") 機器狗制作全過程圖解
機器狗制作全過程圖解
第1步:收集所有零件
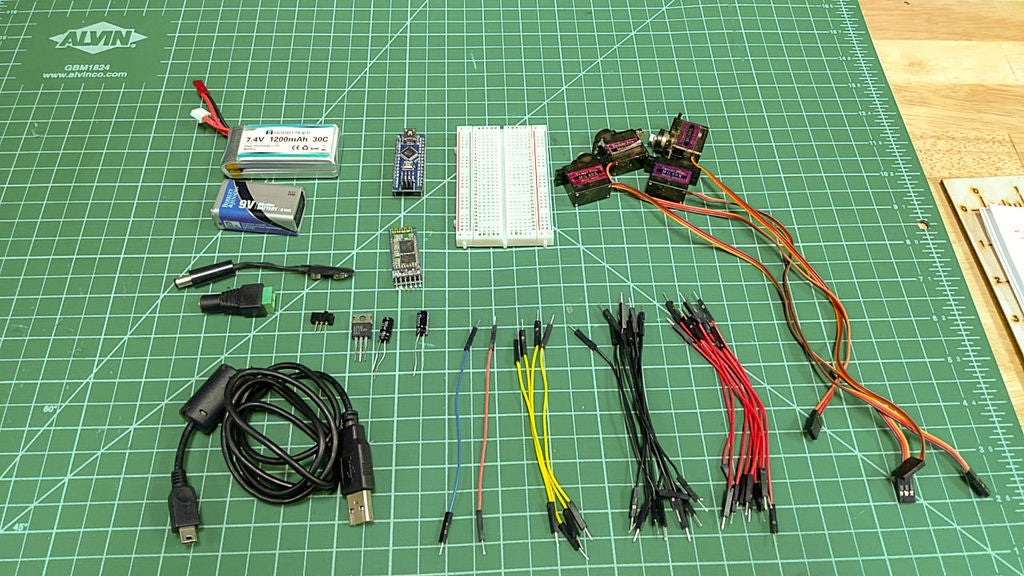
PARTS
4 x Tower Pro MG90S金屬齒輪微伺服 Adafruit
您可以購買更便宜的塑料減速電機。
但是,它們并不耐用,也沒有經過這個項目的測試。
1 x Arduino Nano Arduino
你可以使用任何Arduino。 Nano非常適合面包板
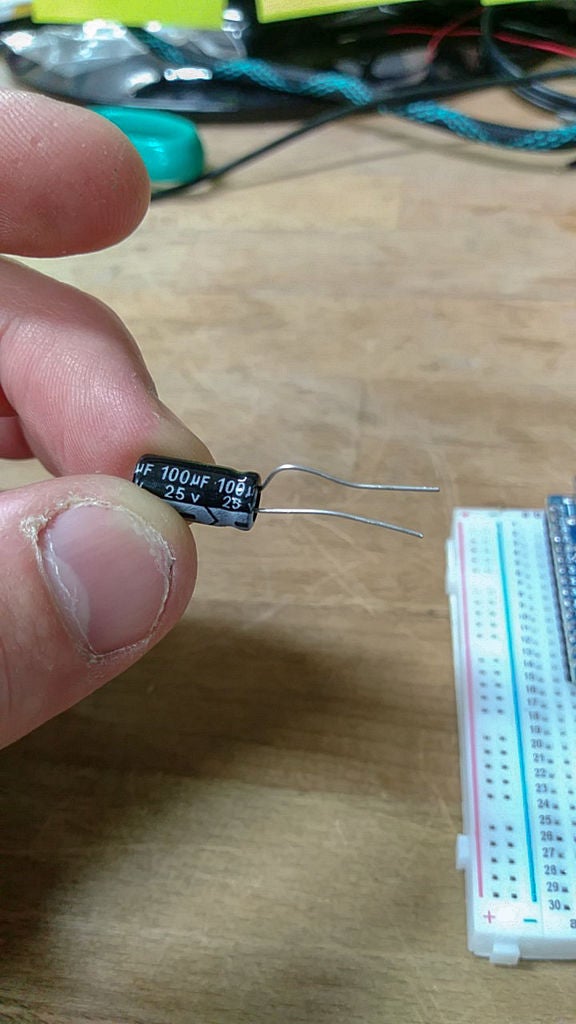
2 x 100uF電解電容器 Adafruit
需要這些來消除功率供應伺服電機并防止反電動勢進入電池。我見過使用二極管,但從未嘗試過。
1 x 5 V穩(wěn)壓器 SparkFun
這會使電池的電壓達到5伏。使用穩(wěn)壓電源,您的伺服電機可以使用更長時間,性能更佳。
1 x HC-05或HC-06藍牙模塊 NewEgg
HC-06只能 接收 輸入,而HC-05是 收發(fā)器 ,這意味著它可以 接收 和 傳輸 數據。重要的是要知道您正在使用哪種類型的故障排除錯誤以及在設置應用程序時知道要連接的內容。如果您希望DoggoBot與您“交談”,請使用HC-05。如果您希望DoggoBot只“傾聽”您,請使用HC-06。
1 x半尺寸面包板 Adafruit
半尺寸面包板適合所有組件,但較大的面包板也可以正常工作。
1 x 7.4 1200 mah LiPo電池 NewEgg
舵機每個需要5伏和幾百毫安。這種LiPo電池可以提供足夠的毫安,我們可以輕松地將7.4伏電壓調節(jié)到5伏。額外的好處是電池是可充電的。充電LiPo電池時要小心。此列表中的電池和充電器匹配并且可以很好地協(xié)同工作。
1 x LiPo電池充電器 NewEgg
上述電池的充電器。再次充電LiPo電池時要小心。不要讓他們一夜之間充電。
1 x 9伏電池亞馬遜
在嘗試使用Arduino和伺服器時遇到了一些問題LiPo電池。最簡單的解決方案是使用9伏電池單獨為Arduino供電。 9伏特為Arduino提供足夠的毫安,以控制伺服系統(tǒng)并為藍牙模塊供電。
1 x SPDT開關 Adafruit
這可讓您關閉電池組,從而切斷電源。調試代碼時,沒有腿移動會很有幫助。
DC Barrel Jack Adapter Sparkfun
這用于將Arduino連接到9伏電池。我發(fā)現這個非常有用,因為你不需要焊接任何東西。您可以使用一對跳線作為正極和負極,然后使用Arduino的Vcc和GND引腳將端部放入面包板行。
9伏電池桶式插孔適配器 Sparkfun
用于將9伏電池連接到Arduino。
男性對男性跳線 SparkFun
與M&Ms非常相似,顏色在這里并不重要。內部仍然是相同的材料。但是,我發(fā)現對電源,接地和信號線等顏色進行顏色編碼非常有幫助。說明書使用特定顏色的東西,但隨意使用你喜歡的任何顏色。這是我列出的每種顏色的數量。
