 Arduino船型機器人的制作
Arduino船型機器人的制作
步驟1:零件
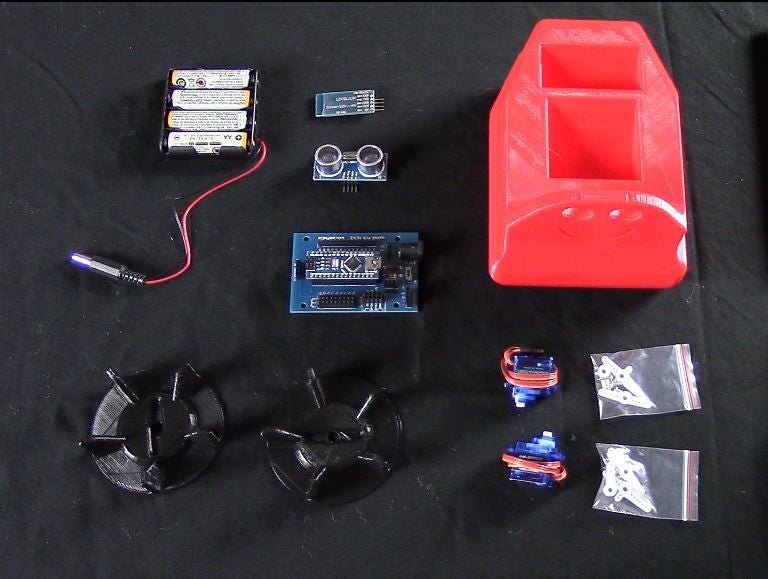
主要LittleBots Arduino Board
連續旋轉伺服系統
Arduino Nano
4x電池組
藍牙模塊
超聲波傳感器和4x跨接線
3D打印部件
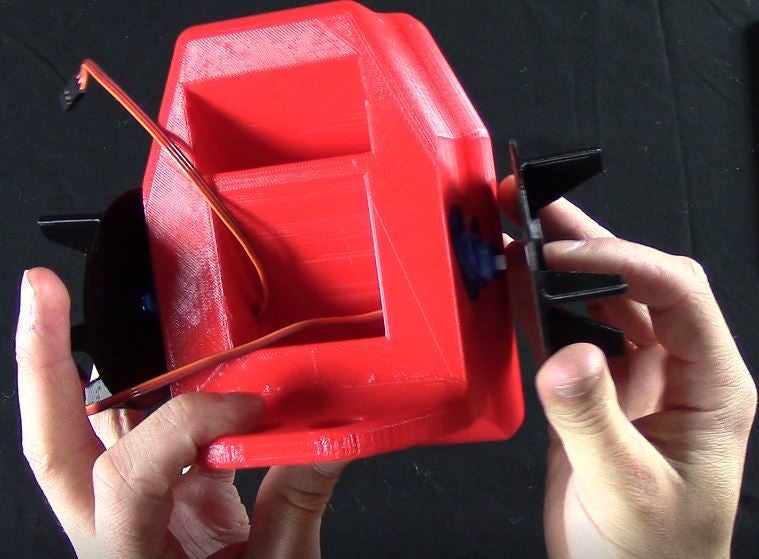
步驟2:插入舵機

將伺服插入每側的插槽中
確保銜鐵伺服電機在插槽中向下和向前移動,導線進入主體的電子部件隔間。
步驟3:連接槳輪


將兩個叉形伺服喇叭插入槳輪的插槽中。
將車輪和喇叭按到每個伺服電機的電樞上,并用伺服喇叭螺絲固定。
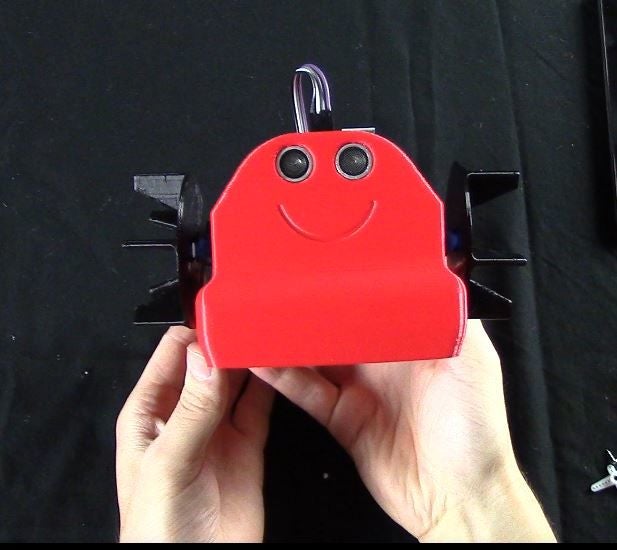
步驟4:插入超聲波傳感器



