") 關(guān)于從指定方向圖合成陣列優(yōu)化工作流程的分析
關(guān)于從指定方向圖合成陣列優(yōu)化工作流程的分析
在那些使用傳感器陣列的應(yīng)用中,例如 WLAN、LTE 和 5G 無(wú)線通信系統(tǒng)、相控陣?yán)走_(dá)和聲信號(hào)波束成形系統(tǒng),設(shè)計(jì)通常從滿(mǎn)足某些性能標(biāo)準(zhǔn)的陣列方向圖開(kāi)始。這些標(biāo)準(zhǔn)包括諸如主瓣方向性和寬度、零位置和旁瓣電平之類(lèi)的參數(shù)。
由于陣列通常包含數(shù)百甚至數(shù)千個(gè)陣元,因此可能需要多次迭代才能在產(chǎn)生期望方向上收斂到一個(gè)所需的方向圖。迭代需要時(shí)間,并且當(dāng)需要考慮多個(gè)參數(shù)時(shí)難以徹底完成。
優(yōu)化技術(shù)可以極大地提高陣列分析過(guò)程的效率。您可以通過(guò)一系列權(quán)重和陣元位置來(lái)評(píng)估一種方向圖,并且可以通過(guò)自動(dòng)過(guò)程的每次迭代來(lái)評(píng)估已生成的方向圖與期望方向圖之間的差異。
本文介紹了一種工作流程,使用 Phased Array System Toolbox、Optimization Toolbox 和 Global Optimization Toolbox 的優(yōu)化技術(shù)來(lái)提供解決方案。
設(shè)計(jì)選項(xiàng)和約束
為確保解決方案滿(mǎn)足設(shè)計(jì)指標(biāo),我們必須了解設(shè)計(jì)選項(xiàng)和優(yōu)化過(guò)程中需要考慮的約束條件。
影響陣列形式的參數(shù)包括陣列中陣元的數(shù)量、陣元的晶格結(jié)構(gòu)和陣列形式。在陣列內(nèi),與每個(gè)陣元相關(guān)聯(lián)的參數(shù)還確定了波束方向圖特征,包括應(yīng)用于每個(gè)陣元(幅度或相位)的權(quán)重和陣元在陣列內(nèi)的位置。這些參數(shù)可以用作“控制旋鈕”,滿(mǎn)足您想要的性能目標(biāo)。