1 x藍色1 x橙色
4 x黃色
9 x黑色9 x紅色
可選零件
紙張緊固件訂書釘
如果不這樣做有權使用3D打印機,您可以隨時使用紙質緊固件。任何銷售靜止的地方都應該有一些。中小尺寸效果很好。
遮蔽膠帶訂書釘
如果您沒有熱膠槍,您可以隨時使用膠帶來固定碎片一起。遮蔽膠帶易于使用,但粘性可能因品牌而異。廉價的東西往往不能把事情搞得一團糟。花幾美分,你以后會感謝我。
激光切割文件
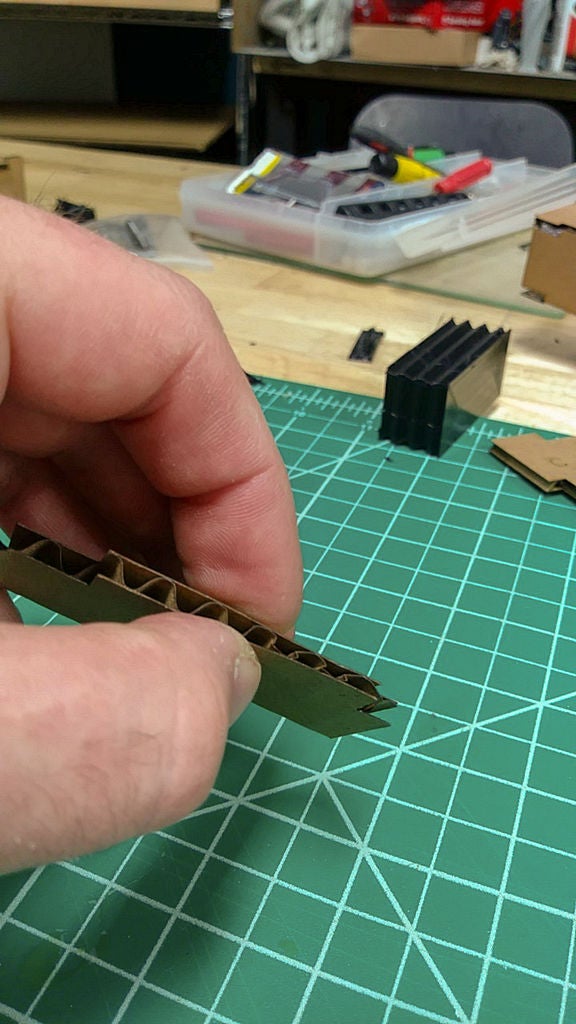
如果您沒有激光切割機,可以使用此文件作為切割指南手工零件。我用激光切割機制作了部件的標簽和插槽,這些都是手工操作的難點。標簽和插槽使腿部更容易組合,確保每條腿都是方形的。您可以隨時將測量結果概括為矩形,并將部件從一些廢紙板上切割下來。 該文件采用ai和svg格式。請參閱隨附的zip文件,了解所有必要的零件文件和代碼。
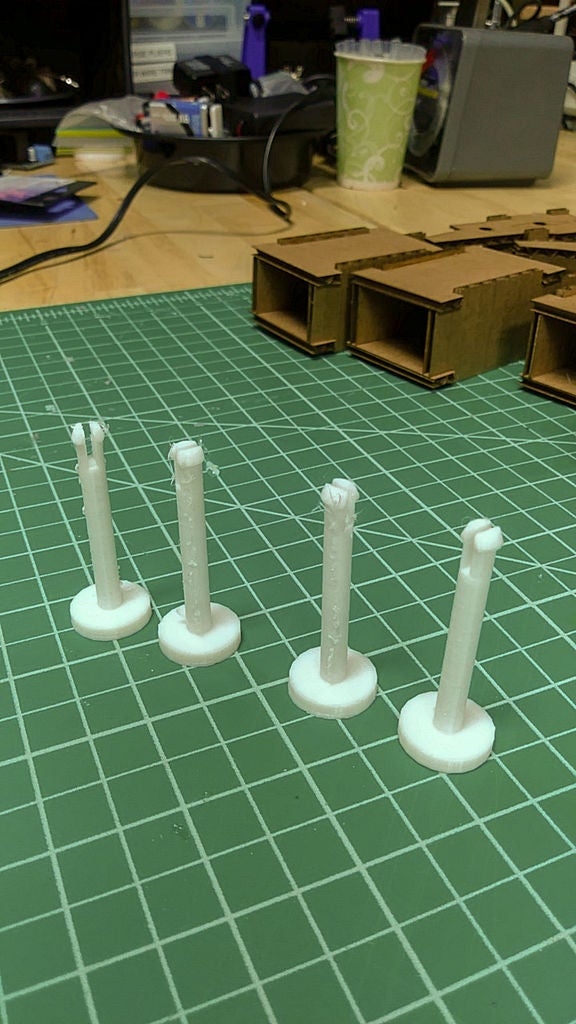
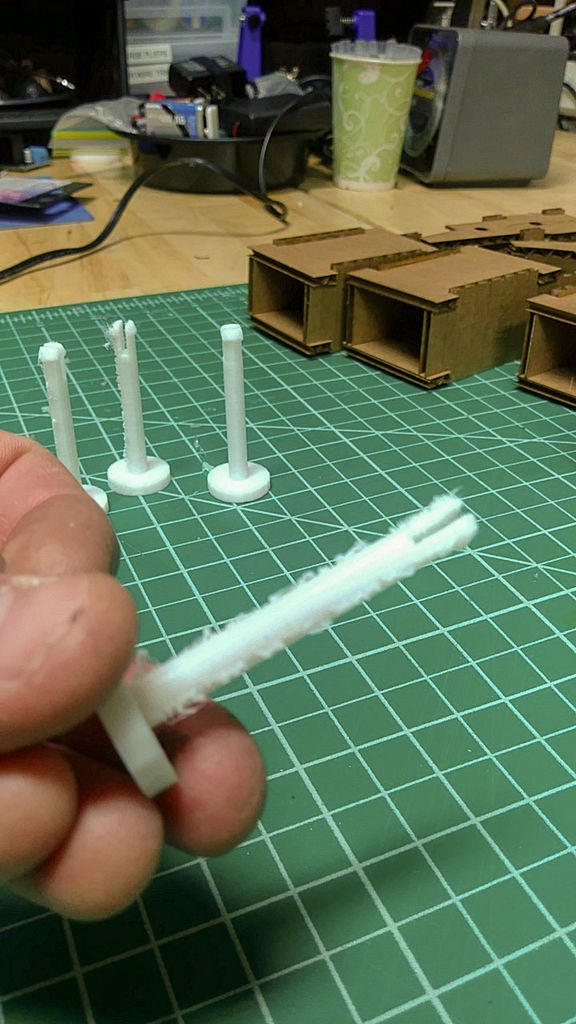
3D打印零件
只有要打印的部分是每個支腿的鉸鏈銷,可以用兩個紙緊固件代替。鉸鏈銷使得上腿和下腿非常容易組合,并且比紙緊固件更平滑。雖然,如果您無法使用3D打印機,紙張緊固件可以正常工作。 該文件采用stl格式。請參閱隨附的zip文件,了解所有必要的零件文件和代碼。
工具
熱膠槍
DIY工具包中的一個重要工具。這些可以從99美分商店,工藝品商店,家得寶,亞馬遜等商店購買。
膠槍棒
你需要一堆。很難說確切數量,但我估計我使用了10到15個常規(guī)尺寸。如果你愿意,你可以隨時購買更長的。
激光切割機技能磨坊NYC
這些更難獲得。它們的價格昂貴,需要通風。使用Google搜索創(chuàng)客空間以查找要使用的本地空間或搜索在線服務以將您的零件發(fā)送給您。紐約Skill Mill提供激光切割服務和課程。
3D打印機 Skill Mill NYC
與激光切割機相同。雖然這些年來的價格有所下降。我以低于300美元的價格買了一個,雖然確實需要進行大量的故障排除才能做到正確。像激光切割機一樣,有在線服務可以將您的零件發(fā)送給您或搜索您附近的創(chuàng)客空間。 Skill Mill NYC還提供3D打印服務和設計課程。
打孔器
實際刀具《剪刀
這些只是額外的工具,可能會派上用場。
第2步:組裝腿
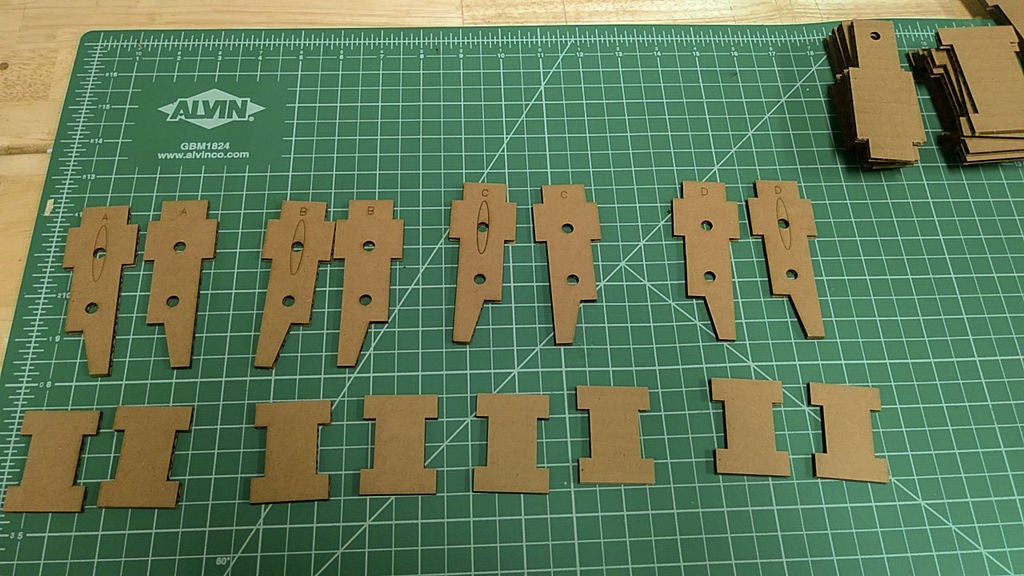


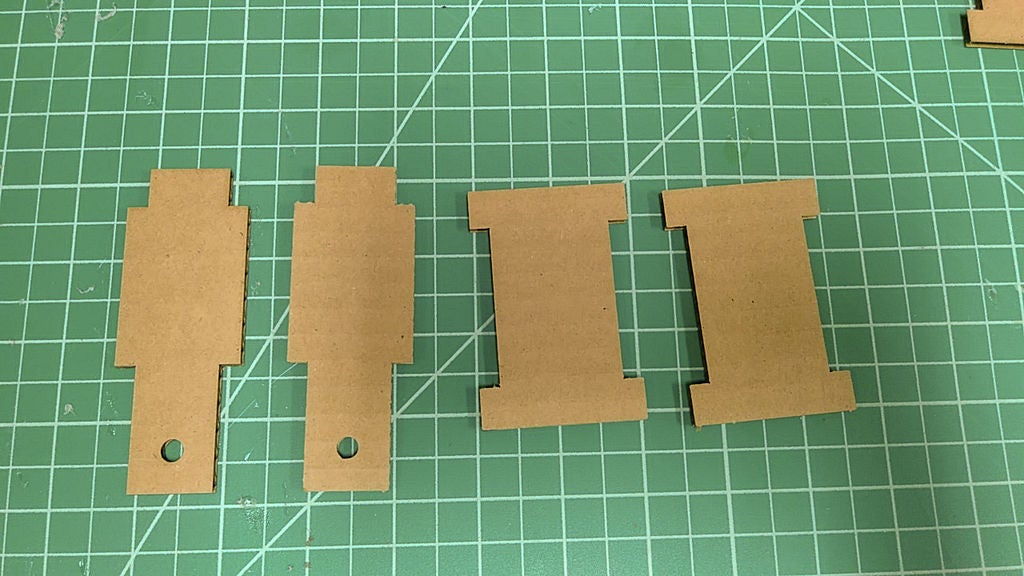



讓我們把腿放在一起。你將需要腿部,熱膠槍和3D打印部件。
我們將首先組裝大腿。按照這些說明和圖片一起使用。盡量不要過多地考慮這些。我試圖讓這個盡可能簡單地拼湊起來。真的只有兩個步驟,你可以出錯,所以需要注意細節(jié)。完成腿部A后,您只需要為剩下的3條腿重復這些步驟。
