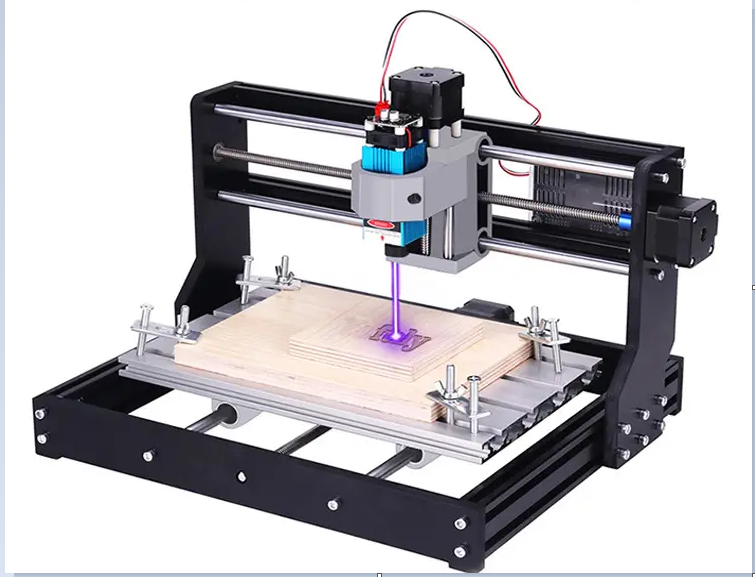
 激光雕刻機DIY圖解
激光雕刻機DIY圖解
步驟1:所需的零件/材料和工具
1x - GRBL shield v4(也可以使用其他版本)。
2x - A4988步進電機驅動器。
1x - 250 mw 650 nm激光可調鏡頭
12v 2-2.5 Amps電源。
男女標題。
1x - 47歐姆電阻。
1x-100k歐姆電阻器。
一些釹磁鐵。
亞克力板。
M3螺釘和螺母。
激光防護眼鏡。
1x - Arduino Nano。
工具要求:
鉆孔機。
熱膠槍。
鋸切丙烯酸。
完成文件。
桌虎鉗。
螺絲刀菲利普斯頭和平頭。
烙鐵。
第2步:挽救步進機械和釹磁鐵。
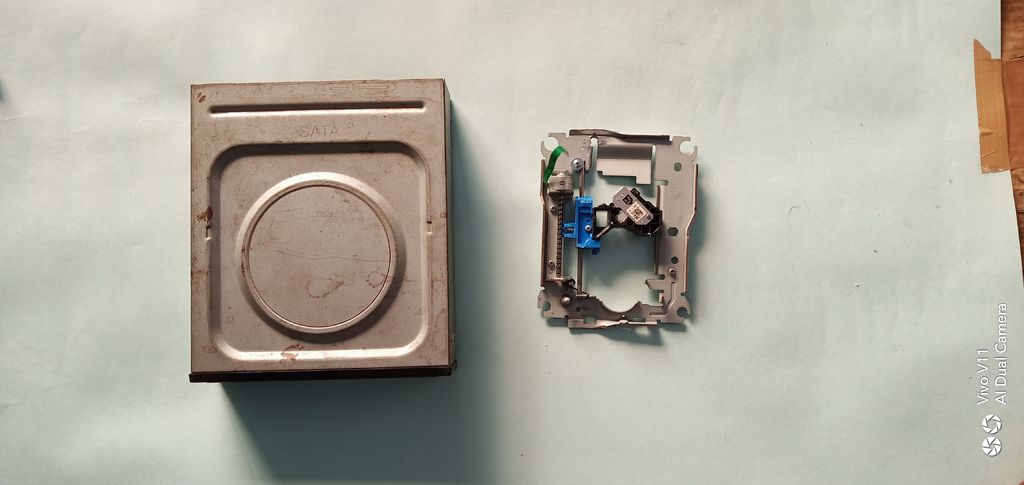
x軸和y軸分別需要兩個步進機構,可以從兩個使用過的DVD驅動器中回收。挽救步進機構和釹磁鐵相當容易。您可以使用飛利浦頭螺絲刀打開CD驅動程序輕松打撈。
確保在從DVD驅動器中挽救所需部件時不會損壞與項目相關的任何部件。
如果您不熟悉鋤頭這樣做,我會留下一個鏈接YouTube視頻,展示如何搶救各個部分。
步驟3:為機器制作基礎。