對(duì)于多元陣列,設(shè)計(jì)的自由度將根據(jù)最終應(yīng)用的成本和復(fù)雜性而變化。例如,在最基本的系統(tǒng)中,僅幅度權(quán)重可用。然而,許多架構(gòu)支持陣元或子陣列的復(fù)數(shù)加權(quán),可提供幅度和相位控制。通過(guò)這種類(lèi)型的架構(gòu),波束可以通過(guò)電子方式轉(zhuǎn)向和成形(圖 1)。
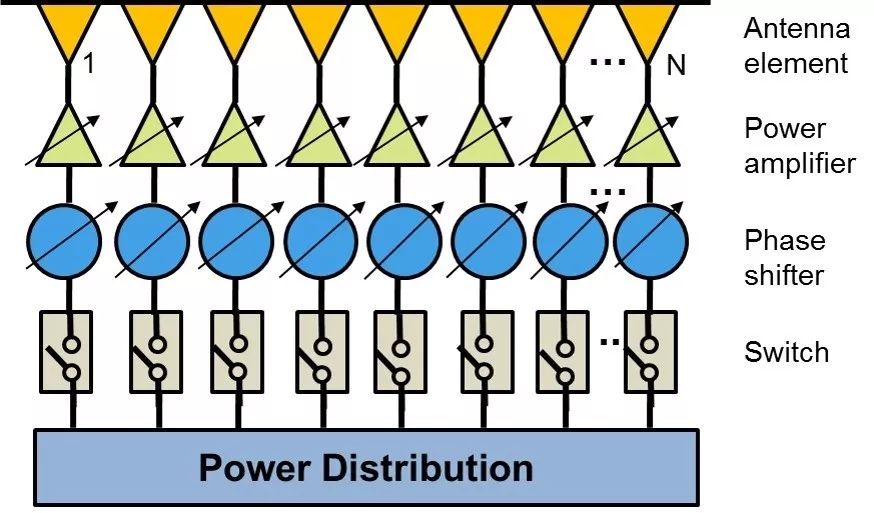
圖1:靈活的相控陣架構(gòu)。
設(shè)計(jì)中的陣列形式通常由終端系統(tǒng)形狀因子的約束驅(qū)動(dòng),但各陣元之間的間距可以是靈活的。然而,這種靈活性通常受到實(shí)際制造條件的限制。例如,各陣元不能太靠近,否則將影響陣列的有效性。
為了說(shuō)明如何將這些選項(xiàng)和約束納入優(yōu)化工作流程,我們將提供兩個(gè)示例。在第一個(gè)示例中,我們使用具有均勻間距的 8 陣元線陣來(lái)生成一組陣元權(quán)重,重點(diǎn)是匹配已知方向圖。在第二個(gè)示例中,我們構(gòu)建了一個(gè)面陣,其中陣元權(quán)重和陣元位置收斂,以實(shí)現(xiàn)一組陣列性能指標(biāo)。也就是說(shuō),我們從權(quán)重?cái)U(kuò)展到陣元位置,展示如何通過(guò)將約束條件置于優(yōu)化問(wèn)題中,來(lái)塑造方向圖以滿(mǎn)足要求。
示例 1:僅優(yōu)化權(quán)重
在這個(gè)例子中,我們將完成以下步驟(圖 2):
確定期望方向圖
開(kāi)發(fā)一個(gè)代價(jià)函數(shù),盡可能縮小起始方向圖和期望方向圖之間的距離
運(yùn)行優(yōu)化
