 基于ESP32的小型機器人制作圖解
基于ESP32的小型機器人制作圖解
步驟1:構建機箱
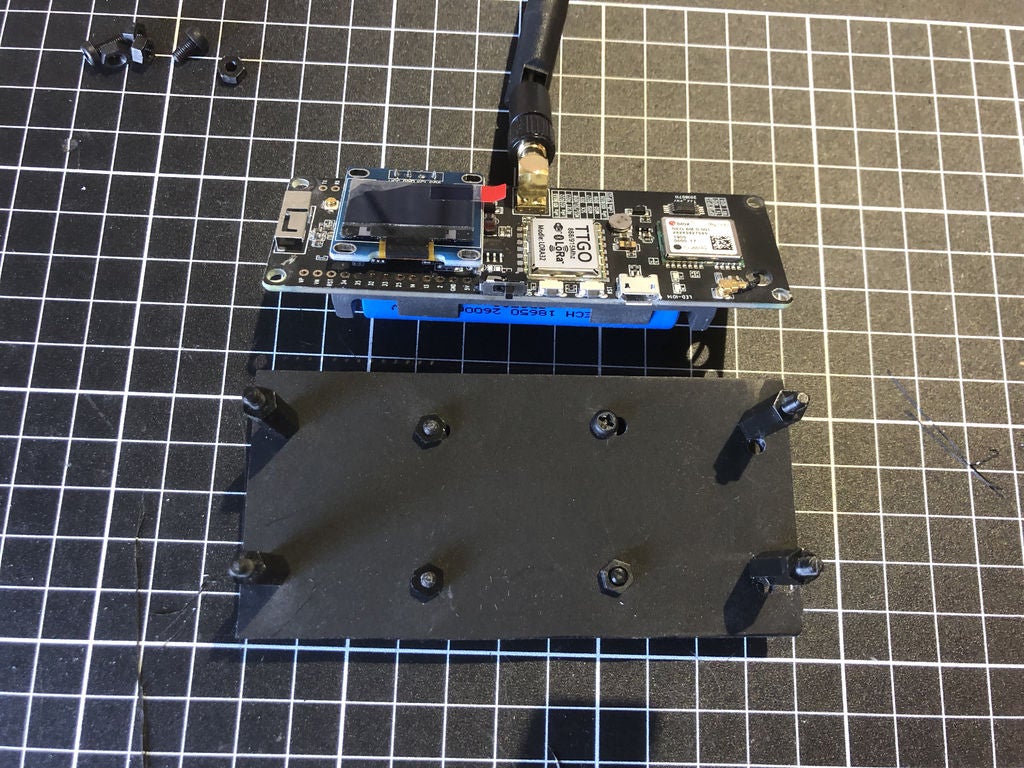
我想要一個真正的基本底盤,任何身體都可以使用一些有機玻璃或塑料,甚至可以使用舊的塑料飯盒或外賣。
我將一塊有機玻璃切成一塊比ESP32板寬一點,但長度大致相同,然后我標記在哪里我想添加4個孔來安裝ESP32使用電路板支架。
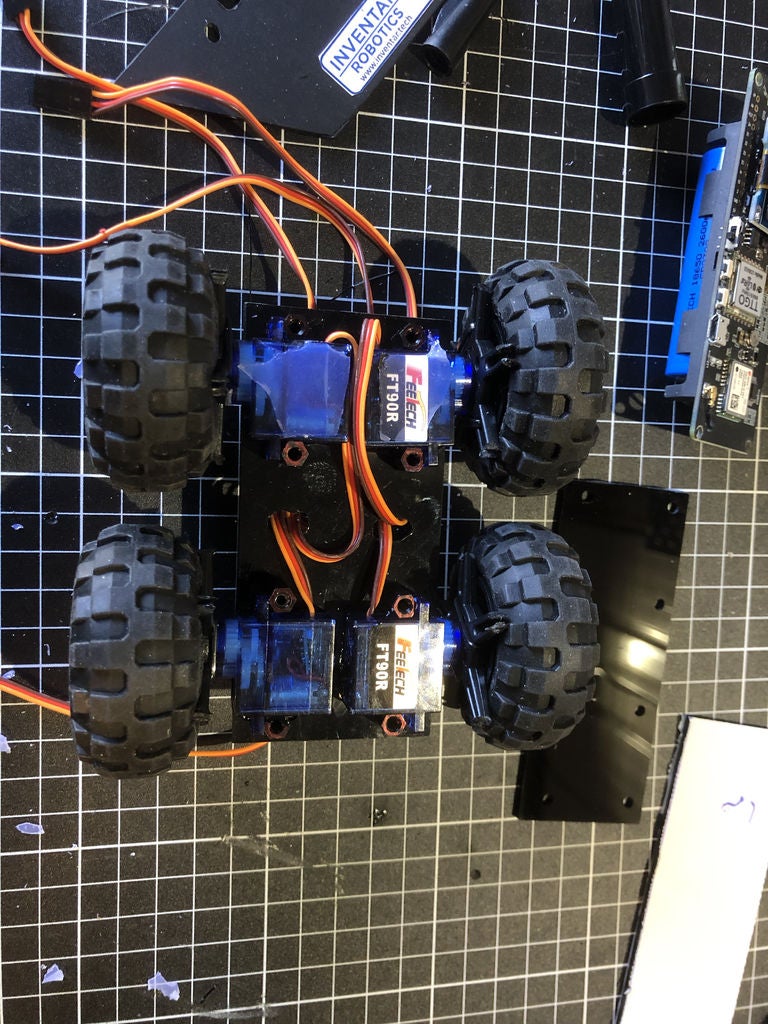
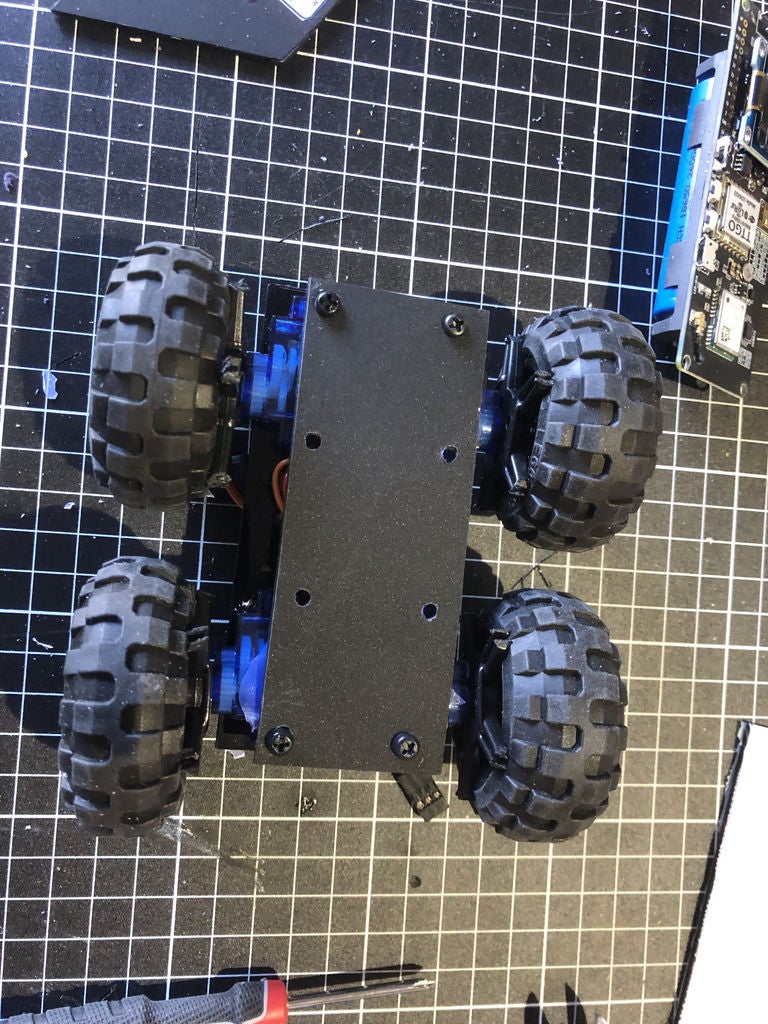