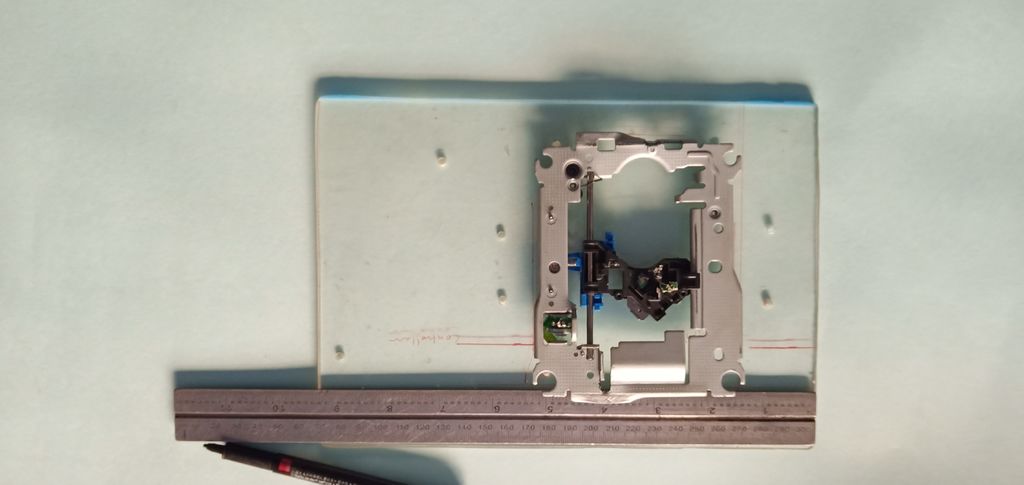


為了制作底座我使用的是4mm透明亞克力板。丙烯酸板的尺寸約為9英寸×6.6英寸。
現在我們必須創建我們的支架,用這個丙烯酸底座安裝y軸。
從頂部留出1英寸,從側面留下1.5英寸,并將步進機構放在底座上。現在標記相應的孔并鉆孔,以便累積y軸步進機構。
這些測量并不重要。你可以根據自己的需要使用自己的空間。
此外,我還為此基座配備了4個硅橡膠墊,使基座在地面或任何位置都能保持牢固。
步驟4:識別步進線圈和接線。




DVD步進電機是雙極步進電機,由兩個線圈和四根電線組成。
我們需要識別線圈1和2的導線。
為了識別步進電機線圈,我們使用連續性測試儀,它將向我們展示兩根導線的光線正在考慮中相同的線圈。
根據我們的grbl盾牌,有四個公頭,其接線如下。
1A 1B 2B 2A
這表明1A&圖1B所示的線圈是線圈1和2A和2A的一部分。 2B是第二個線圈的一部分。
注意 - 給出了每個過程的圖像,因此請務必仔細查看它,這樣可以更容易理解。
第5步:制作主雕刻平臺。














