 Arduino雷達的制作教程
Arduino雷達的制作教程
組件
Arduino Board(我使用的是arduino Uno)
伺服電機(mg-996)
HC-SR04超聲波傳感器
面包板
跳線
步驟1:
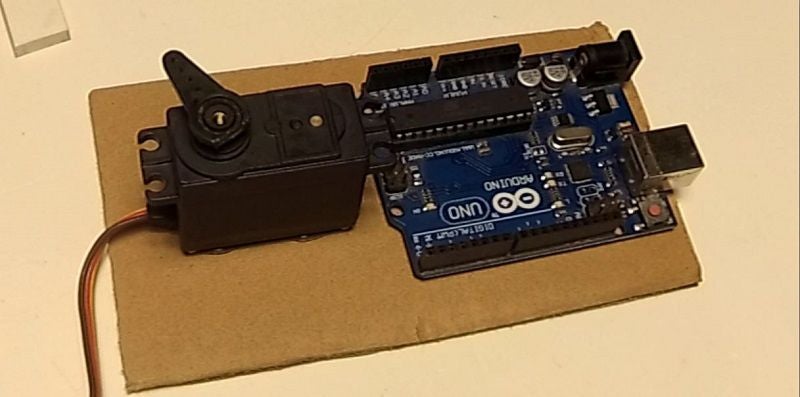
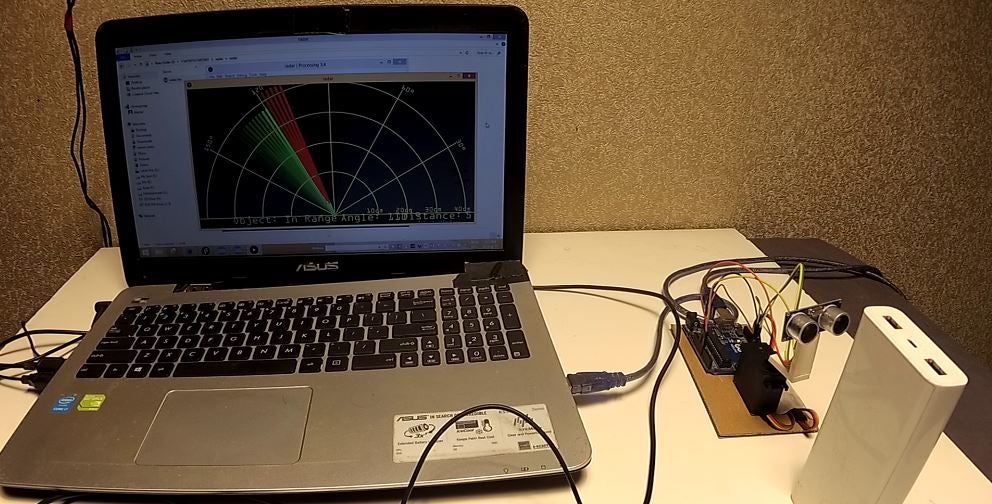
《首先,我們要切一塊卡板(15cm * 8cm)。然后,將arduino和伺服電機粘在上面。
步驟2:
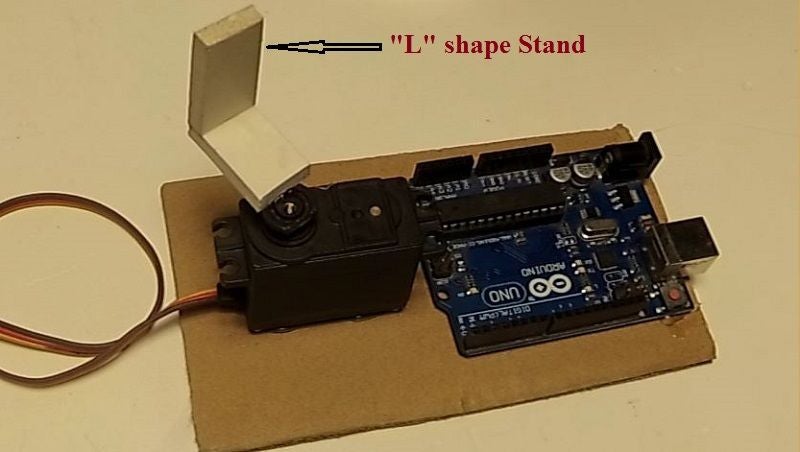
現在,我們必須制作一個“L”形支架用于超聲波傳感器(HC-SR04),使其保持在伺服電機上。
步驟3:
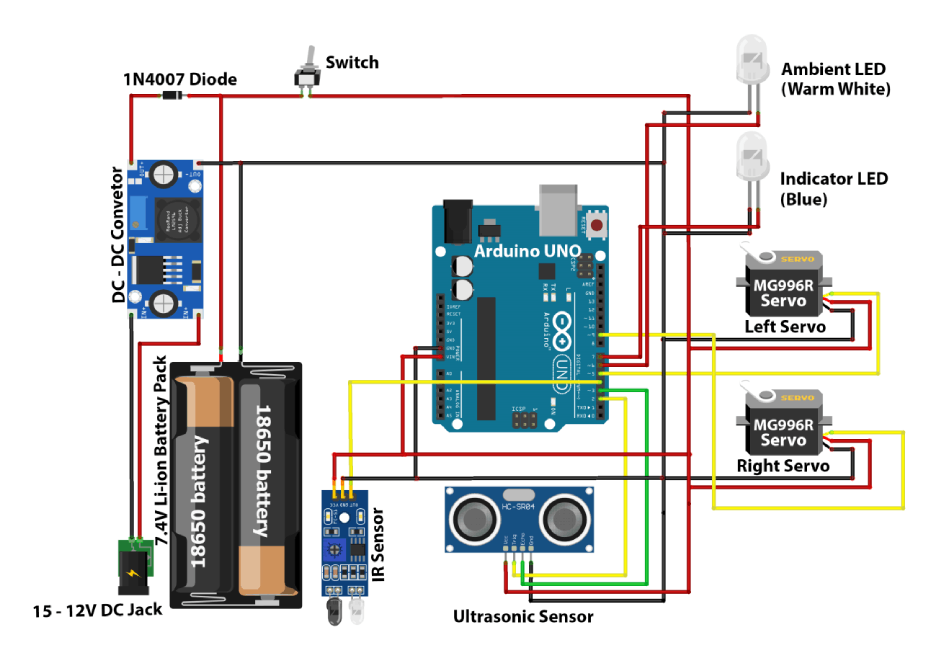
現在,我們必須將聲納傳感器連接到arduino。將傳感器的VCC和GND分別連接到arduino的5v和GND時要小心。之后,將trig引腳連接到8并將echo引腳連接到arduino的9。