安裝舵機
我定位舵機以便它們所有都是以相同的方式定向,所以當接線時,它們將驅動相同的方向。我用了一些塑料膠把它們放在適當的位置并添加了一些支架來幫助它們固定。
我鉆了一些孔,讓伺服電線穿過機箱底部,這樣它們就可以插入我用過的小型veroboard,稍后我將詳細介紹。
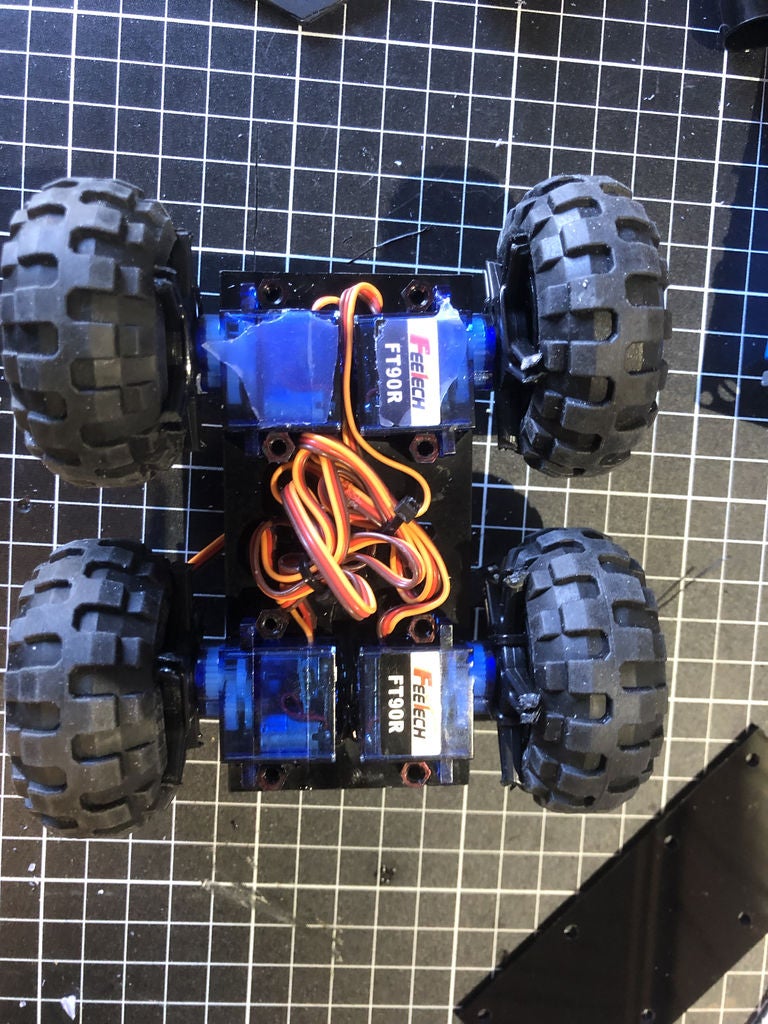
我盡可能地捆綁了伺服多余的接線,并使用了幾根小電纜扎帶將它們固定到位。
覆蓋所有接頭
作為最后一步,我用一塊與我剪下的第一塊相同尺寸的有機玻璃覆蓋了它。我為額外的支架鉆了孔,并添加了支架螺釘,將它們固定到位。