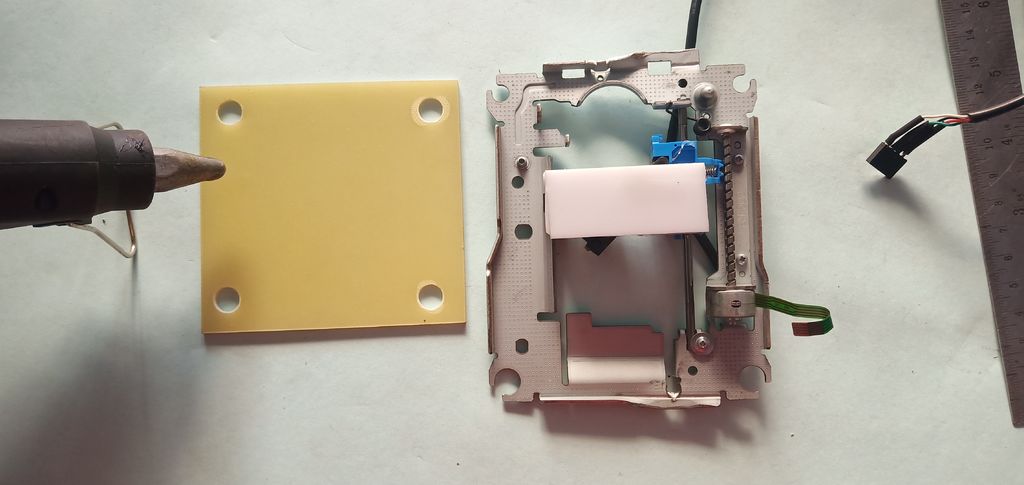
為了制作雕刻平臺我要去使用一些尺寸為40mmx22.5mm的2mm薄亞克力板件。
我將使用與上述尺寸相似的樹木,這樣我就可以創造6毫米的高度。
現在使用一些熱膠將這些碎片一個接一個地放在另一個上面。
一旦整個東西被粘上,它就需要連接到步進驅動機構的底座上。
這可確保步進驅動程序機制與我們將要安裝的基礎平臺之間有足夠的空間。
對于男人
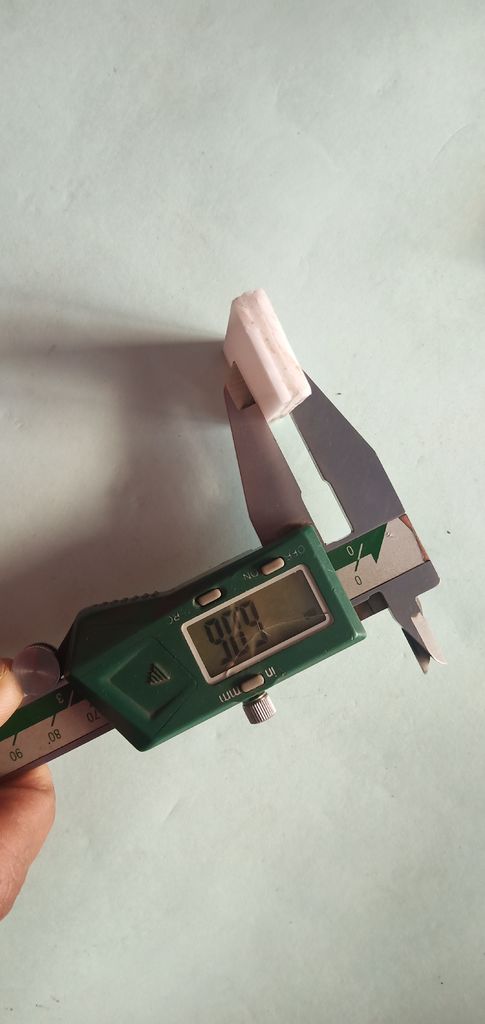
步驟6:為Y軸制作結構。







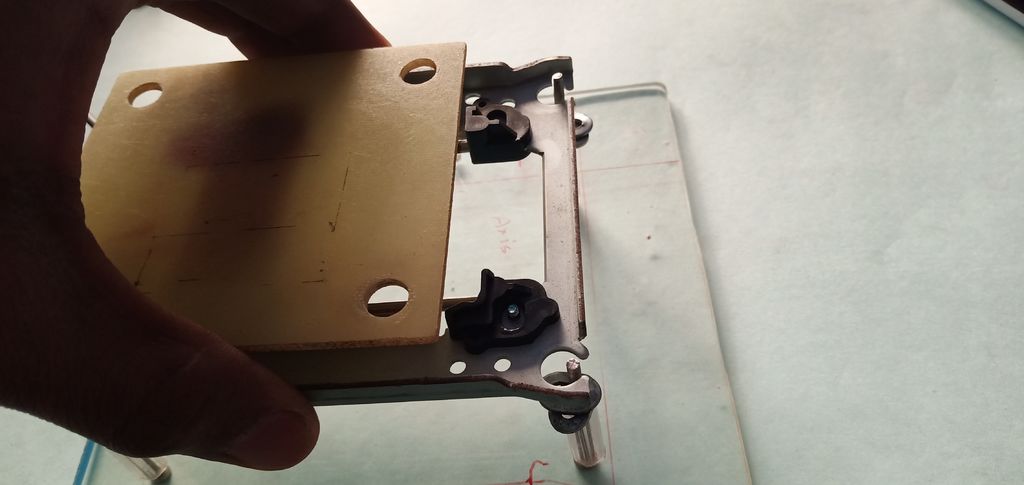
制作展位對于y軸并在機構和底座之間創造空間,我使用了四個墊片,這是通過使用刀片切割筆來制作的。我們需要的起搏器長度約為。 25毫米,足以在底座和機構之間留出足夠的空間。
現在使用m3螺絲從丙烯酸基底下面插入它們,如圖所示。
現在通過在機構上方和下方使用一些墊圈,使用螺母固定y軸步進機構
確保螺釘已正確固定
步驟7:為X軸制作結構。












