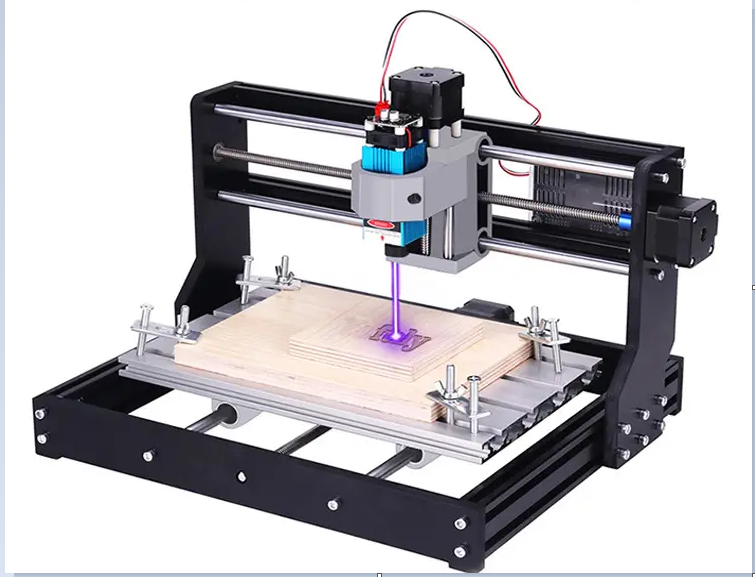
 3D打印激光雕刻機DIY圖解
3D打印激光雕刻機DIY圖解
第1步:物料清單
這是我購買的產品清單:
1x鋁型材2020擠壓,長度1 m
2x鋁型材2040擠壓,長度1 m
1x axel 8mm直徑,長度約44cm
4x鋁制角接頭及相應的螺母和螺栓
1 x批滑動螺母(我買它的批次是20個。你不要全部使用它們。)
12x尼龍輪23毫米(內部尺寸5毫米)專門用于使用的型材
1個滾珠軸承,22毫米外,8毫米內部
2x GT2皮帶輪,8mm孔,用于6 mm寬皮帶(20齒)
1x GT2皮帶輪,5mm孔,用于6 mm寬皮帶(20齒)
1x柔性軸耦合器5 mm - 8 mm
2米GT2同步帶6mm
2x NEMA17步進電機(1.8度/步,4.0 kg/cm)42BYGHW609L20P1X2,或simular
2x步進電機電纜,1米(如果您要使用電纜導管,則需要更長的電纜)
4x限位開關,孔距10 mm(印刷安裝板用于此距離)
1x Aduino Nano
12x m6 x 30 mm螺栓
8x m5 x 30 mm螺栓,螺母和墊圈
4x m5 x 55 mm螺栓,螺母和墊圈
4x m3 xn mm(其中n是取決于m3孔深度的值)電機和7毫米板厚+長度(長距離公交車)
4x m3 xn mm(其中n是取決于電機中m3孔深度和7 mm板厚的值)
一些m4還需要用于皮帶支架和限位開關安裝板的螺栓
:
1x電容器100uF
1x電阻器220歐姆
1x led
1x按鈕(電機釋放開關)
1x合適的面包板
1x 12 V電源或適配器提供足夠的安培。
1x TTL激光器,最好等于或大于500 mW。更高的功率可以很好地縮短雕刻時間!我使用的是2 W激光,確實很好。
當你做面包板時:
1x原型板/PCB玻璃纖維(34x52孔/9x15cm) )(或制作蝕刻的PCB)
1x插頭插頭2.1 x 5.5 mm插口(將焊接在PCB上并且適配器插頭插入的部件)
要打印的東西:
LE3腳
LE3測試口徑中央距離支撐輪LE3
LE3滾珠軸承口徑21.5 22 22.5 mm
LE3距離公交車
LE3電機和對面
LE3 laser_motor holder
LE3皮帶支架20x40框架
LE3限位開關安裝板20x40框架
LE3電纜夾20x40框架
如果需要:
LE3電纜安裝座和PCB安裝
第2步:STL打印文件
第3步:3D打印部件
這些都是印刷品
第4步:您需要的工具
您需要的大多數硬件可能都在您的工作室中,例如:
Plyers
螺絲刀
烙鐵
Tieraps
絲錐和模具
卡尺
真的不多。但最重要的是擁有或有權使用3D打印機。
第5步:準備工作
按以下長度切割型材:
2020型材:每件37厘米2件
2040型材:2件55厘米,每件1件42厘米。
你可以用鋼鋸看到型材但是如果你有機會使用工業微調鋸(就像我做的那樣),你必須使用它。結果要好得多。
現在你有5個框架。見 pic。 1
接下來要做的是在所有2040個配置文件中點擊M6線程。見 pic。 2
這些實際上是您必須做的唯一準備工作。
步驟6:主框架
將主框架放在一起簡單直接前進(圖1和2)。完成后你就可以很好地了解它的大小。
之后打印腳,“ LE3腳” (圖3),鉆出6毫米的孔,然后用8米6的螺栓將它們用螺栓固定在框架上。
正如你所看到的那樣,我沒有打印出一個完全厚重但一側空心的零件。這節省了大量的燈絲和印刷時間,而且非常強大!光滑的一面進出(圖4)對于堅固沒有任何區別,這是一個美容選擇。
