 Arduino機械手臂的制作
Arduino機械手臂的制作
第1步:電子產品
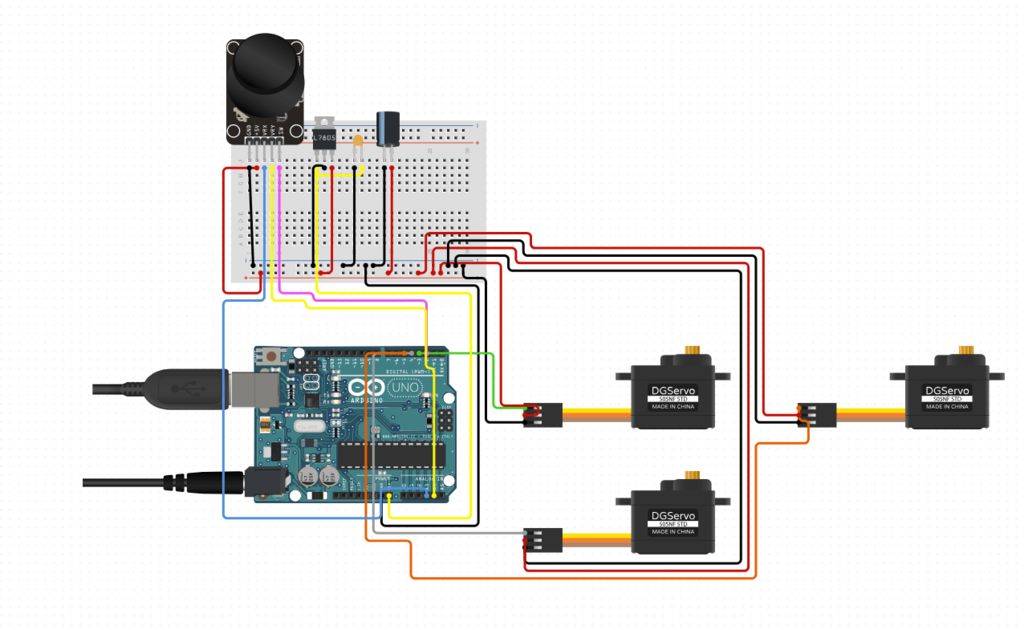
主要組件
Arduino UNO3
SparkFun舵機(通用金屬齒輪)
PS2操縱桿2軸模塊
次要組件
電壓調節器5v
電解電容器 - 1uF/50V
電容器陶瓷100nF
HeatSink TO-220
BreadBoard - 半尺寸
跳線包 - M/M
參見接線圖,或點擊此處
步驟2:代碼
首先,您需要從circuito.io上的代碼選項卡下載電路代碼。
按照步驟檢查您是否正確連接
使用此Github存儲庫中的firmware.ino代碼替換circuito.io中的firmware.ino測試代碼。保持其他庫不變。
確保保留“包含庫”和“引腳定義”。檢查引腳定義是否匹配。
第3步:材料