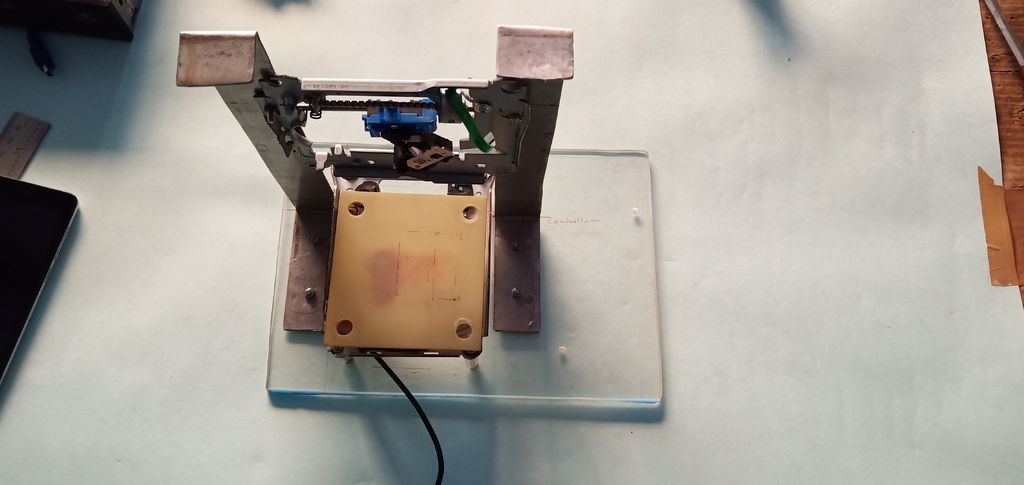
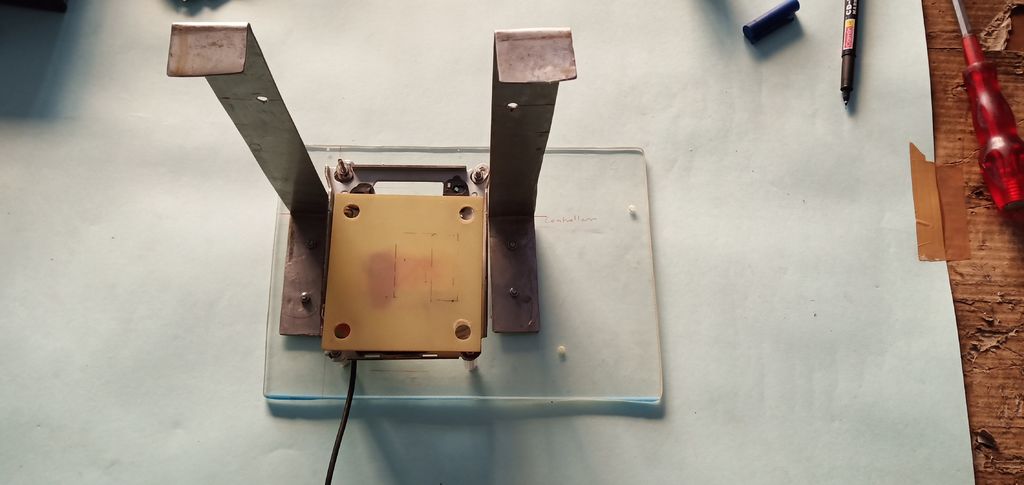