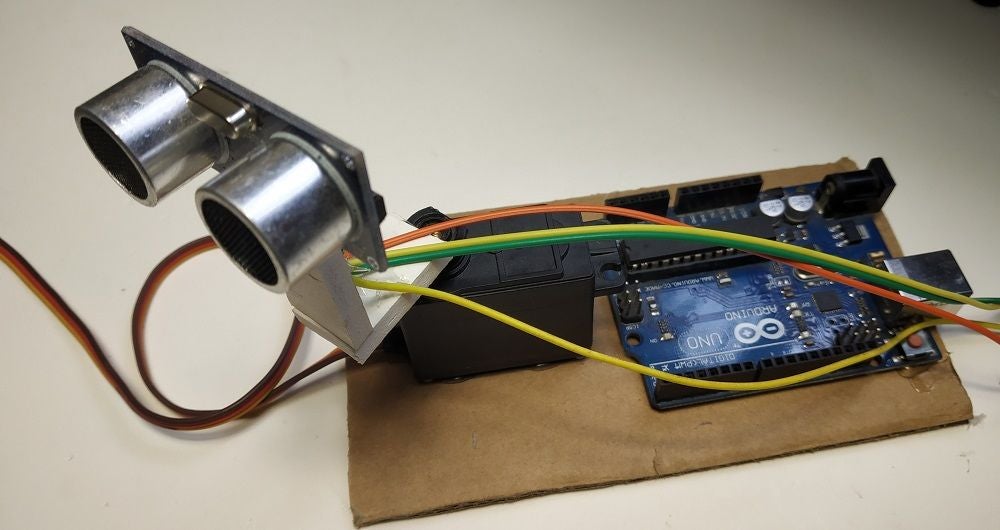
步驟4:
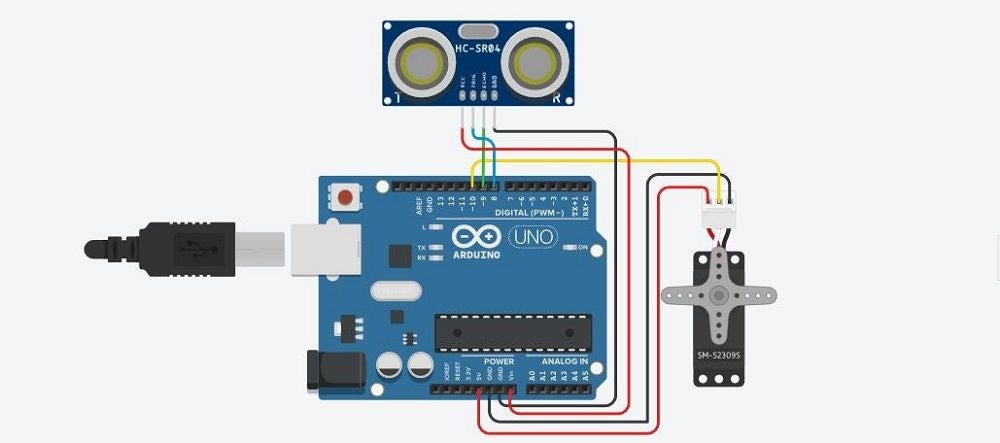
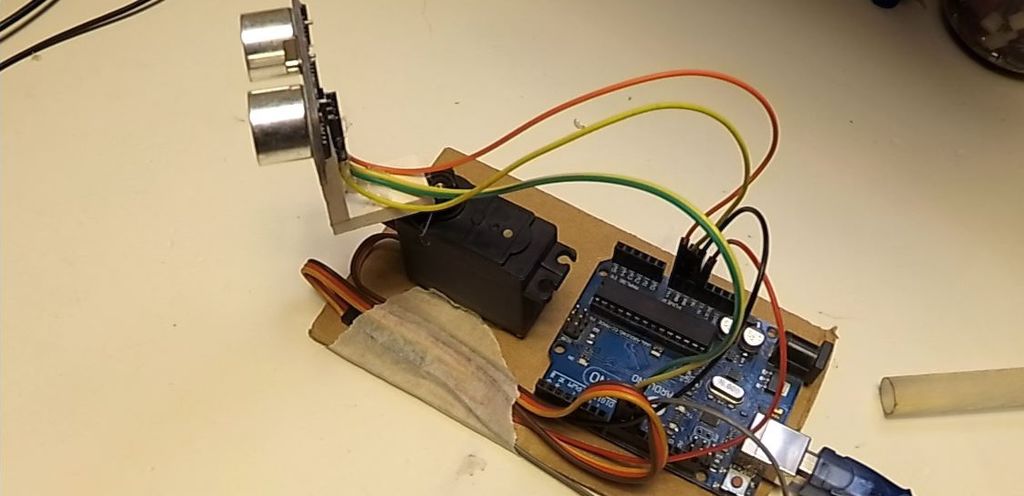
將傳感器連接到arduino后,是時候將伺服電機連接到它了。再次,要小心連接伺服電機的VCC和GND。將伺服信號連接到arduino的引腳10。
步驟5:Arduino雷達所需的軟件:
您將需要arduino IDE和Processing IDE來運行它雷達
項目。處理IDE將獲取從arduino發送的值并說明對象區域(紅色標記)。按照鏈接下載它們。
處理IDE:https://processing.org/download/support.html
Arduino IDE:https://www.arduino.cc/en/main/software
