 關于使用 parsim 輕松實現 Simulink 模型并行仿真的分析和研究
關于使用 parsim 輕松實現 Simulink 模型并行仿真的分析和研究
我們在用并行運算工具箱來多次運行模型的時候,一般都會改變些什么,來實現不同的仿真。
在這里,我們可以通過 Simulink.SimulationInput 對象來實現。首先,我們為模型新建若干個 Simulink.SimulationInput 對象,然后通過它來定義不同的配置,包括初始狀態、模型參數、模塊參數、輸入信息以及模型使用的各種變量。
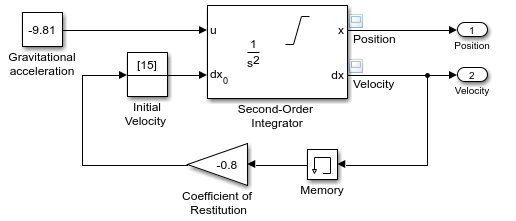
這是一個簡單的碰撞模型:
配置不同的 Restitution 系數,再實現并行仿真,如下圖:
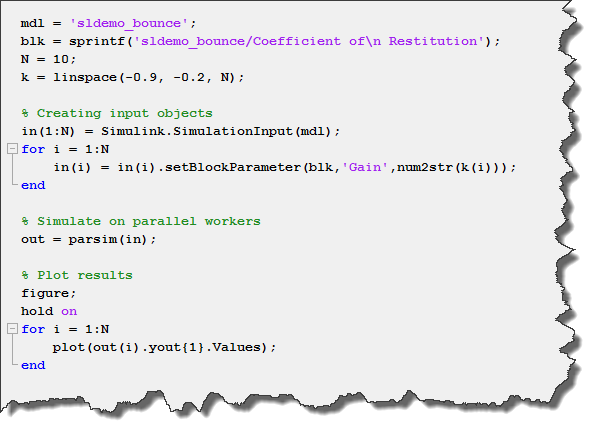
我們從 -0.9 到 -0.2 取 10 個不同的系數值,然后構造了一個長度為 10 的Simulink.SimulationInput 對象數組。接著使用 setBlockParameter 方法,給指定的模塊 blk 的參數 'Gain' 設置了不同的值。最后調用 parsim ,把Simulink.SimulationInput 數組作為輸入參數,進行并行運算。
計算完畢,就會得到一組Simulink.SimulationOutput 作為返回值。
一些更真實的場景應用
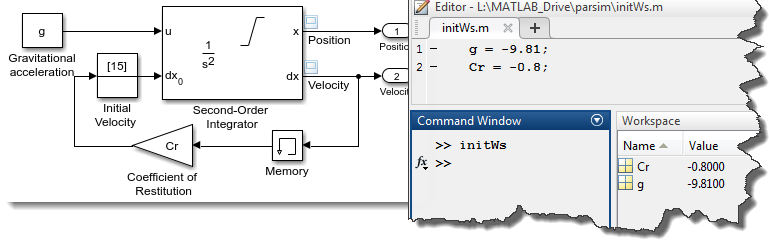
在工作空間定義變量
在 parsim 出來之前,模型并行仿真的一大難點在于怎么去管理模型里的各種變量。我在之前的貼子里還介紹了各種管理攻略,比如各個模塊的參數值不再直接寫在對話框里,而是使用腳本來構造。比如這里的重力加速度 g 和恢復系數 Cr。
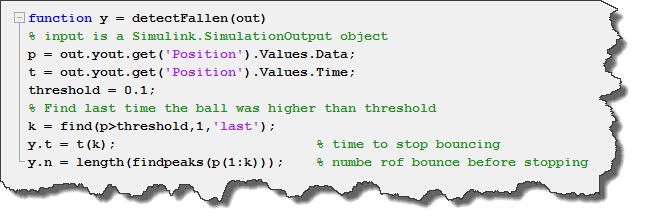
輸出的處理
在很多情況下,仿真會產生大量數據。尤其在遠程計算機集群上仿真的時候,一般都不需要傳遞全部的數據。所以,我們可以對這些記錄的數據做后處理,然后傳遞我們真正感興趣的那部分。
如下圖,這里構造了一個后處理函數 detectFallen,輸入仿真結果,返回一個結構體。這里返回的是球跳了多長時間,以及彈跳了多少次。