我們在車間使用了1厘米厚的木屑。在某些地方,我們將兩塊膠合在一起,以增加強度和堅固性。您可以檢查周圍的其他材料,但要確保它堅固而又靈活。
為了將零件捆綁在一起,我們制作了熱量 - 塑料瓶縮小了。這是一種很棒的技術,你可以用家里裝的塑料瓶來制作。玩一下,稍微測試一下,你會驚訝它們有多強。
手臂移動在3軸,因此我們將使用3個伺服電機。
第4步:基地
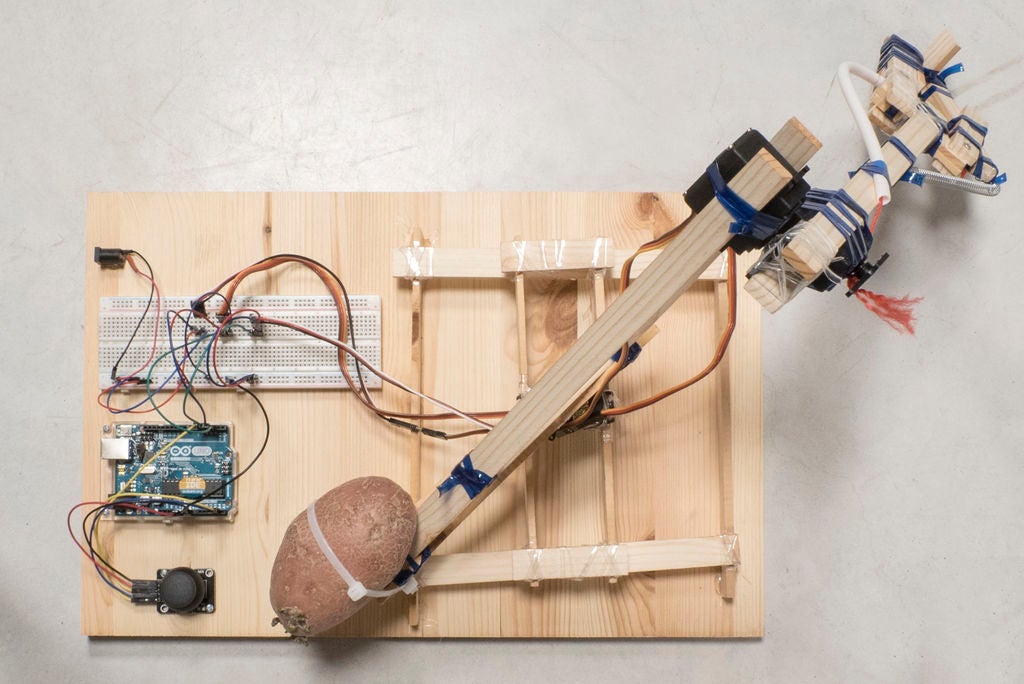
用堅實的底座開始構建,這樣手臂就不會翻倒。同時我們還需要了解什么是最好的綁定方式并將木塊系在一起,使基座堅固。在下圖中,您可以看到我們使用熱縮的方式和馬鈴薯(!)作為重量的基礎。只是不要忘記不時更換它:)
步驟5:平衡
放置第二伺服更棘手,我們覺得這個領域仍然需要一些關注。在構建原型之后,我們意識到我們沒有充分考慮平衡上臂。因此,伺服電機會消耗大量電流 - 這可以通過在臂的另一側使用配重來克服。
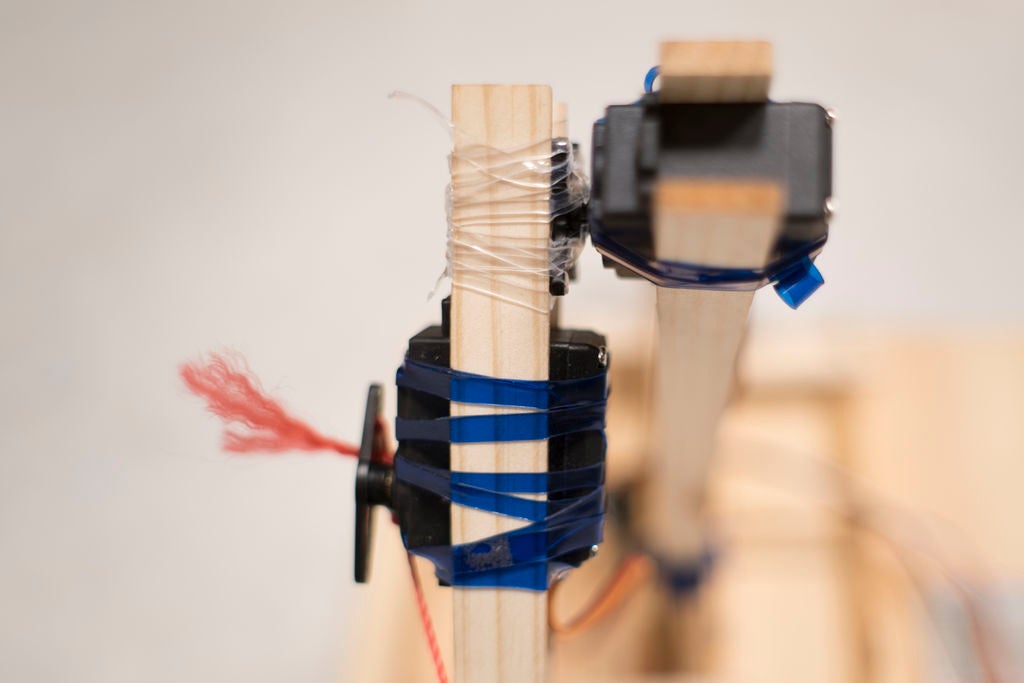
步驟6:夾持器

我們考慮過不同類型的夾具,我們不確定我們要做什么。最終,我們決定使夾具的一側靜止,以便它具有牢固的抓地力。正如您在下圖中所看到的,對于移動部件,我們制作了一個關節,由伺服控制并添加了一個用于關閉和打開的彈簧。
第7步:完成!

最后,我們在彈性管內放置了一些字符串,用于連接伺服電機和夾具,這與您可以找到的機制相同自行車剎車。
-
機械手臂
+關注
關注
2文章
101瀏覽量
41655 -
Arduino
+關注
關注
187文章
6464瀏覽量
186651
發布評論請先 登錄
相關推薦
機械手 OEM 的應用
機器視覺控制機械手的具體過程
PLC在機械手控制系統中的具體應用


PLC無線通訊技術在汽車噴涂車間機械手臂上的應用

ZR機械手:推動制造業向更高水平發展







 工商網監
工商網監
評論