我很驚訝這個曾經在一起的重量是多少,比我前一周制作的馬達輕得多。
第二步:制作一個自定義的Veroboard
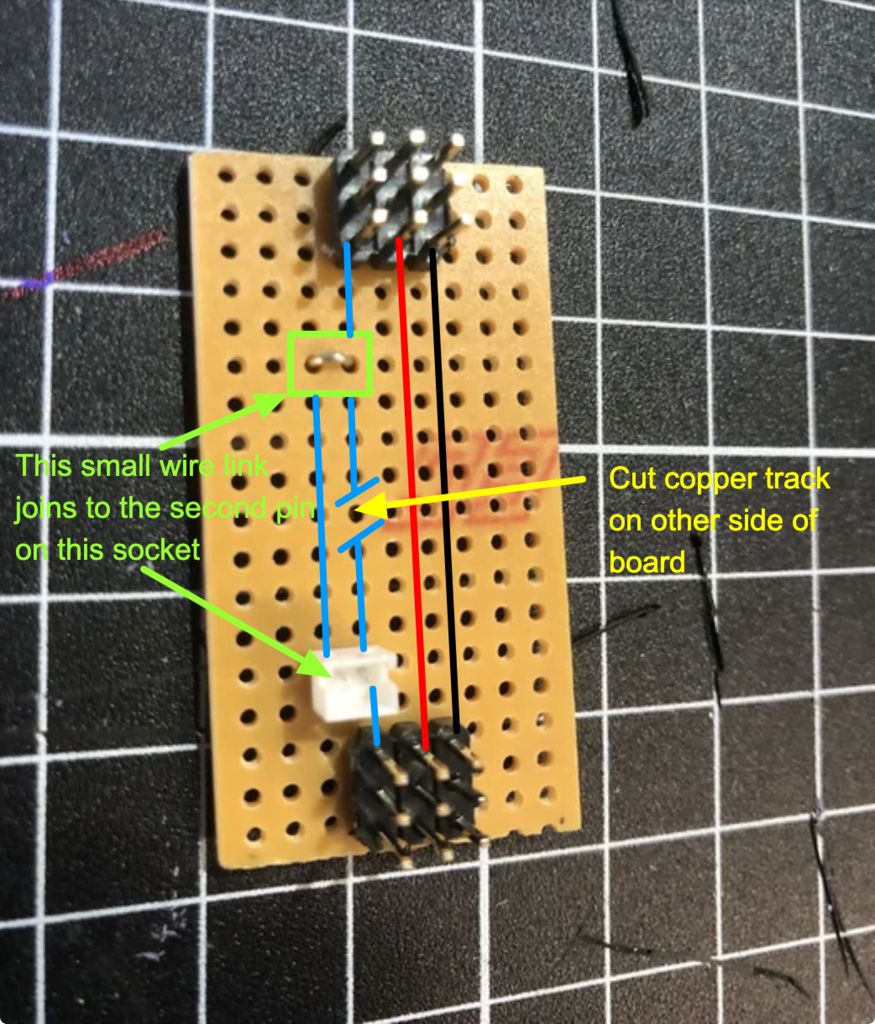
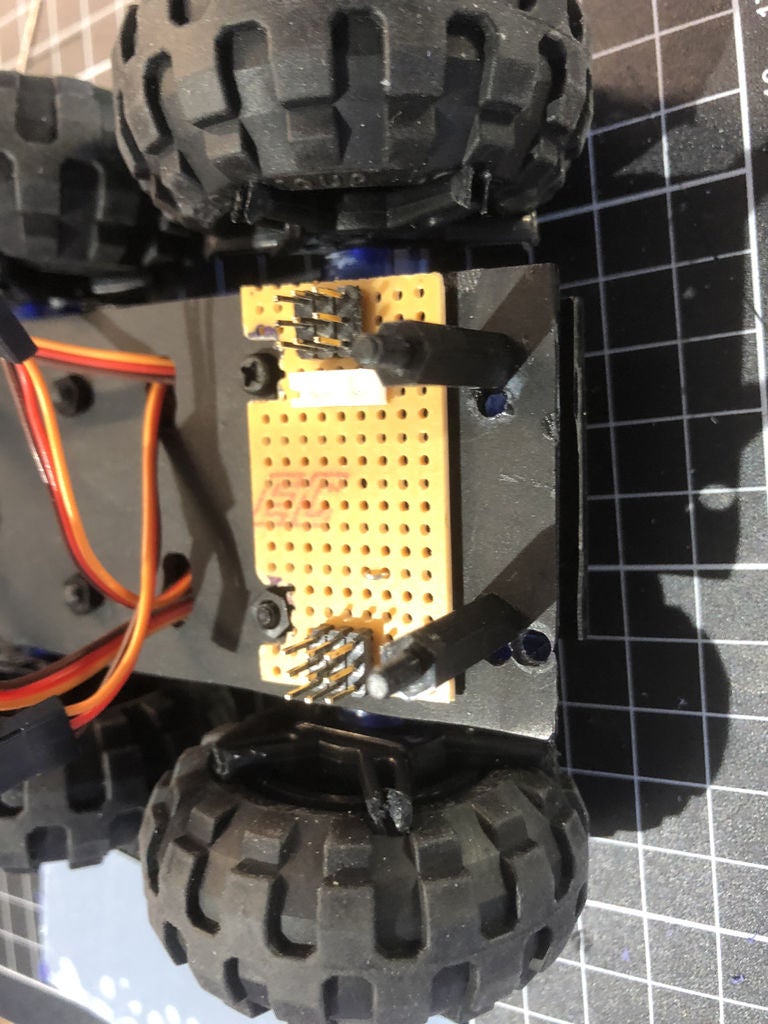
我想制作一塊小板,讓我插上我的ESP32進入電路板并在需要時易于拆卸。所以我在照片中創建了它,我添加了一些標題針,所以我可以插入Servos,然后插入一個neopixel strip。
我還添加了2個小jst插槽,我有一些所以我可以使用這些用于來自ESP32的電源,也用于提供伺服信號連接。
