") 自制四軸飛行器DIY圖解
自制四軸飛行器DIY圖解
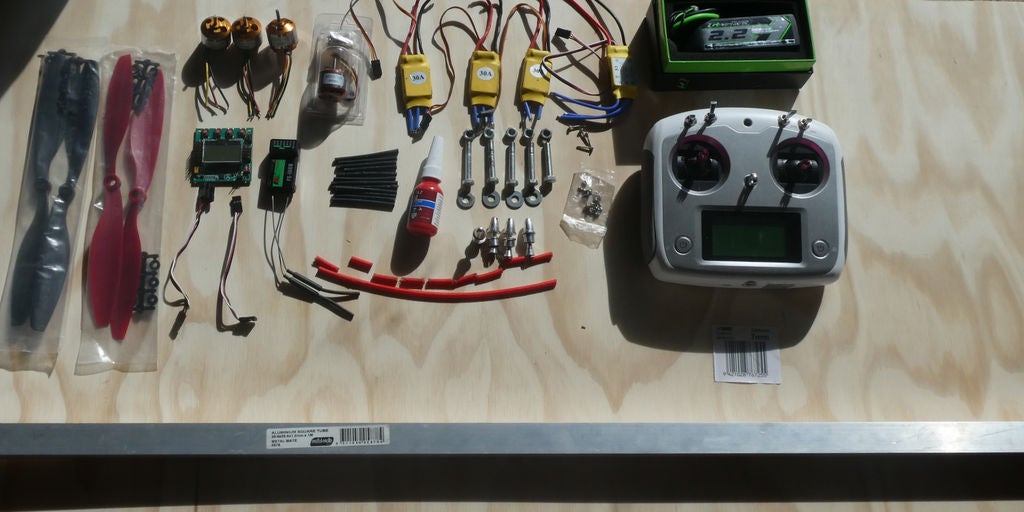
第1步:收集您的用品
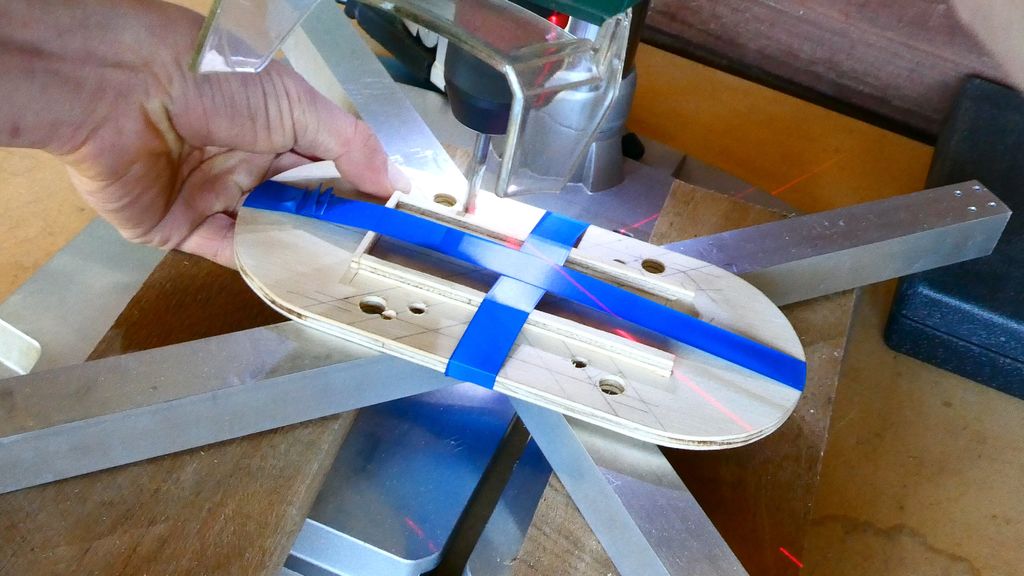
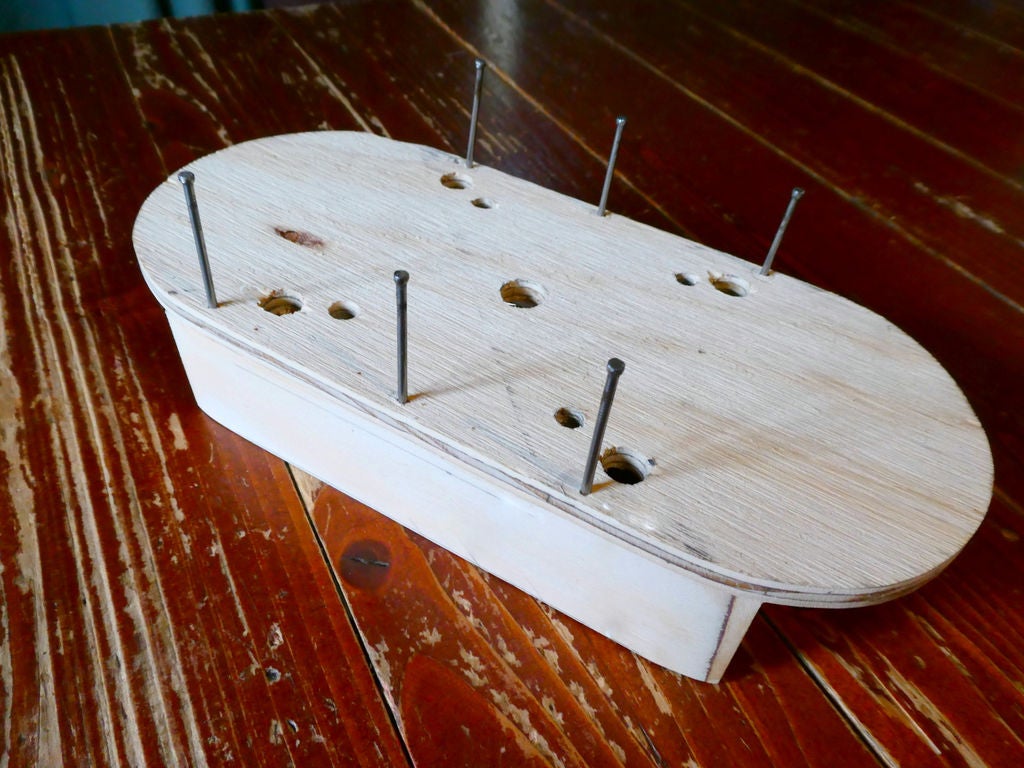
第2步:制作Pod





打印本節(jié)中的PDF并將其粘貼到膠合板上,切出并鉆出平面上的所有孔,然后切割一些薄的在基座上使用的膠合板條帶將電池固定到位。注意:您可以根據(jù)電池尺寸將電池盒的側(cè)面切割得更窄或更寬。
通過平衡底板上的電池并在末端畫一條線來(lái)找到平衡中心。將膠合板的小條膠粘到平臺(tái)上,使電池很硬,然后推入。
然后你已經(jīng)完成了第二步!