按超聲波傳感器進入主體的眼孔。
確保傳感器的引線或指向上方。
您也可以彎曲引線,使它們指向正后方。
步驟5:插入電池組

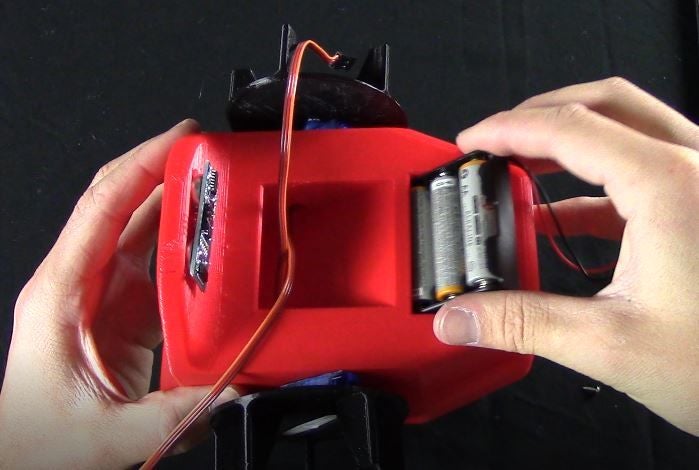
使用AA電池裝入電池
將電池組滑入Waterbot背面的插槽中
步驟6:將代碼上傳到Arduino。

從LittleBots網站的下載頁面獲取最新的Walter_OS或Waterbot Arduino Sketch。/li》
使用Arduino IDE,將草圖上傳到arduino Nano。
在連接藍牙模塊之前,請務必上傳代碼。藍牙和USB將相互干擾并產生錯誤的串行連接。
步驟7:準備主板
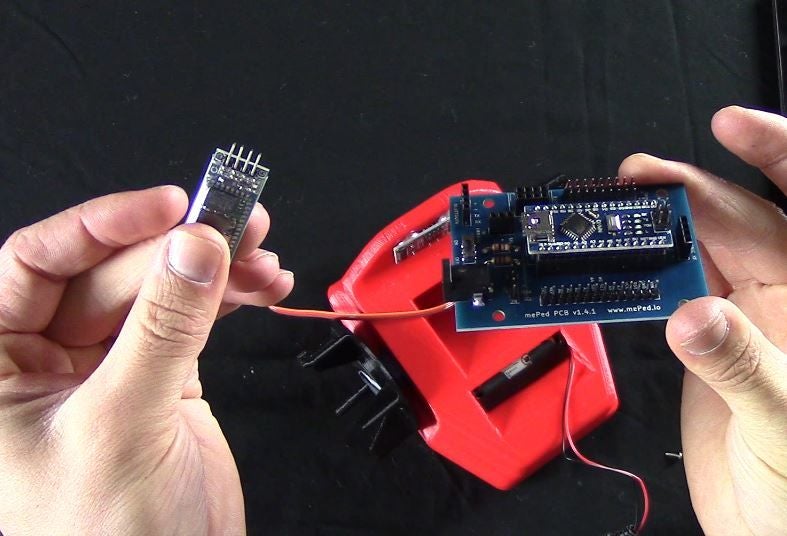