第6步:Arduino代碼:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startingAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
伺服電機;
void setup(void )
{pinMode(TriggerPin,OUTPUT);
pinMode(EchoPin,INPUT);
motor.attach(motorSignalPin);
Serial.begin(9600);
}
void loop(void)
{static int motorAngle = startingAngle;
static int motorRotateAmount = rotationSpeed;
motor.write(motorAngle);
延遲(10);
SerialOutput(motorAngle,CalculateDistance());
motorAngle + = motorRotateAmount;
if(motorAngle 《= minimumAngle || motorAngle》 = maximumAngle){motorRotateAmount = -motorRotateAmount;
}}
int CalculateDistance(void)
{digitalWrite(TriggerPin,HIGH);
delayMicroseconds(10);
digitalWrite(TriggerPin,LOW);
long duration = pulseIn(EchoPin,HIGH);
float distance = duration * 0.017F;
return int(distance);
}
void SerialOutput(const int angle,const int distance)
{
String angleString = String(angle);
String distanceString = String(distance);
Serial.println(angleString +“,”+ distanceString);
}
步驟7:處理IDE:
我們可以使用處理IDE輕松找到范圍(40 cm)內的任何對象。如果您的PC上沒有IDE,請下載它。
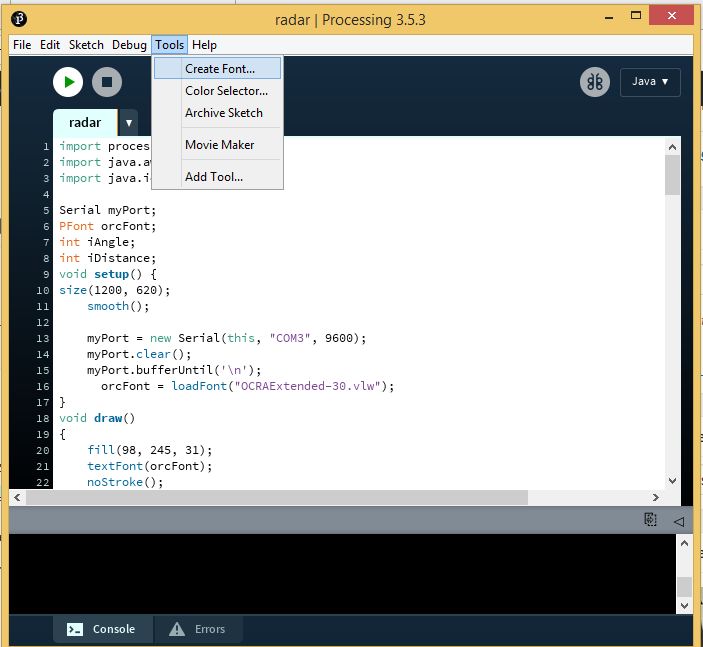
在使用此IDE之前,我們必須配置字體。
為此,我們必須安裝“OCRAEXT.TTF”文件位于Radar.zip。
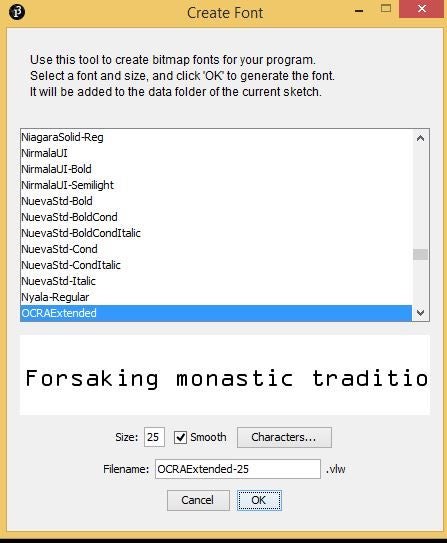
然后,轉到tools/create Font。從列表中選擇“OCRAExtended”,選擇字體大小25并單擊“確定”。
步驟8:
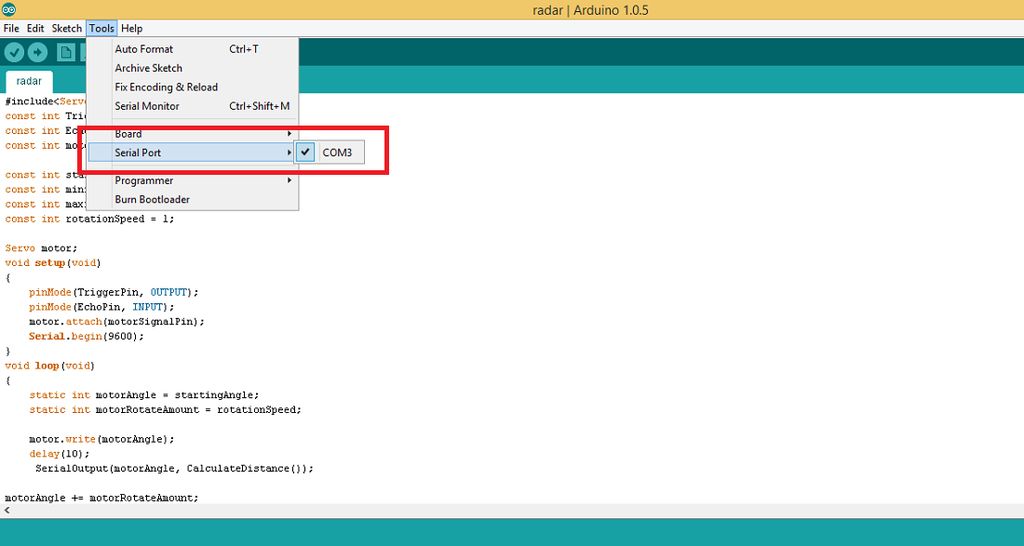
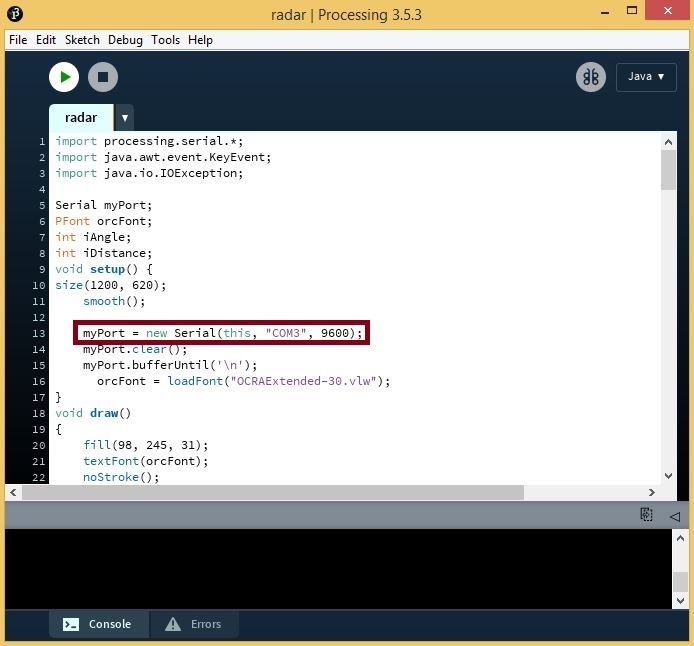
現在,我們必須找到COM端口號。轉到Arduino IDE并找到Com端口(照片中的COM3)。將COM端口號放在處理代碼的第13行(照片中的COM3)。
步驟9:最終
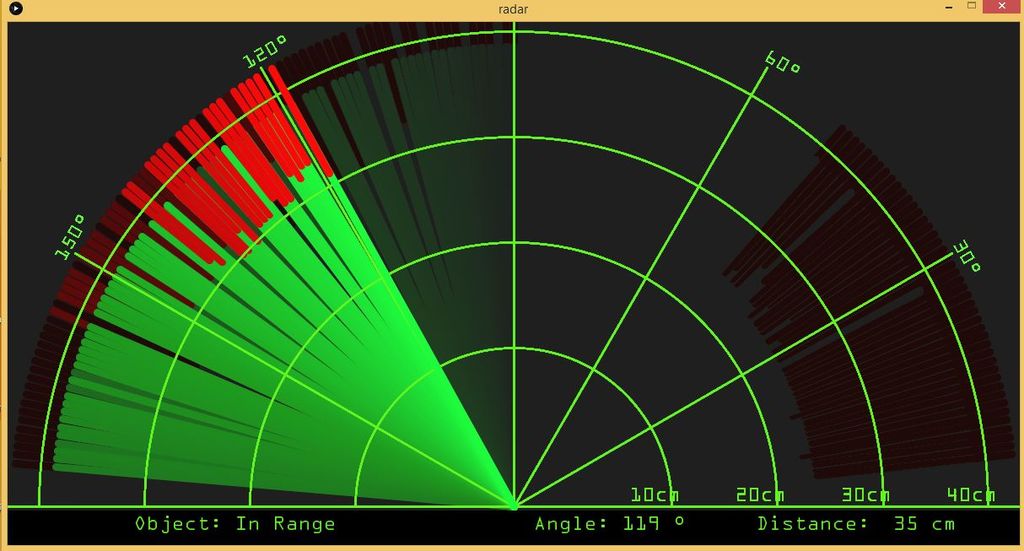