1。插上熱膠槍。
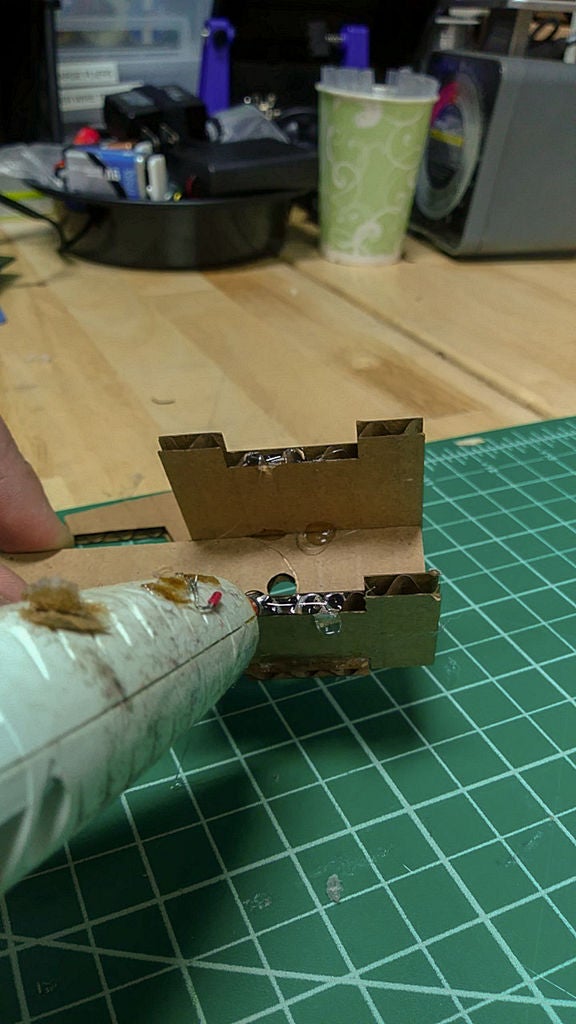
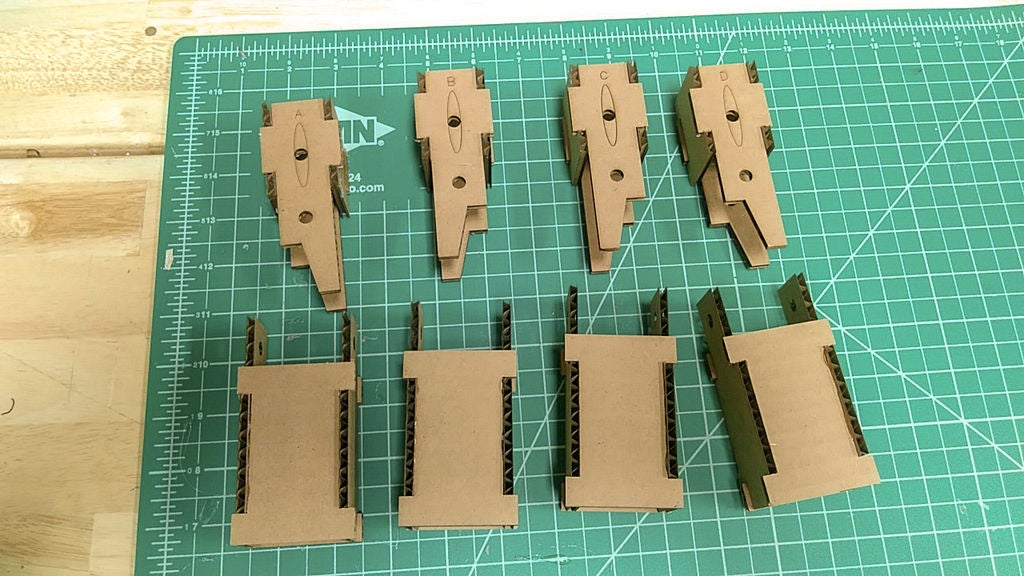
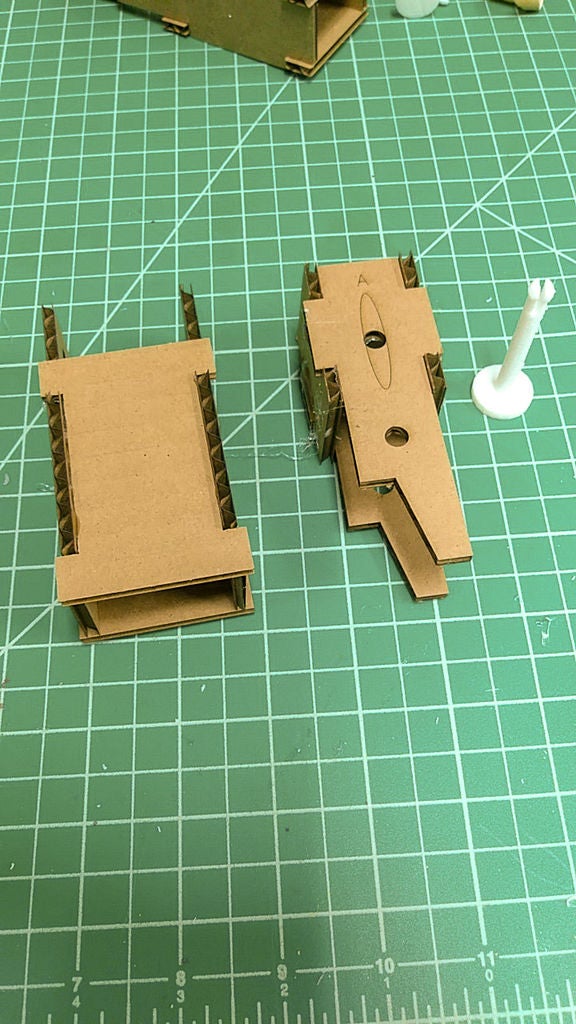
2。抓住標有A的兩個大腿部分和兩個小的I梁。
3。用A下面的橢圓和一個小I梁抓住上腿部分。
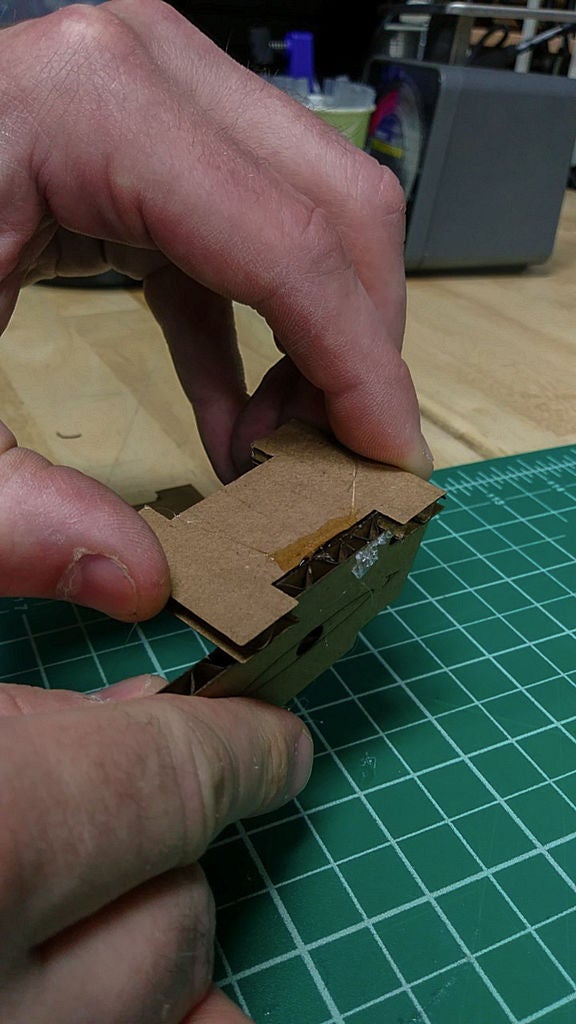
4。在I梁的凹痕旁邊放一條膠水。
5。將I梁的凹痕放在腿部A的翼片下面。
6。對第二個I梁重復此操作。
7。在I梁的每個凹痕上放一條膠水。
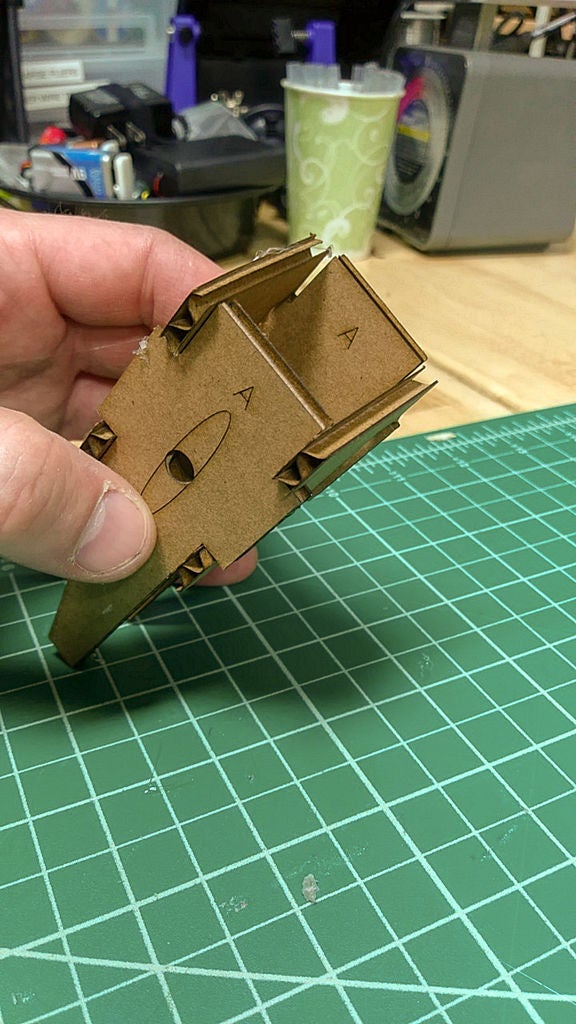
8。放置另一個大腿部分,使其標簽位于凹痕頂部,A面向另一條腿A部分的背面。當您將部件粘合在一起時,您將能夠看到腿部時看到的As。
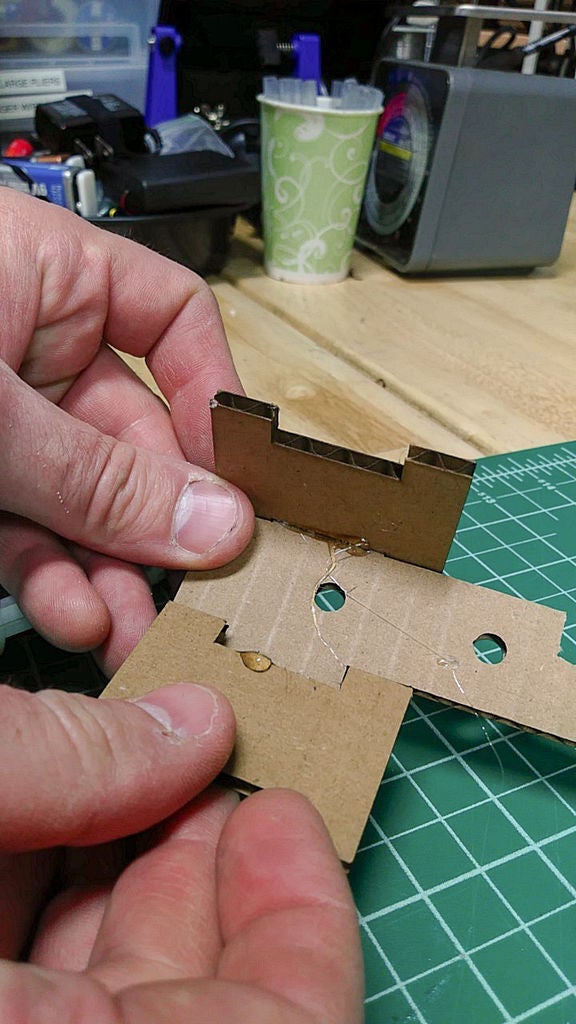
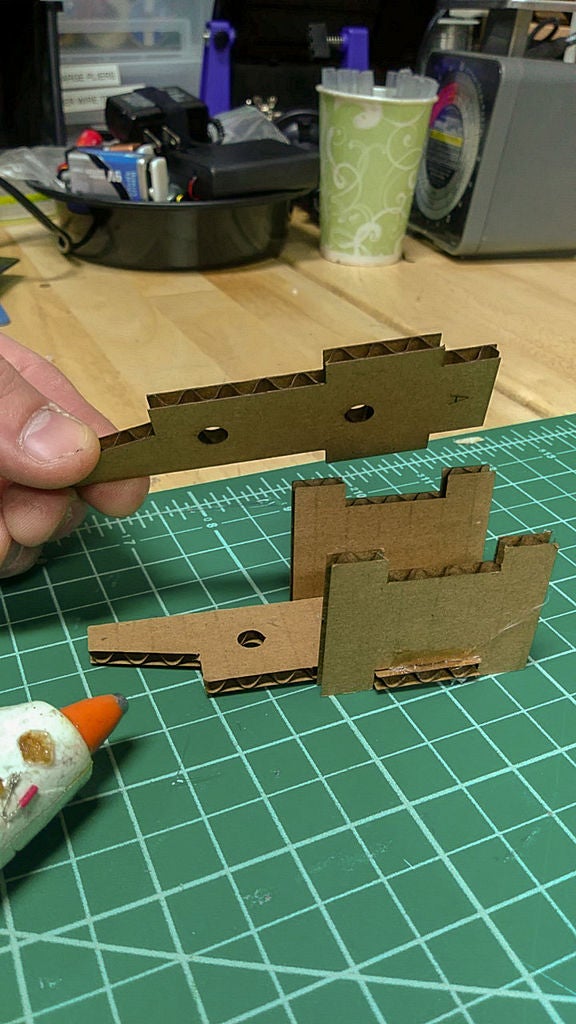
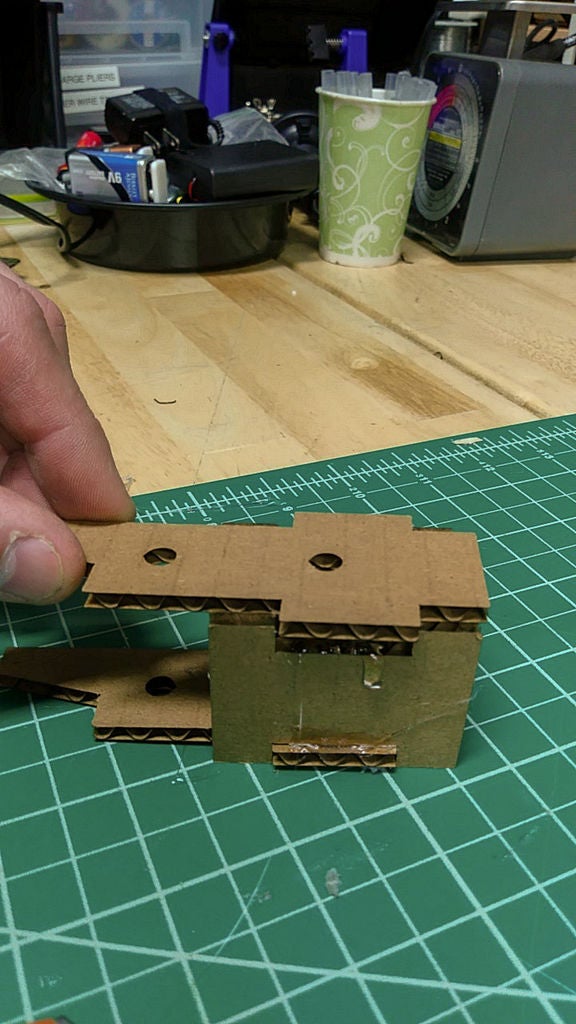
9。抓住兩個小腿部分和兩個大的I梁部分。
10。在一個大的I梁部分的凹痕中放置一行膠水。
11。將大I梁部分的凹痕放在下腿部分的舌片上。
12.對第二個大I梁部分重復步驟10和11。
13。在兩個大的I梁部分的凹痕上放一條膠水。
14。放置第二個小腿部分,使其突出部分位于兩個大I梁的凹槽中。
15。對剩余的腿部B,C和D重復步驟1到15.
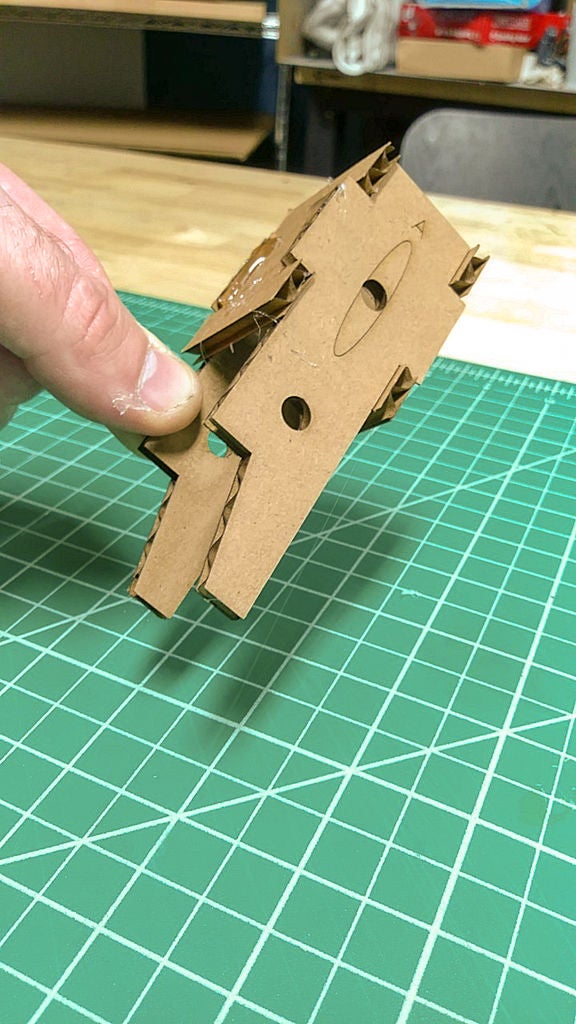
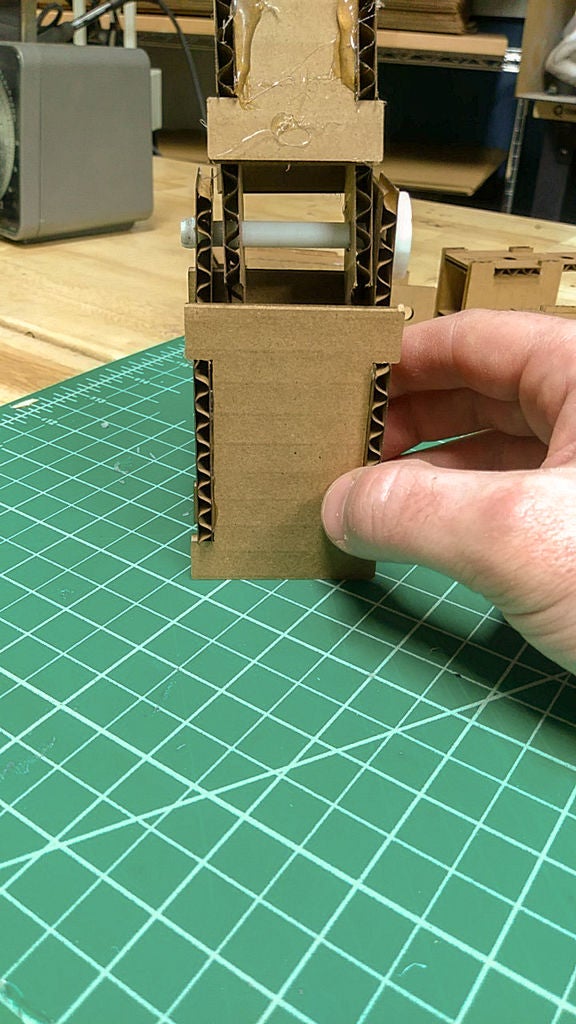
步驟3:組裝身體
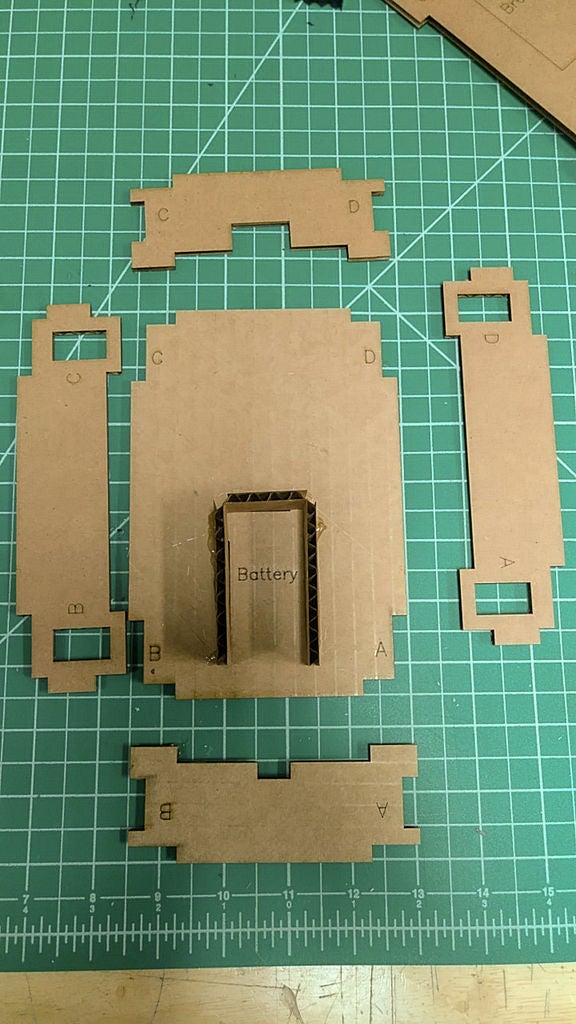





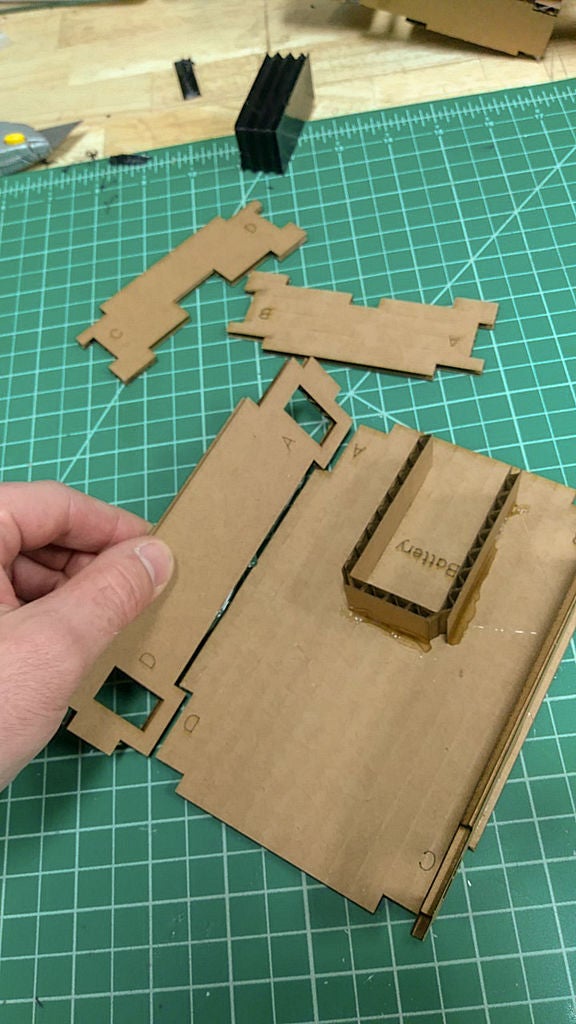
我們將組裝車身并將伺服電機粘合到位。
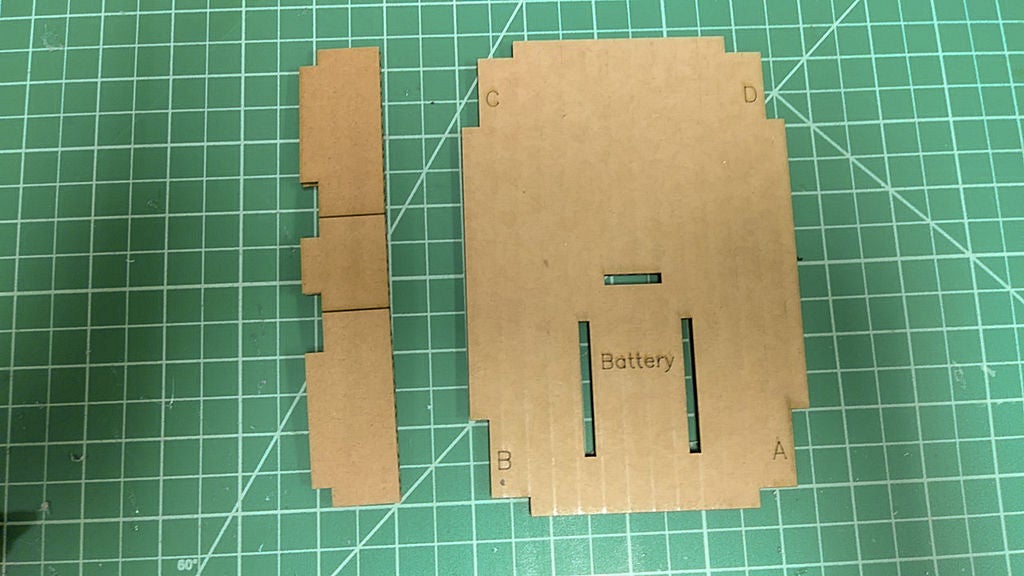
1。收集車身和4個伺服電機的零件。
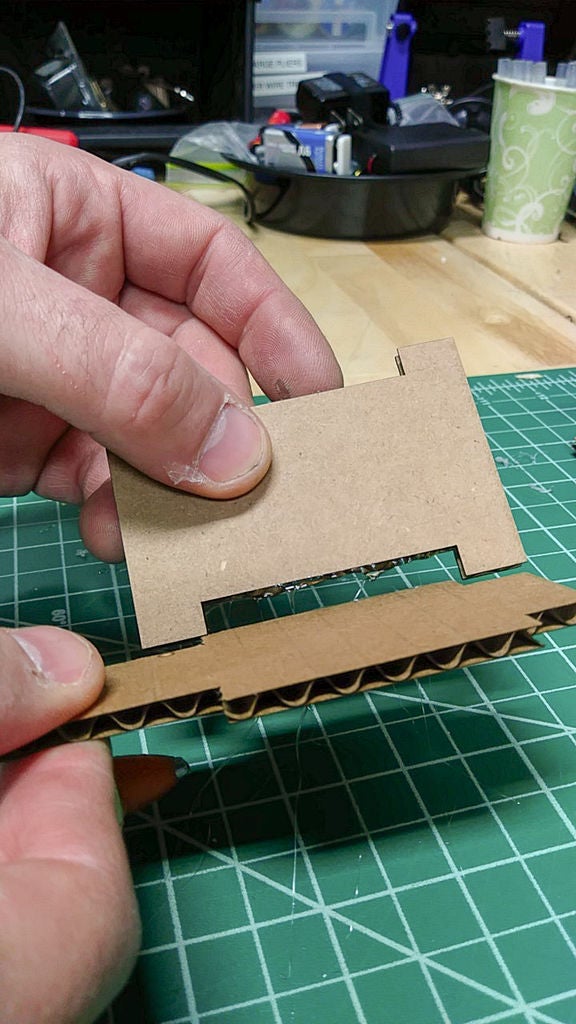
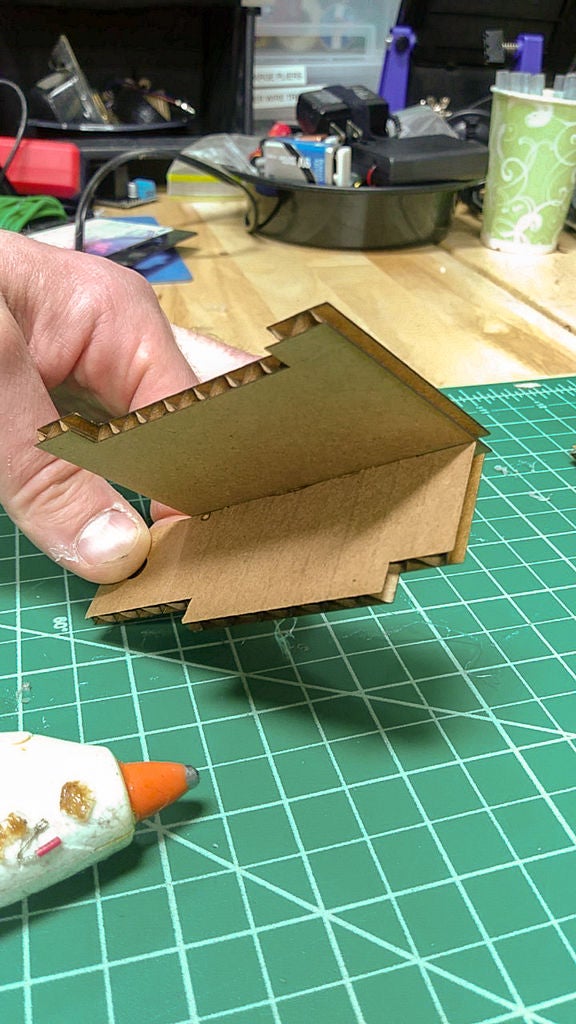
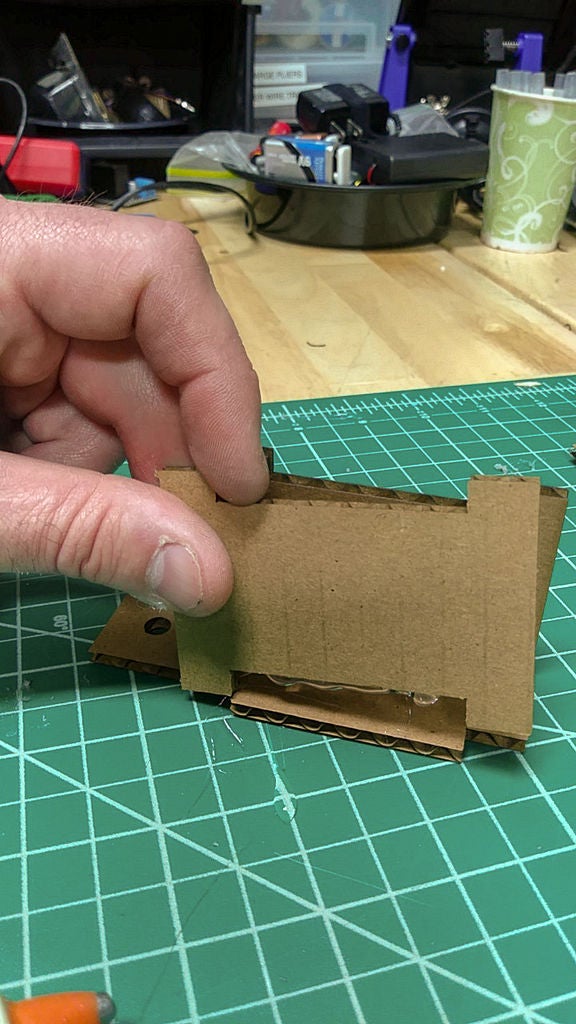
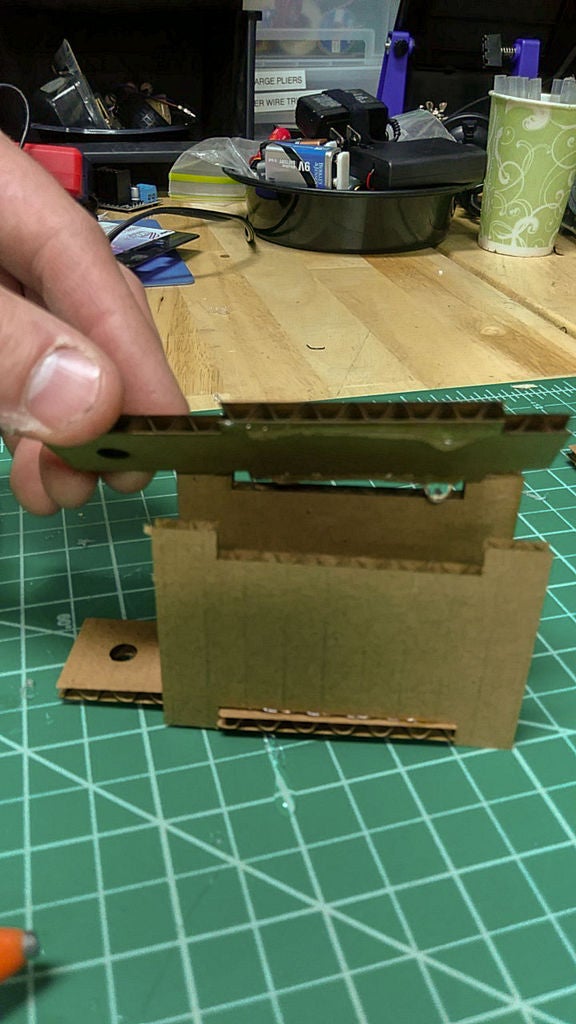
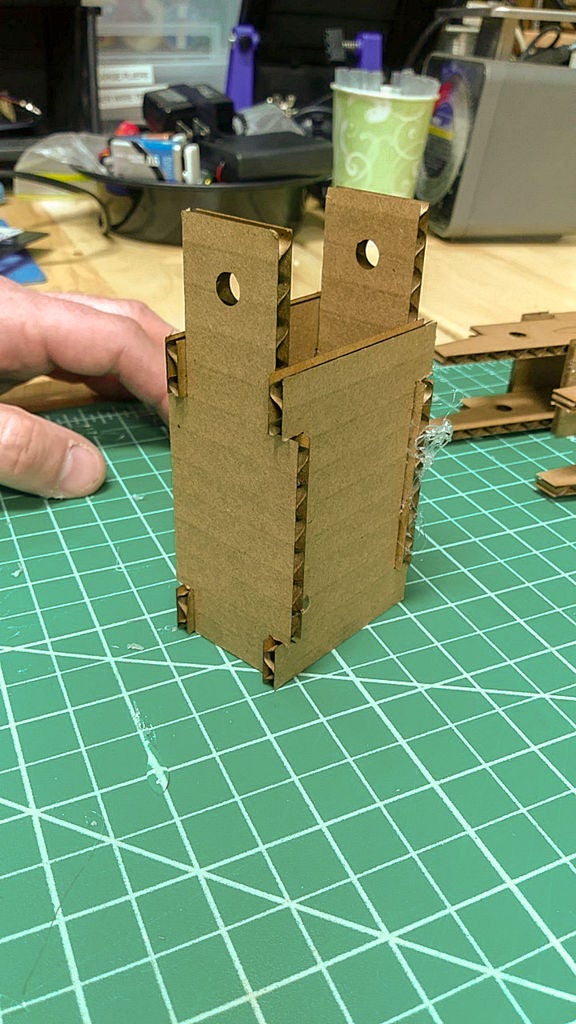
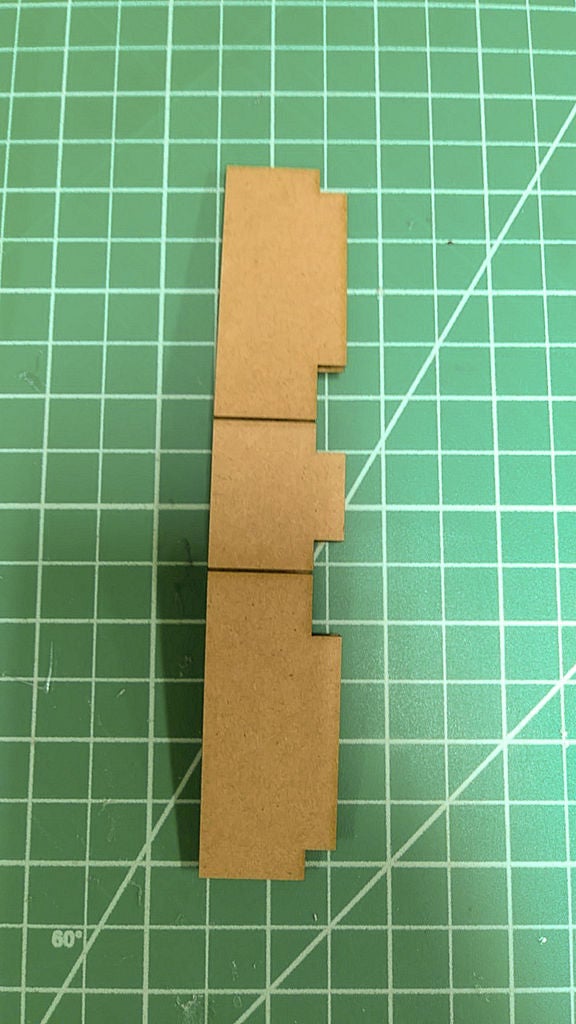
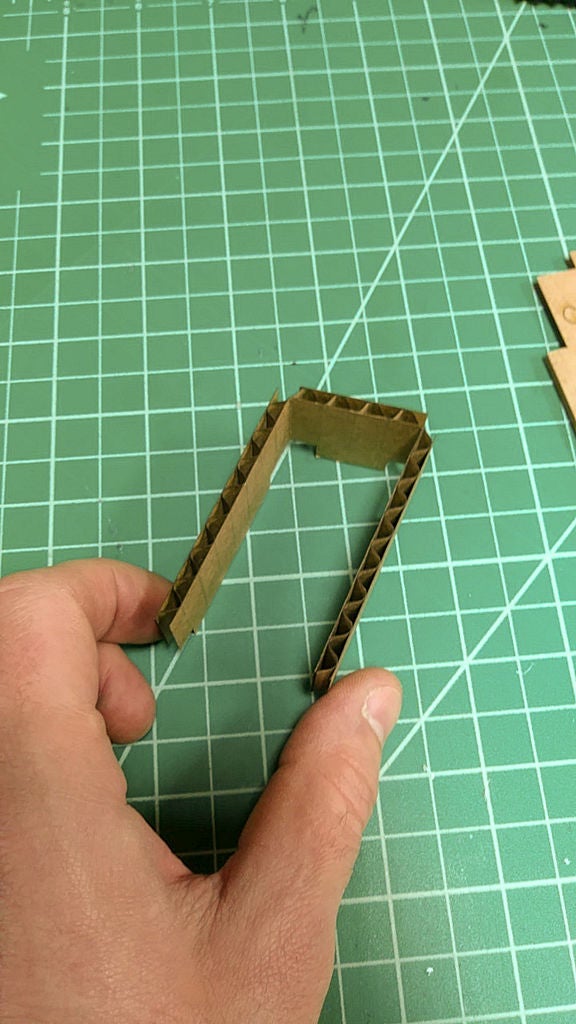