將Arduino Nano插入主板,使USB端口指向主電源開關
將藍牙模塊插入藍牙端口,如圖所示。標簽也印在電路板上供參考。
步驟8:插入主板


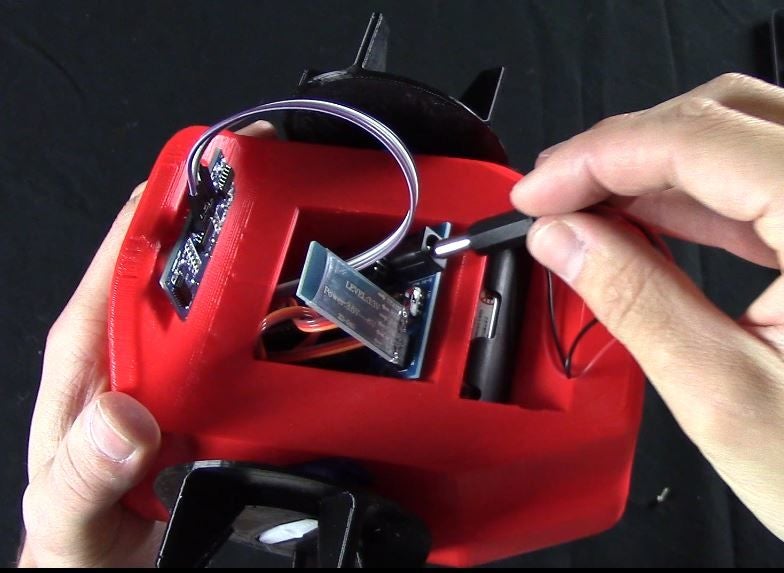
將超聲波傳感器連接到主板
將左右伺服引線連接到主板
將電路板滑入Waterbot上的前方電子設備隔間,使藍牙模塊從背面向外突出。
步驟9:享受
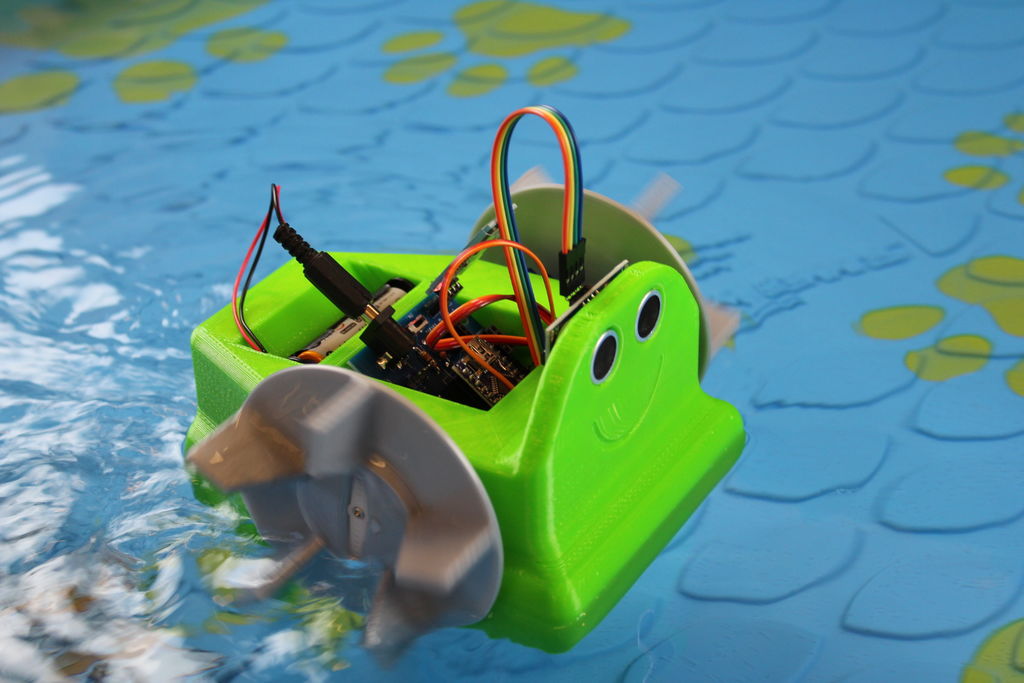


按照說明中的說明下載Littlebot應用程序并連接藍牙視頻
開始享受。甚至可以編輯代碼以添加新功能。
-
機器人
+關注
關注
210文章
28210瀏覽量
206544 -
Arduino
+關注
關注
187文章
6464瀏覽量
186657
發布評論請先 登錄
相關推薦
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
醫療機器人有哪些_醫療機器人有哪些應用
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
柔性機器人與剛性機器人區別與聯系

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
【開源作品】基于樹莓派4B、ESP32制作的桌面機器人、氣象站、立方光!
「喜報」邁步機器人榮獲機器人應用典型案例獎

LabVIEW的六軸工業機器人運動控制系統
工業機器人產業發展及應用現狀






 工商網監
工商網監
評論