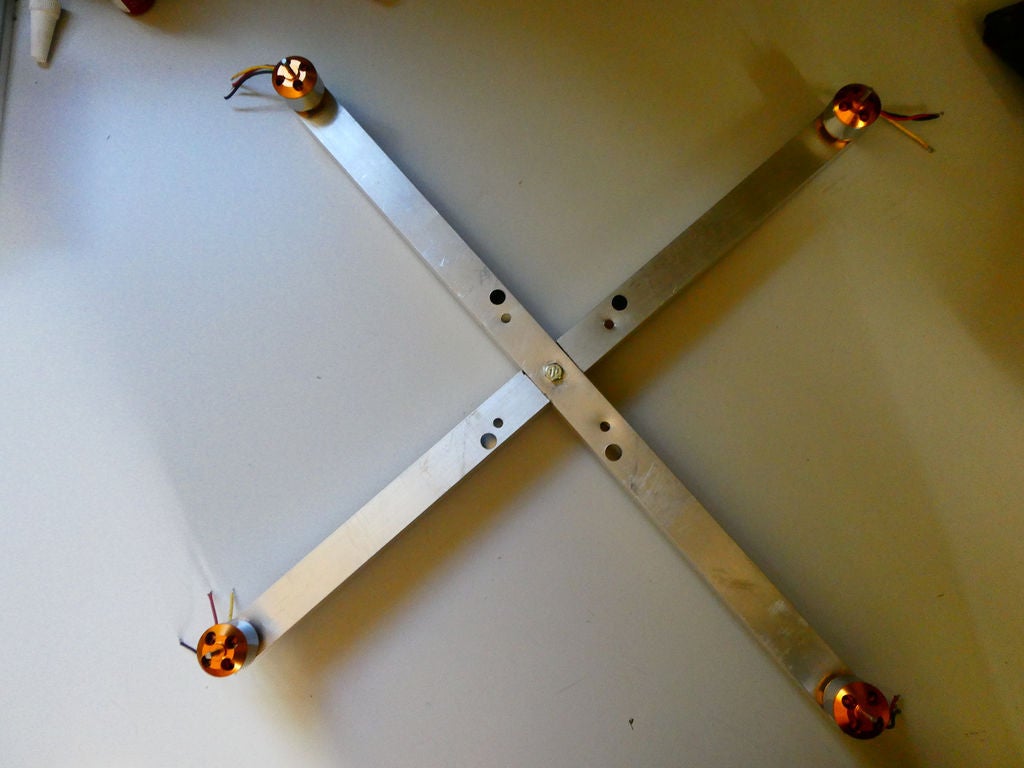
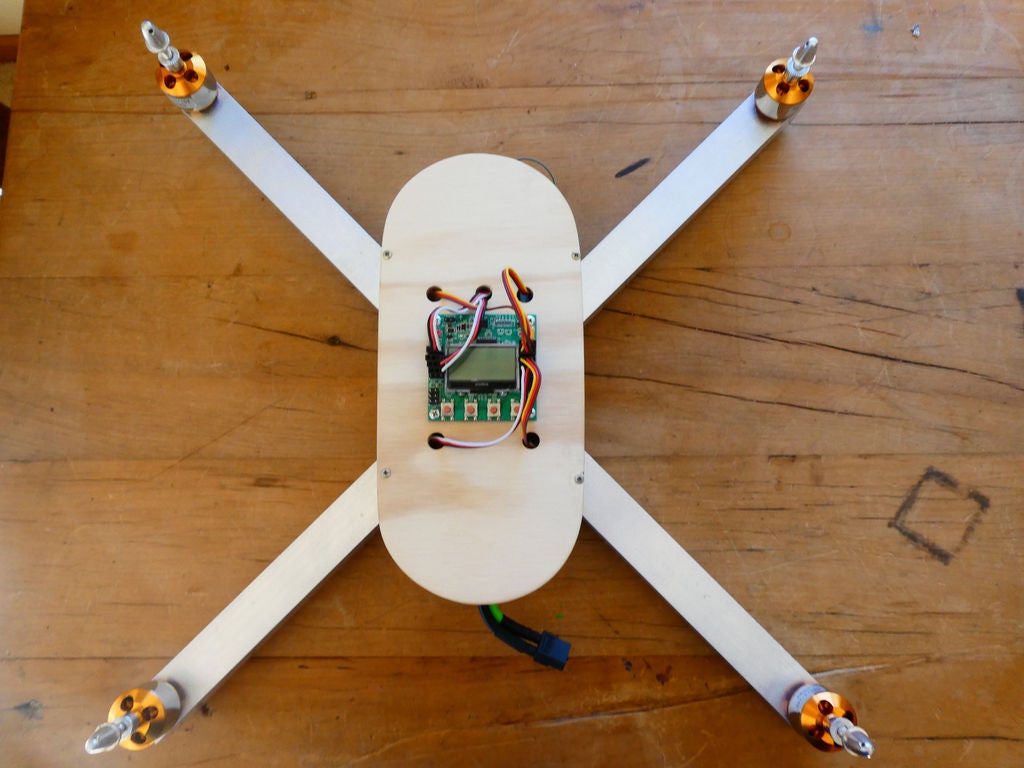
第3步:制作鋁框架

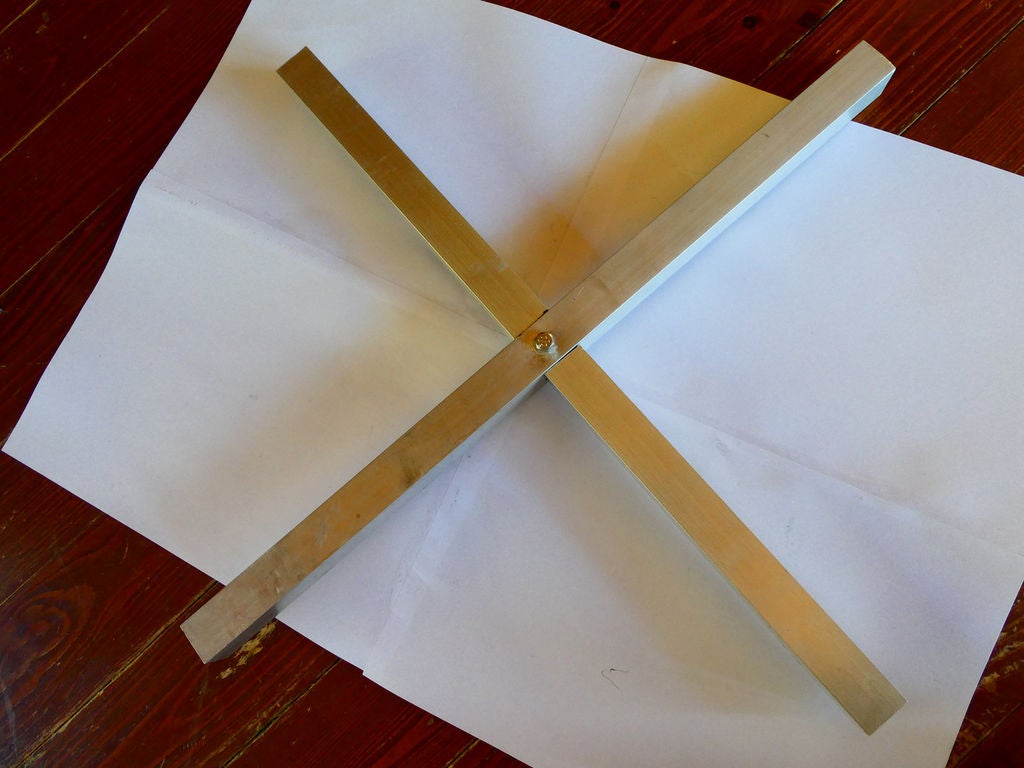


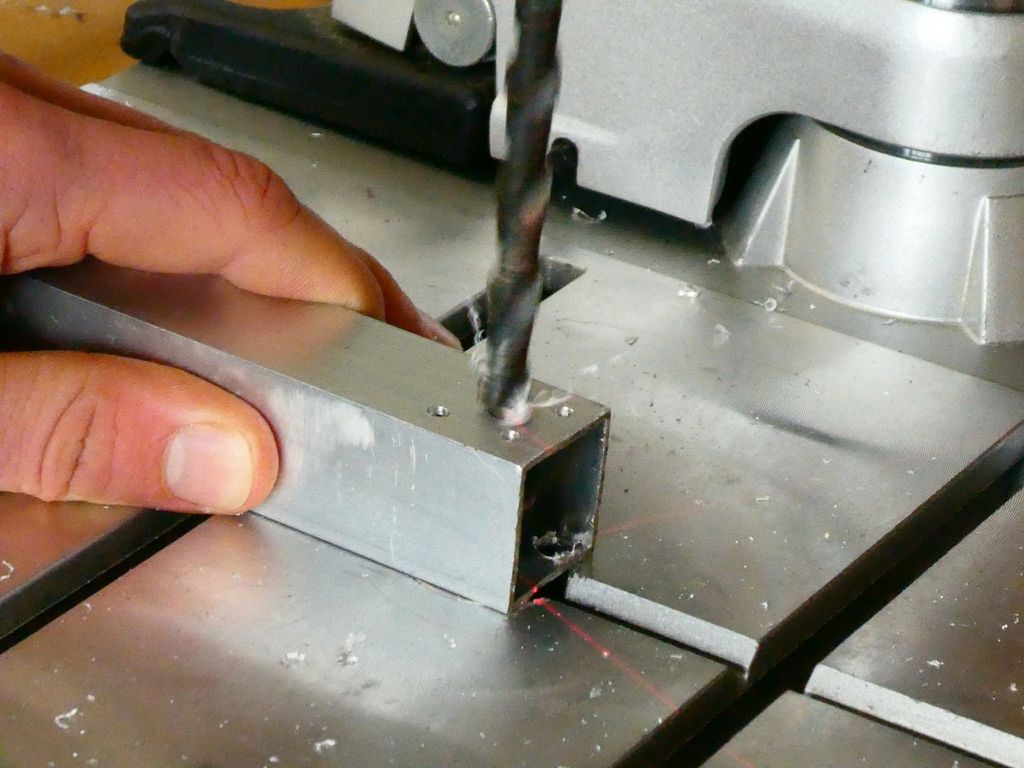

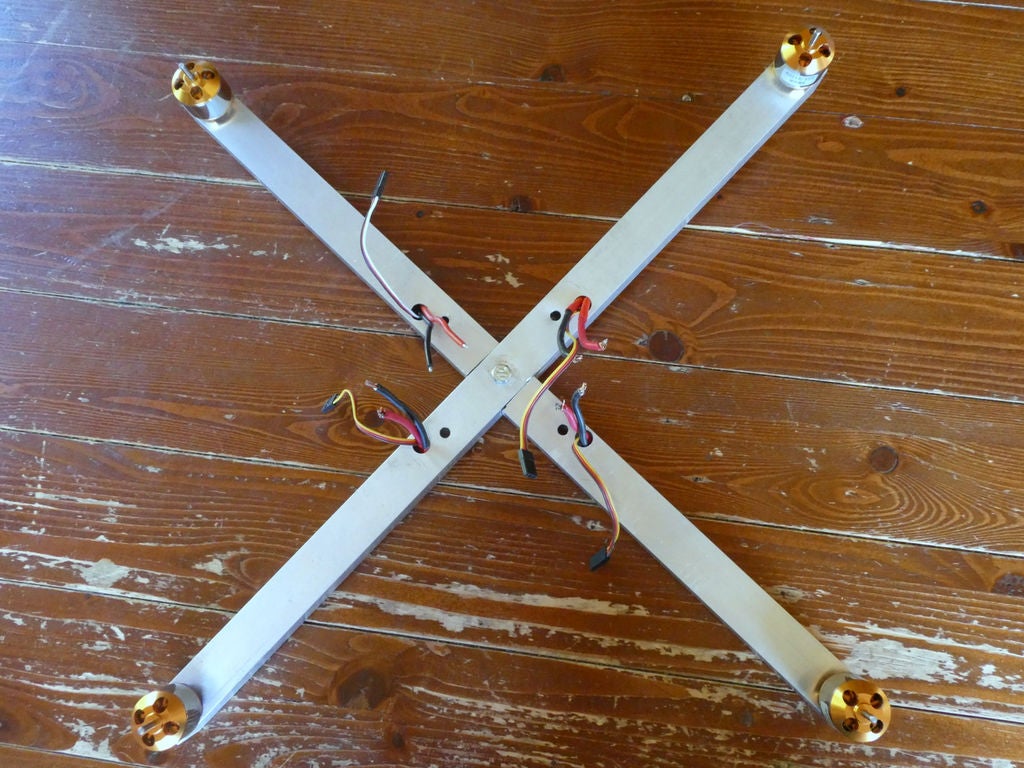
將鋁管切成兩個(gè)50厘米的長(zhǎng)度,將管子的寬度(2.5厘米)沿著每個(gè)管子的一半切割到一半深度,然后鉆孔和螺栓這兩個(gè)部分組合在一起,形成一個(gè)完美的X.