第7步:確保打印正確,并且將載體放在一起
確定打印機的打印精度非常重要。為此,我制作了一些測試口徑:
這樣做:
打印“ LE3 距離巴士“(白色 pic.2 )
打印” LE3測試口徑中央距離支撐輪“和” LE3 滾珠軸承機芯“
用5 mm鉆頭鉆出輪軸(5mm螺栓)的孔
留在 PIC。 1 是一種測試口徑,用于確定滾珠孔必須打印多大才能讓它貼合。有三種不同的尺寸:21.5,22和22.5毫米。這些是印刷設計中的價值觀。軸承最合適的孔(你需要用力將它放入)是你需要的。
右邊你看到了測試導輪之間距離的口徑。重要的是2040框架和車輪之間沒有游隙。你可以用這個口徑來解決這個問題。只需將5個螺栓和墊片固定在三個輪子上,然后嘗試在框架移動的距離(58或59 mm)內通過車輪產生一些阻力。
注意:
我使用了22.5毫米的球軸孔和58毫米的輪距。這對我來說非常適合。如果這些值對您不起作用,那么您必須修改設計。
確定正確的尺寸后,打印“ LE3 電機和對面“,首先鉆出兩個板上的孔。
把馬車放在一起(圖2)。
你需要2040框架,長42厘米,電機和支承板,4 m6螺栓,8 m5螺栓
鉆出孔:電機孔為3毫米,輪軸孔為5毫米,孔為6毫米,將板固定在型材上
螺栓其中一個板上的兩個上輪(在公共汽車和車輪之間使用5mm墊圈,車輪必須自由轉動!)
將這些車輪放在車架上時,組裝下兩個輪子
對另一側進行相同的操作( pic.2 ,電機板在前面,軸承板在后面)
帶有4 m6螺栓的螺栓,板之間的2040框架
現在您可以移動托架了。如果你感覺到一些阻力就可以了,它會讓你覺得沒有游戲。電機足夠強大,可以處理。
這個程序集實際上是如何將這臺機器的其余部分放在一起的一般方法。從現在開始,我將不那么擴大,只會指出重要的事情。圖片也說很多。
步驟8:Axel和Motor
使用4條長途巴士將電機固定在板上(你必須弄清楚螺栓的長度,它取決于電機孔的深度)
將軸承放到位
將8毫米軸推入軸承,同時將8毫米滑輪和5毫米-8毫米柔性軸聯軸器放在軸上
將所有部件固定到位,使滑輪齒正好位于槽的上方框架
步驟9:激光/電機支架和皮帶
激光/馬達支架:
打印“ LE3 laser_motor holder ”
打印“ LE3皮帶支架20x40框架“
鉆出3.2 mm的皮帶支架并在孔中輕敲4mm螺紋
鉆出激光孔/馬達浩適當的直徑。激光器側的額外孔用于安裝我尚未設計的通用激光安裝板。
完成激光/馬達支架的組裝
暫時取走托架的2040輪廓
將輪廓滑過車輪。如果你必須努力推動配置文件低谷,那就沒關系了。當我將框架垂直于地面時,即使電機組裝完畢,重力也不會移動激光器/電機支架。
兩側放置皮帶架
再次將激光器/電機座放回原位。
在 pic上。 1 你可以看到它是如何放在一起的(圖片是在后期拍攝的。我忘了先制作一張)。 不要忘記公共汽車和車輪之間的墊圈!請不要介意激光,這只是一個測試組件。
皮帶。首先是激光支架中的一個:
將帶子帶到車輪下方和滑輪上,就像 pic一樣。 2
在皮帶支架下方的兩側引導皮帶(確保您有足夠的皮帶長度,以便您可以抓住兩側的皮帶)
在一側將皮帶支架盡可能地推到側面并固定螺栓(不要緊緊地將其緊固)
現在在另一側做同樣的操作并同時拉上皮帶和皮帶輪之間有合理的張力
對于滑架的兩條皮帶(圖3和4)做同樣的事情,但不同之處在于你只需要轉開一只腳(取下頂部螺栓并松開底部螺栓)并在一側插入兩個皮帶固定器。現在您可以將另一個滑動到滑架下方另一側。還要確保在張緊兩個皮帶后,滑架完全成直角!