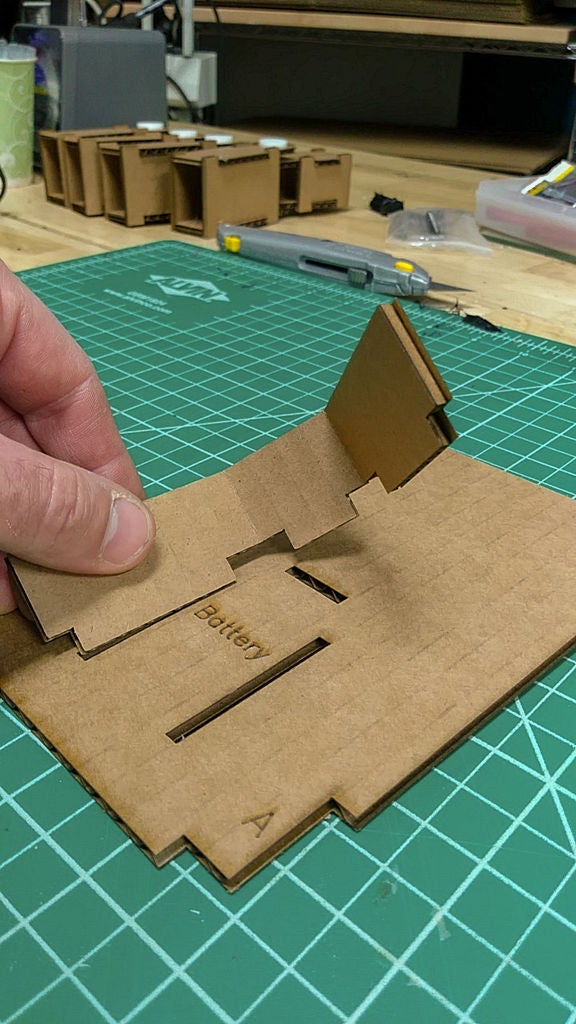
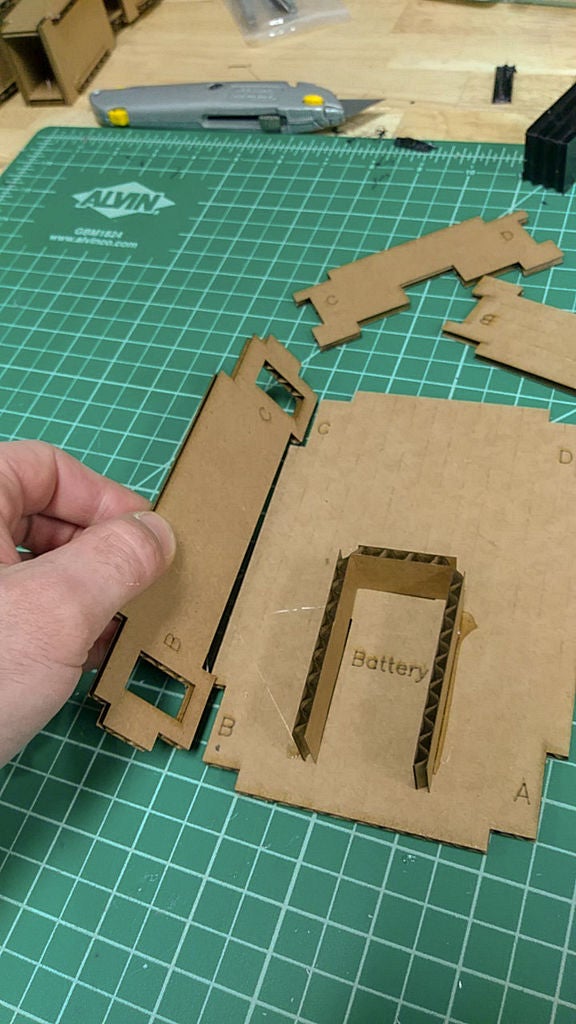
2。抓住電池盒壁部分并沿刻痕線折疊。
3。將電池盒壁的卡舌放入主體底座部分的插槽中。如果您在使標簽移動到位時遇到一些問題,請用拇指和指針輕輕按下標簽,使標簽形成楔形。這有助于將電池壁安裝到位。
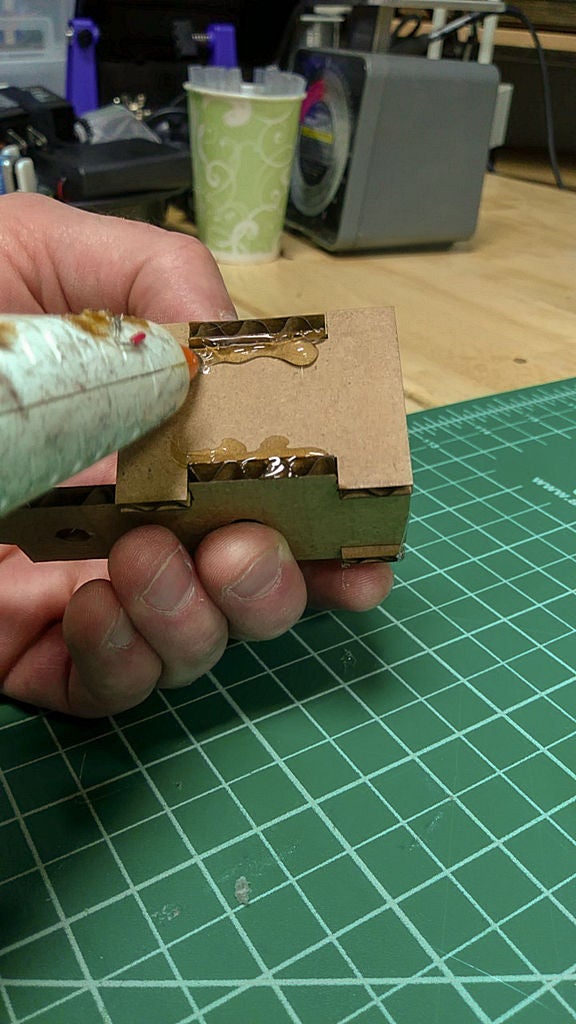
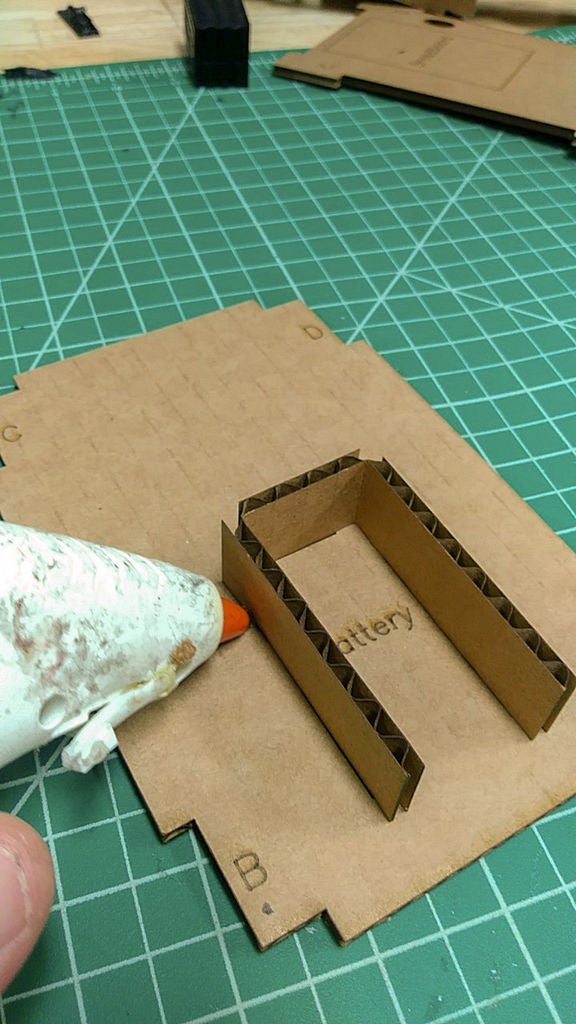
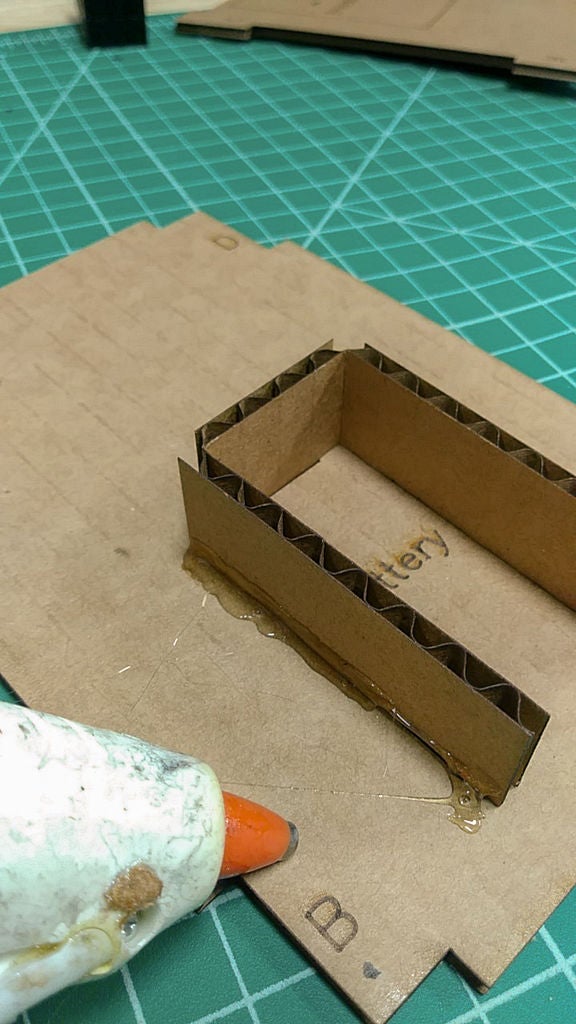
4。沿墻壁底部放置一排膠水,將電池墻固定到位。
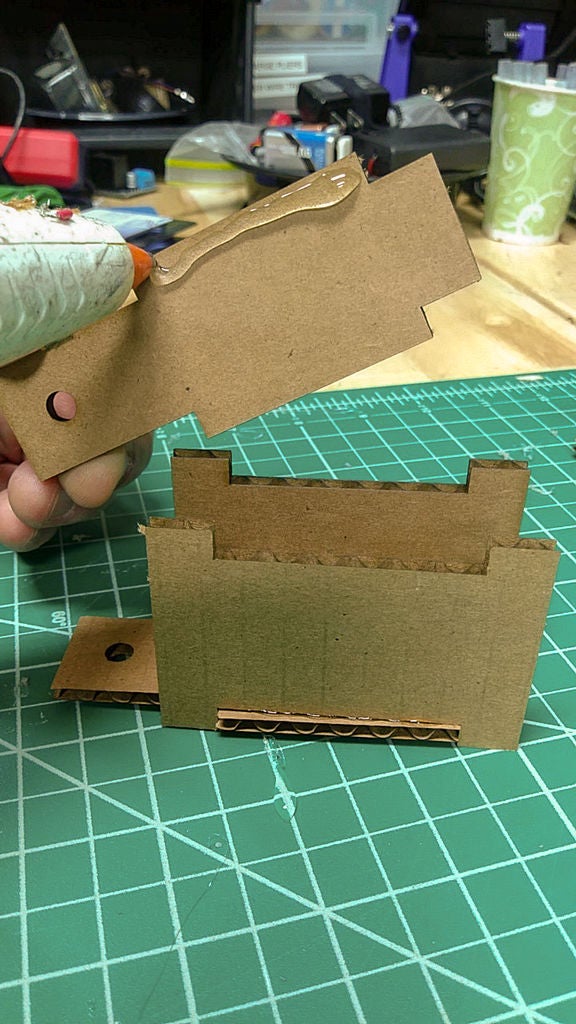
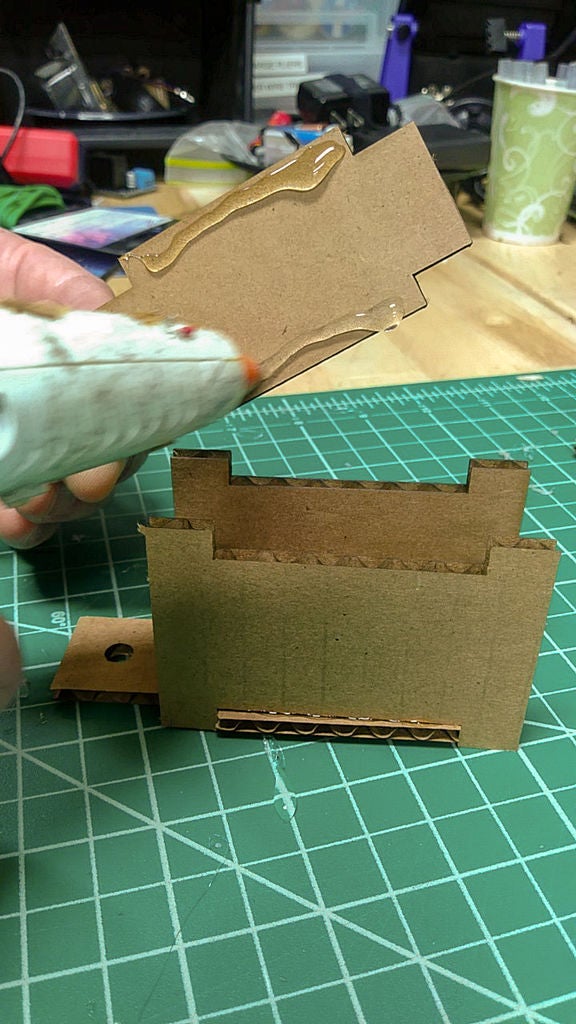
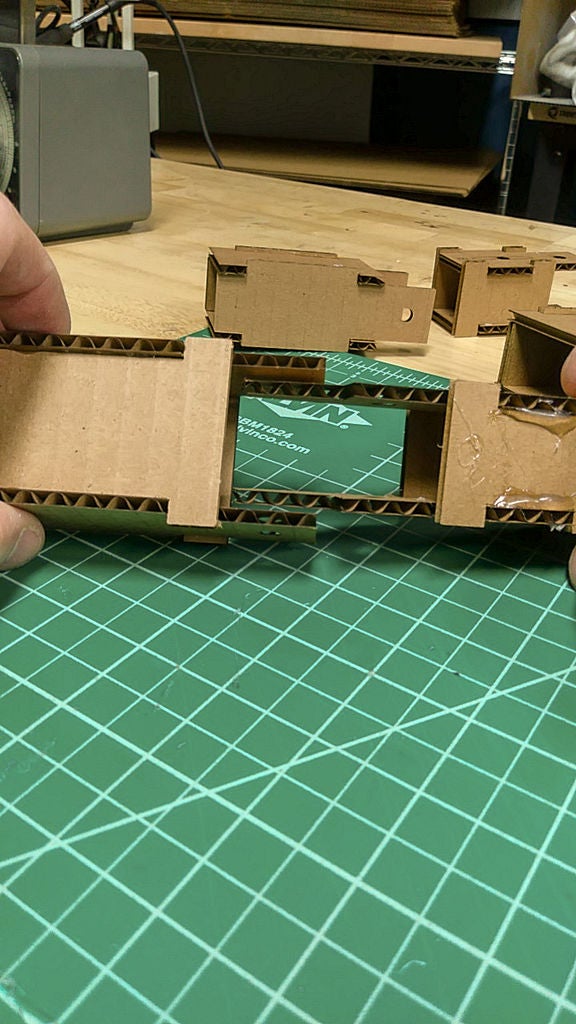
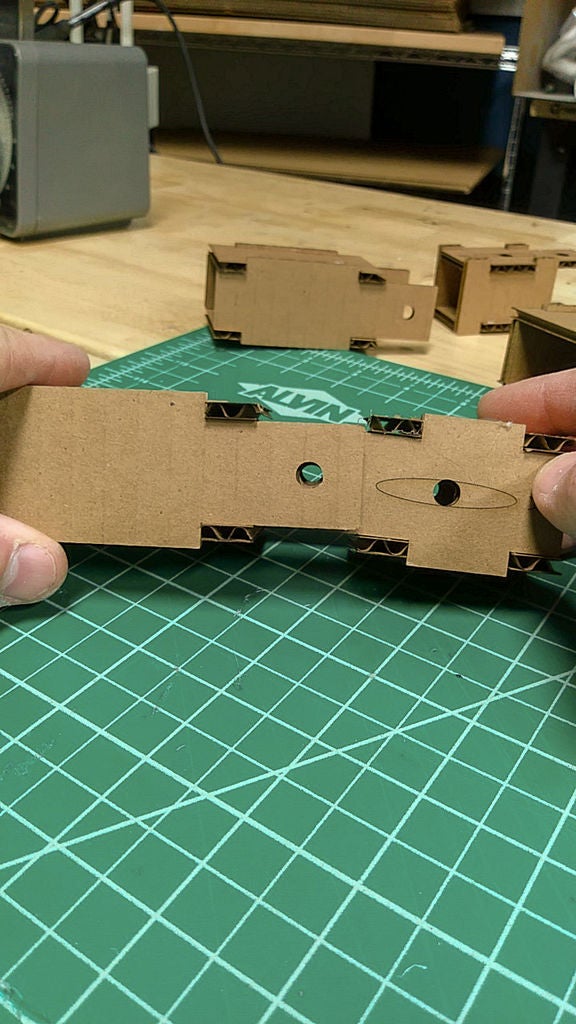
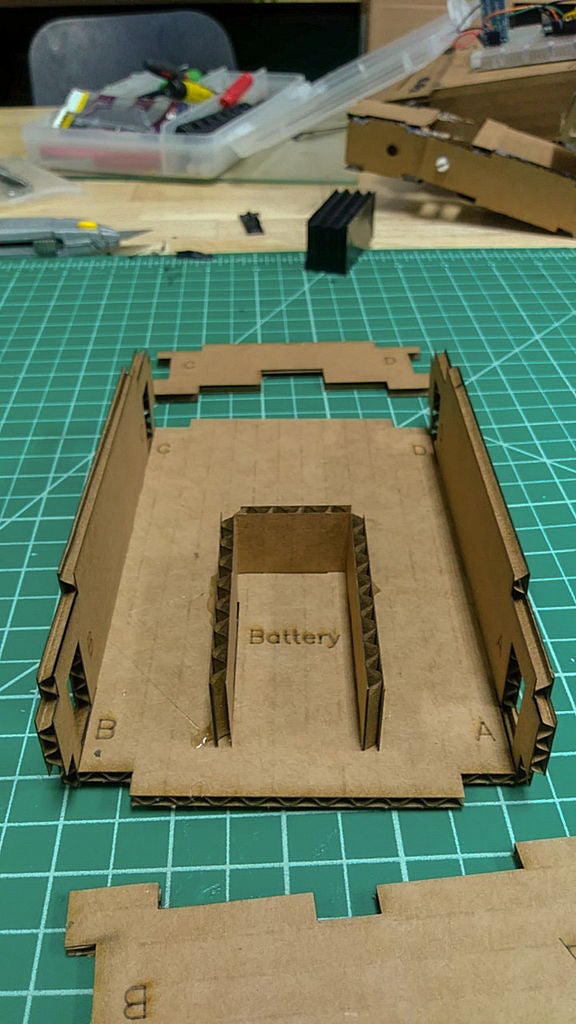
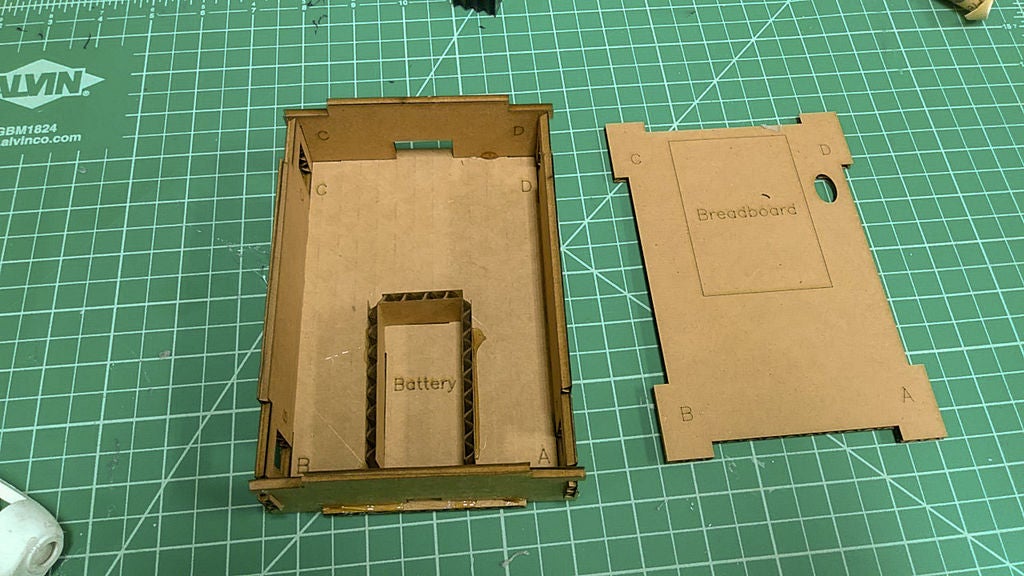
5。用B和C標簽抓住側壁,沿其凹痕放置一排膠水。
6。將此側壁的凹口放在底座的凸耳上。側壁的B和C應與基部的B和C對齊。
7.用A和D標簽抓住側壁,沿其凹痕放置一排膠水。
8。將此側壁的凹口放在底座的凸耳上。側壁的A和D應與基部的A和D對齊。
9。用B和D標簽抓住側壁,沿其凹痕放置一排膠水。
10。將此側壁的凹口放在底座的凸耳上。側壁的B和D應與基部的B和D對齊。
11。用A和C標簽抓住側壁,沿其凹痕放置一排膠水。
12。將此側壁的凹口放在底座的凸耳上。側壁的A和C應與基部的B和D對齊。
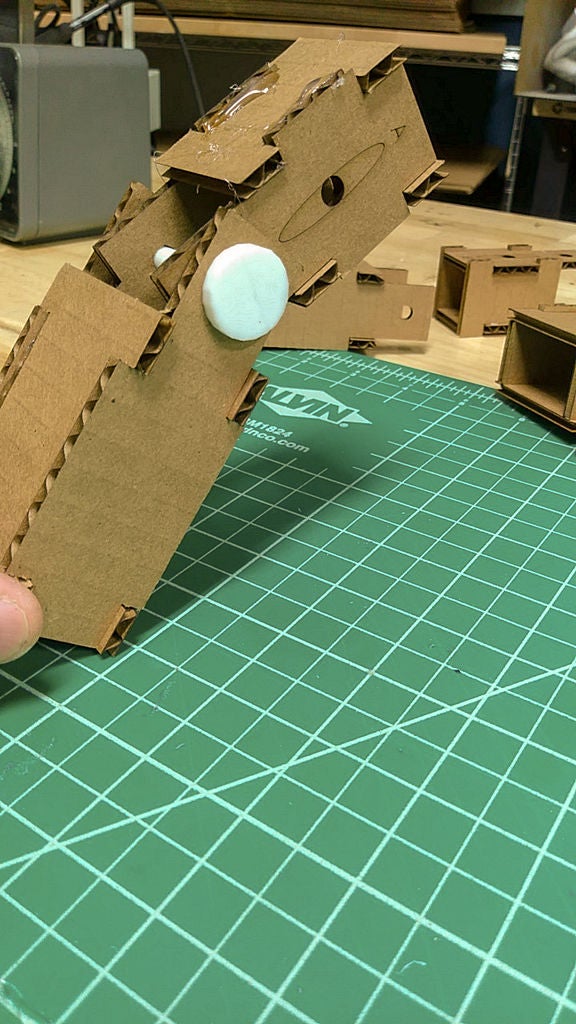
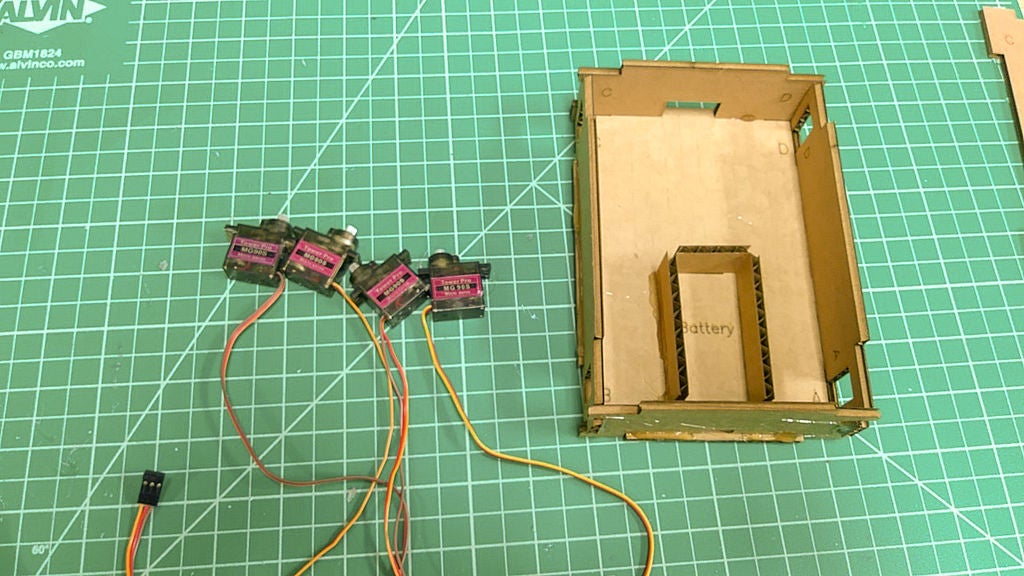
13。抓住其中一個伺服電機。
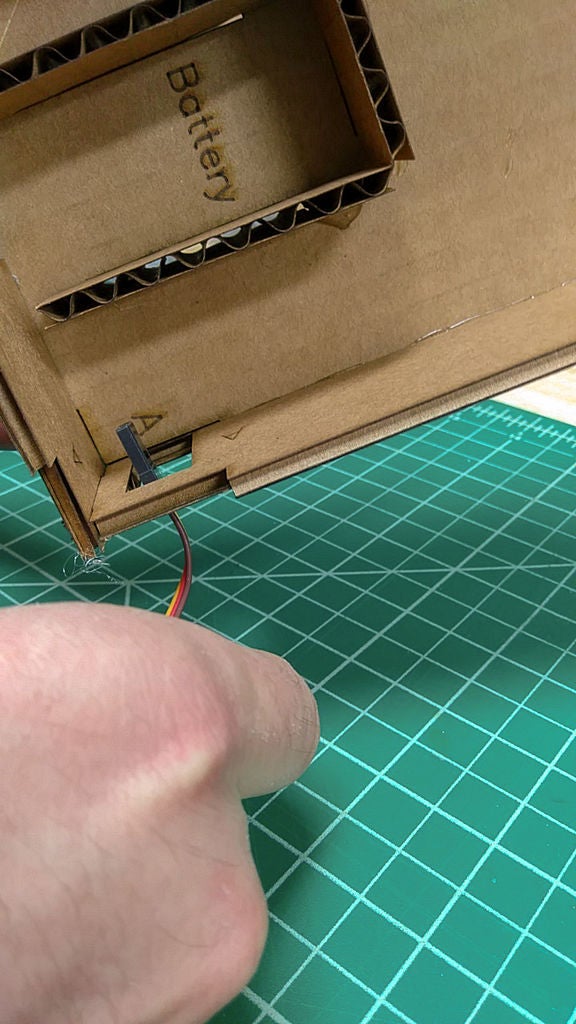
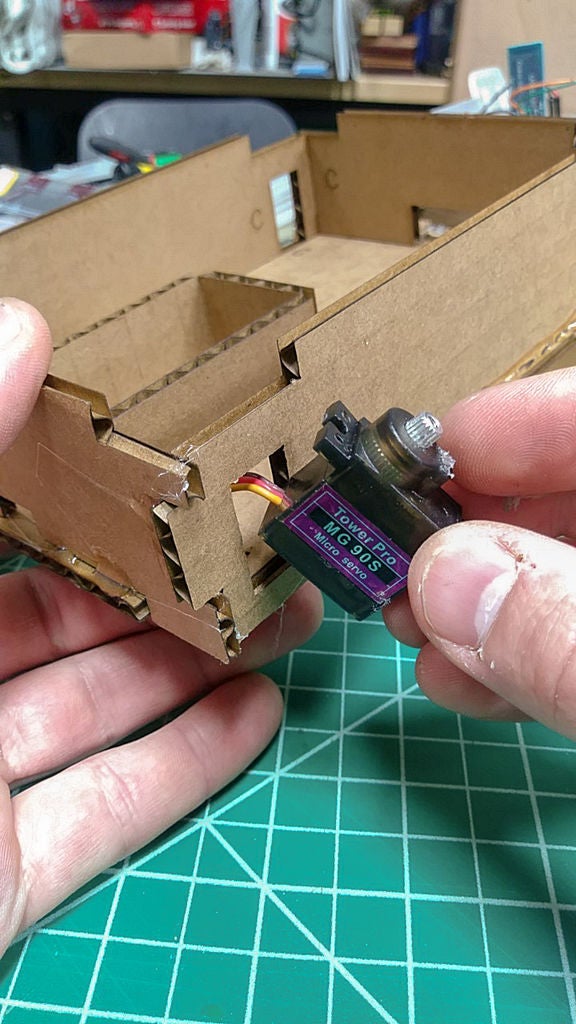
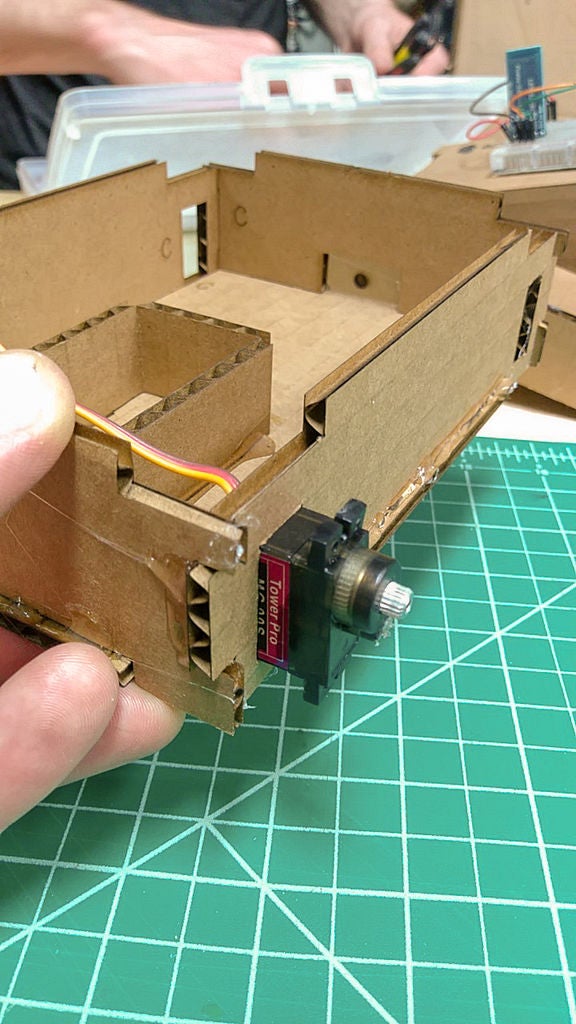
14。將伺服電線穿過側壁標記為A的孔。
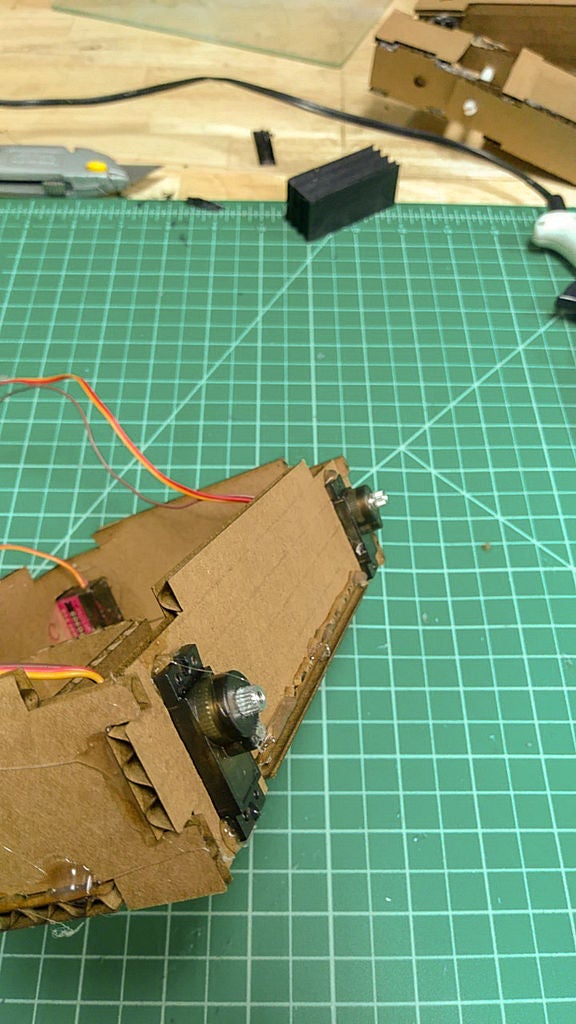
15。這一部分至關重要,請按照圖片進行參考。對齊伺服電機,使其側面及其導線朝上。
16。將一小滴膠水放在側壁上,位于伺服電機兩個卡舌的下方。
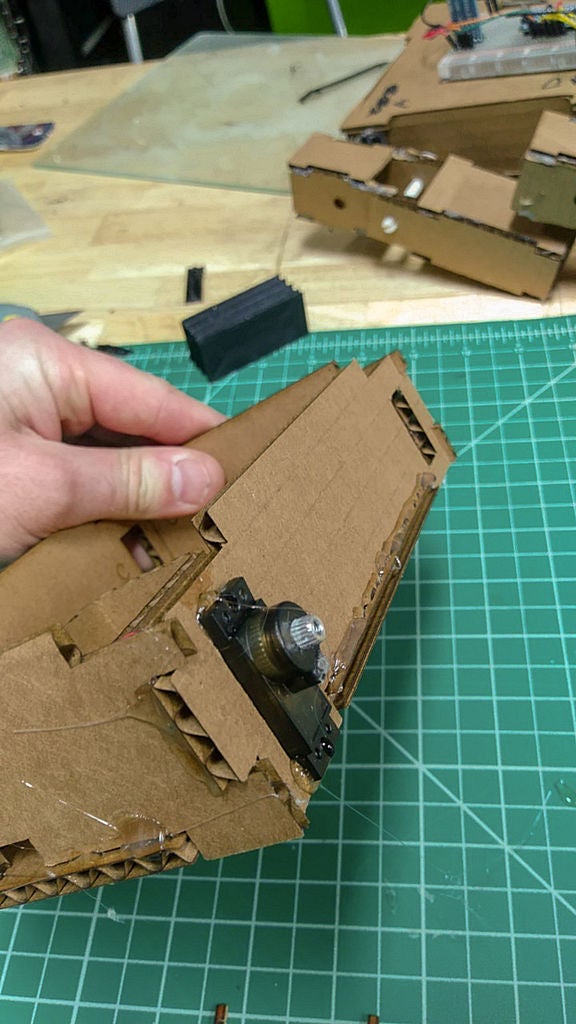
17。將伺服電機按入側壁,將其固定到位。
18。重復步驟14到17.