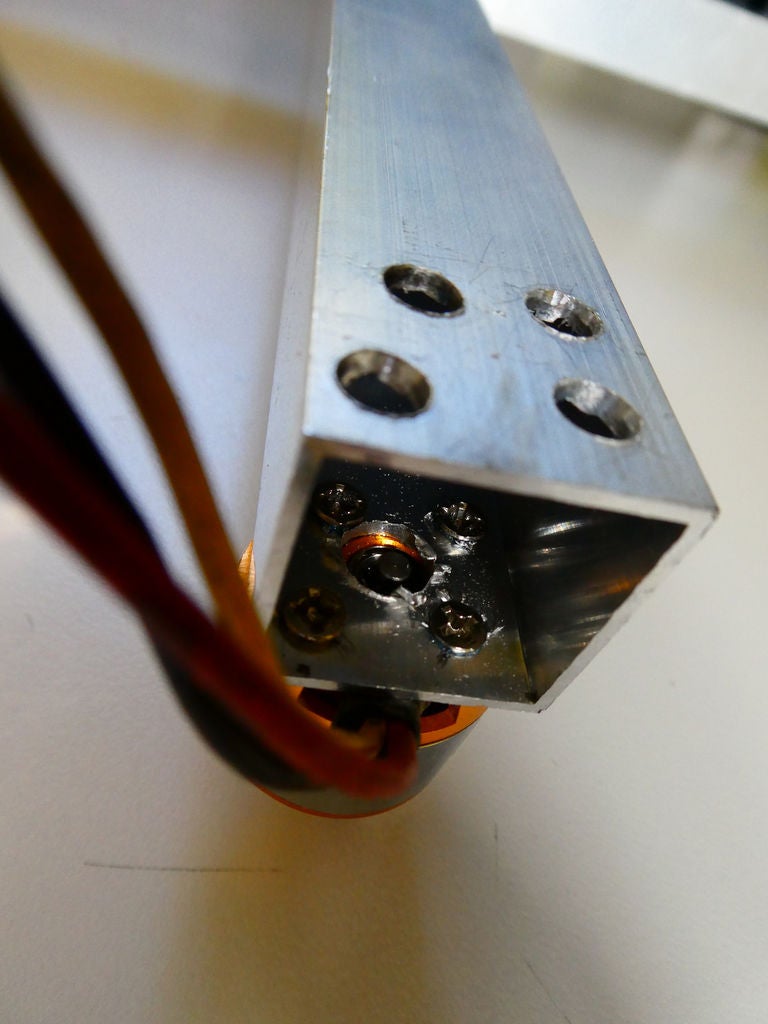
現(xiàn)在使用電機(jī)附帶的電機(jī)安裝座來(lái)畫出需要在X的末端鉆孔的位置。鉆孔。然后將吊艙帶到框架上并鉆出底座上的八個(gè)孔,同時(shí)確保銼掉鉆孔周圍的鋒利位置,否則它們會(huì)在以后撕裂您的ESC。
將側(cè)面粘到底座上并放入一些面板插針以加強(qiáng)它以防萬(wàn)一它崩潰。 :)
現(xiàn)在你已經(jīng)完成了第三步!
第四步:安裝電機(jī)和電位器
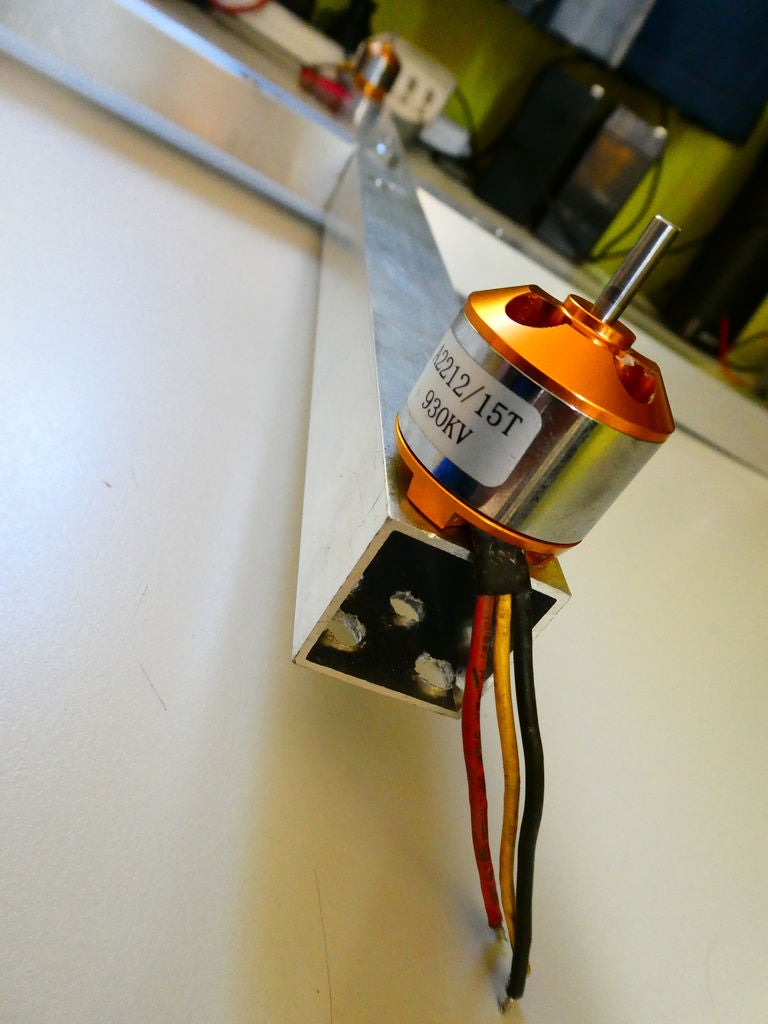
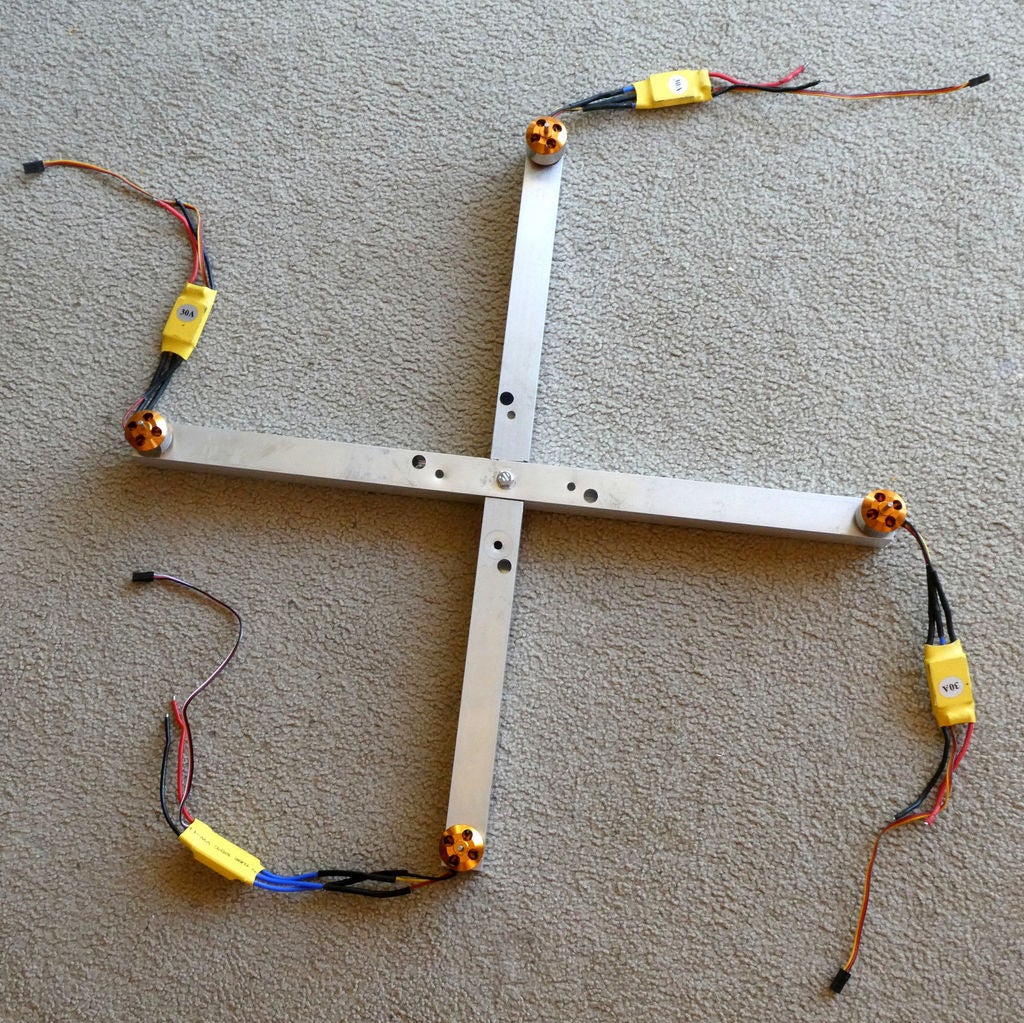
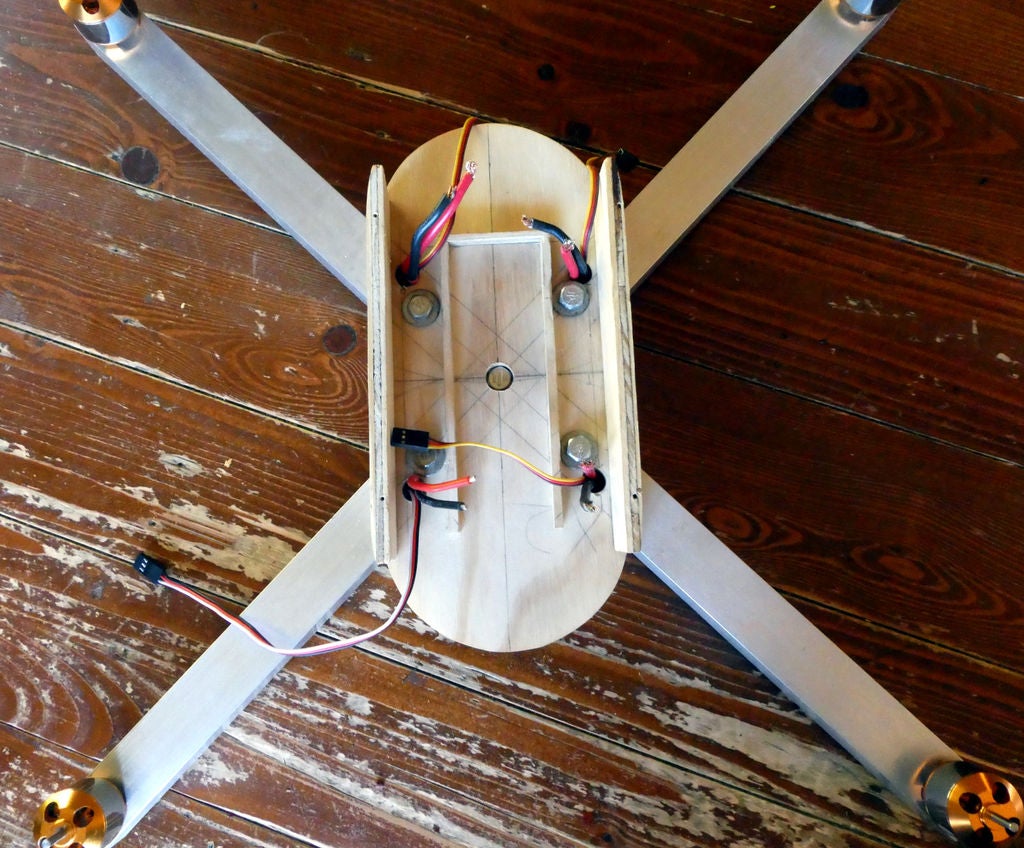