在makong學習y軸的基礎之后,它現在轉向制作X軸的主電源。
為了制作X軸的結構,我使用1.5毫米厚的金屬板。材料是不銹鋼。
你可以從廢料中獲得便宜貨。
您也可以使用其他材料,如鋁角等,它可以為您提供最好的資源。
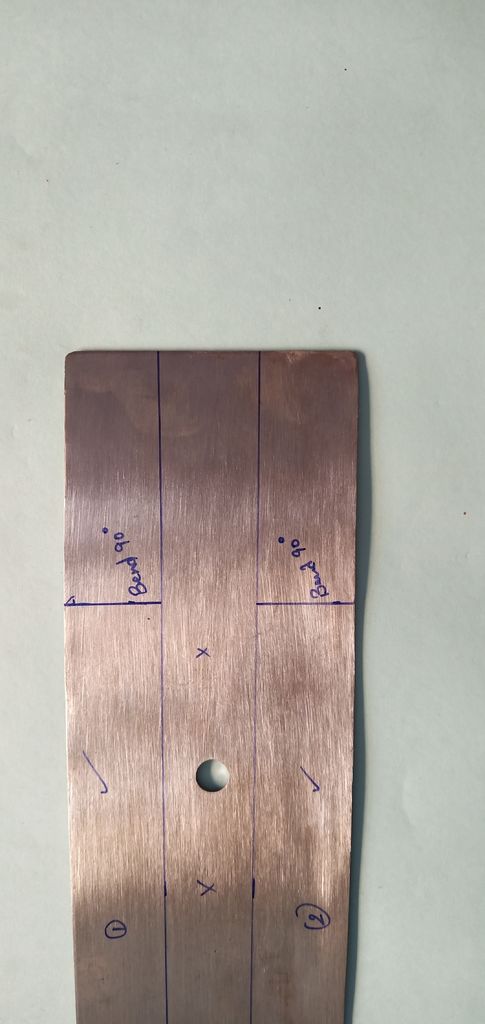
為了制作支架,我們將要求兩塊寬度為30毫米的鋼板價格。因此,通過使用可存儲的測量設備,我們將標記線。
在此之后,對于兩個鋼帶,我們需要將其彎曲90°,距離為80 mm。
現在只需切割這些條帶并將其彎曲90°
為了切割條帶,您可能需要一些工具,因此您需要一個良好的工作室否則你可以從擁有工作室的人那里獲得幫助。
切割后確保鋼板側面正確完成,確保不會傷到任何人。
對于彎曲條帶,您可以用臺鉗抓住工件,使用錘子可以將其彎曲90°
只需檢查彎曲是否正好是90°或不使用方形。
不正確的彎曲只會增加你的工作,所以這個過程應該是完美的。
步驟8:電子設備。