伺服電機的方向很重要,因為代碼假定伺服電機的方向是導線朝上。如果您碰巧將它們粘貼在相反方向,則可以調整代碼以使此方向起作用。
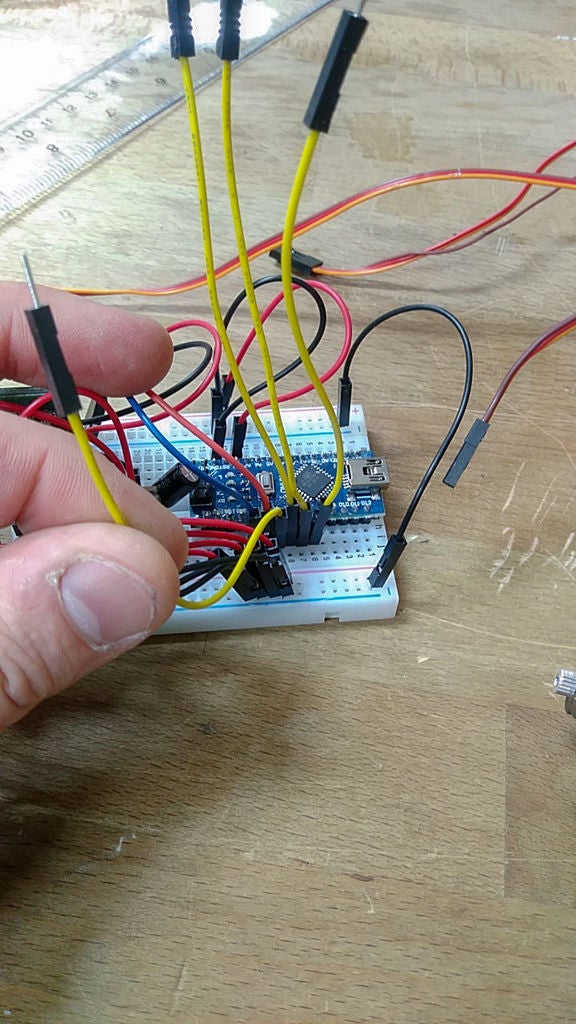
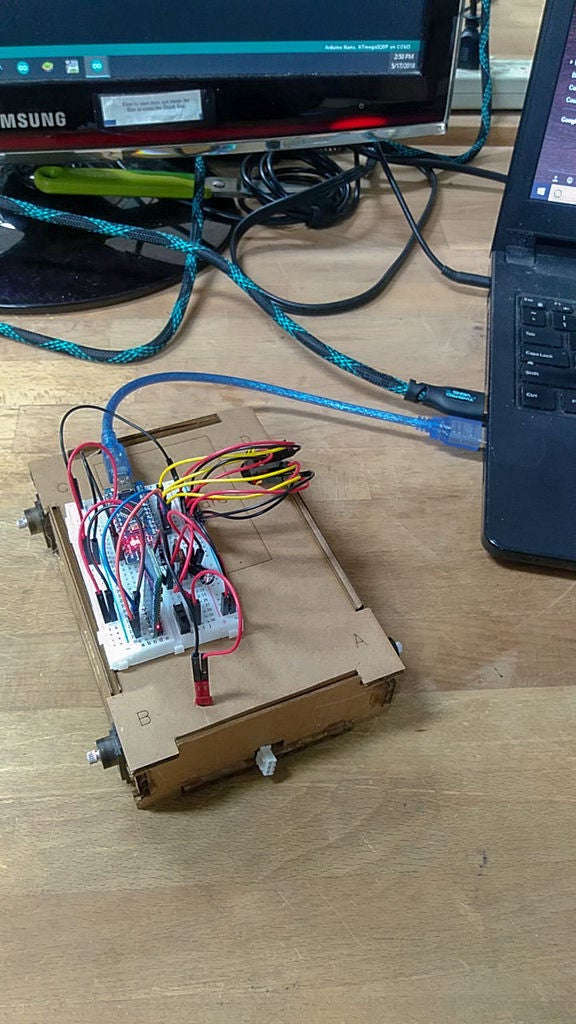
步驟4:組裝面包板

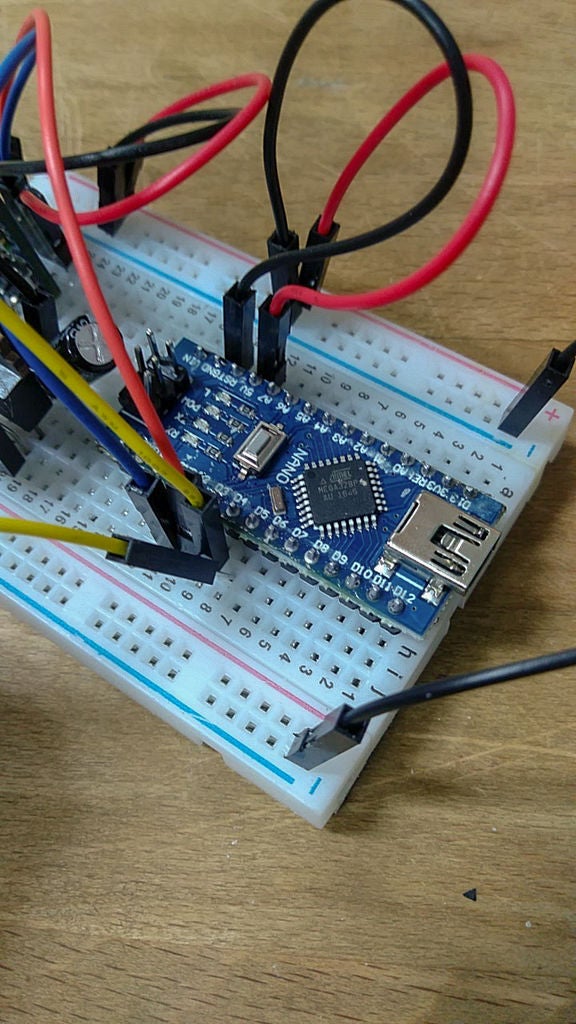
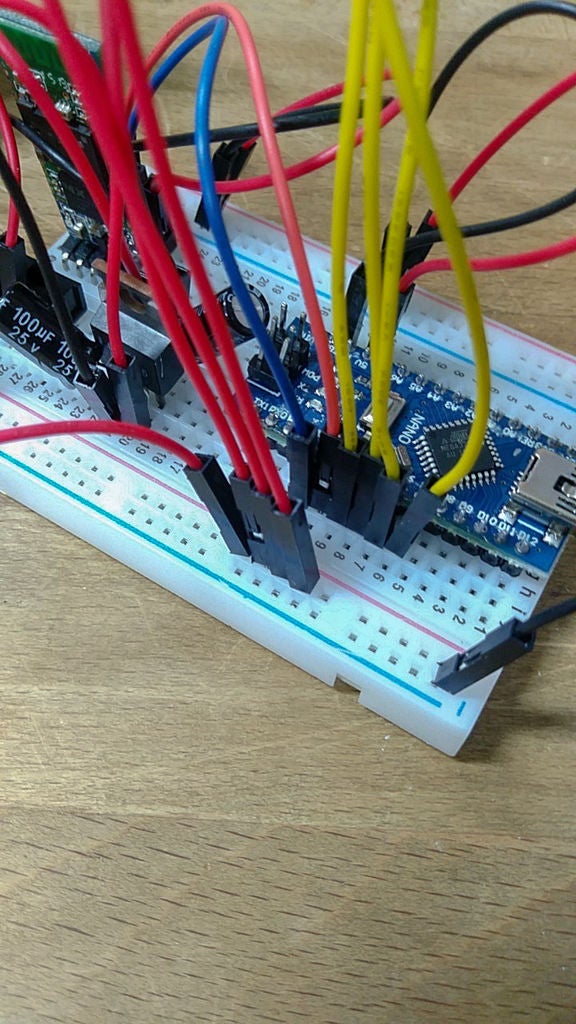
將腿和身體放在一邊。我們打算在面包板上組裝電子產品。
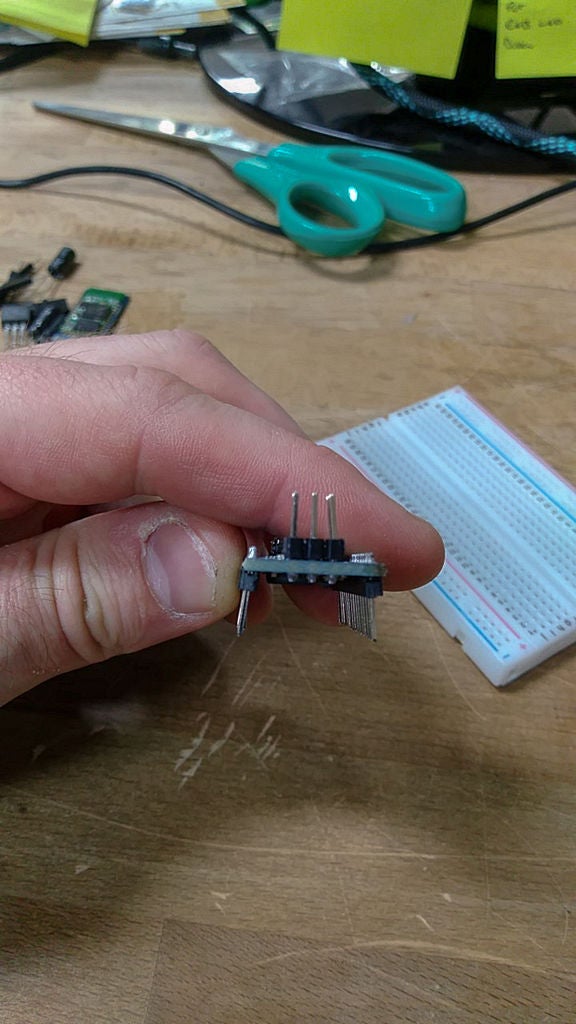
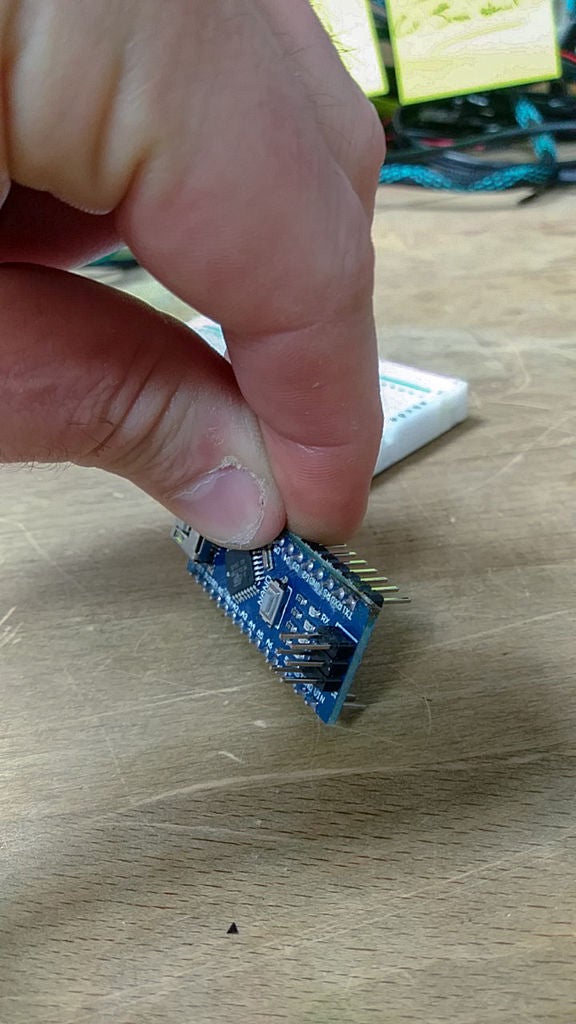
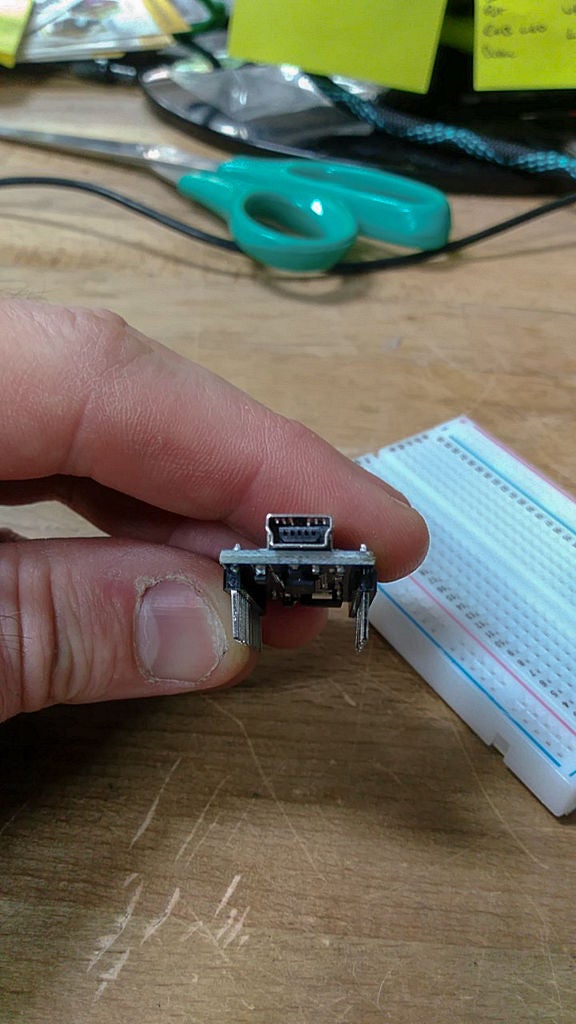
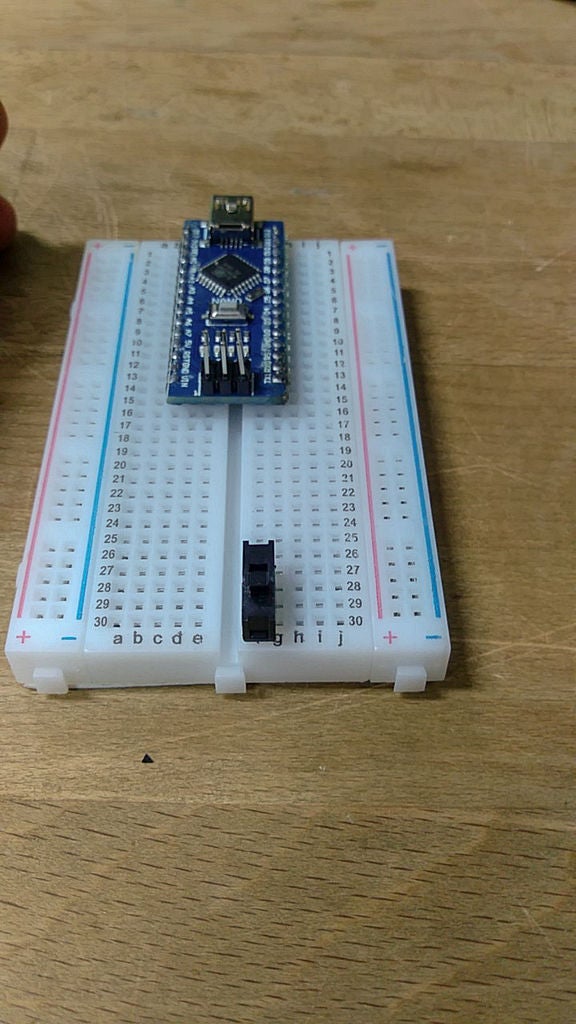
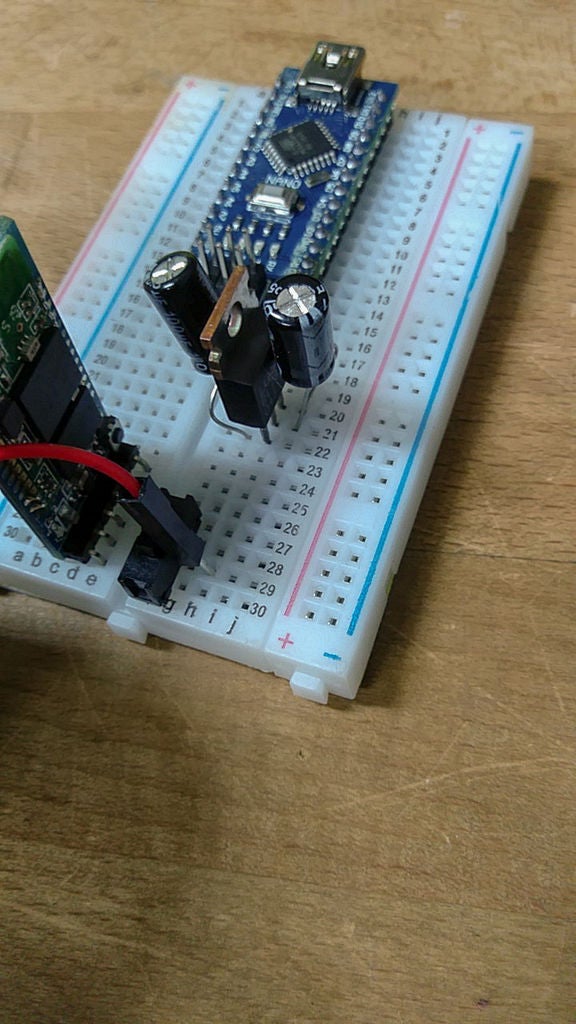
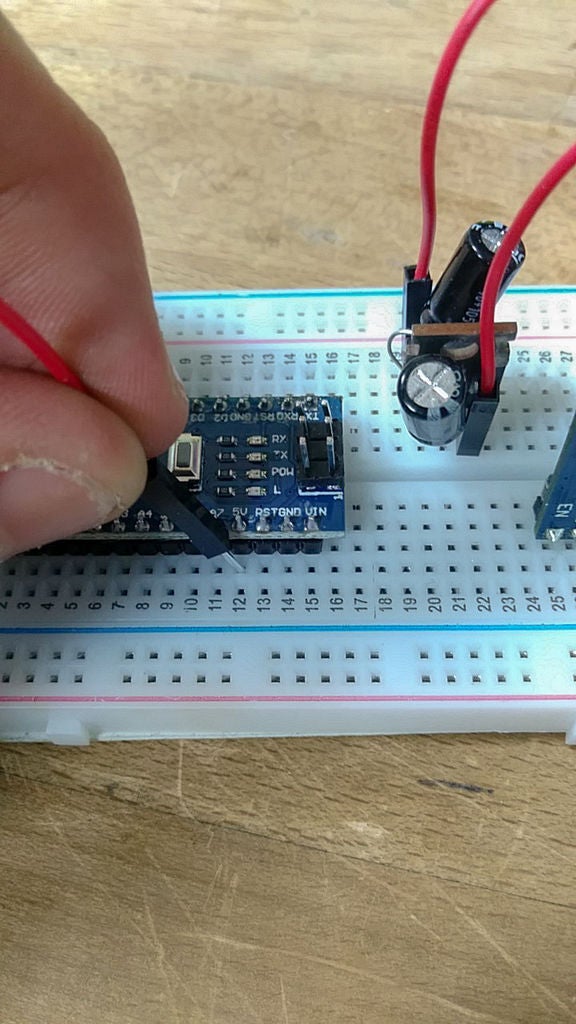
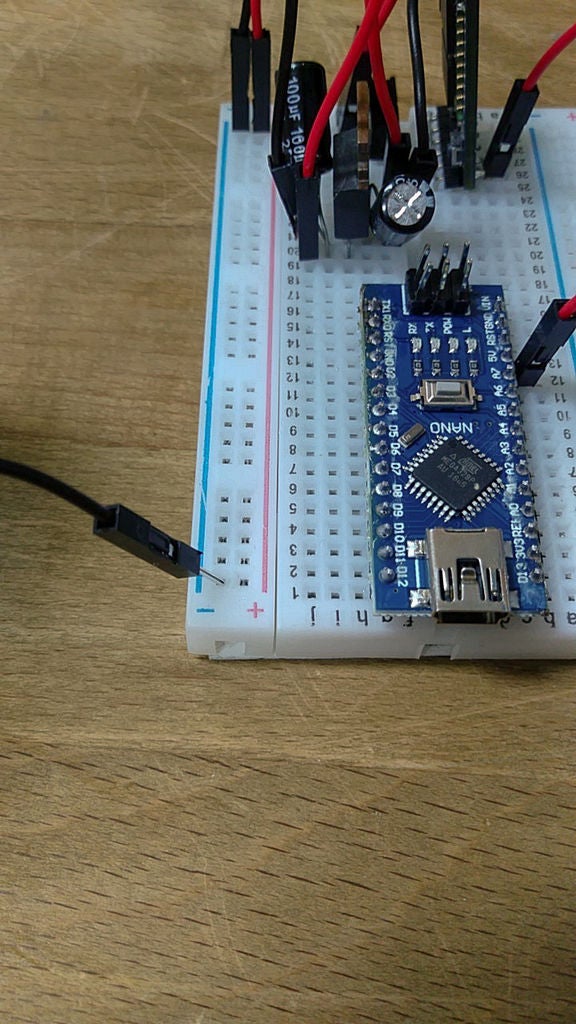
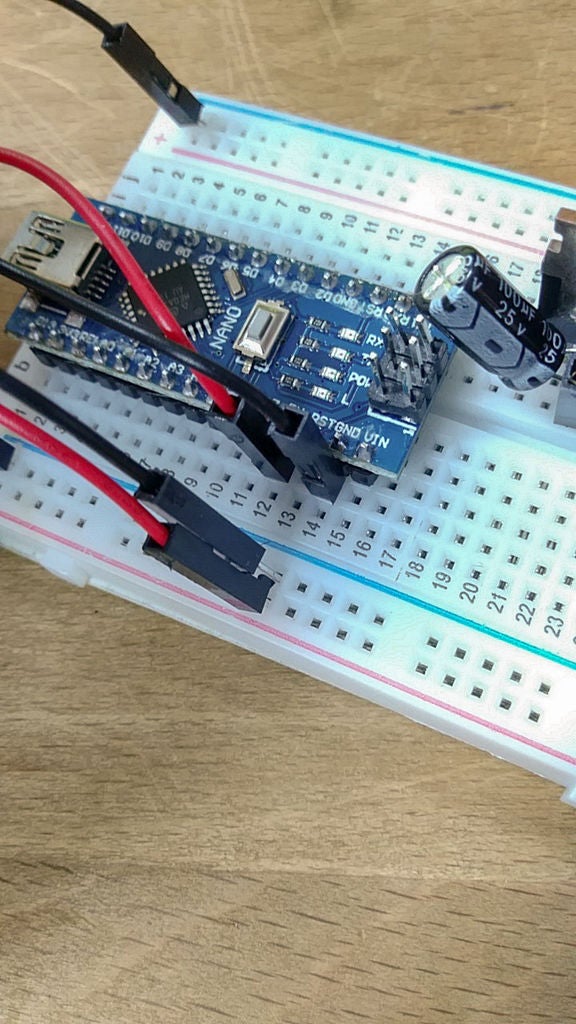
