 關于TOF和雙目視覺的差異性分析
關于TOF和雙目視覺的差異性分析
那同樣是獲取場景中物體距離攝像頭物理距離的攝像方案,他們之間有什么不同的呢?
今天小編就跟大家來對比一下TOF 與 雙目視覺。
TOF Vs 雙目視覺
雙目視覺
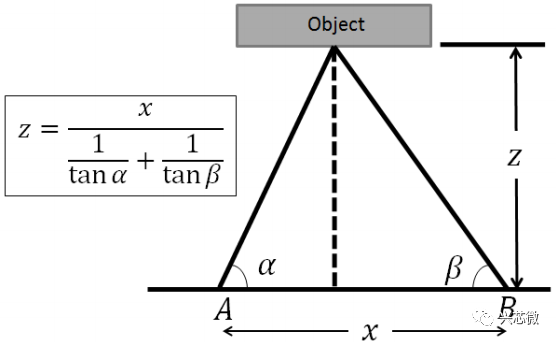
雙目立體視覺測距的原理和人眼類似,通過計算空間中同一個物體在兩個相機成像的視差就可以根據如下三角關系計算得到物體離相機的距離:
但是說起來容易,算法實現比較困難,雙目立體視覺測距算法的核心就是尋找對應關系。可以理解為給定一個相機拍攝的圖片中的任意一個像素點,如何在另外一個相機拍攝的圖像中找到和它對應的像素點,這個過程需要特征提取、特征匹配等一系列復雜的算法。但是由于光照變化、光線明暗等外在因素的影響,拍攝的兩張圖片差別可能比較大,這會對特征匹配算法提出很大的挑戰。如下圖是在不同光照條件下拍攝的圖片:
另外,如果拍攝的物體缺乏紋理和細節(比如拍攝一張白紙)的話,也很難進行特征匹配。這些都對算法的魯棒性提出了很大的挑戰。
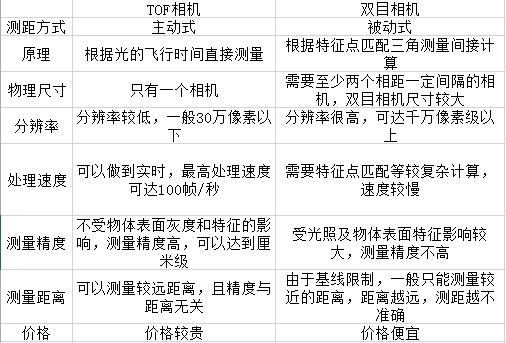
雖然TOF相機和雙目立體視覺都能實現測距的功能,但是它們還是有很大不同,在此我做了了簡單的表格如下:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
測距
+關注
關注
2文章
104瀏覽量
19617 -
光照
+關注
關注
0文章
53瀏覽量
11031 -
雙目視覺
+關注
關注
2文章
34瀏覽量
14181
發布評論請先 登錄
相關推薦
基于SoC的雙目視覺ADAS解決方案
相比于單目視覺,雙目視覺(Stereo Vision)的關鍵區別在于可以利用雙攝像頭從不同角度對同一目標成像,從而獲取視差信息,推算目標距離。
發表于 11-05 03:46
?3247次閱讀
鉅芯發布業內首顆智能雙目視覺芯片
據麥姆斯咨詢報道,物聯網及雙目視覺專家鉅芯發布了一款智能雙目立體視覺系統,以及業內首顆智能雙目立體視覺芯片eagleye100。
【WRTnode2R申請】雙目視覺隨動平臺
申請理由:之前用wrtnode的u***接雙攝像頭外加一個么mcu實現過一個一個雙目視覺隨動平臺,這樣太麻煩了,希望能用這個來實現一個更簡單的解決方案。項目描述:u***接雙攝像頭,mcu控制云臺。通過WIFI將雙目視覺傳遞到手機進行顯示,同時將手機的角度信息返回,控制云
發表于 09-10 11:25
基于SoC的雙目視覺ADAS解決方案
`相比于單目視覺,雙目視覺(Stereo Vision)的關鍵區別在于可以利用雙攝像頭從不同角度對同一目標成像,從而獲取視差信息,推算目標距離。恩智浦視覺ADAS專用SoC: S32V234未來十年
發表于 08-12 15:15
LabVIEW雙目視覺 【轉載】
` 本帖最后由 sszx2007 于 2020-3-2 17:04 編輯
LabVIEW雙目視覺原創 張冬斌 LabVIEW逆向工程高級編程 轉載至:https
發表于 03-02 17:03
基于神經網絡的雙目視覺傳感器建模
根據雙目視覺傳感器的工作原理, 分析了影響測量精度的因素, 表明雙目視覺傳感器的物體空間坐標與圖像坐標之間存在復雜的非線性映射關系, 其數學模型無法用解析式精確地加以
發表于 07-10 15:53
?11次下載
雙目視覺立體匹配算法研究
雙日視覺是計算機視覺領域的一個重要組成部分。雙目視覺研究中的關鍵技術攝像機標定和立體匹配一直是研究的熱點。本文由兩部分組成,分別對雙目視覺的算法和未標定圖
發表于 08-14 16:41
?0次下載
模擬電路設計使HDTV體現出差異性
模擬電路設計使HDTV體現出差異性
隨著高清電視(HDTV)顯示器技術的成熟,模擬視頻和音頻處理的質量將最終使電視機之間產生差異性。HDTV中的數字處理(包括圖像擴縮、
發表于 10-29 15:54
?639次閱讀
雙目視覺傳感器的現場標定技術
本文以遺視投影變換為依據,針對多視覺傳感器檢測系統中的雙目視覺傳感器,建立了雙目視覺傳感器測量空間三維坐標的模型.事先確定攝像機的部分不易變化的參數,其它參數在攝
發表于 03-02 16:02
?15次下載

一種基于圖像處理的雙目視覺校準方法
雙目視覺是利用機器視覺進行障礙物檢測的研究熱點。針對雙目視頻不同步,導致立體匹配不精準的問題,提出了一種基于圖像處理的雙目校準算法。算法首先根據道路的先驗特征模型,建立
發表于 12-18 16:26
?34次下載
電流法的測試結果差異性影響分析
原文標題:【賽盛技術案例分享】測試布置與分布參數對輻射發射及電流法的測試結果差異性影響分析 文章出處:【微信公眾號:深圳市賽盛技術有限公司】歡迎添加關注!文章轉載請注明出處。 責任編輯:haq

雙目視覺簡介及算法一般流程
1.1. 雙目視覺簡介 雙目視覺廣泛應用在機器人導航,精密工業測量、物體識別、虛擬現實、場景重建,勘測領域。 什么是雙目視覺? 雙目視覺是模擬人類視
雙目立體視覺是什么?單目視覺與雙目立體視覺的區別?
雙目更多的是基于物理測量,而單目視覺則是基于邏輯推理,通過大量的數據訓練,先識別出目標,再根據目標的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體
發表于 08-17 09:40
?3656次閱讀






 工商網監
工商網監
評論