這是該項目最重要的部分。
為了運行機器,我們需要一個12v 2 - 2.5安培的電源。
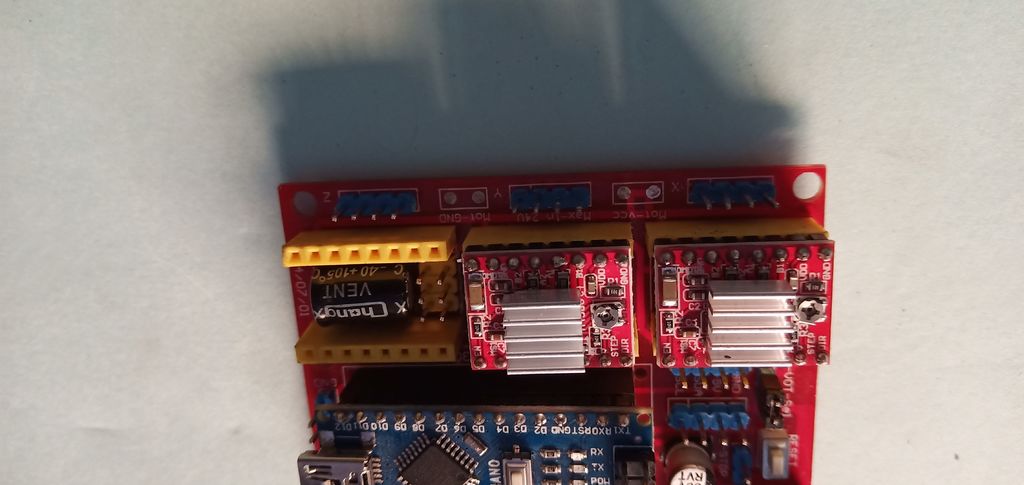
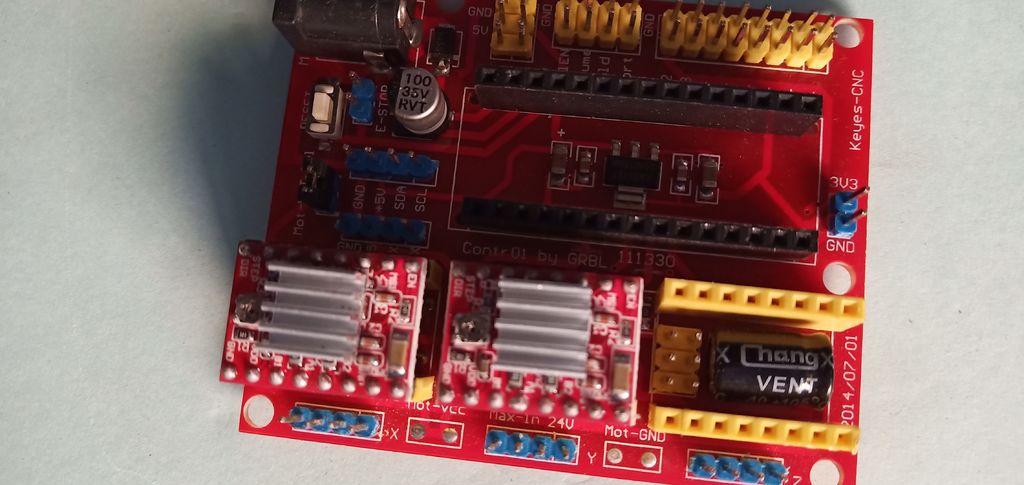
我們需要以正確的方式在CNC GRBL shield v4上設置Arduino Nano和2 A4988驅動程序,如圖所示。
如果對齊不正確并且提供電源,可能會損壞步進驅動器或微控制器。
在驅動器和Nano正確對齊后,我們需要將其與電源和電池連接起來,并測試軸是否在相應的方向上移動。
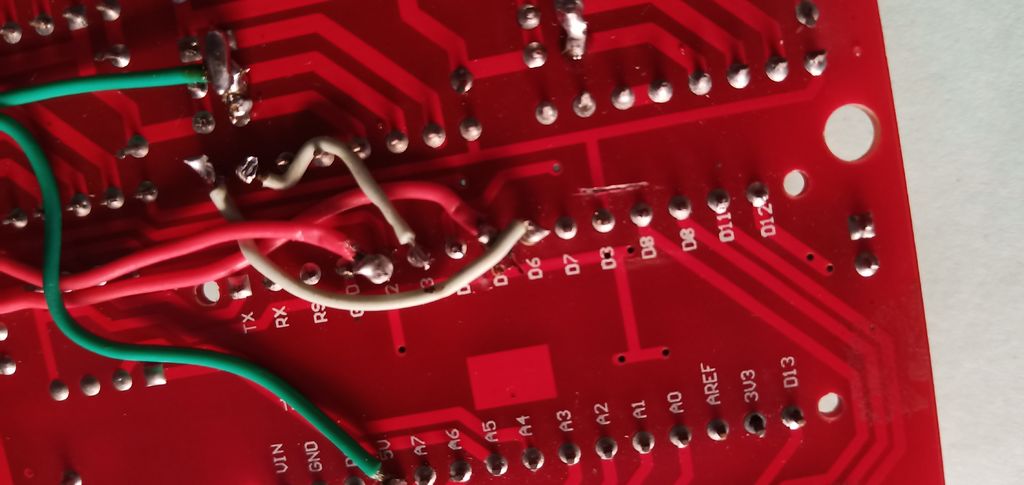
在我的情況下,當我嘗試屏蔽時沒有響應激光GRBL軟件的命令。
然后我參考了我在互聯網上找到的電路圖檢查了屏蔽上的連接。
注意 - 我的盾牌存在制造缺陷。為了糾正我和我的朋友盾做了同樣的事情,發現他也有同樣的問題。所以我再次分別焊接了X軸和Y軸的A4988的步進和方向引腳。
再次焊接步驟和方向引腳后,我能夠完美地運行x和y軸。
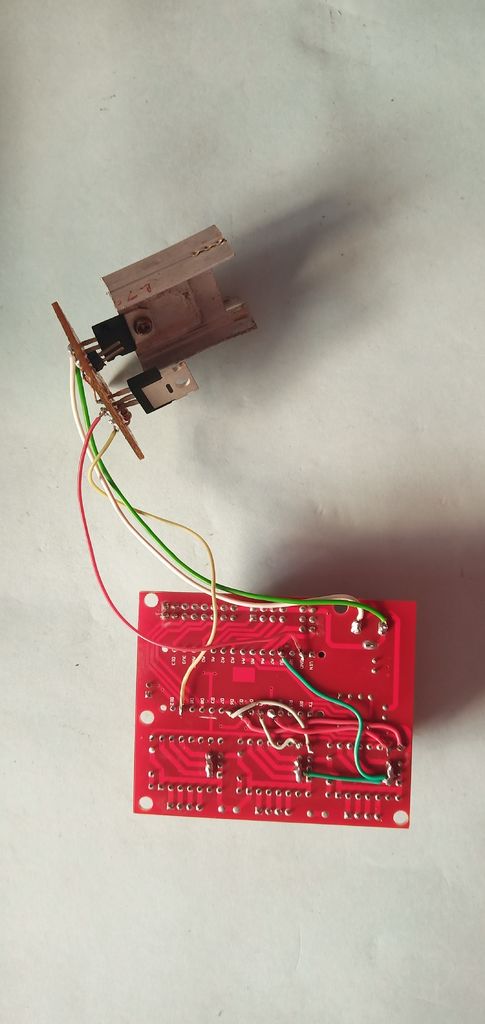
步驟9:激光切換電路原理圖。