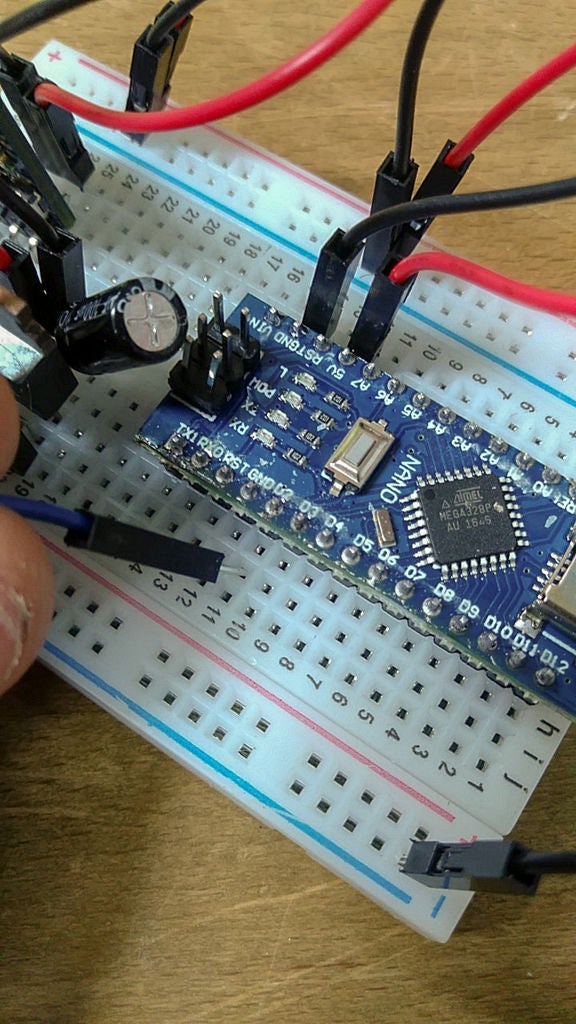
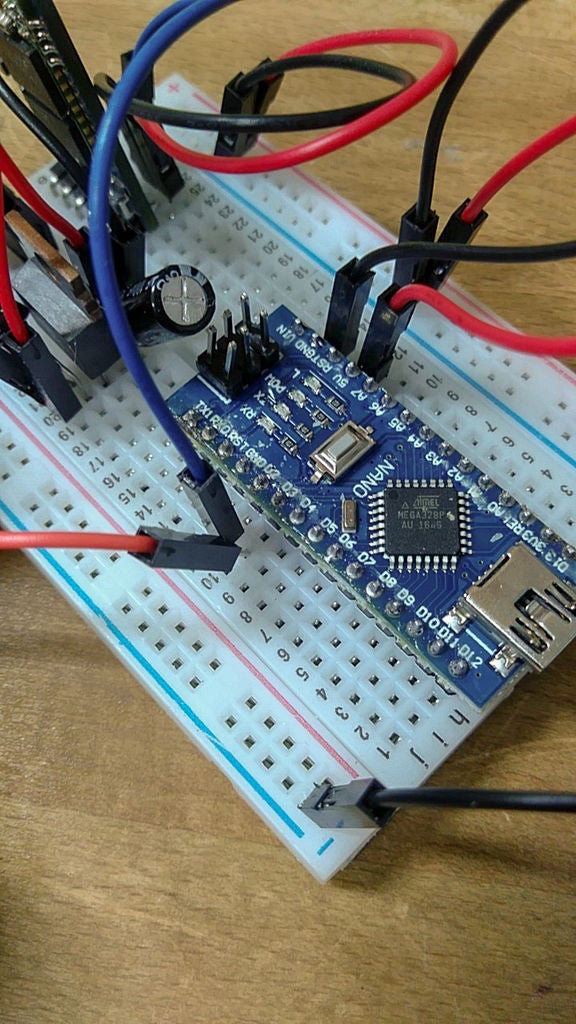
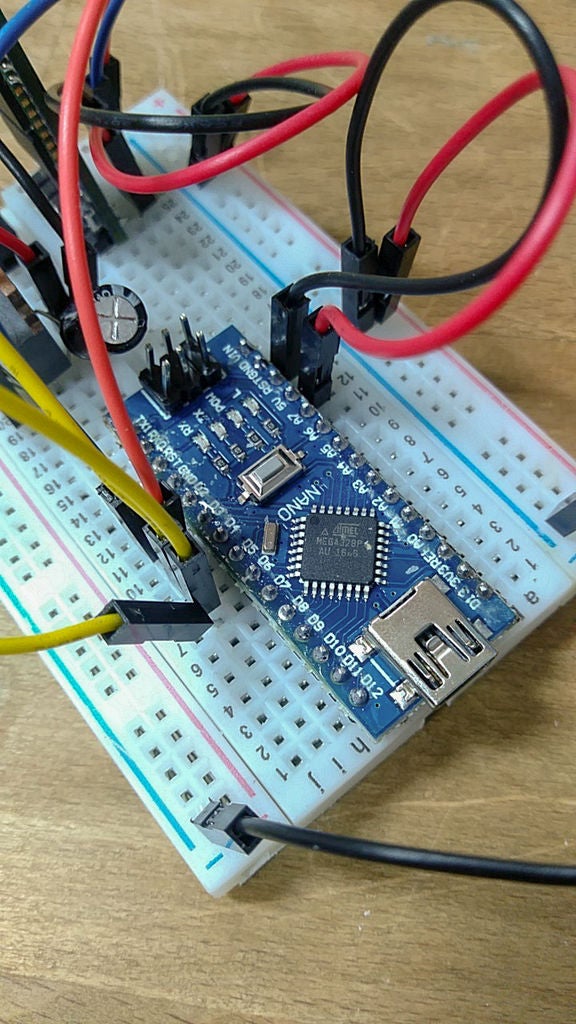
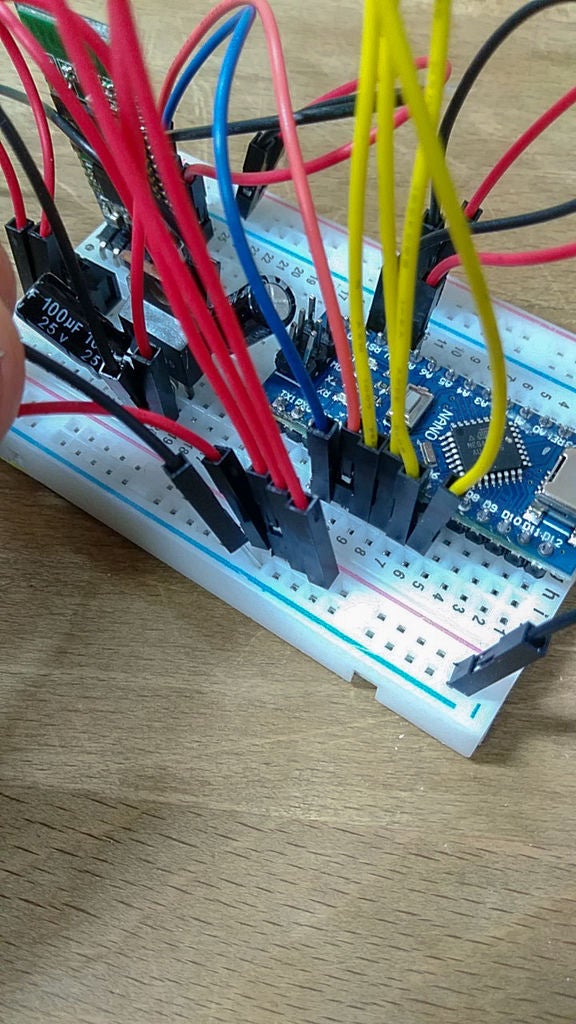
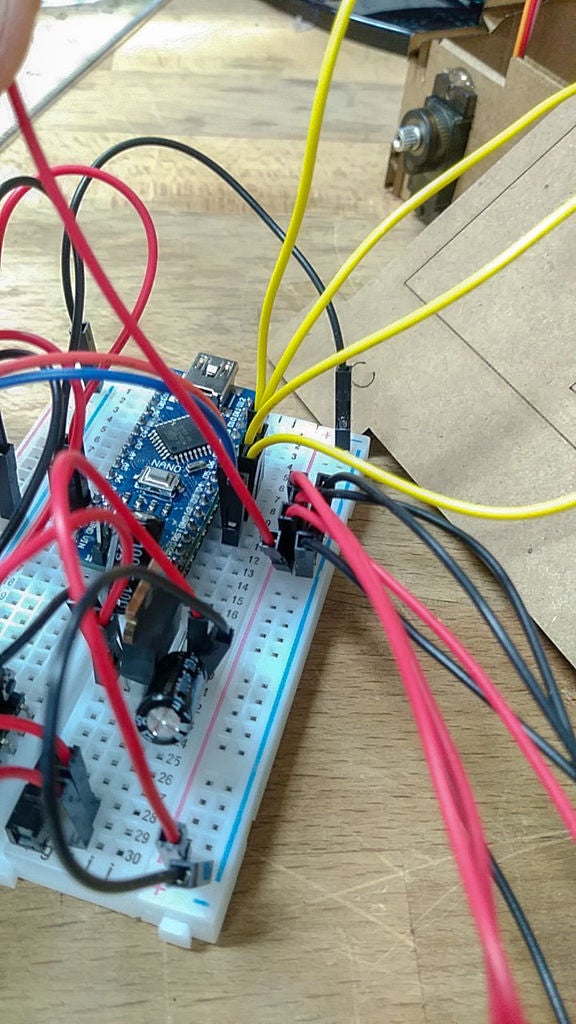
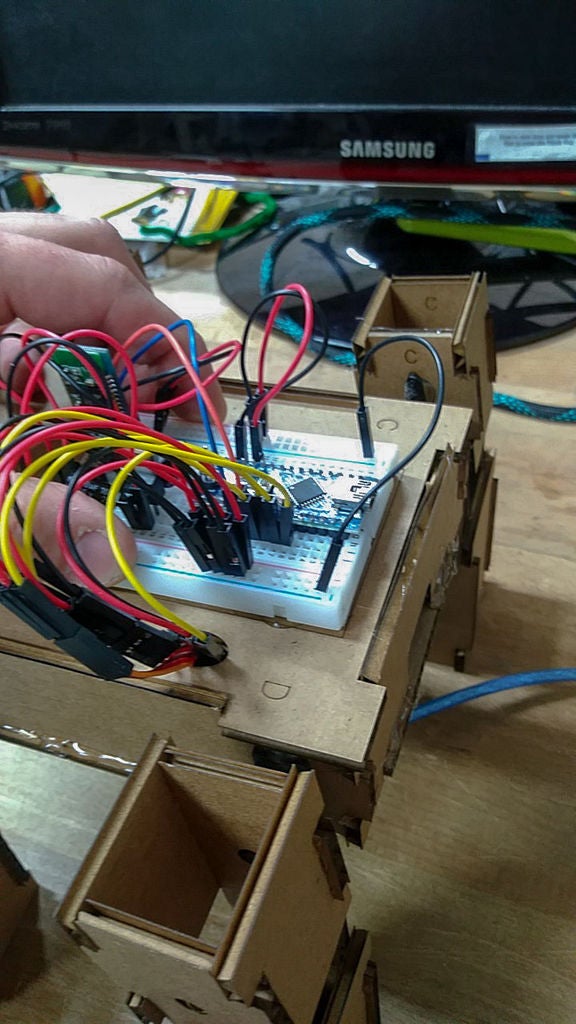
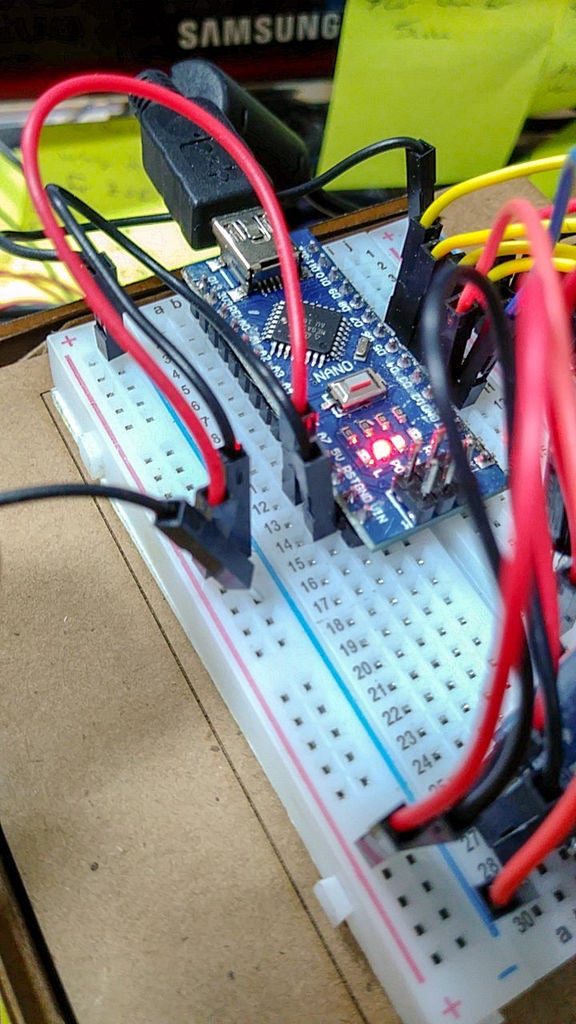
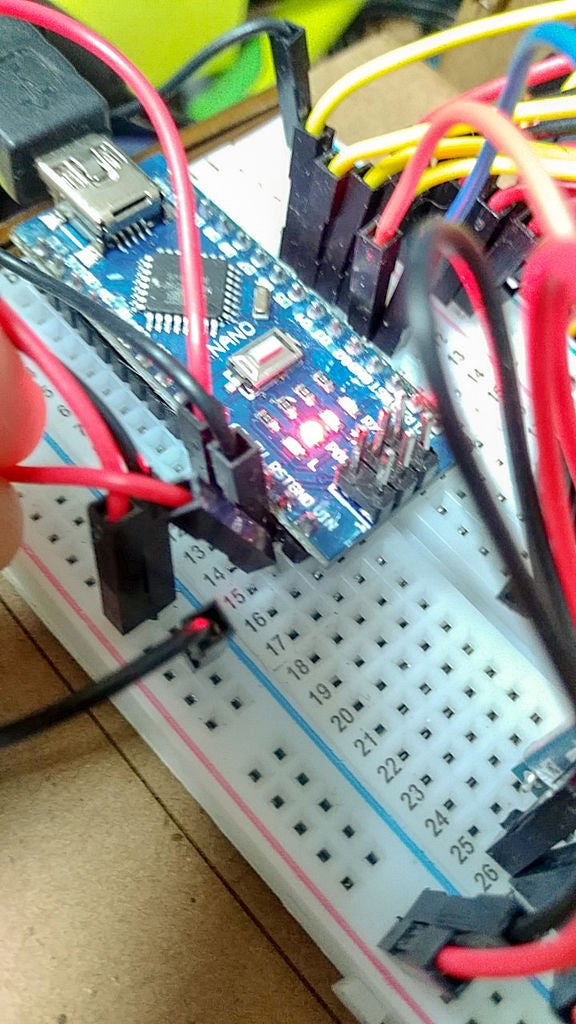
快速提示。如果您在將Nano納入面包板時遇到一些麻煩,請查看針腳。在第二張照片中,您可以看到針腳呈一定角度。 Nanos通常都是這樣的。你支付廉價Arduinos的價格。
一個簡單的解決方法是將Nano的針腳放在像桌面這樣的堅硬表面上,然后輕輕地將Nano壓入桌面。這將立刻拉直所有引腳。為對方做這件事。
請輕輕按壓!你不想打破電路板上的引腳。
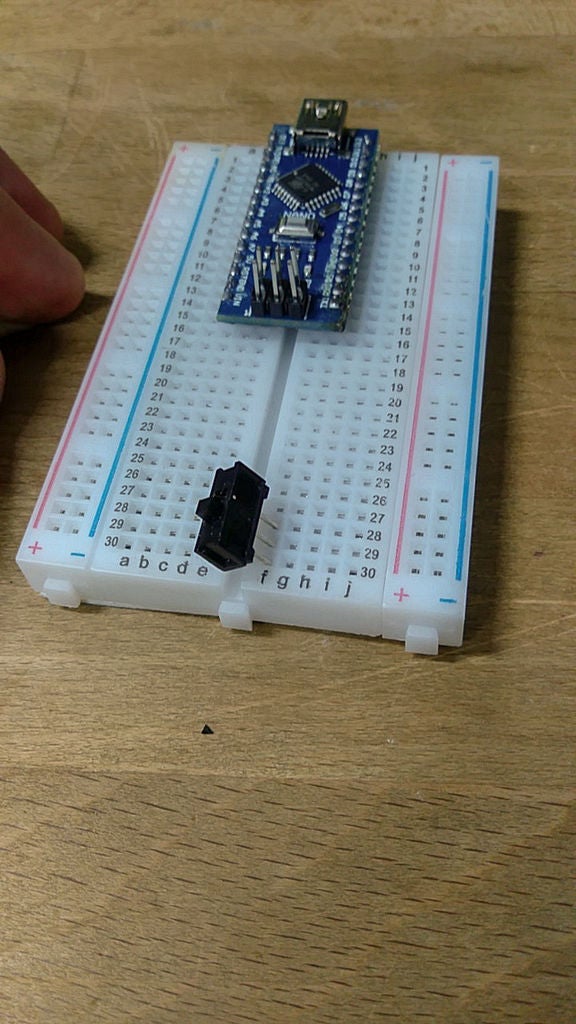
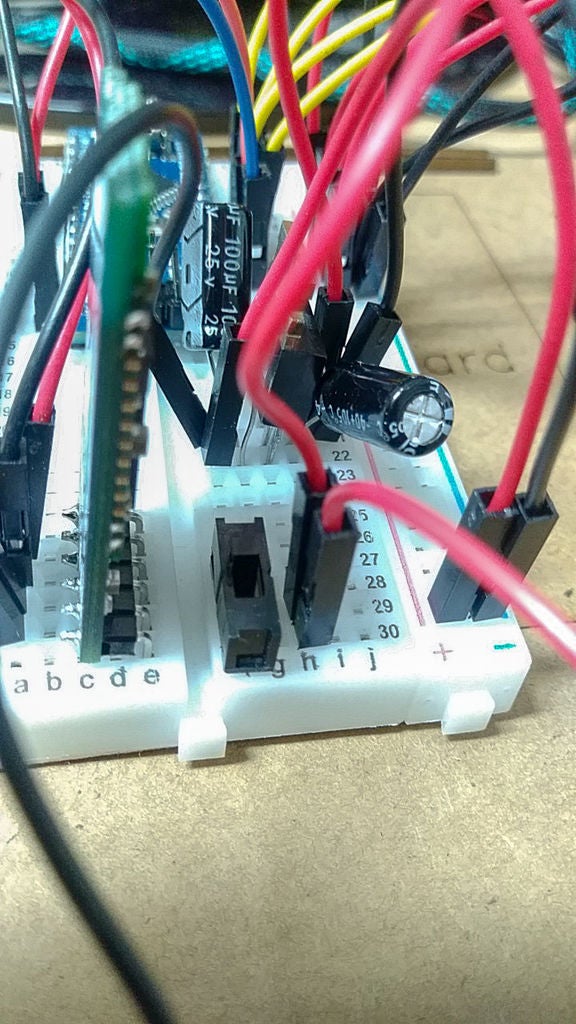
有關這些說明,請參閱面包板上的標簽。它們像網格一樣設置。列標記為A到J,數字從1到30.