我切斷了電路板下面的一條銅軌,使每個伺服的信號引腳不同,然后我用一個小的電線連接器,通過電線將其移動一個軌道,這樣兩個第一個引腳就會連接一側或另一個。
因為車輛的每一側都有兩個伺服電機,所以我用電路板來將兩個伺服器彼此連接起來,這樣我就可以在每一側用單個伺服連接運行左側伺服器或右側伺服器。我在這里所做的就是將每一側的連接連接在一起,以簡化所需的接線數量。
我允許Vcc和GND連接通過銅軌道一直連接到veroboard,但是我切斷信號線,這樣我就可以控制我想獨立驅動的不同側面。
步驟3:布線
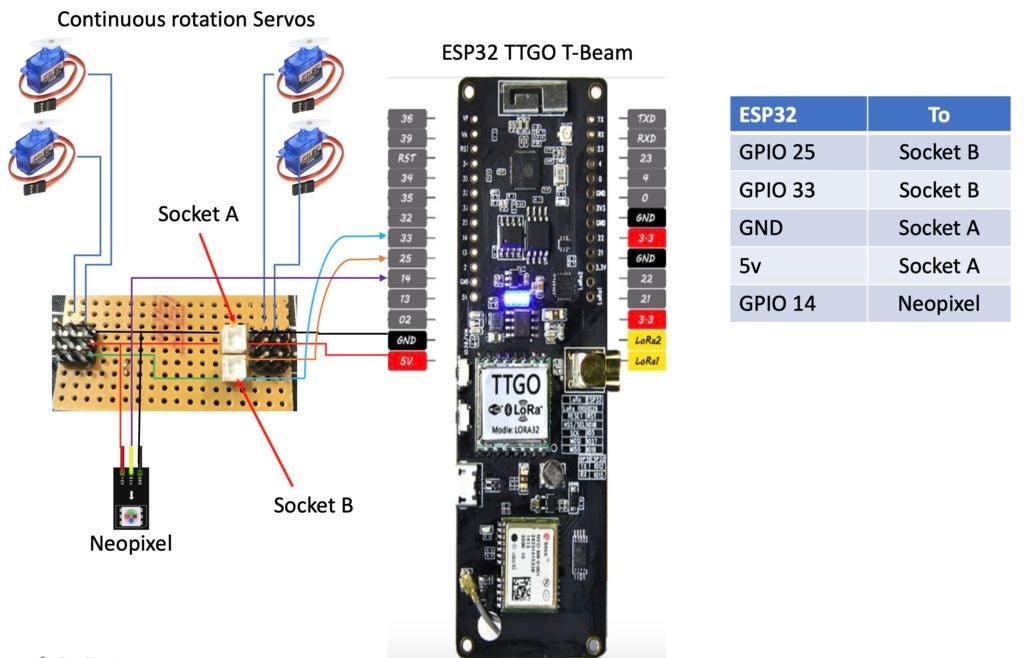