使用生成的權(quán)重查看方向圖,并將其與期望方向圖進(jìn)行比較
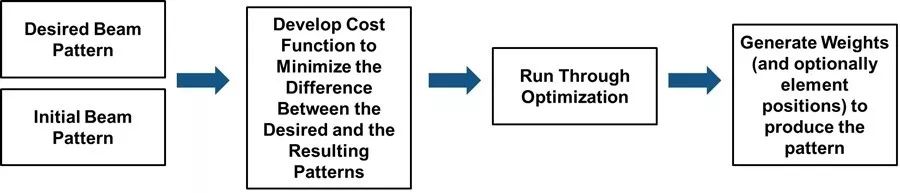
圖2:示例 1 的工作流程步驟。
我們從期望的 2D 方向圖 Beam_d 開(kāi)始,該方向圖具有一組特定的方位角和仰角。然后構(gòu)建一個(gè)成本函數(shù),縮小期望方向圖 Beam_d 與加權(quán)向量 weight_o 生成的方向圖之間的距離。優(yōu)化的初始條件基于均勻加權(quán)。此方向圖包含在以下代碼的目標(biāo)函數(shù)中。
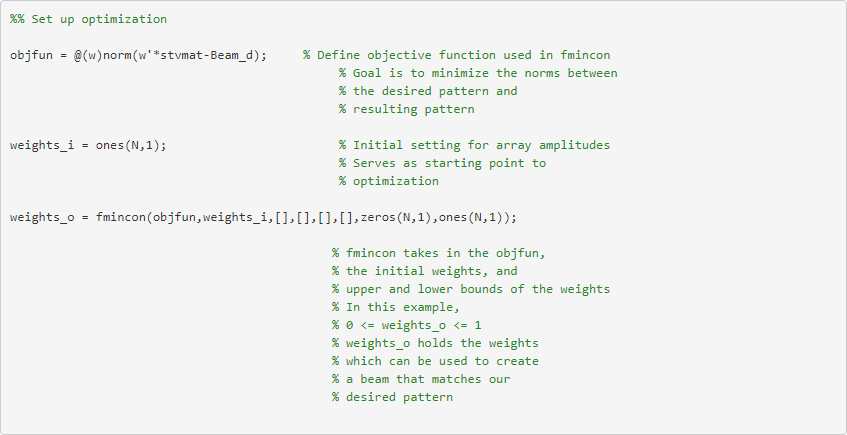
因?yàn)槲覀冋趪L試確定可以縮小兩個(gè)波束方向圖之間距離的陣元權(quán)重,所以我們將使用 Optimization Toolbox 的 fmincon 函數(shù),該函數(shù)包含目標(biāo)函數(shù)、權(quán)重的初始值和約束。初始加權(quán)值設(shè)置為 1。約束是分?jǐn)?shù)加權(quán)值的最小值和最大值,我們將其定義為介于 0 和 1 之間。
當(dāng)我們調(diào)用 fmincon 時(shí),我們提供了目標(biāo)函數(shù)的句柄,它可以區(qū)分一開(kāi)始使用的方向圖與迭代細(xì)化權(quán)重時(shí)生成的方向圖。優(yōu)化結(jié)束時(shí),我們可以得到一組權(quán)重,將其應(yīng)用于數(shù)組陣元時(shí)會(huì)與期望方向圖匹配。圖 3 中的曲線顯示了方位角上期望方向圖和合成方向圖的幅度。
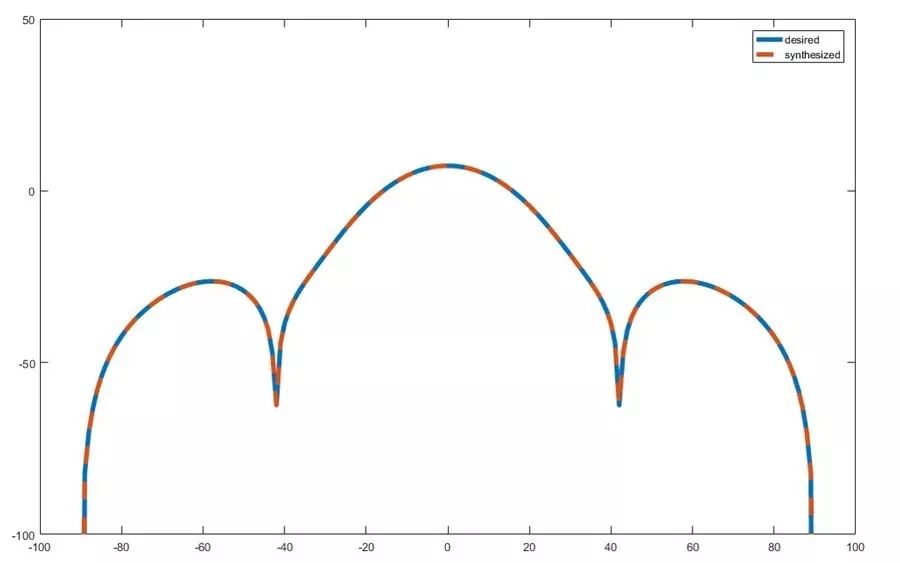
圖3:優(yōu)化后期望方向圖和合成方向圖的比較。
示例2:優(yōu)化權(quán)重和陣元位置
在此示例中,我們將完成以下步驟(圖 4):
識(shí)別方向圖屬性
定義約束,確保系統(tǒng)可以實(shí)現(xiàn)