結果
PS。
如果您在較早階段打印皮帶支架,可以在裝配前將它們插入框架中。
步驟10:限位開關+支架
首次打印:
LE3限位開關安裝板20x40框架
LE3電纜夾20x40框架
在圖片上。在圖1和圖2中,您可以看到主機架上裝配的限位開關。它們之間的距離約為。 45厘米(38厘米雕刻距離+ 7厘米板寬)
在圖片上。 3和4限位開關在橫桿上,距離:36厘米(29 + 7)。裝配后檢查開關是否位置正確(沒有機械碰撞)。
現在所有的機械工作都已完成。
您可以連接開關并使用電纜夾將電線固定在橫向框架槽中。
步驟11:電子設備

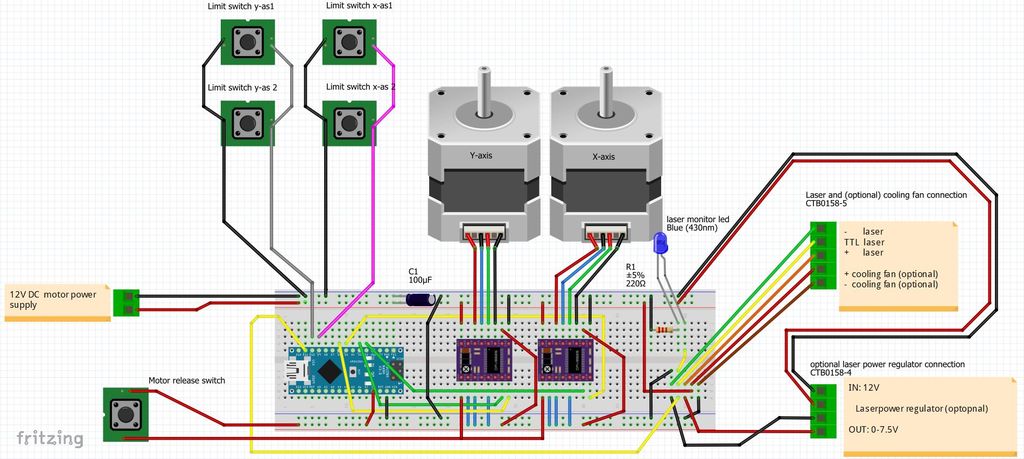
Pic。 1 示意性地顯示了部件之間的連接
P ic。 2 面包板連接應該如何。
的產品圖。 3和6 現實中的面包板
Pic。 4 我制作的原型板的電線側
Pic。 5 部分方面。注意Arduino,驅動板和所有電線連接的所有母頭連接。這些連接讓開關板(當有必要時)變得更加容易。
我為9x15 cm原型板設計了moutning brakets,這樣你就可以將電路板固定到2020型材上。這些支架是“LE3電纜安裝和PCB安裝”打印文件的一部分( pic.7和8 )。
每個驅動板上有3個連接來控制步進分辨率:M0,M1和M2。通過這些連接,您可以根據如何將這些連接連接到+ 5V來確定步進分辨率。因為我已經為兩個潛水員的3條線路中的每條線路制作了原型板跳線。它們位于 pic上的黃色圓圈中。 5.
使用這些跳線,您可以輕松設置步進分辨率:
M0 M1 M2分辨率
低低低滿
高低低半
低高低1/4
高高低1/8(這是我使用的設置
低低高1/16
高高高1/32
高位意味著:連接到+ 5V(閉合的跳線)。
你不會在面包板或原理圖上找到這些跳線,但是如果有必要的話,你可以自己實現它們。
您可以省略這些跳線并將步進分辨率永久設置為所需的步進分辨率。到目前為止,我還沒有改變跳線設置:1/8分辨率工作正常!