這里的接線圖顯示了連接以及如何盡可能少地連接Servos和Neopixel條。
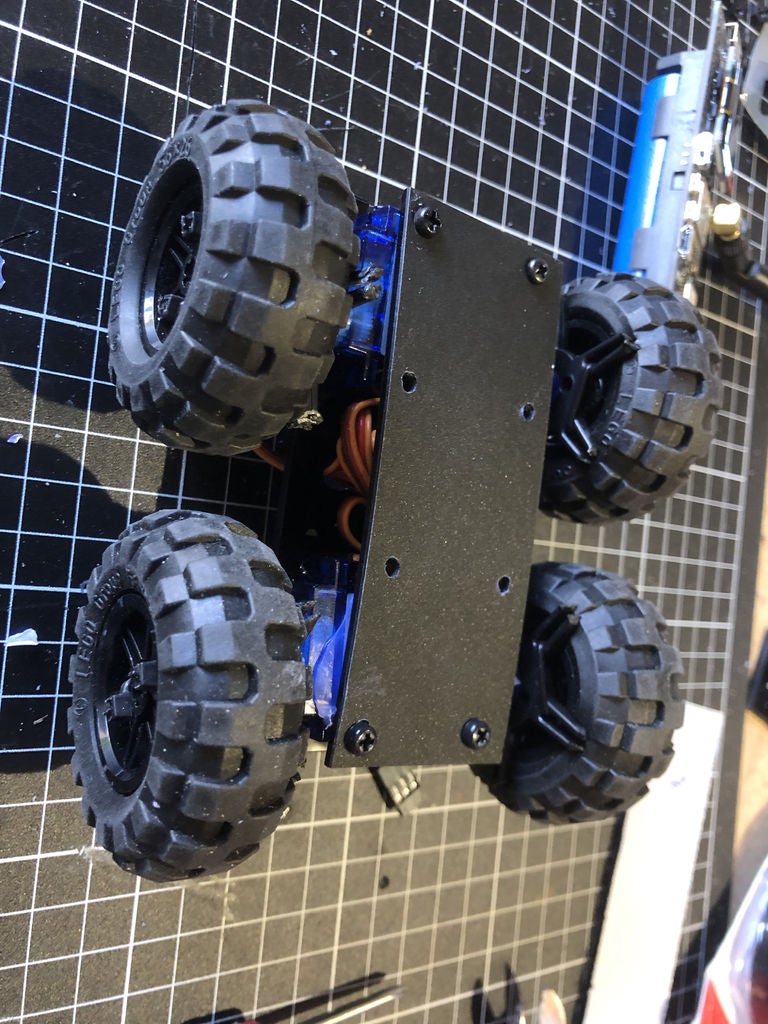
步驟4:全部放在一起

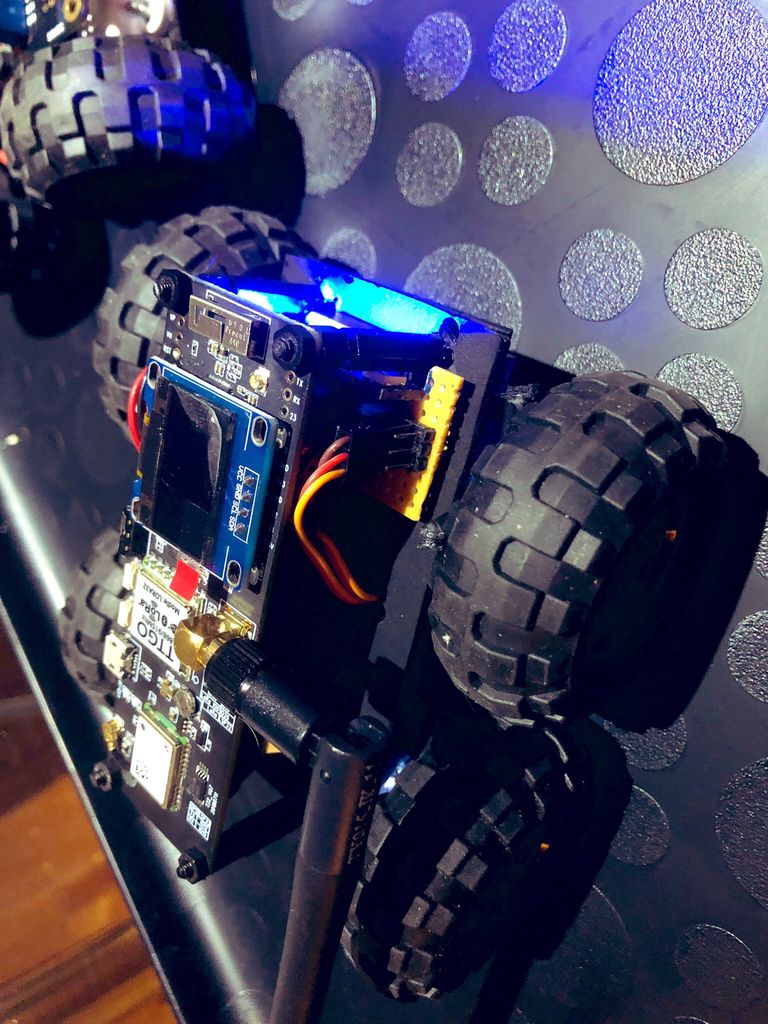
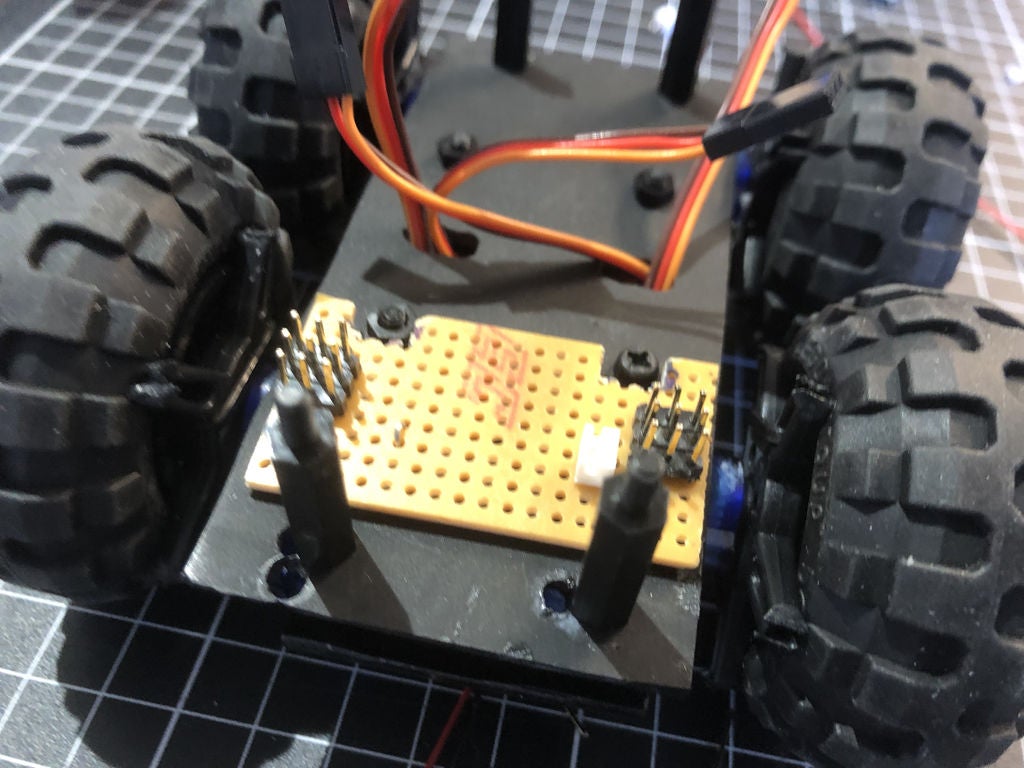
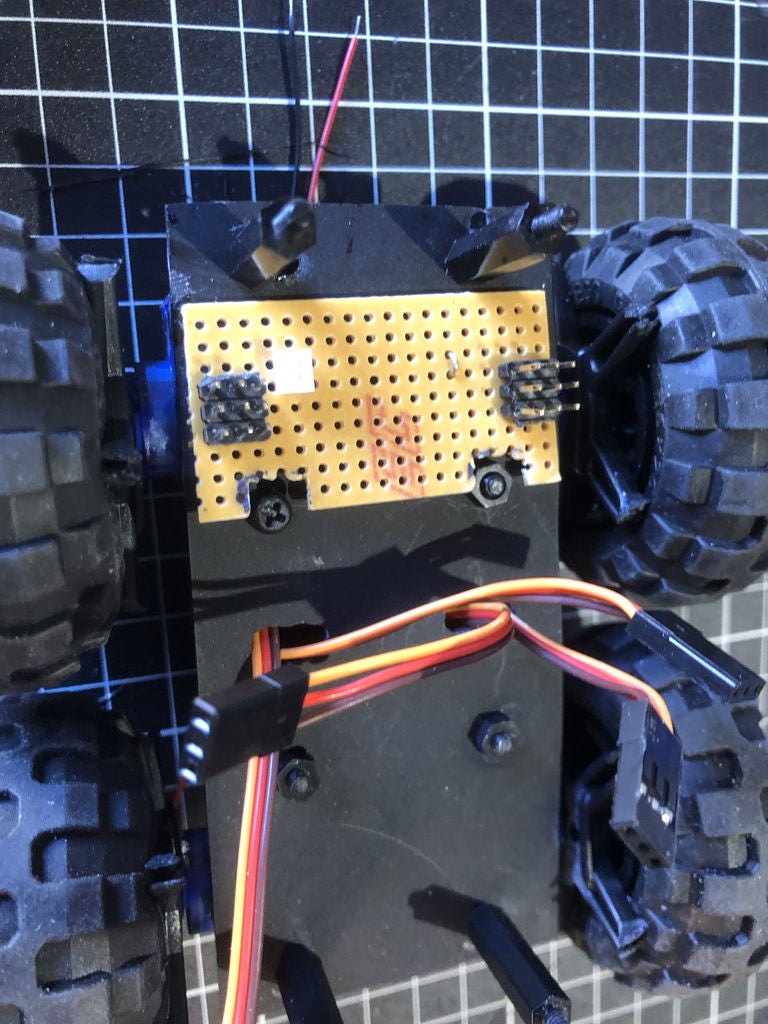
一旦我把所有東西都連接起來,我就安裝了自定義的veroboard,并將ESP32添加到底盤上,它們都很合適。