開(kāi)發(fā)一個(gè)客觀(成本)函數(shù),得到所需“方向”的方向圖屬性
運(yùn)行優(yōu)化
將優(yōu)化的方向圖與期望方向圖進(jìn)行比較
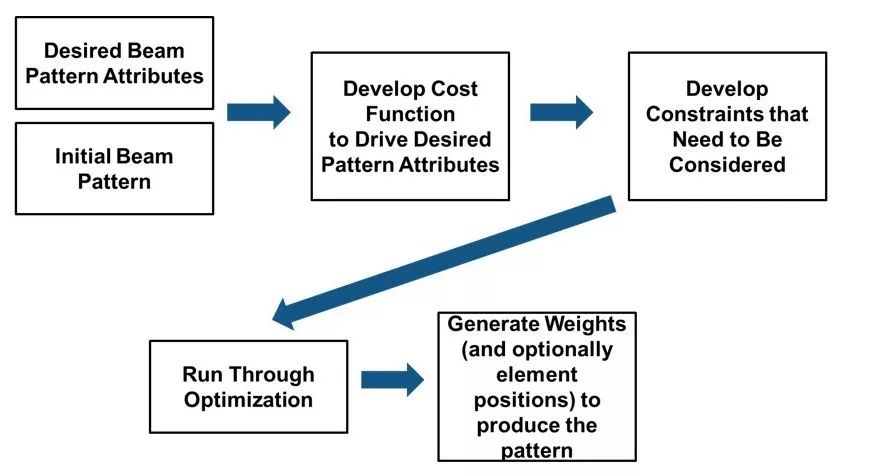
圖4:示例 2 的工作流程步驟。
請(qǐng)注意,與示例 1 只控制陣元的幅度權(quán)重不同,這種設(shè)計(jì)更復(fù)雜,具有更多的陣列陣元。我們現(xiàn)在要控制每個(gè)陣元的幅度、相位和 2D 位置。我們的優(yōu)化目標(biāo)是降低方向圖的最大旁瓣電平。
由于此示例具有許多局部最優(yōu)解且目標(biāo)非光滑,因此我們將使用 Global Optimization Toolbox 的 patternsearch 求解器。當(dāng)目標(biāo)光滑時(shí),globalsearch 可能是更好的選擇。
與前面的示例一樣,我們需要確保優(yōu)化過(guò)程計(jì)算出的陣元位置間隔不會(huì)過(guò)于緊密。我們將為幅度和相位設(shè)置相同的最小和最大范圍。
在此示例中,我們的自由度為 100:除了 25 個(gè)幅度值和 25 個(gè)相位值(每個(gè)陣元一個(gè))之外,還有 50 個(gè) y-z 位置來(lái)描述 25 個(gè)陣元位置。每個(gè)參數(shù)的下限(lb)和上限(ub)值包含在 100 個(gè)陣元的 MATLAB 向量中,其中向量元素 1 至 25 表示(yz 陣列的)初始 y 位置,而向量元素 26 至 50 表示初始 z 位置。
圖 5 左側(cè)的陣列顯示了間隔均勻的陣元的初始位置。對(duì)于 y-z 平面陣元位置的下限和上限,我們使用(±0.24 * λ)均勻矩形陣列起點(diǎn)的間距建立網(wǎng)格(圖5,右)。
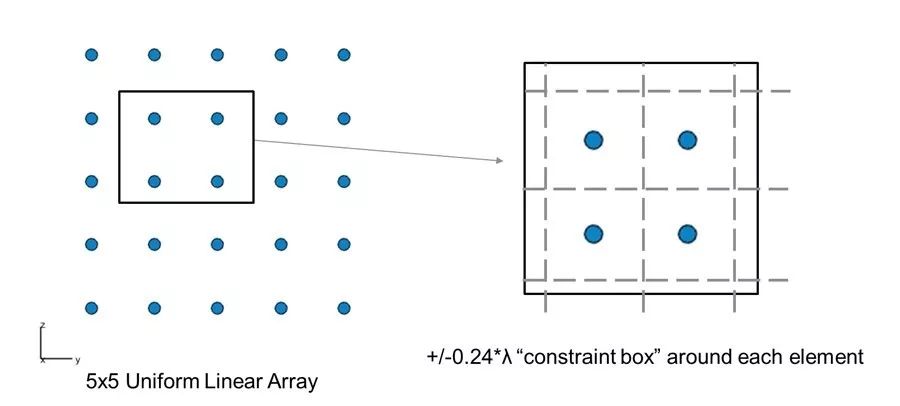
圖5:左圖:均勻線性陣列(5x5個(gè)陣元)。右圖:每個(gè)陣元周?chē)鷮?duì)應(yīng)的“約束框”。