使用n通道mosfet Irfz44切換激光。
arduino Nano的數字引腳11連接到通過使用原理圖中所示的電阻器來實現mosfet的柵極。
激光器工作電壓為5伏,因此LM7805電壓調節器用于提供電源。
步驟10:向基地添加橡膠塊。








為了使結構堅固,我們需要添加一些橡膠墊。
對于橡膠墊,我使用的是3.5毫米厚的硅橡膠片,并切割了四個直徑為20毫米的圓形橡膠墊。
現在我們需要將這些橡膠墊連接到我們機器的底座上。為了將其粘附到底座上,我們將使用合成橡膠粘合劑FEVIBOND。
粘合劑應均勻地附著在兩個表面上。涂上粘合劑后,將橡膠墊粘在底座上,讓其干燥至少30分鐘。
添加這些打擊墊不是必需的,但是當機器放在粗糙的表面上時它會有所幫助。
這也可以保護丙烯酸基底免受劃傷。
步驟11:步進電機校準和步長/毫米計算。

校準涉及步進電機的任何機器都需要進行一些計算。這些計算對于不同的步進電機是不同的。
因此您需要計算步進電機。
步長/mm =步進/旋轉*(a4988的微步進)
步數/轉數= 360/步進角度
對于我的步進電機,步數/轉= 192
因此,步長/mm = 192 * 1/16 = 12步數/mm。
現在可以在激光grbl軟件的grbl設置中添加此值。
步驟12:上傳GRBL庫和設置Up Laser GRBL。





上傳到ARDUINO -
為了讓這臺機器運行,我們需要將grbl庫上傳到Arduino。
下載后需要解壓縮文件。
解壓后需要將文件夾放在以下位置 - 程序文件 - 》 Arduino-》庫。將其粘貼到此位置。
現在打開Arduino ide并連接Arduino nano并選擇正確的端口。現在包括grbl庫并將其上傳到Arduino。
設置LASERGRBL軟件 -
打開LASERGRBL軟件并將Arduino連接到電腦。
確保選擇正確的波特率11500.
現在為電路提供12v 2.5安培電壓。給電源后,兩個步進電機都應鎖定,不應該是空閑的。
現在點擊“連接”按鈕。
現在單擊文件》打開文件》選擇要雕刻的文件》單擊確定。
現在您可以根據需要設置圖像。在我的情況下,我使用矢量化圖像并且不使用任何填充。
步驟13:將激光聚焦并開始雕刻。