最后,按“運行”按鈕將顯示一個處理窗口。它將顯示雷達的伺服角度和物距。
-
雷達
+關注
關注
50文章
2901瀏覽量
117327 -
超聲波傳感器
+關注
關注
18文章
577瀏覽量
35900 -
Arduino
+關注
關注
187文章
6464瀏覽量
186651
發布評論請先 登錄
相關推薦
開源項目!基于 Arduino 的 MIDI 架子鼓
基于Arduino的串口通信項目
定華雷達儀表學堂:雷達液位計的導波管的使用注意事項
汽車雷達回波發生器的技術原理和應用場景
如何使用Arduino實現CAN總線通信
光學雷達和激光雷達的區別是什么
如何用Arduino制作一個簡易自動喂魚器
雷達檢測概率曲線的影響因素
如何制作自己的Arduino電容計

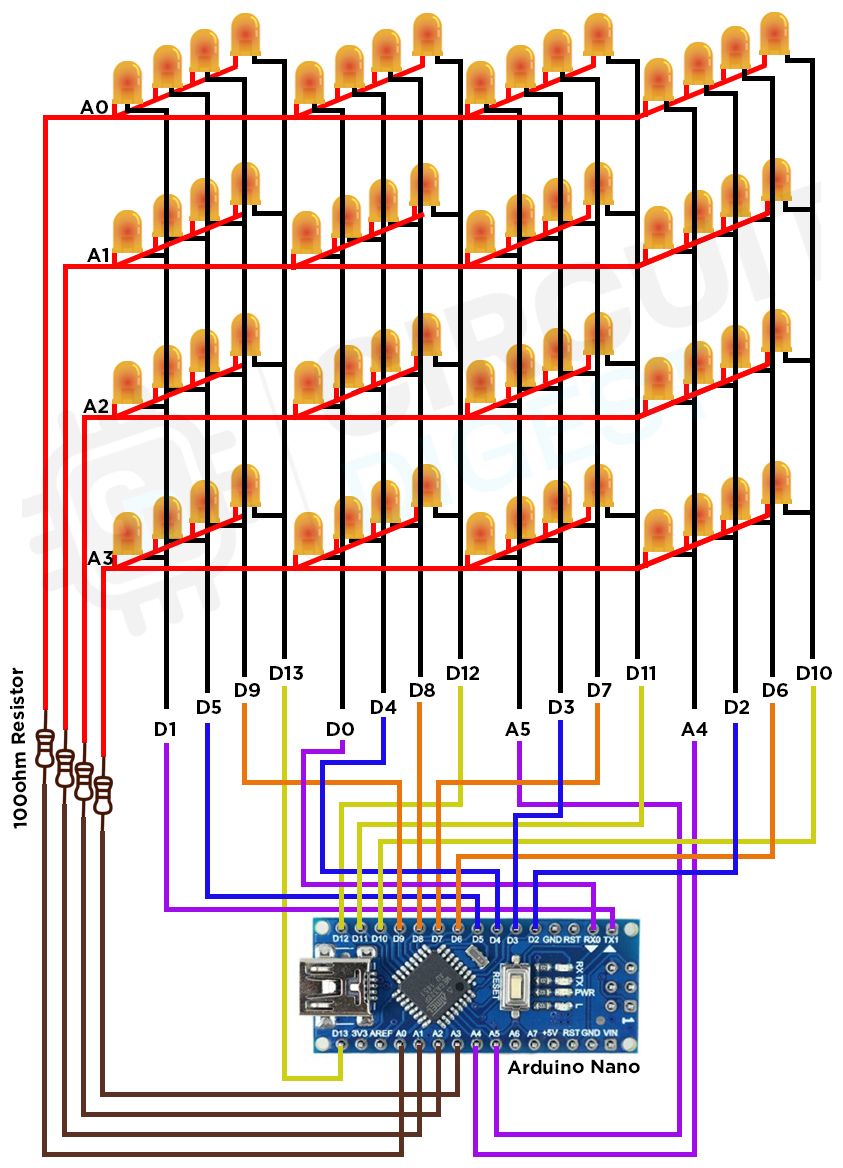
使用Arduino Nano制作一個4×4×4 LED立方體
2023年Arduino開放原碼報告:持續茁壯的Arduino生態系!






 工商網監
工商網監
評論