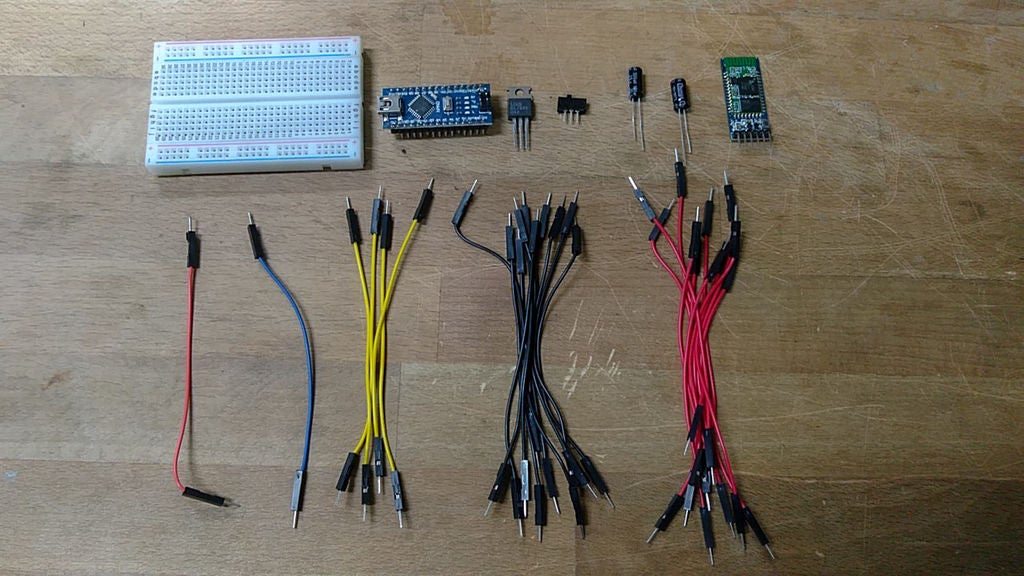
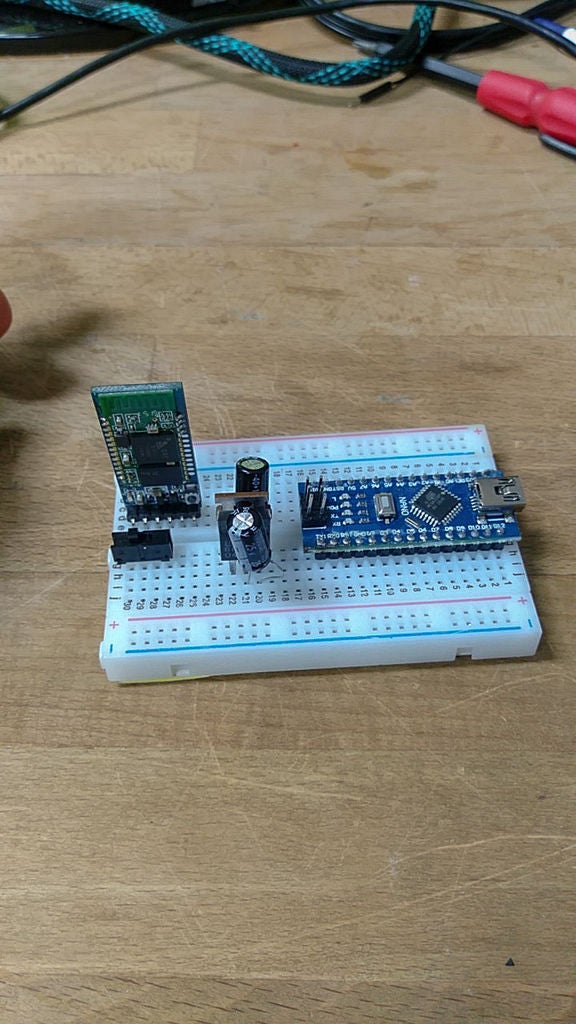
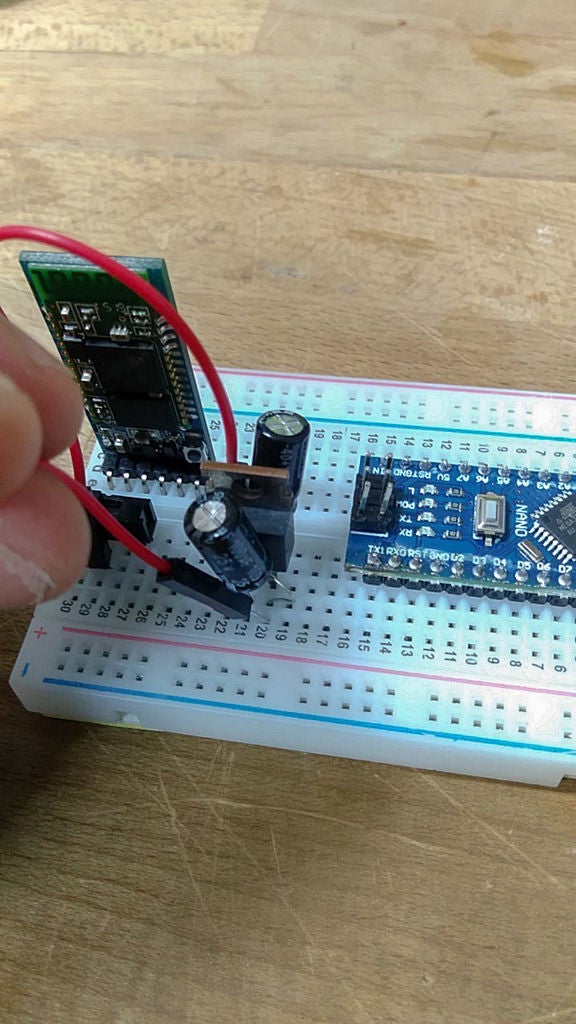
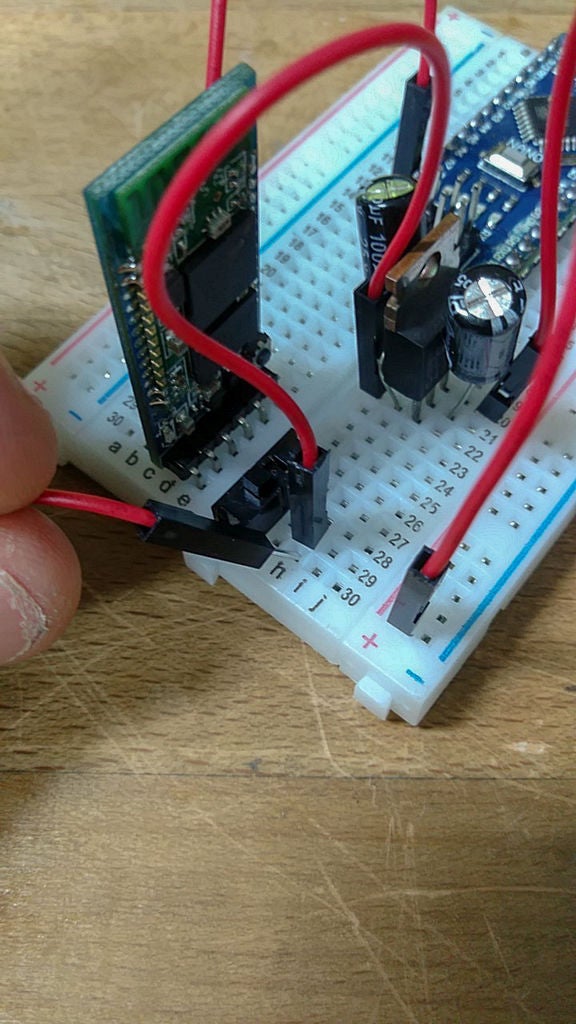
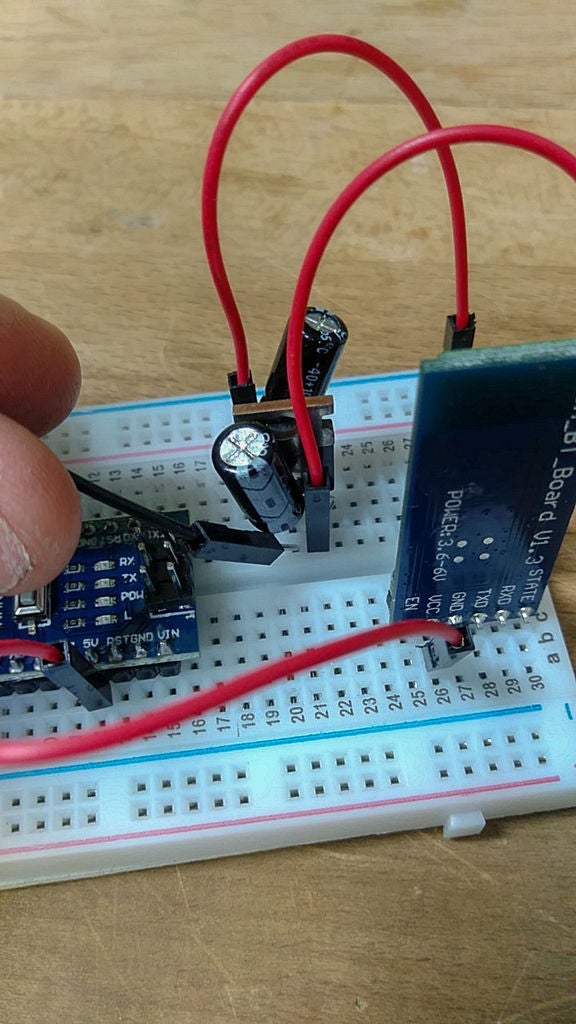
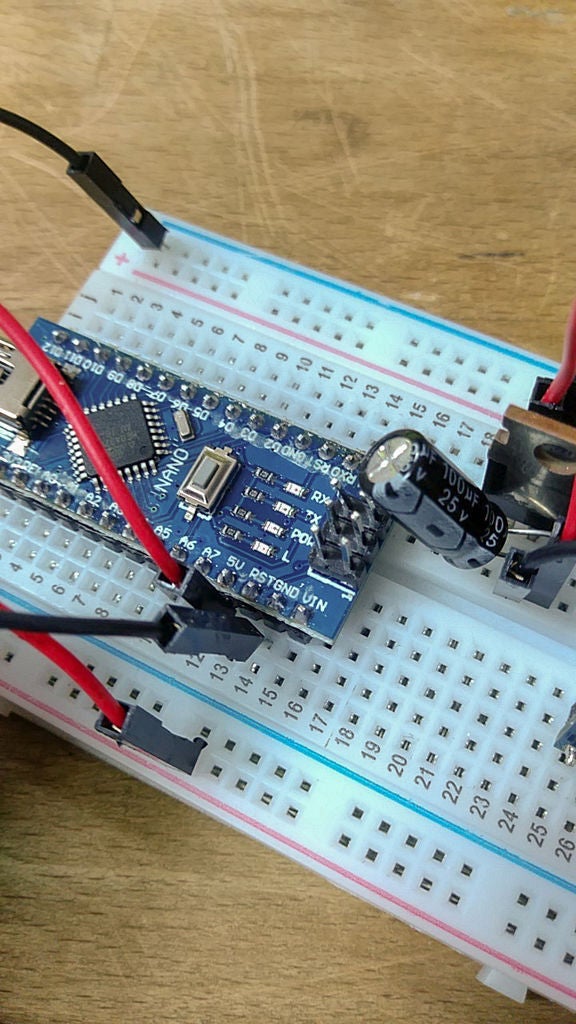
1。收集納米,電壓調節(jié)器,電容器,HC-05,跨接線,開關和面包板。
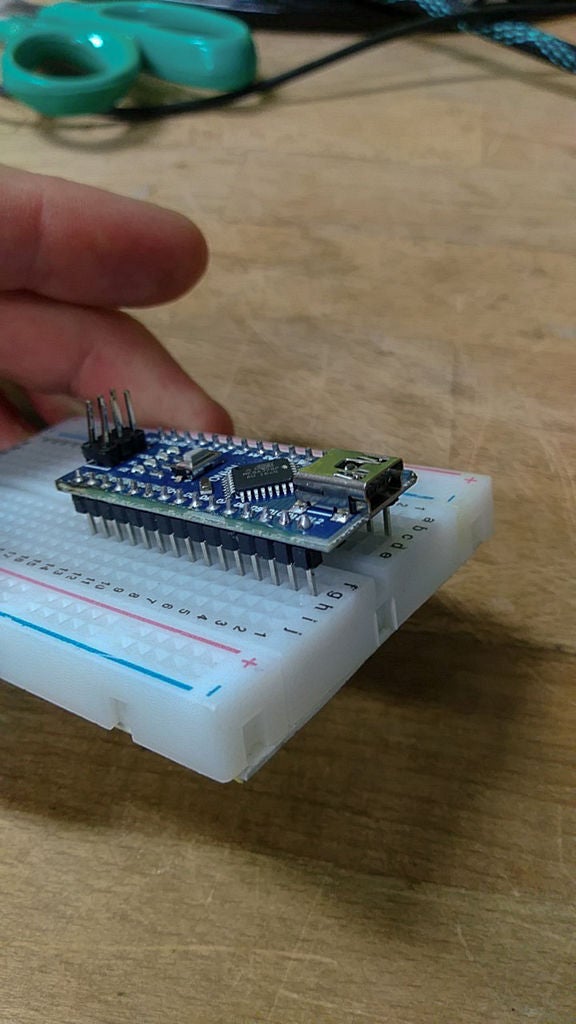
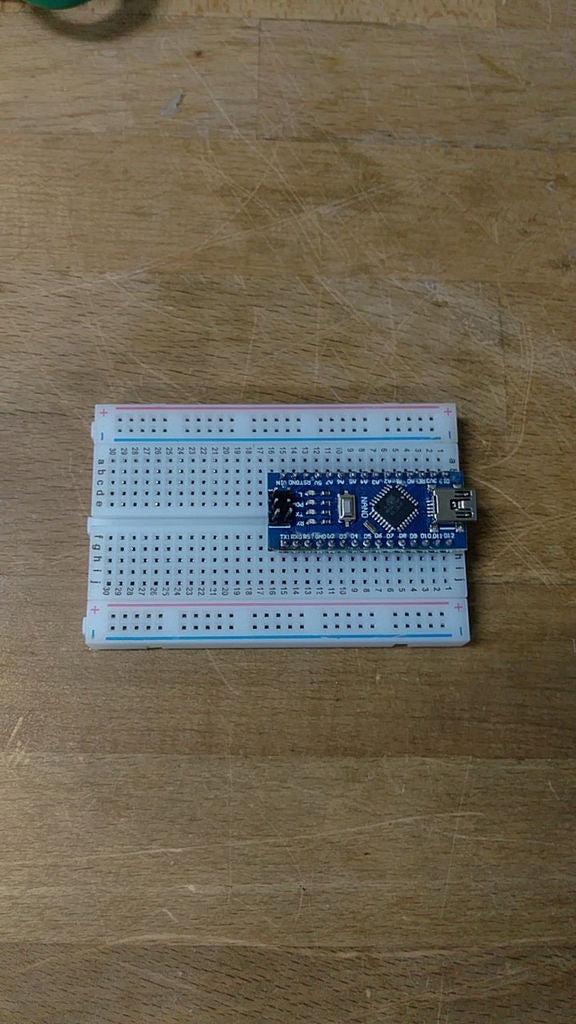
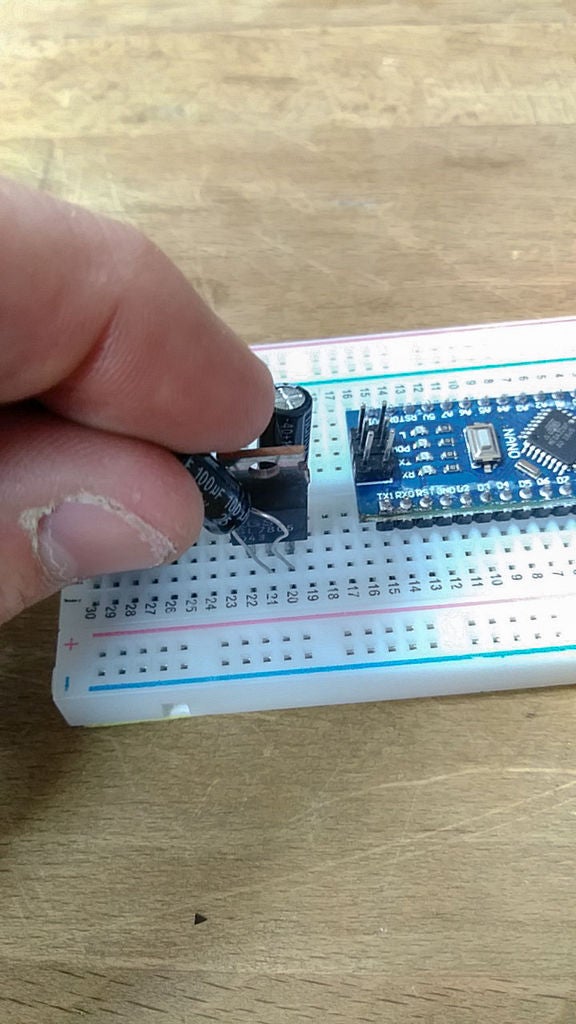
2。將Nano放在面包板上,使Nano的數字針腳12位于面包板上的G1位置。
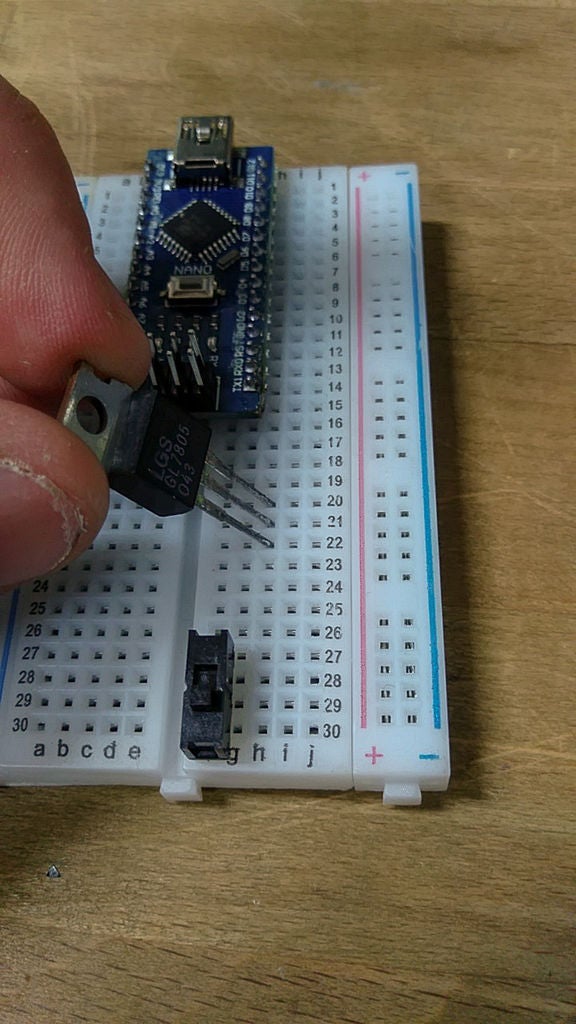
3。放置電壓調節(jié)器使其引腳位于H20,H21和H22位置。這部分非常重要,因此請記下電壓調節(jié)器的方向,因為一個引腳輸入而另一個引腳輸出。如果您在錯誤的方向上放置它,將無法工作!如果您定位面包板使Nano的USB端口背向您,則電壓調節(jié)器的標記面應朝向右側。查看圖片以供參考。對不起,大喊大叫。..。
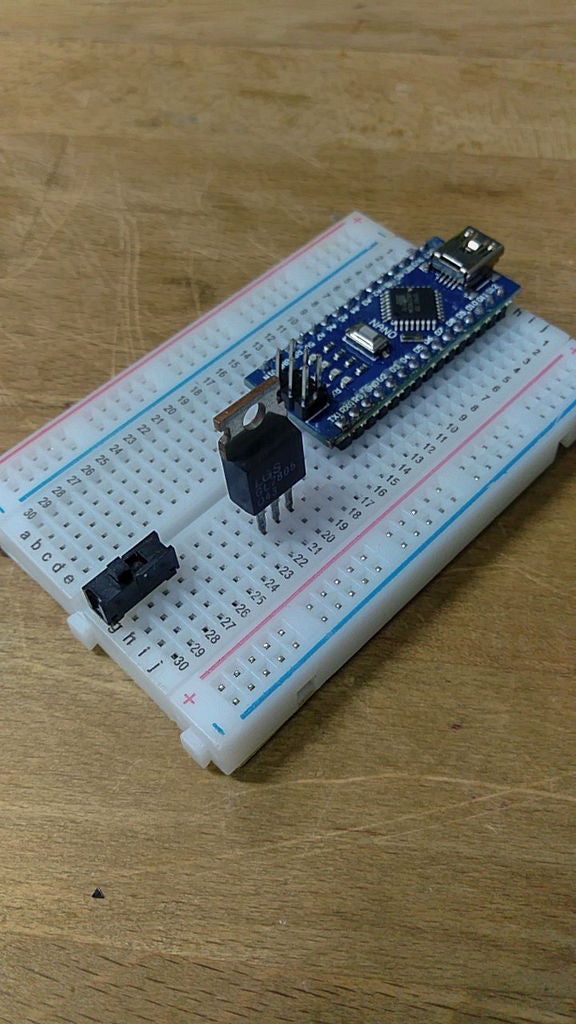