現(xiàn)在是時(shí)候?qū)㈦姍C(jī)擰到框架上了,這就是你的螺紋鎖定器派上用場(chǎng)的地方,如果你不使用它,你很可能在飛行時(shí)松開你的一個(gè)電機(jī),這可能不是你想要的是什么!
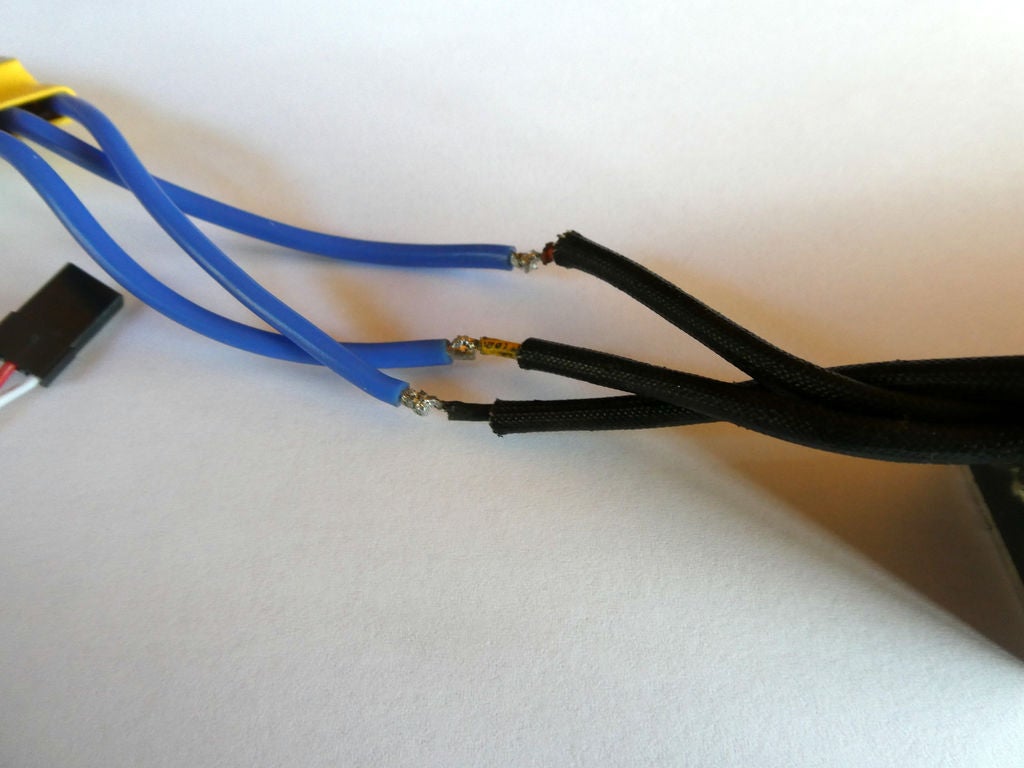
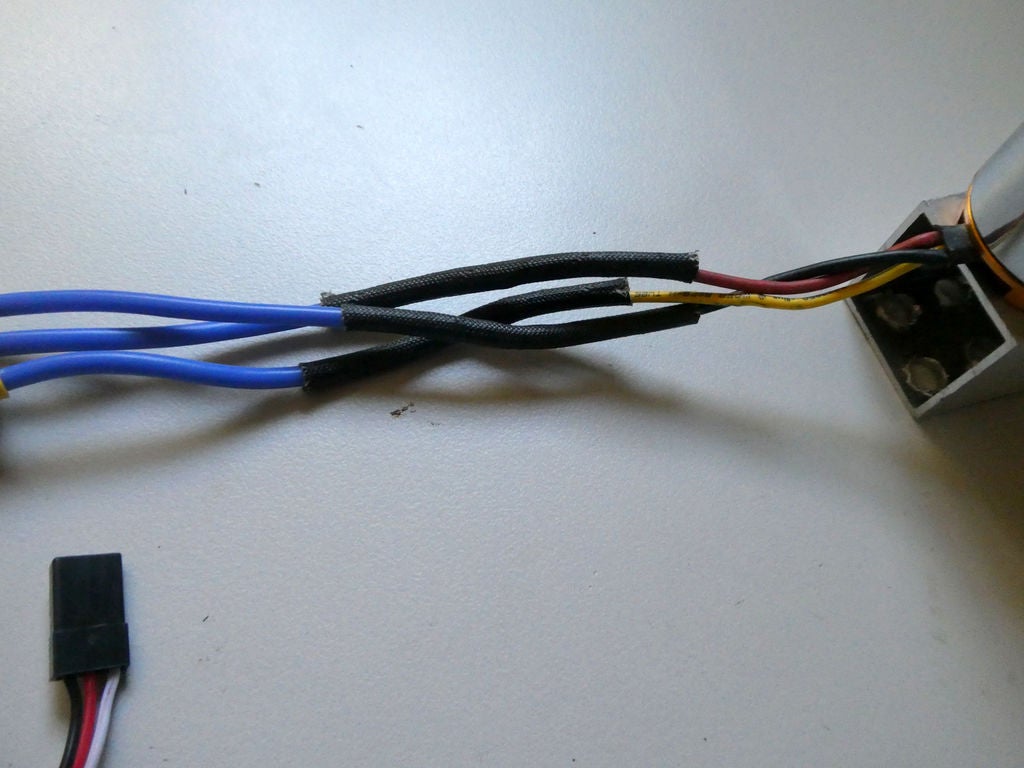
將你的ESC(電子速度控制器)連接/焊接到電機(jī)上,使左上電機(jī)順時(shí)針旋轉(zhuǎn),右上電機(jī)逆時(shí)針旋轉(zhuǎn),右下電機(jī)順時(shí)針旋轉(zhuǎn),左下方電機(jī)逆時(shí)針旋轉(zhuǎn)。要更改電機(jī)的方向,請(qǐng)更換ESC上的三根電線中的任意兩根,電機(jī)將反向旋轉(zhuǎn)。完成后,隔離你的連接/連接。
將ESC從鋁管中拉出,然后用鑷子將電線拉過孔。將你的吊艙排成一行,然后將吊索拉過框架。
然后你已經(jīng)完成了第四步!