你也找不到 pic上的開關。 5 (右上角)。我已經實現了這個開關,在Arduino板上的D12和D11之間切換,用于控制激光器。 M03和M04(Gcode)。但我發現,使用正確的程序,您不必再使用M03,所以我將其排除在計劃之外。相反,TTL線直接連接到D11(M04)。
Ps。
請注意,在scematics上,兩個連接器(5線和4線)是必需的我,因為我自己用一個單獨的冷卻風扇來構建我的激光系統。但是,如果你有一個激光模塊,你不想調節激光的功率。您只需要5線連接器的3條上線,電源應來自激光器附帶的電源。
步驟12:軟件



用于以下目的的程序這個教學:
GRBL,版本1.1(arduino庫)
LaserGRBL.exe,用于將切片圖片或矢量圖形發送到雕刻機/切割器的程序
Inkscape,矢量繪圖程序
JTP激光工具V1.8,Inkscape為LaserGRBL制作Gcode文件所需的插件
Notepad ++
在互聯網上,您可以找到有關如何安裝,下載和使用這些程序的大量信息。
您要做的第一件事是更改 config.h 文件GRBL庫:
使用Notepad ++下載GRBL v1.1 open config.h后(您可以在GRBL目錄中找到 config.h )
找到你在 pic上看到的行。 1,2和3 并根據圖片的右側部分更改它們(在圖片左側看到原始線條和右側更改的圖片)
保存文件
現在將GRBL庫加載到Arduino nano控制器中:
將Arduino連接到電腦
啟動Arduino程序
選擇草圖
選擇導入庫
選擇添加庫
轉到GRBL所在的目錄,然后在GRBL目錄(更改config.h文件的目錄)上單擊( not open )
單擊打開
忽略未解決的bla bla bla消息并關閉Arduino程序
轉到。.. GRBL/examples/grblUpload 目錄然后啟動 grblUpload.ino
現在Arduino程序啟動并開始編譯。完成后,忽略太少的內存空間消息并關閉Arduino程序。
在此階段,Arduino板上裝有GRBL,并且Homing和限位開關的設置正確。/p》
現在你必須讓Arduino板上的GRBL知道你的雕刻師需要什么樣的速度,尺寸等等。
將你的Arduino連接到你的電腦
啟動 laserGRBL.exe
點擊連接按鈕(波特率字段旁邊)
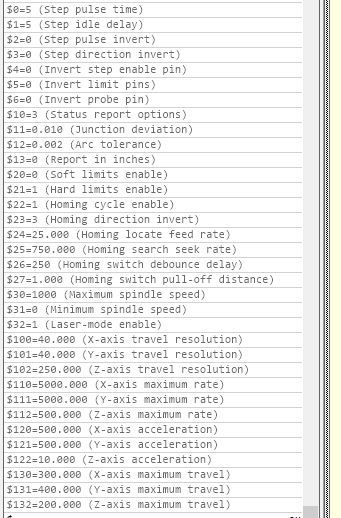
類型發送命令字段中的$$ (在進度字段下方)并按[Enter]
根據 pic上的列表更改值。 4 即可。只需在發送命令字段中輸入必須更改的行(在進度字段下方)。例如:鍵入$ 100 = 40 [Enter]
對要更改的所有行重復此操作。
之后你可以再次輸入$$來查看或所有機會都是正確的
當你執行testrun時,見下文,你還需要調整數量轉向電機的電流。您可以在兩個踏板上轉動小修剪器來做到這一點,但在此之前斷開電路板的電源。 下載并閱讀踏板數據表!逐步調整修剪器,直到電機平穩運行并且不會松動一個步驟。我的電路板上的修剪器大約向右轉3/4。
現在你可以測試雕刻師看到或所有的動作是否正常,非常重要!,如果限位開關正常工作。如果激活限位開關,機器將進入錯誤狀態。在laserGRBL中你可以閱讀如何解決基于軟件的,$ x或類似的東西,現在電機釋放開關派上用場:在錯誤狀態下,其中一個開關仍然可以激活,現在按下電動機釋放開關,將所需的滑架從開關上拉一下,將其松開。現在您可以“重置”和“歸位”機器。
基本上您已準備好進行第一次校準運行。
步驟13:校準
以下程序是我的“快速,骯臟和便宜的激光雕刻機”的一部分的摘錄,可以指導并且可以如果您的雕刻輸出測量值存在偏差,請提供幫助。
“對于100美元(x,步長/mm)和101美元(y,步長/mm)的校準,我做了以下:
我為100美元和101美元填寫了價值80左右
然后我畫了一個給定尺寸的正方形,比如在Inkscape中說25毫米并開始雕刻**
第一個結果不應是尺寸合適的正方形,25x25mm。
從x軸開始:
讓我們說 A 是100美元的值, B 是$ 100(80)的值, C 是Inkscape(25)中的值, D 是您在雕刻方塊上測量的值(40 o r so)
然后 A = Bx(C/D)
在此示例中,$ 100的新值( A )是80x(25/40)= 80x0,625 = 50
你可以用y軸($ 101)做同樣的事情。
結果相當準確。如果你在x軸和y軸上使用完全相同的電機,皮帶和皮帶輪,那么$ 100和$ 101的值應該是相同的。“
**如果在Inkscape中制作校準方塊,請使用 JTP激光工具V1.8 插件制作一個(矢量)Gcode文件,你可以加載到laserGRBL。確保你填寫M04開啟,M05關閉激光器在 JTP激光工具V1.8 插件!
步驟14:準備好了!