現在我們需要使用一些熱膠將激光安裝在x軸上。
現在我們需要在我們之前創建的y平臺上保留激光下的工件。
現在我們慢慢地嘗試旋轉激光的鏡頭并嘗試使其成為更加聚焦的光束。
確保激光束的點應盡可能小。
一旦激光束聚焦到足以燃燒工件,你應該能夠看到一些煙霧,確保工件已開始燃燒。
如果您不確定,我已上傳了如何執行此操作的視頻。
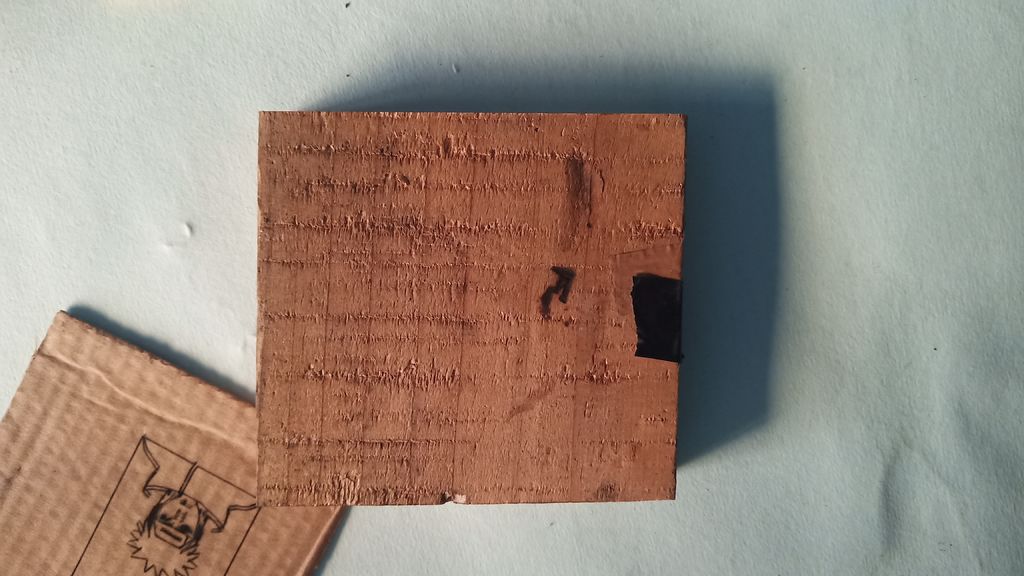
一旦完成這一步,我們終于開始雕刻我們想要的任何東西。
第一次雕刻我使用的是一些簡單幾何形狀的圖像,這些圖像將向我們展示機器的準確性。
經過一些雕刻和調整系統后,我終于得到了一些干凈準確的結果。
第14步:可雕刻的材料。


紙板。
硬板。
MDF。
Wood。
較弱的塑料。
可以切割的材料。
紙張。
乙烯基貼紙。
-
激光雕刻機
+關注
關注
8文章
32瀏覽量
15105
發布評論請先 登錄
相關推薦
ARMxy嵌入式計算機:雕刻機自動化的新標準

全自動雕刻機:馬達驅動芯片MS3142S的應用案例
SycoTec牙齒雕刻機電主軸:精雕細琢,成就完美義齒

得利捷固定式讀碼器讀取金屬表面激光雕刻DPM碼的優勢
工業平板電腦雕刻機設備上的應用

esp32無法燒錄github上的一個固件,為什么?
桌面型激光雕刻機的發展前景及TMC應用優勢
選擇PCB電路板雕刻機?這些技術參數你必須了解

深圳恒興隆機電|雕刻機電主軸導致容易損壞的原因.
雕刻主軸相關知識的總結分享!|深圳恒興隆機電a
扒一扒雕銑機、雕刻機和加工中心之間的區別


開源四軸協作機械臂ultraArm激光雕刻技術案例!






 工商網監
工商網監
評論