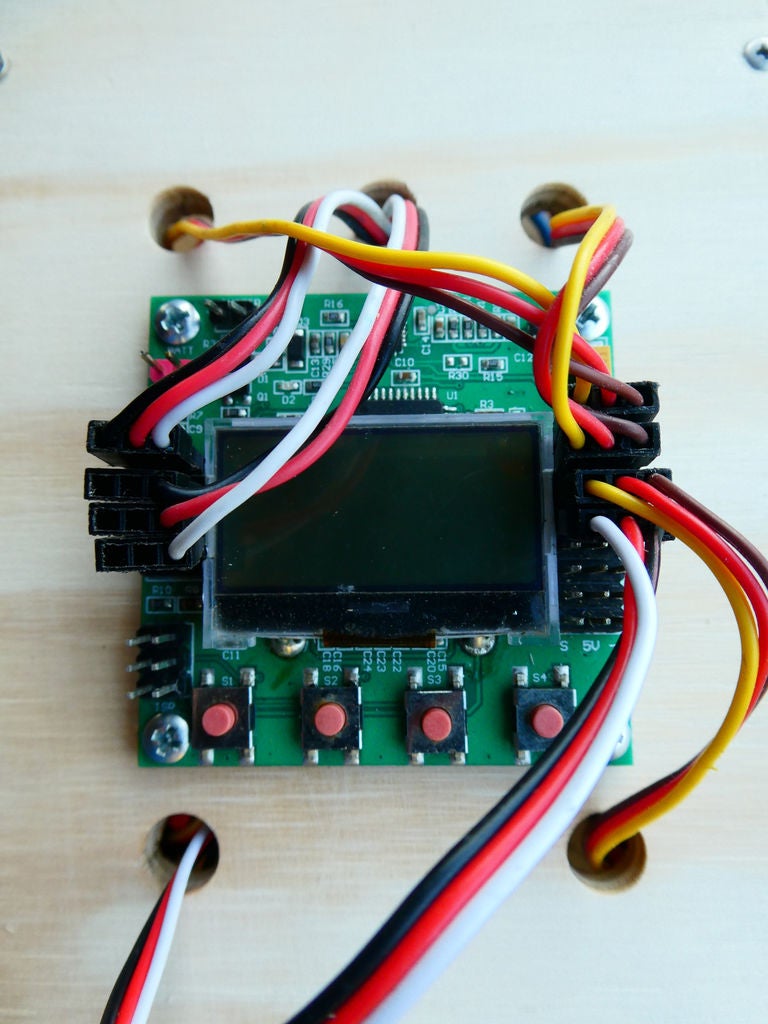
第五步:焊接導(dǎo)線并安裝Kk2.1.5飛行控制器
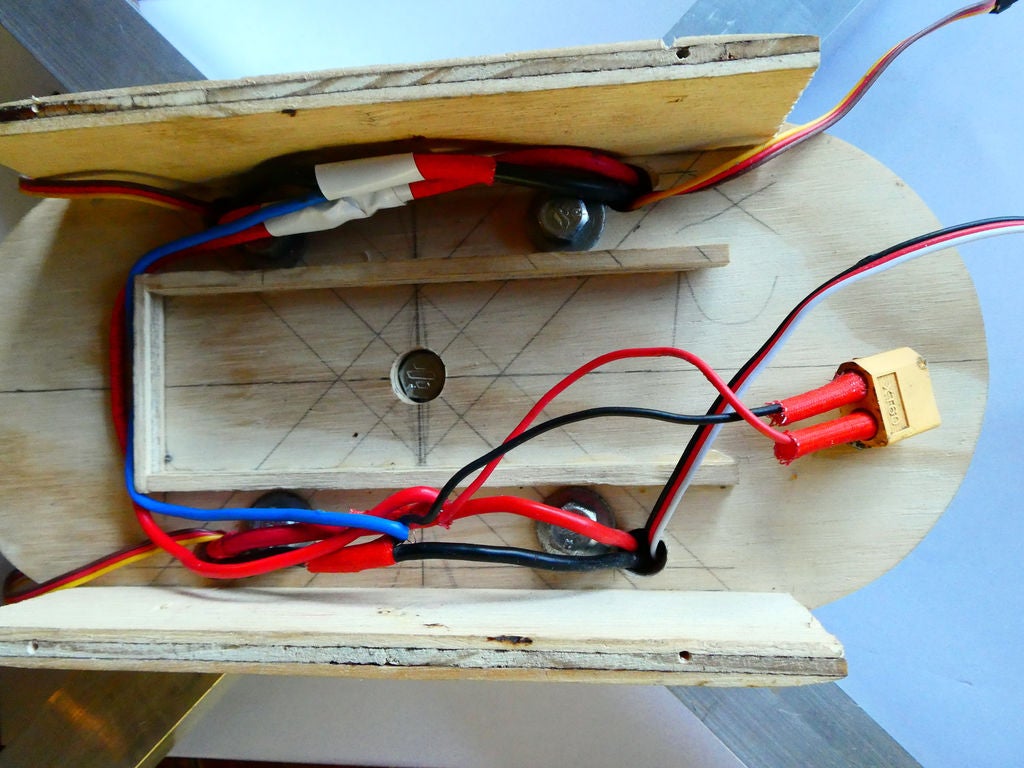
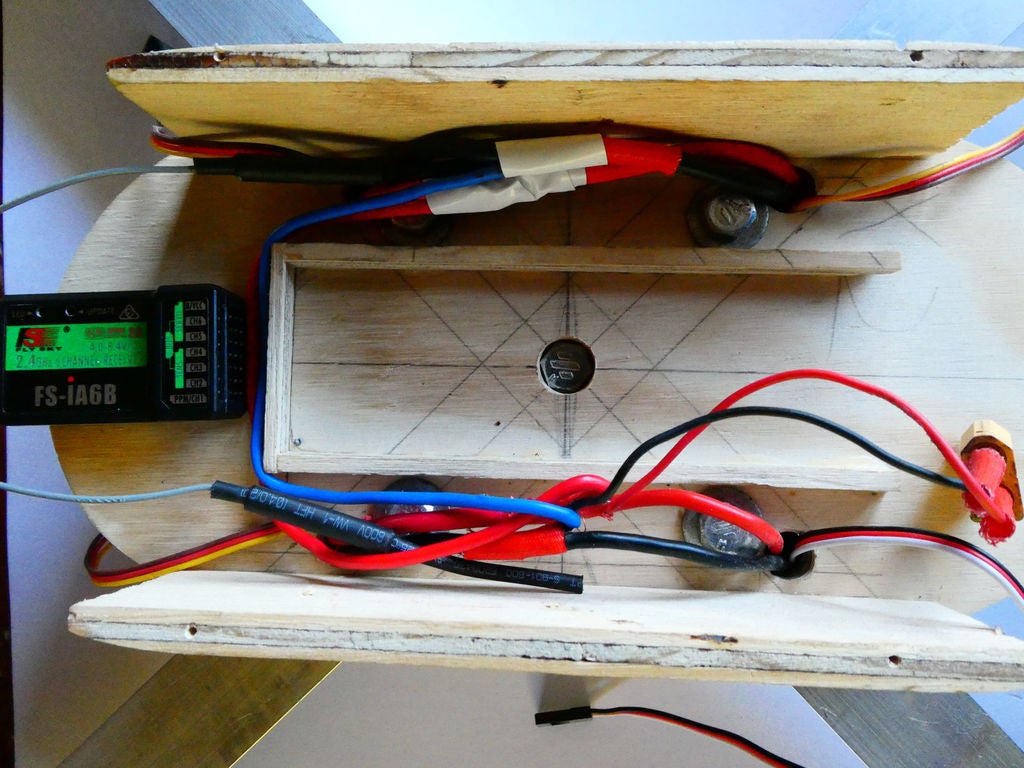
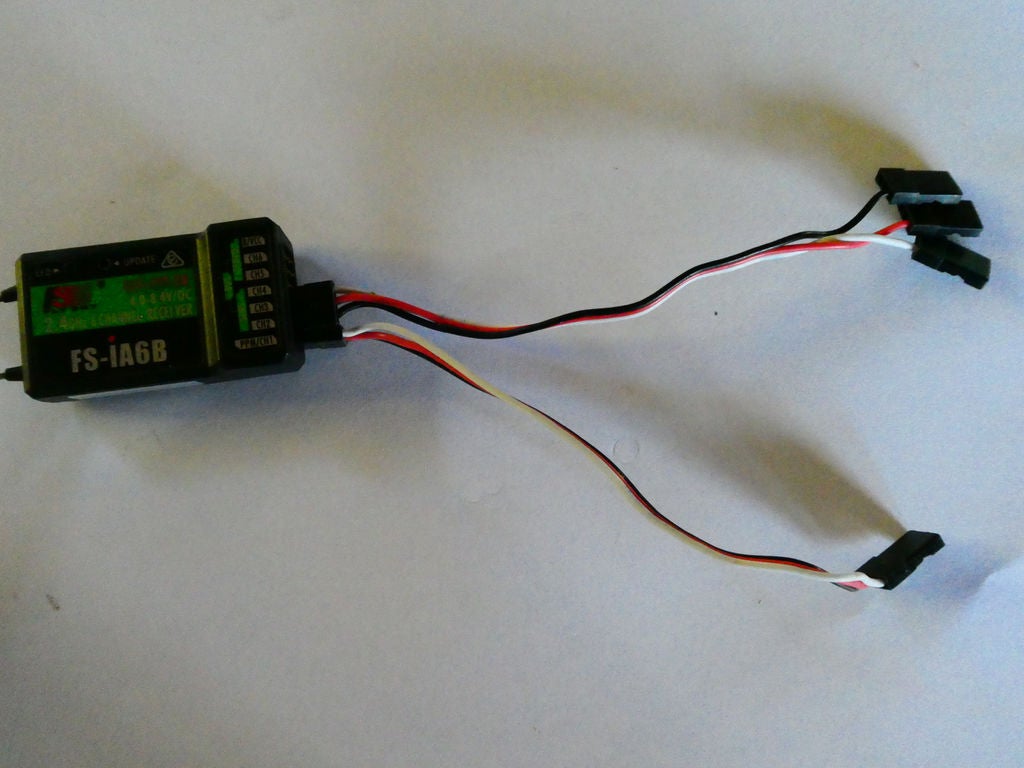
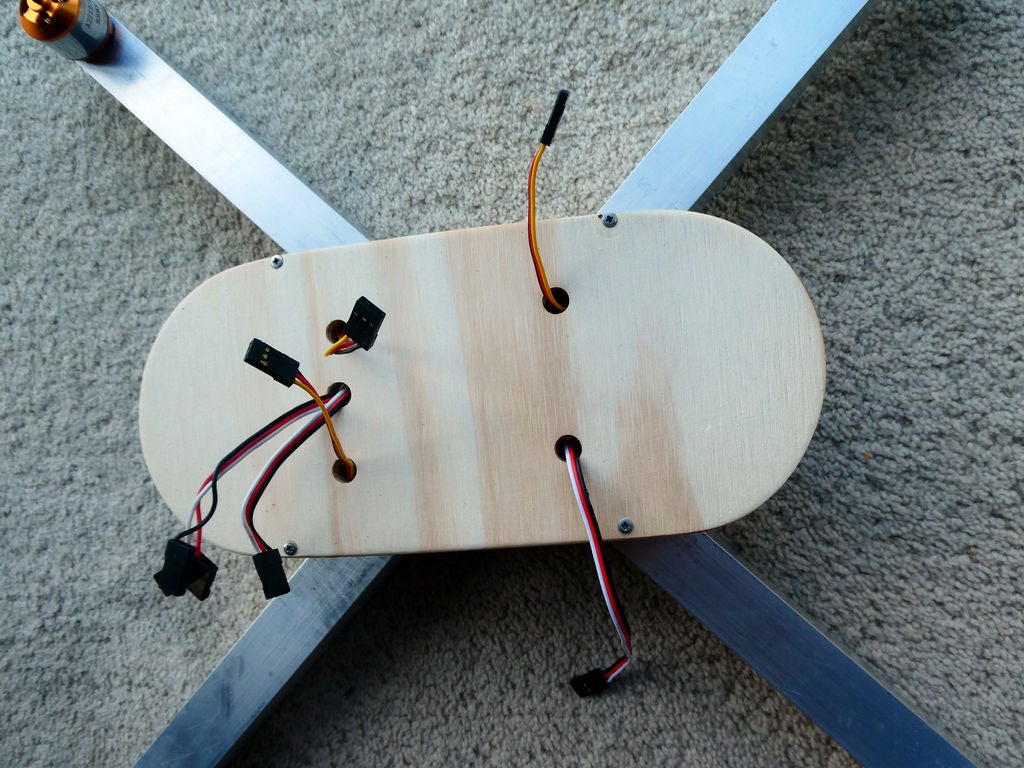
將所有黑色( - )導(dǎo)線和所有紅色(+)導(dǎo)線焊接在一起,同時(shí)將兩根導(dǎo)線焊接到XT60夾子(紅色和黑色)。用一些“藍(lán)色tac”將接收器連接到吊艙的前端(或者你可以使用一個(gè)活潑的扎帶。)
通過吊艙蓋上的孔將來(lái)自ESC和接收器的引線穿過然后擰上蓋子。接下來(lái)將kk2.1.5飛行控制器擰到蓋子上。將ESC的引線連接到kk2.1.5飛行控制板的右側(cè),將接收器的引線連接到左側(cè)。
您現(xiàn)在已經(jīng)完成了第五步!
步驟6:設(shè)置KK2.1.5飛行控制器
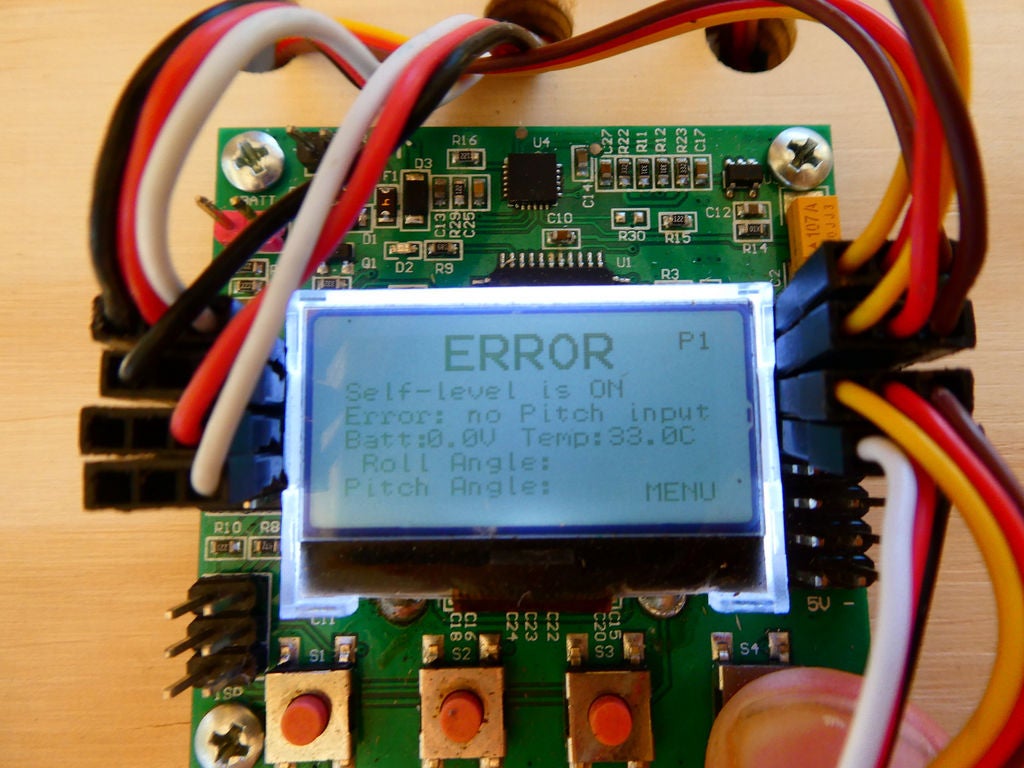
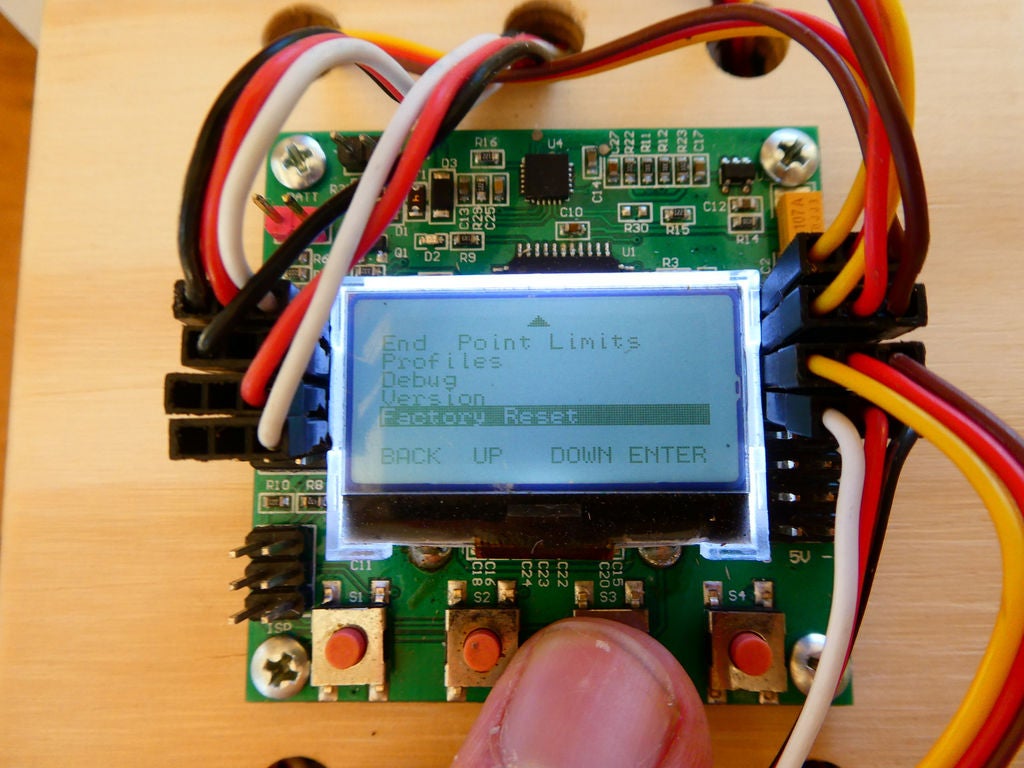
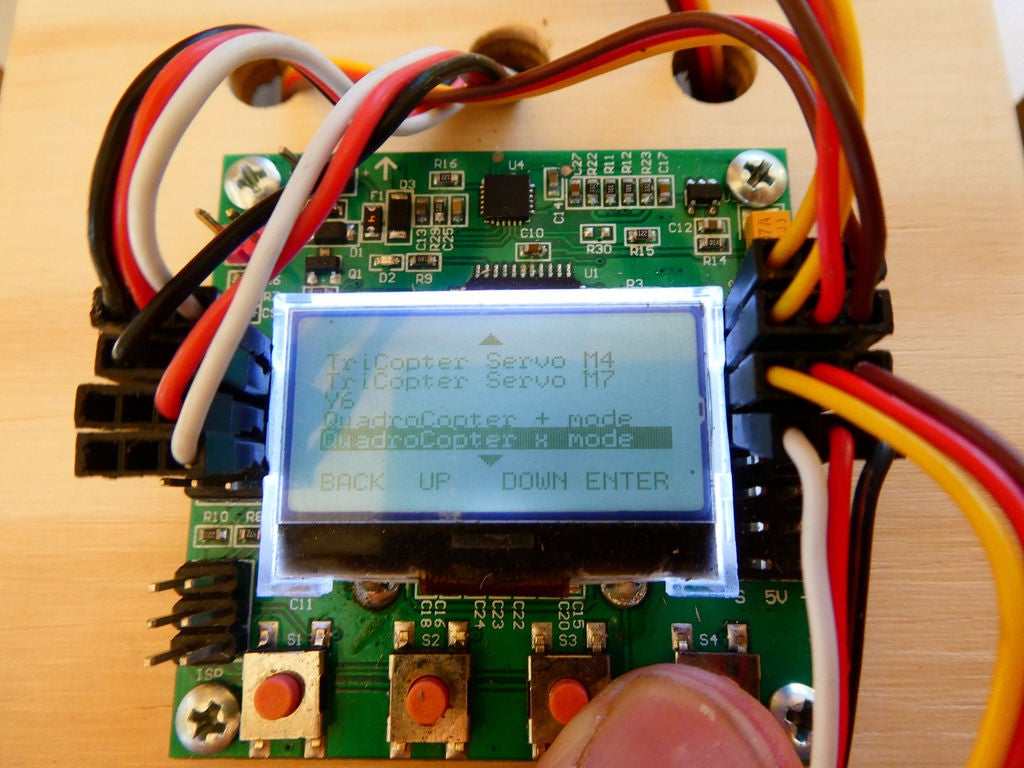