布線大多是隱藏和隱藏的,可以很容易地添加側面,并且頂部可以完全封閉ESP32。
步驟5:控制和測試


我想要一些簡單的控件,發現在網站https://r andomnerdtutorials.com/他們提供了一個很好的例子,說明如何運行網絡服務器并顯示控件,這樣你就可以讓機器人車開車了。我修改了示例以使用伺服器而不是電機,并添加了使用neopixel條帶的代碼,以及在Oled屏幕上顯示我需要連接的IP地址,以便我可以控制機器人。
第6步:ESP32的代碼
在這里,我附上了可以根據自己的目的進行修改的代碼,完全歸功于randomnerdtutorials,它構成了我擁有的基礎這里。我強烈建議購買他們在ESP32上的課程,它會帶你使用ESP32的許多復雜功能,以及一些非常好的示例項目。
-
機器人
+關注
關注
210文章
28231瀏覽量
206615 -
ESP32
+關注
關注
18文章
960瀏覽量
17114
發布評論請先 登錄
相關推薦
esp32上使用chatGPT做一些有意思的事情
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
esp32和esp8266代碼共用嗎
esp8266和esp32區別是什么
esp32用什么軟件編程
ESP32-WROOM-32E、ESP32-WROOM-32D、ESP32-WROOM-32U 有什么區別?ESP32-WROOM-32 后綴字母代表的意思是?

基于 ESP32 制造步行機器人,支持網絡圖像傳輸
ESP32能取代STM32嗎?哪個更好?

Al大模型機器人
ESP32-S3模組燒錄又失敗?分享怎么排查原因

DIY推薦!自制一個基于ESP32的沙畫機器人
【開源作品】基于樹莓派4B、ESP32制作的桌面機器人、氣象站、立方光!

ESP32-PICO系列技術規格書






 工商網監
工商網監
評論