向量元素 51 至 75 表示初始幅度值,向量元素 76 至 100 表示初始相位值。該向量的每個(gè)部分包括 25 個(gè)參數(shù),對(duì)應(yīng) 5x5 陣列大小。
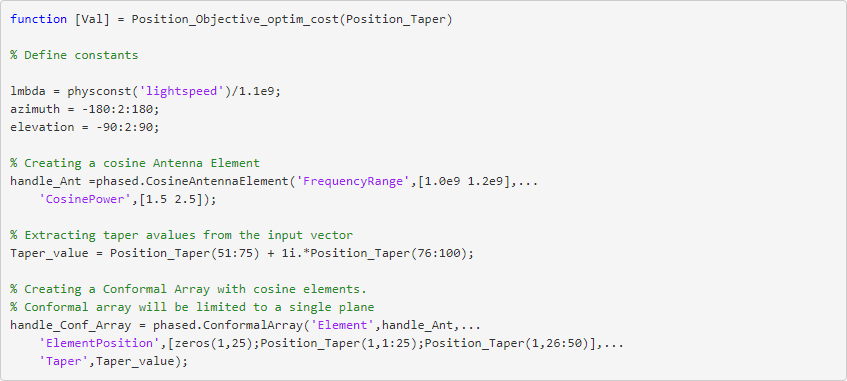
我們首先使用 Phased Array System Toolbox 建立一個(gè) 5x5 陣列,從均勻間隔的陣元開(kāi)始。然后,我們使用 ConformalArray 構(gòu)造來(lái)更改每個(gè)陣元的位置。我們可以隨著整個(gè)優(yōu)化過(guò)程中位置的變化更新我們的模型。
請(qǐng)注意,我們?cè)诖岁嚵心P椭惺褂昧死硐氲挠嘞?a target="_blank">天線陣元。我們也可以使用 Antenna Toolbox 中的方向圖或外部測(cè)量的方向圖。
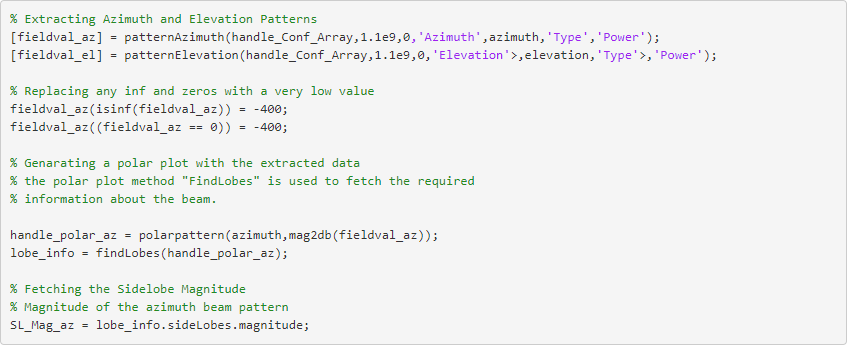
建立了陣列后,我們就可以確定方位角和仰角的波束方向圖。然后,我們可以使用此數(shù)據(jù)來(lái)提取與方向圖相關(guān)的關(guān)鍵指標(biāo)。我們將重點(diǎn)關(guān)注旁瓣,但也可以考慮許多其他參數(shù),例如主瓣增益或 3dB 波瓣寬度。
建立目標(biāo)函數(shù)
設(shè)置優(yōu)化參數(shù),實(shí)現(xiàn) 5x5 平面陣列的方位角和仰角的性能。構(gòu)建方向圖,減少旁瓣電平的幅度。其他類(lèi)似的例子可能包括增加主瓣的幅度或減小 3dB 帶寬。
在隨后的代碼中,我們使用方位角和仰角旁瓣的總和。我們還增加了一個(gè)方位角和仰角旁瓣電平之間的絕對(duì)差值,以確保它們達(dá)到峰值時(shí)是接近的。因?yàn)閮?yōu)化引擎可以最小化目標(biāo)函數(shù),所以每次迭代此函數(shù)時(shí),Val 都為最小值。您可根據(jù)特定要求調(diào)整這些參數(shù)。