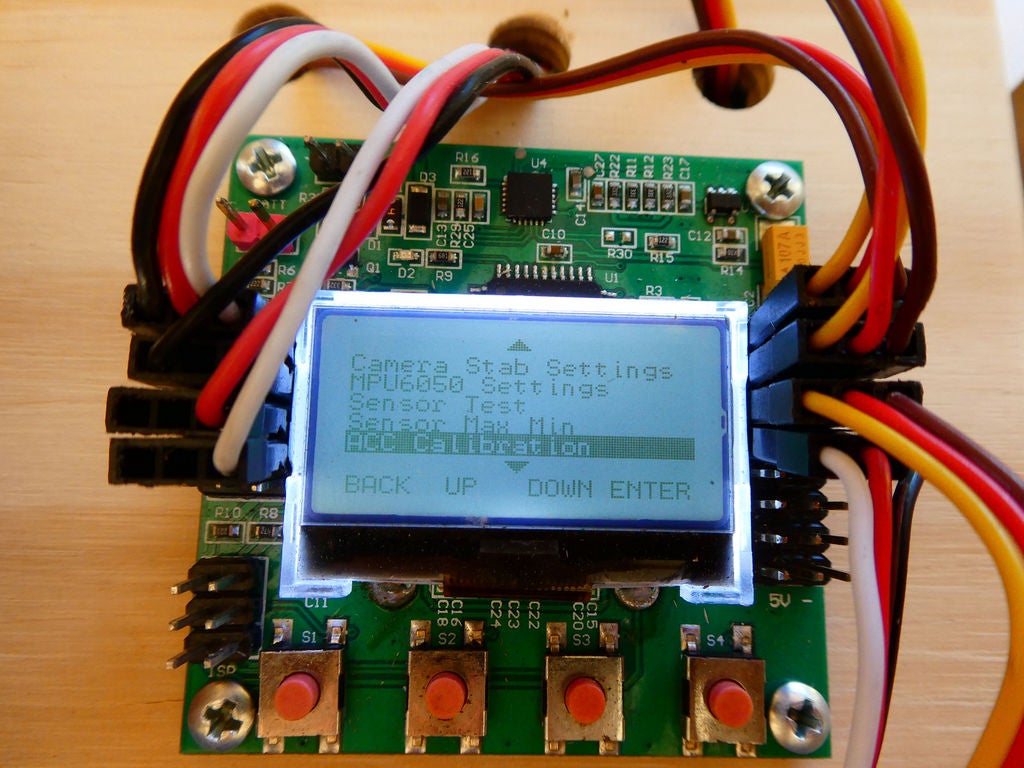
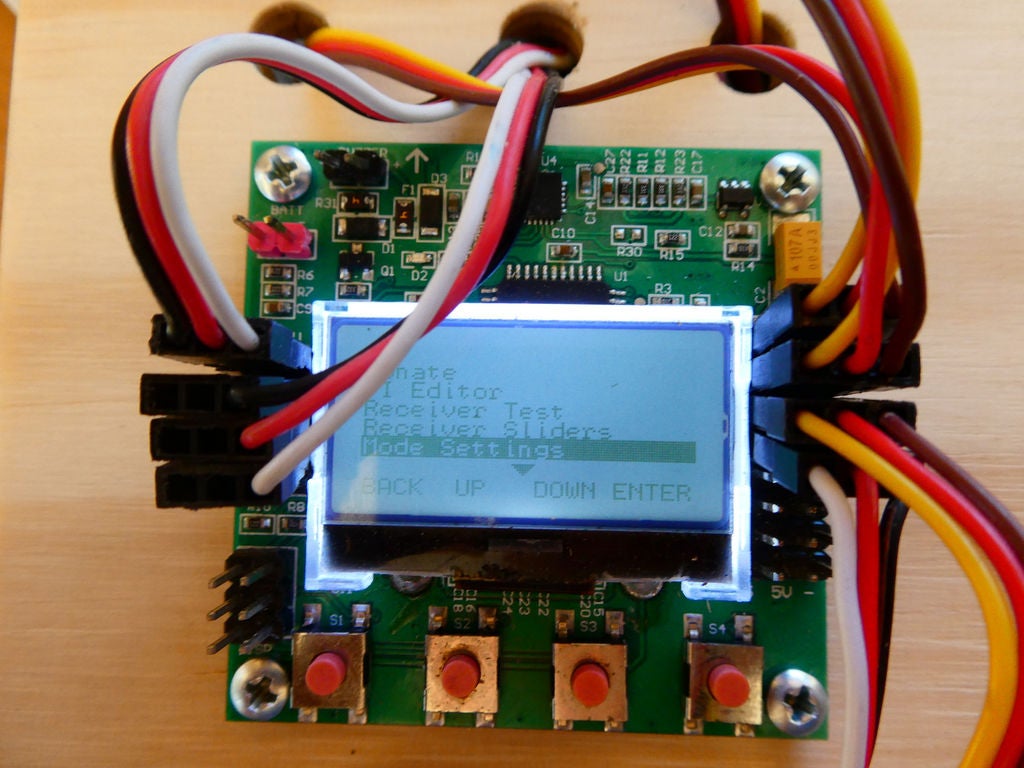
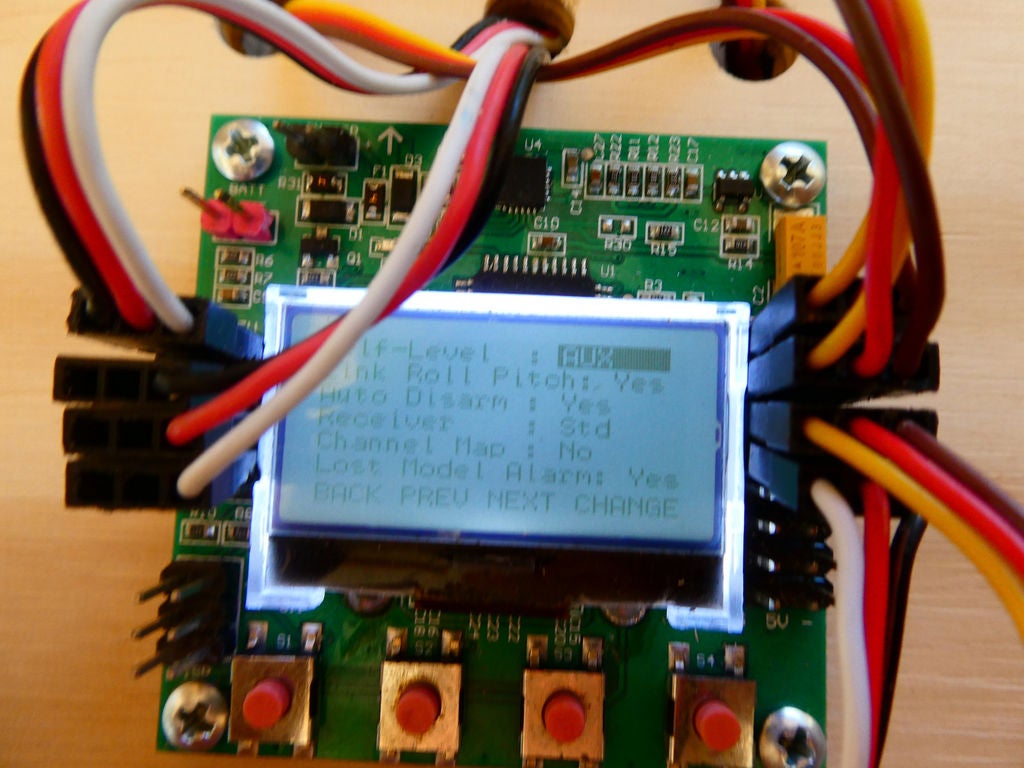
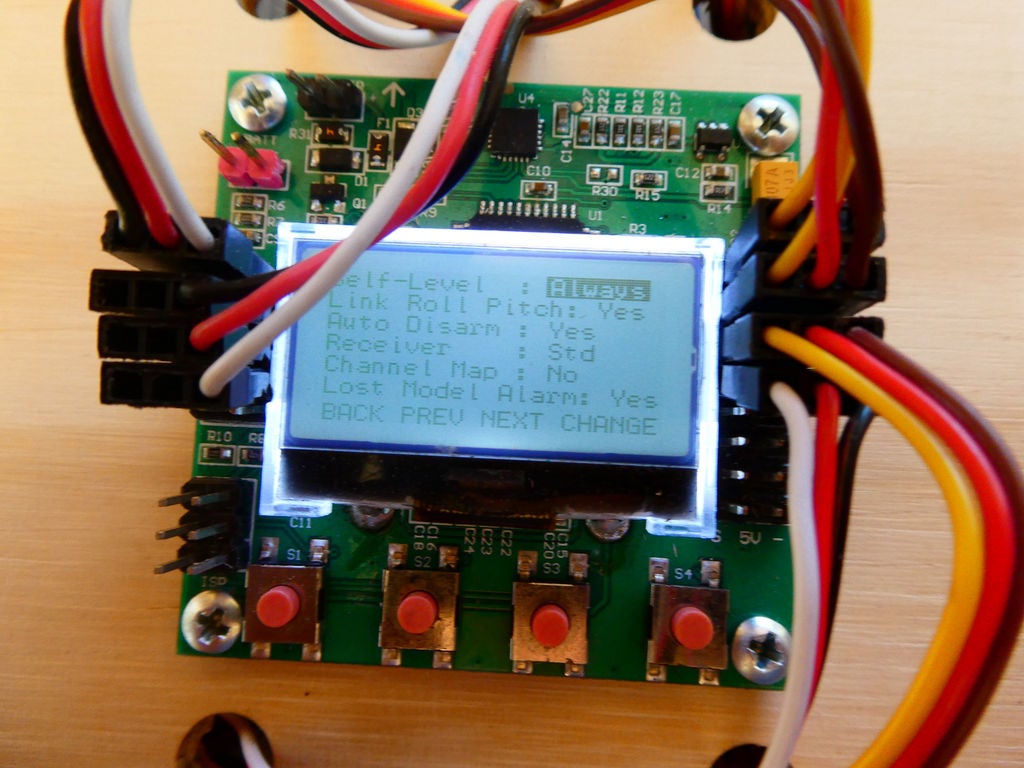

插上電池和kk2飛行控制器應(yīng)該啟動(dòng),它應(yīng)該顯示一條錯(cuò)誤信息,忽略它并按菜單按鈕,向下滾動(dòng)到底部并單擊‘恢復(fù)出廠設(shè)置’。然后它應(yīng)彈出一個(gè)菜單,用于選擇你想要的無(wú)人機(jī)框架,向下滾動(dòng)直到你進(jìn)入四軸飛行器X模式,點(diǎn)擊“接受”,再點(diǎn)擊背面再返回,返回菜單并向下滾動(dòng)到‘ acc校準(zhǔn)’。將無(wú)人機(jī)放在平坦的表面上,然后單擊“校準(zhǔn)”。完成后,向上滾動(dòng)至模式設(shè)置并將自動(dòng)電平從“AUX”更改為“始終”。
拔下電池,打開控制器電源,然后重新插入電池。 kk2飛行控制器應(yīng)該打開并且現(xiàn)在顯示SAFE,將控制器的左手操縱桿向下移動(dòng)到左上角,顯示器應(yīng)該從SAFE變?yōu)?a target="_blank">ARMED,