接著,我們跟剛才一樣構造 Simulink.SimulationInput 對象數組。有所不同的是,這里是使用 setVariable 方法來為 workspace 里的變量 Cr 設置不同的值。之后,把剛才構造的函數句柄賦給 Simulink.SimulationInput 對象的 postSimFcn 屬性。
代碼如下:
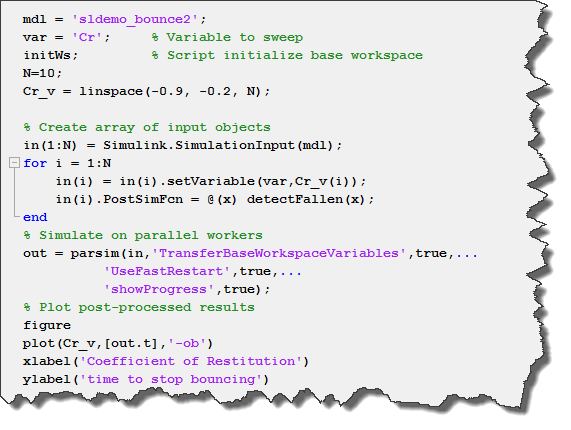
注意,在調用 parsim 時,我還使用了 UseFastRestart 來進一步加速仿真。這樣設置后,模型在每一個 worker 上只會編譯以及初始化一次。
錯誤處理
我喜歡 parsim 的另一個地方是它對仿真出錯的處理方法。
比如下面這個例子,返回的Simulink.SimulationOutput 對象里包括了錯誤提示信息以及錯誤發生之前仿真數據。
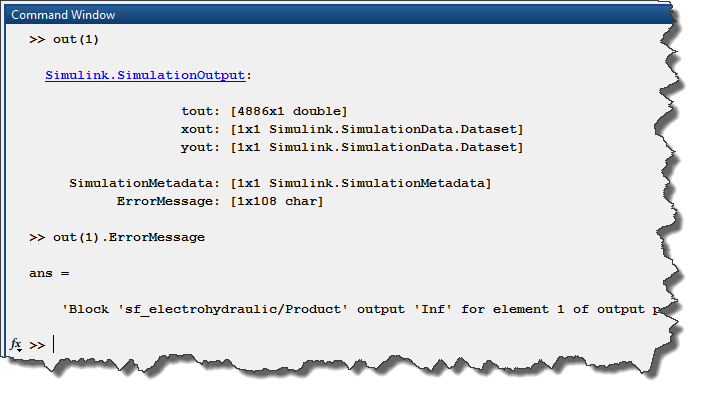
這些信息可以幫助我們理解模型哪里出了錯,也不需要重新仿真模型。
如果你基于這些記錄數據,也看不出模型哪里出了問題,那么你還可以在本地機器上使用同樣的參數配置來重新運行模型。這時候,你可以使用 SimulaitonInput 對象的applyToModel 方法。
就如它名字所說,這個函數會把這個SimulationInput 對象里的信息來配置本地模型,包括模型配置、參數值、變量值。這樣你就可以很容易得到一個跟遠程出錯的模型一模一樣的模型,在本地調試。
-
計算機
+關注
關注
19文章
7430瀏覽量
87733 -
結構體
+關注
關注
1文章
130瀏覽量
10835
發布評論請先 登錄
相關推薦
如何通過建模與仿真提升電力電子組件的設計與性能?

這些電源常用仿真軟件,你都知道嗎?
Matlab/Simulink/Stateflow建模開發及仿真測試
機器人仿真的類型和優勢

康謀分享 | 自動駕駛聯合仿真——功能模型接口FMI(二)

電路仿真軟件simulink的工作原理
【Matlab仿真】單相交交變頻器研究與實現,Simulink建模
如何提高Simulink仿真性能呢?有哪些使用技巧?

使用仿真模型進行拓撲分析

LabVIEW進行癌癥預測模型研究
芯片前仿真和后仿真的區別
Saber中如何更好地提高仿真的收斂性(一)





 工商網監
工商網監
評論