圖 6 顯示了所得到的方位面中的極坐標(biāo)圖。
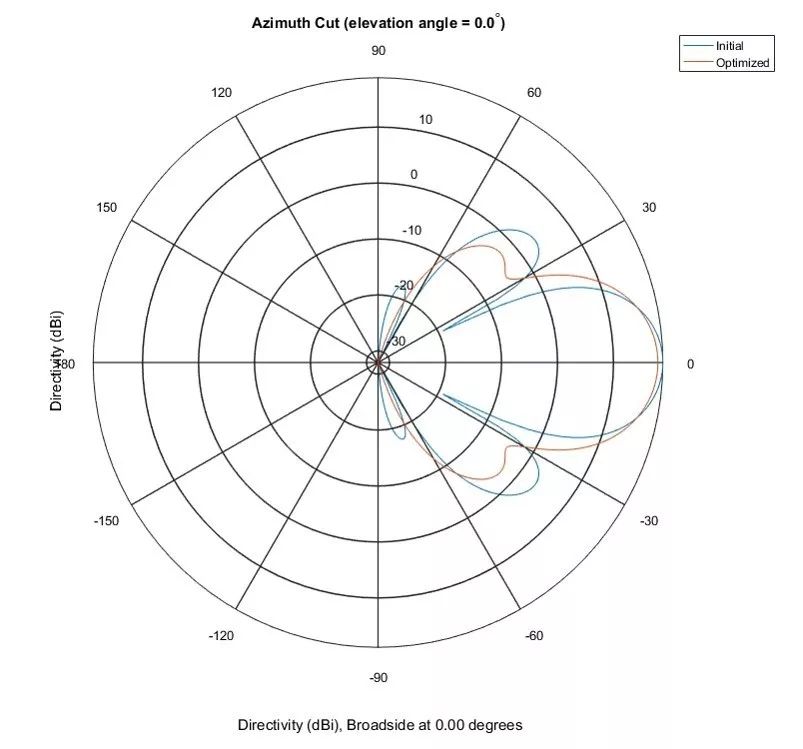
圖6:方位面中的極坐標(biāo)圖案顯示起點(diǎn)圖案(藍(lán)色線)和優(yōu)化后的圖案(橙色線)。
圖 7 顯示了仰角面的相應(yīng)視圖。
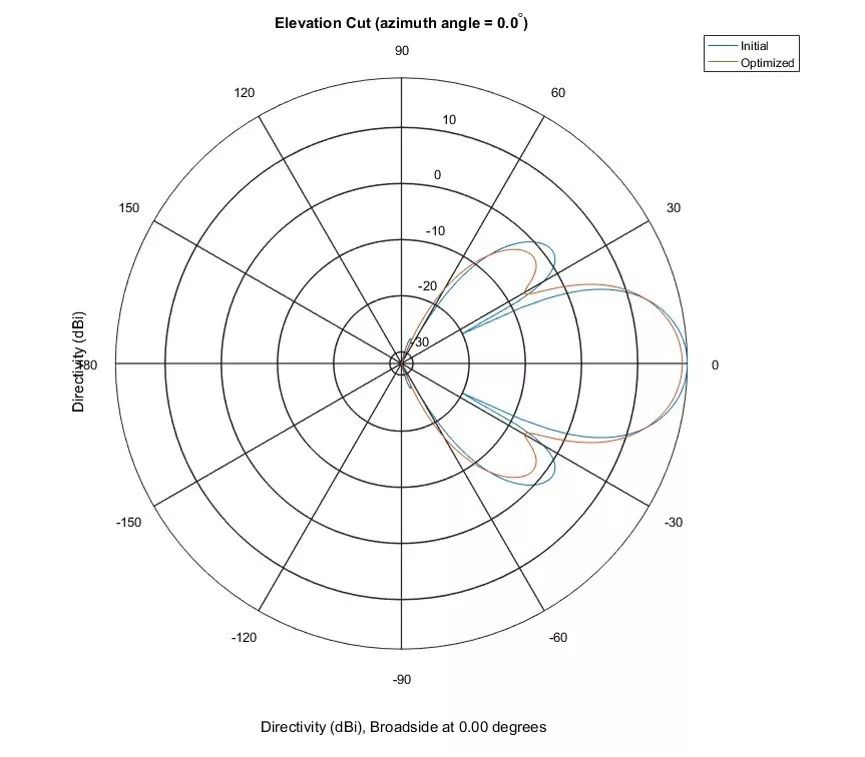
圖7:仰角面中的極坐標(biāo)圖案顯示起點(diǎn)圖案(藍(lán)色線)和優(yōu)化后的圖案(橙色線)。
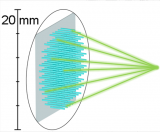
使用通過(guò)優(yōu)化函數(shù)的多次迭代返回的權(quán)重和陣元位置生成新的方向圖。圖 8 顯示了得到的陣元位置和波束方向圖。
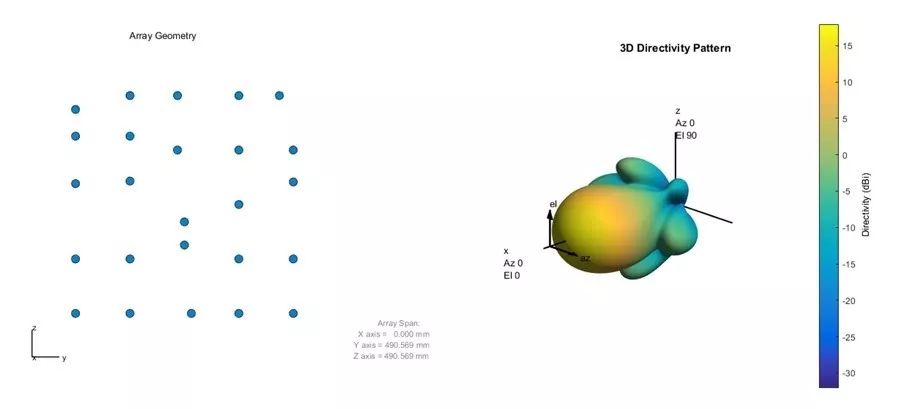
圖8:優(yōu)化后得到的陣列和波束方向圖。
擴(kuò)展示例
在這些示例中,所有分析都在單個(gè)頻率值下完成。實(shí)際上,系統(tǒng)必須在一系列頻率上工作。
可以將同樣的優(yōu)化技術(shù)應(yīng)用于各種頻率的操作。例如,針對(duì)寬帶應(yīng)用,我們可以研究整個(gè)頻帶內(nèi)等間隔的多個(gè)頻率。然后決定應(yīng)用的哪個(gè)方面最重要。例如,最好針對(duì)特定組合進(jìn)行優(yōu)化,并基于該組合選擇定位。所有其他場(chǎng)景只需使用加權(quán)即可提供“盡力而為”的服務(wù)。
如果認(rèn)為所有頻率組合都擁有特定性能要求更重要,則可以相應(yīng)地調(diào)整優(yōu)化過(guò)程。還可以擴(kuò)展優(yōu)化過(guò)程,在一組導(dǎo)向矢量上構(gòu)建最佳子陣列架構(gòu)。