你現(xiàn)在已經(jīng)完成第六步
第七步:添加道具


拿四個(gè)道具鋪設(shè)它們將塑料墊圈與道具一起放在中心位置,以便適合電機(jī)。將支柱放在電機(jī)桿上并擰緊子彈形頂部。
祝賀你!您現(xiàn)在已經(jīng)完成了設(shè)置四軸飛行器的最后一步!快去!
第8步:提示與技巧
您可能會(huì)發(fā)現(xiàn)四軸飛行器非常敏感。開始飛行的最佳方式是在離地面約1米的地方飛來(lái)飛去,左右飛行,然后開始將四軸飛行器繞成圓圈。它不喜歡“生澀”的飛行,所以學(xué)會(huì)盡可能保持你的控制動(dòng)作。
提示1:前面有不同顏色的道具而不是背面
提示2:當(dāng)你開始飛行時(shí),保持無(wú)人機(jī)的背面朝向你,這樣你就可以知道哪個(gè)是左右的。
提示3:如果你撞到你的話,購(gòu)買碳纖維道具可能是一個(gè)很好的投資quadcopter很多(像我:) :)
提示4:為飛行控制器尋找某種封面(例如淺塑料蓋)
-
四軸飛行器
+關(guān)注
關(guān)注
55文章
206瀏覽量
51113
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DIY了一臺(tái)無(wú)人機(jī),用全志T113芯片
