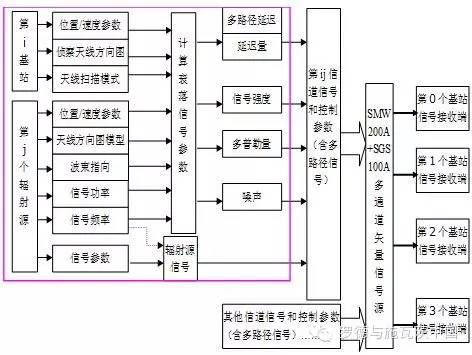
圖5 基于SMW200A的時(shí)差定位系統(tǒng)半實(shí)物仿真測(cè)試信號(hào)產(chǎn)生流程圖
4.2 信號(hào)幅度模型
定位基站偵收到輻射源信號(hào)強(qiáng)度為:
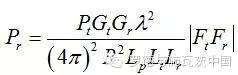
式中:Pr為偵收天線輸出的輻射源信號(hào)功率;Pt為輻射源輸出功率;Gr為輻射源天線增益;Gt為定位基站天線增益;λ為信號(hào)波長(zhǎng);R為偵收天線至輻射源的距離;Lp為偵收天線極化損耗;Lt為輻射源發(fā)射天線饋線損耗;Lr為偵收天線饋線損耗;Ft為輻射源天線方向圖因子;Fr為偵收天線方向圖因子。
4.3 時(shí)延控制模型
由于延遲系統(tǒng)存在時(shí)延量化分辨率,因此需要將時(shí)延量化成離散數(shù)字量,第i基站的時(shí)延控制量為:
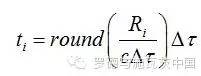
其中輻射源相對(duì)于各時(shí)差定位站的徑向距離Ri,時(shí)延量化分辨率Δτ,c為光速。
輻射源相對(duì)于各時(shí)差定位基站的徑向距離為:

式中:[xs , ys , zs]為輻射源位置。[xi , yi , zi]為時(shí)差定位基站位置。
由于時(shí)差是相對(duì)的,可以求取最小時(shí)延基站編號(hào),其他基站的時(shí)間延遲控制為:

其中q為最小時(shí)延基站編號(hào),對(duì)應(yīng)延遲控制為Δtq=0,其它基站延遲為正值。
5 結(jié)束語(yǔ)
時(shí)差定位半實(shí)物仿真系統(tǒng)具有復(fù)雜環(huán)境構(gòu)建容易、測(cè)量數(shù)據(jù)精度高、試驗(yàn)重復(fù)性好、費(fèi)效比低等優(yōu)點(diǎn),是時(shí)差定位系統(tǒng)內(nèi)場(chǎng)試驗(yàn)和定位性能測(cè)試的重要環(huán)節(jié)。本文給出了時(shí)差定位系統(tǒng)原理,以及多通道矢量信號(hào)環(huán)境需求,并介紹了多通道矢量信號(hào)源信號(hào)環(huán)境模擬能力。最后給出了時(shí)差定位系統(tǒng)半實(shí)物仿真測(cè)試控制流程和測(cè)試模型,構(gòu)建了時(shí)差定位測(cè)試環(huán)境,測(cè)試四站時(shí)差定位系統(tǒng)時(shí)差測(cè)量精度、定位精度、復(fù)雜電磁信號(hào)環(huán)境適應(yīng)性等系統(tǒng)性能參數(shù)。
-
分辨率
+關(guān)注
關(guān)注
2文章
1045瀏覽量
41885 -
信號(hào)發(fā)生器
+關(guān)注
關(guān)注
28文章
1455瀏覽量
108659 -
矢量信號(hào)源
+關(guān)注
關(guān)注
0文章
20瀏覽量
13219
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
多通道相參微波射頻信號(hào)發(fā)生器/信號(hào)源推薦

多通道負(fù)載測(cè)試和性能評(píng)估?
鼎陽(yáng)科技發(fā)布SSG6082A-V全新矢量信號(hào)源

KEYSIGHT是德 E5052B 信號(hào)源分析儀(SSA)
ATG-3080功率信號(hào)源:信號(hào)源原理介紹
ATG-3090功率信號(hào)源的應(yīng)用領(lǐng)域有哪些
ATG-3080功率信號(hào)源的應(yīng)用領(lǐng)域有哪些

安泰ATG-3090功率信號(hào)源的輸出信號(hào)是什么意思

單通道和多通道高性能信號(hào)源 APLC技術(shù)手冊(cè)
信號(hào)源的組成以及應(yīng)用方案詳解
傻傻分不清?射頻模擬信號(hào)源和矢量信號(hào)源的區(qū)別
射頻信號(hào)源的LF源與AM調(diào)制信號(hào)源是如何調(diào)試的呢?
功率信號(hào)源是什么意思
功率信號(hào)源指標(biāo)參數(shù)有哪些
功率信號(hào)源的主要性能指標(biāo)參數(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論