除了擴(kuò)展優(yōu)化以覆蓋更寬的頻率范圍外,還可以將相移量化效果添加到 Phased Array System Toolbox 模型中,確保終端系統(tǒng)的行為與仿真結(jié)果的相同。這對(duì)優(yōu)化結(jié)果的構(gòu)建來(lái)說(shuō)非常重要。
可以通過(guò)優(yōu)化技術(shù)實(shí)現(xiàn)期望的波束性能,并以類(lèi)似的方法設(shè)計(jì)構(gòu)建在多個(gè)平面上的共形陣列。
-
函數(shù)
+關(guān)注
關(guān)注
3文章
4307瀏覽量
62432 -
代碼
+關(guān)注
關(guān)注
30文章
4750瀏覽量
68357
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Simcenter HEEDS設(shè)計(jì)空間探索和優(yōu)化軟件

淺談無(wú)刷電機(jī)的工作流程

AFE7070在VHF頻段優(yōu)化工作

人員定位系統(tǒng)的原理和工作流程

從記錄到管理:?jiǎn)伪倍?b class='flag-5'>工作記錄儀如何優(yōu)化工作流程

行云流水線 滿(mǎn)足你對(duì)工作流編排的一切幻想~skr
自動(dòng)化IC封裝模擬分析工作流程

M8_8pin公頭如何簡(jiǎn)化工作流程

鴻蒙原生應(yīng)用元服務(wù)-訪問(wèn)控制(權(quán)限)開(kāi)發(fā)工作流程相關(guān)
Ansys與SynMatrix合作,簡(jiǎn)化無(wú)線通信射頻濾波器設(shè)計(jì)工作流程
現(xiàn)場(chǎng)可編程門(mén)陣列設(shè)計(jì)流程
物聯(lián)網(wǎng)數(shù)據(jù)采集器的工作原理和工作流程
SOLIDWORKS 2024通過(guò)自動(dòng)化和縮短工作流程來(lái)實(shí)現(xiàn)智能工作





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論