開源項(xiàng)目!DIY了一臺(tái)無(wú)人機(jī),用全志T113芯片
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧

開源項(xiàng)目!用ESP8266 DIY會(huì)爬墻的無(wú)人機(jī)
中科宇航研發(fā)太空旅行飛行器,預(yù)計(jì)2028年開展太空邊緣載人旅游
上海峰飛航空領(lǐng)先全球低空飛行器領(lǐng)域,展望2040年
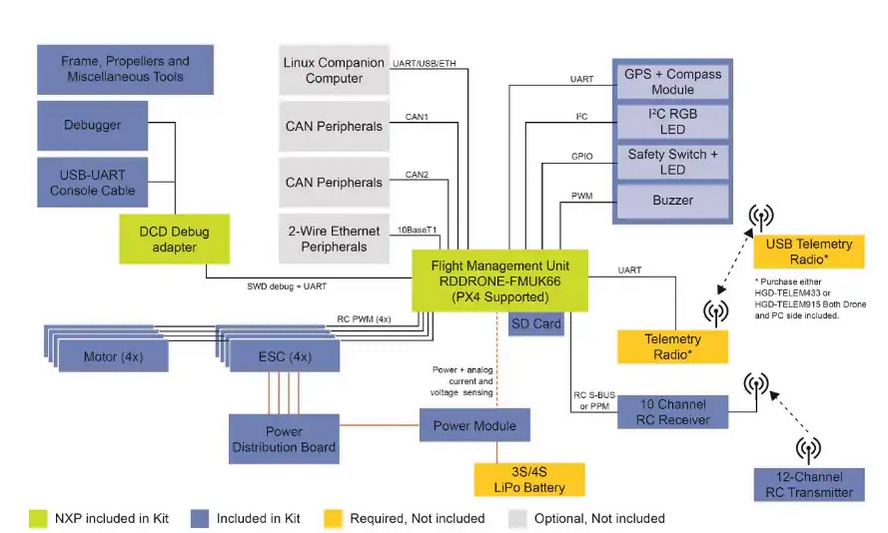
NXP Semiconductors HoverGames無(wú)人機(jī)系統(tǒng)解決方案
基于非線性自適應(yīng)學(xué)習(xí)控制器的四軸飛行器避障方案
傳感器融合的工作原理
華為飛行機(jī)器人專利助推低空經(jīng)濟(jì)發(fā)展
什么是姿態(tài)傳感器MPU6050
基于RT-Thread與滑模控制的微型多旋翼定點(diǎn)控制系統(tǒng)研究
探秘四軸按鍵測(cè)試機(jī):提高生產(chǎn)效率的利器

磁力計(jì)LIS2MDL開發(fā)(3)----九軸姿態(tài)解算

四軸PID算法:?jiǎn)苇h(huán)和串級(jí),你搞懂了嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論