如果一切正常,你現在已經雕刻了一個大小正好為25毫米的正方形。
現在你可以雕刻/剪切你喜歡的任何東西:灰度圖片,矢量圖,圖案到切割等。準確度很高!
pic.1 ,底部字符非常小(標尺上兩條線之間的距離為1mm)
pic.2,一些首次灰度結果。
PIC。 3 ,非常準確!
視頻顯示雕刻工作。
步驟15:最后一步
現在一切正常,您可以從電纜導軌和漂亮的PCB微調裝置開始。我已經創建了一些電纜導向架,可以打印并用于連接電纜導向器(打印文件“LE3電纜安裝座和PCB安裝架”)。
如果您確實使用了電纜導管,那么1米長的電機電纜不夠長,您必須購買更長的電纜或制作電纜延長線(這就是我所做的)。在圖片上,您可以看到我如何使用電纜導向器(和安裝座)。而且說實話,電纜引導使得雕刻變得更加容易,因為您不必擔心燒壞的電纜或部件之間卡住的電纜等。
-
激光雕刻機
+關注
關注
8文章
32瀏覽量
15105 -
3D打印
+關注
關注
26文章
3544瀏覽量
108866
發布評論請先 登錄
相關推薦
UV光固化技術在3D打印中的應用
激光3D打印設備的技術優勢
ARMxy嵌入式計算機:雕刻機自動化的新標準

全自動雕刻機:馬達驅動芯片MS3142S的應用案例

工業平板電腦雕刻機設備上的應用

桌面型激光雕刻機的發展前景及TMC應用優勢
深圳恒興隆機電|雕刻機電主軸導致容易損壞的原因.
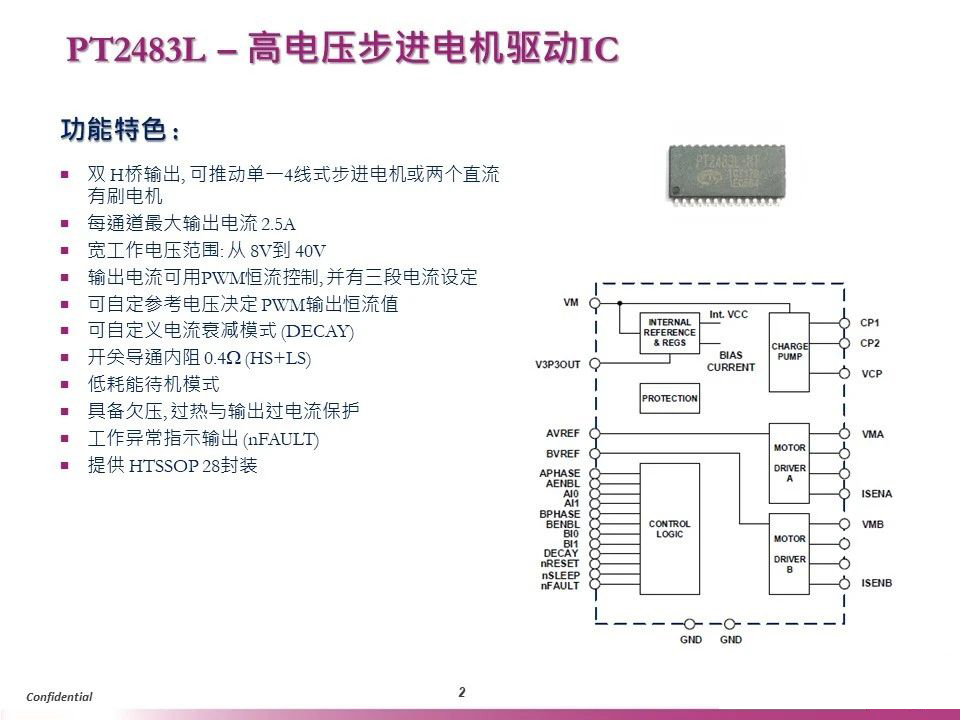
PT2483L – 高電壓步進電機驅動IC
CASAIM沙盤模型3D打印的優勢和應用

開源四軸協作機械臂ultraArm激光雕刻技術案例!






 工商網監
工商網監
評論