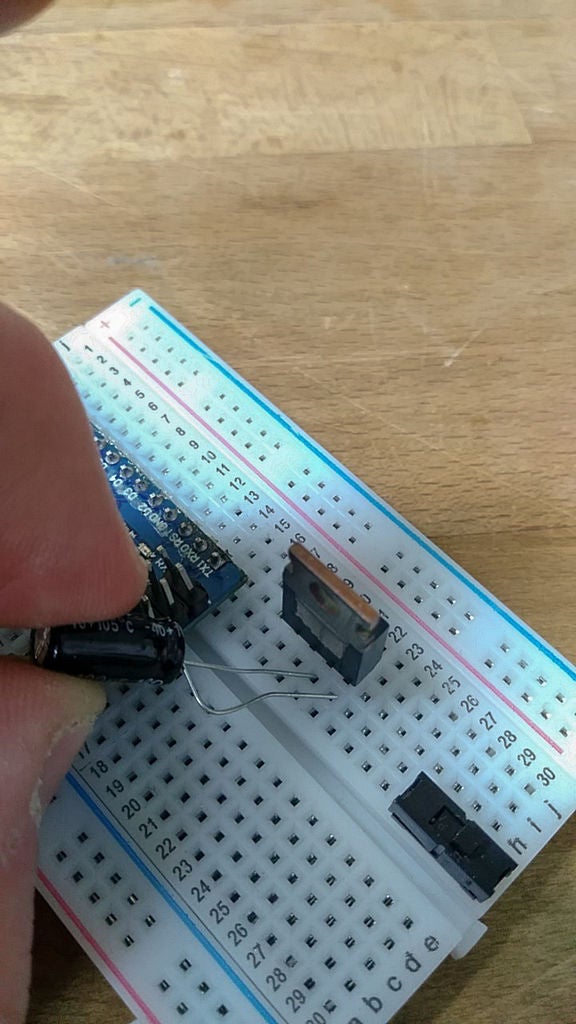
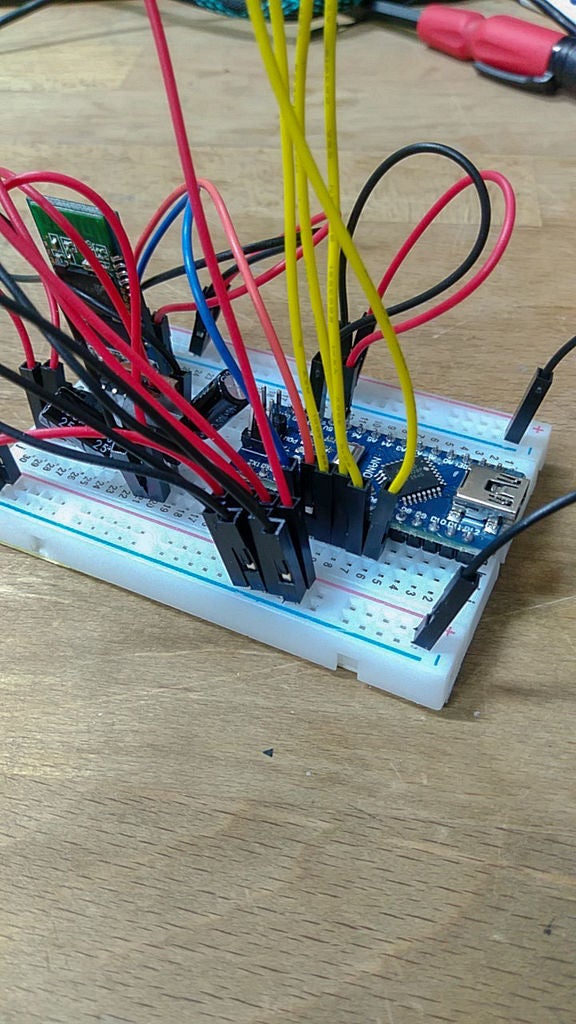
4。放置一個電容器,使負側位于F21位置,正側位于F22。在正面的引線上做一個小彎曲,以幫助它適應。
5。放置第二個電容,使其負側位于位置I21,正極位于I20。
在正極的引線上做一個小彎,以幫助它適合。
6。放置SPDT開關,使其三個引腳位于I30,I29和I28位置。
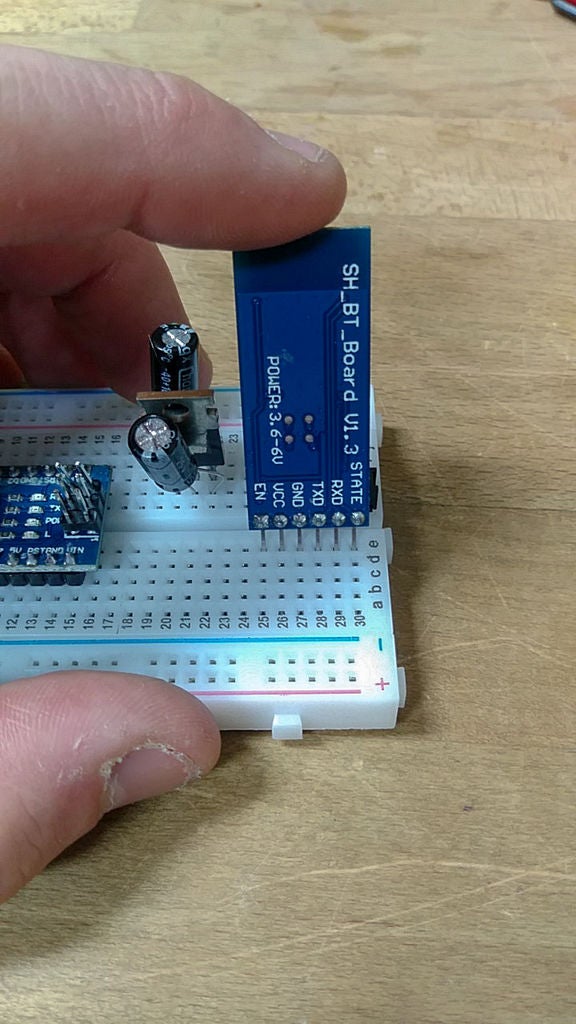
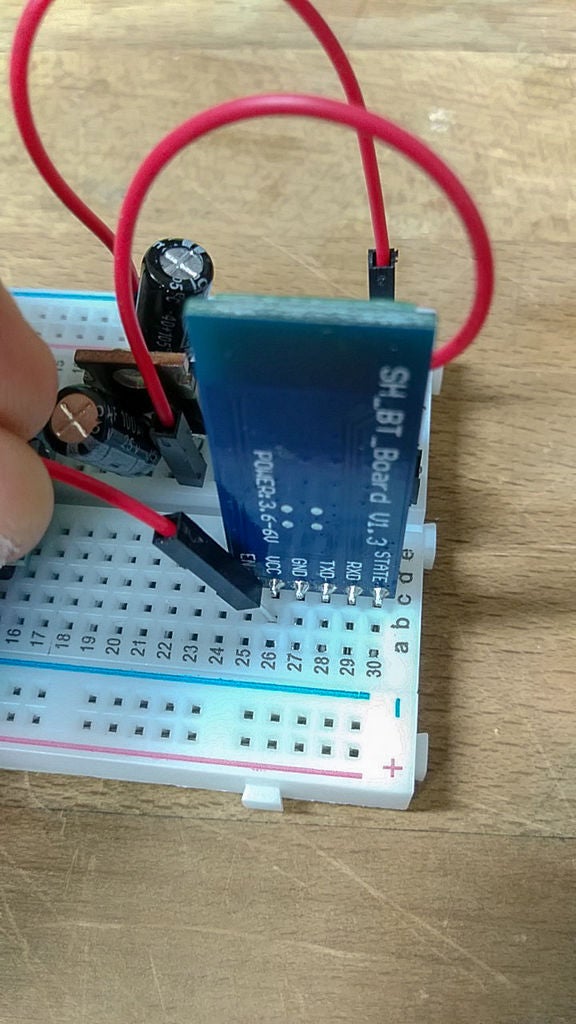
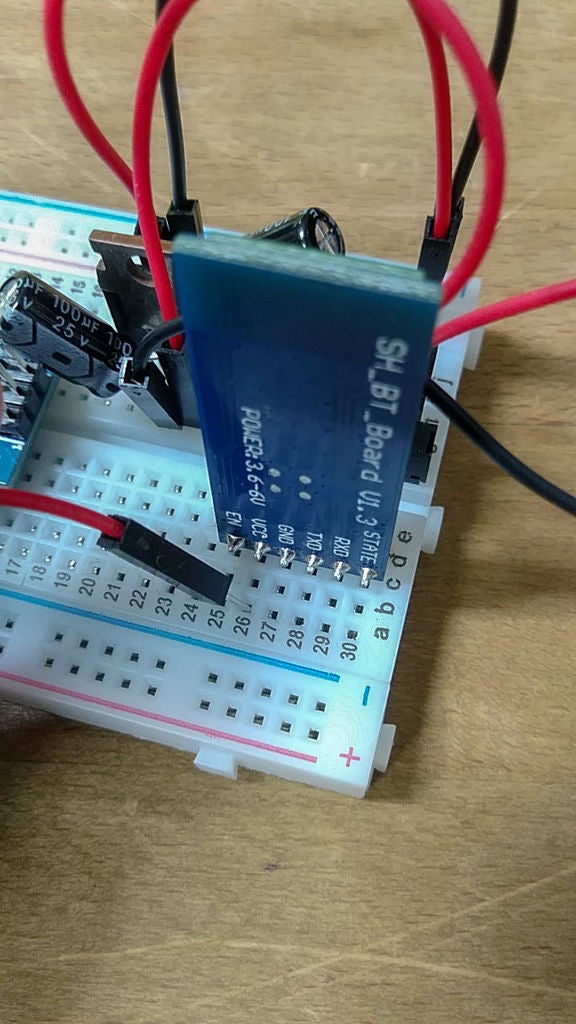
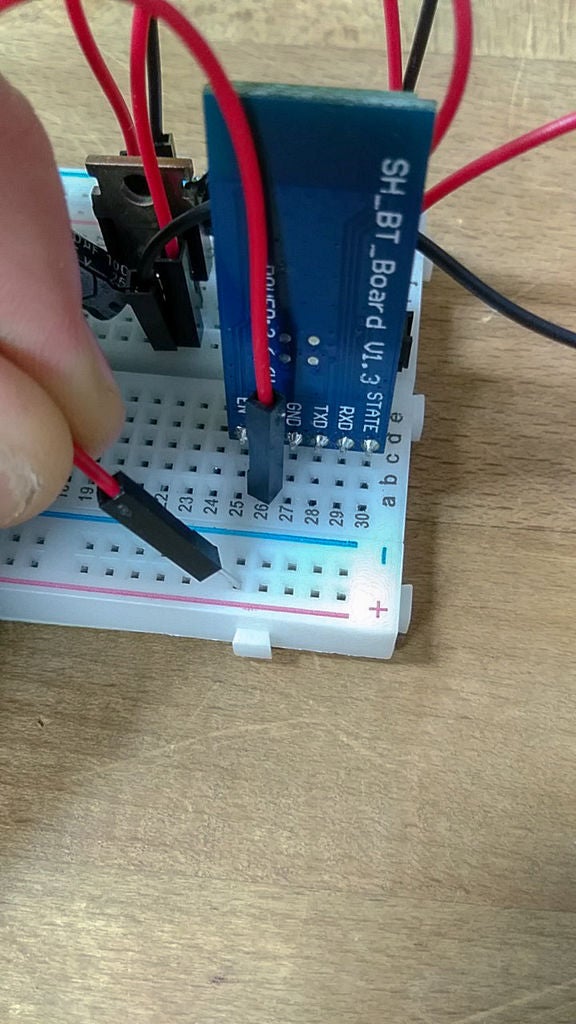
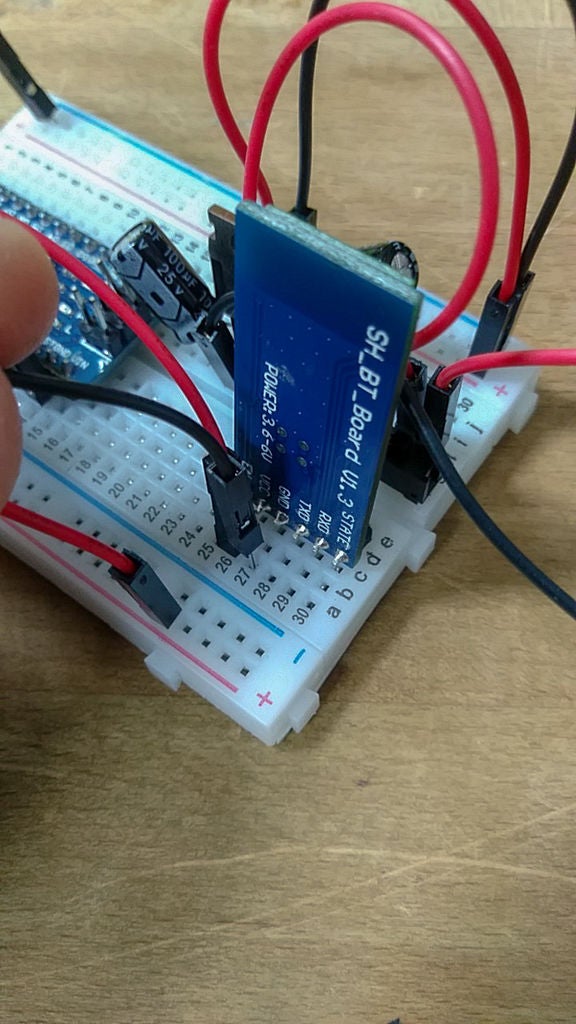
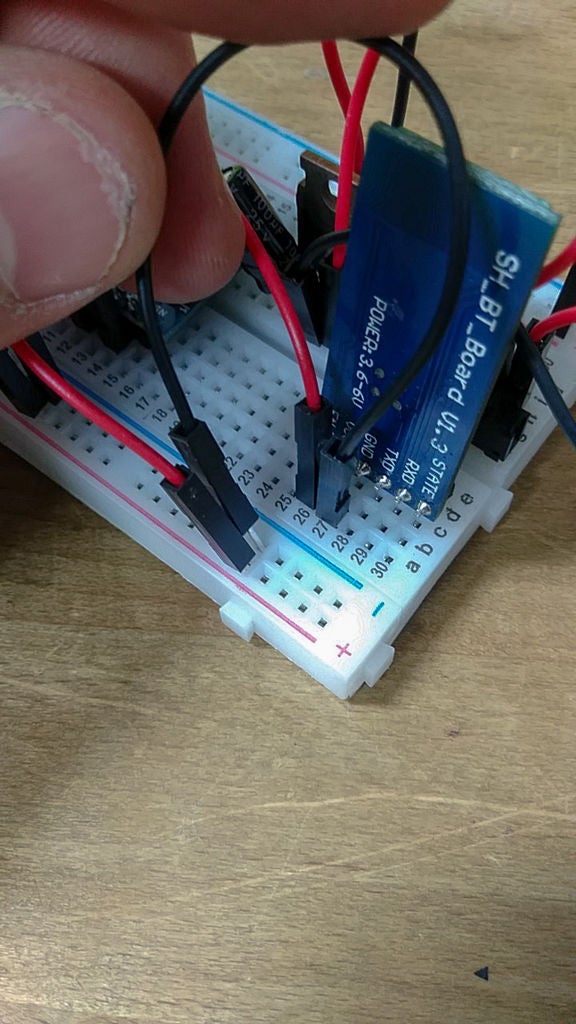
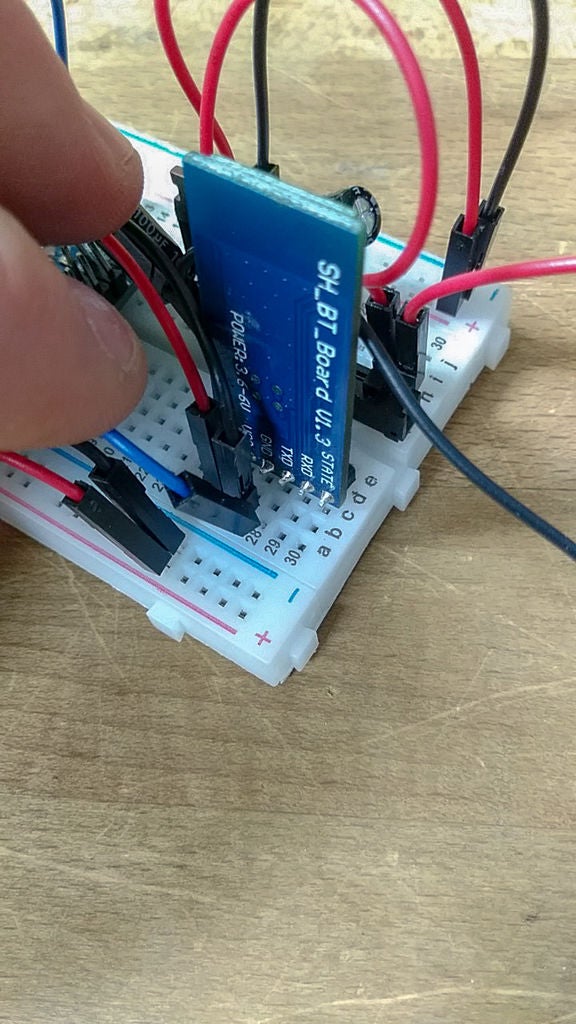
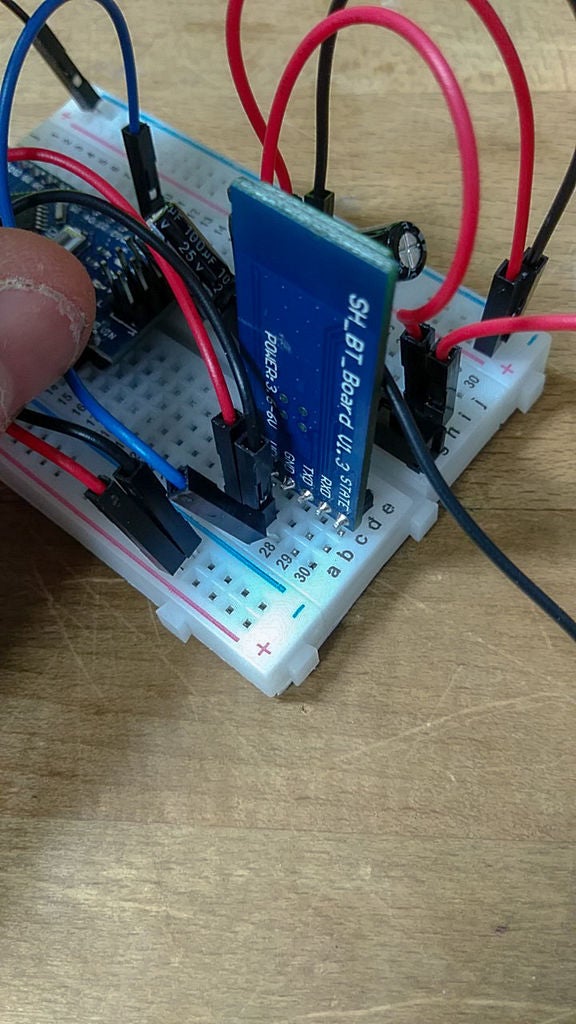
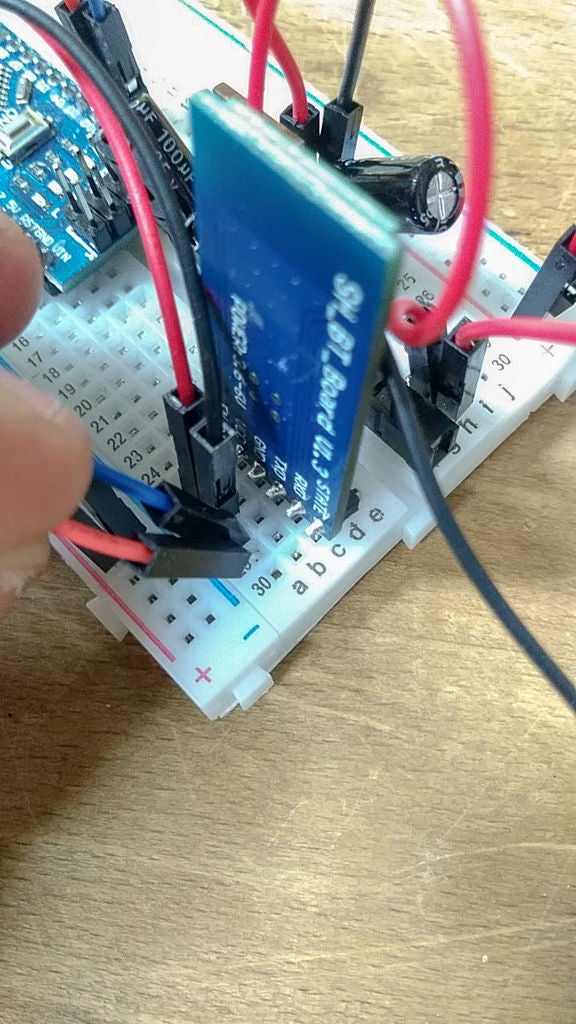
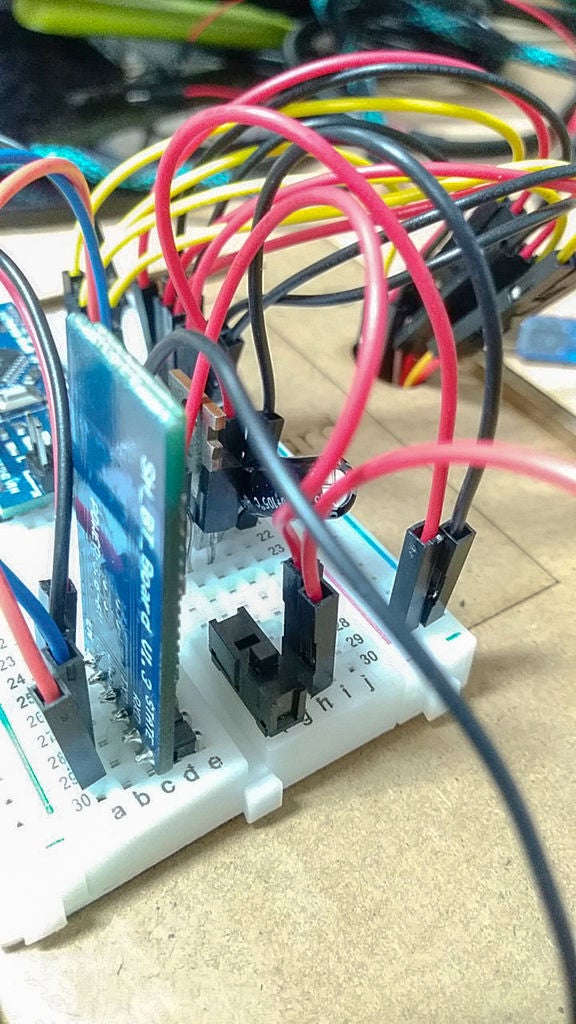
7。放置藍牙模塊,使其VCC引腳位于E26位置,GND位于E27,TXD位于E28,RXD位于E29。
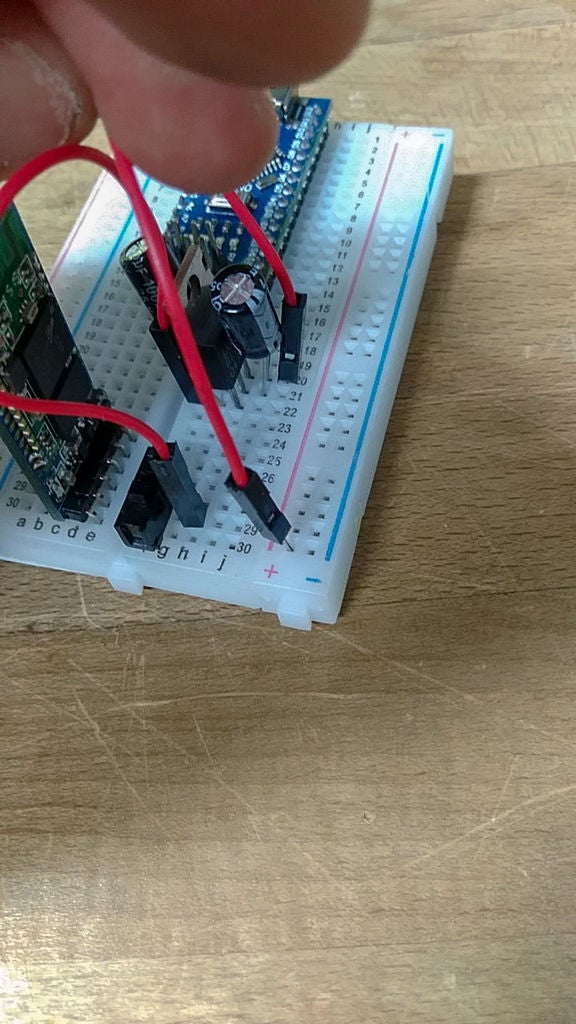
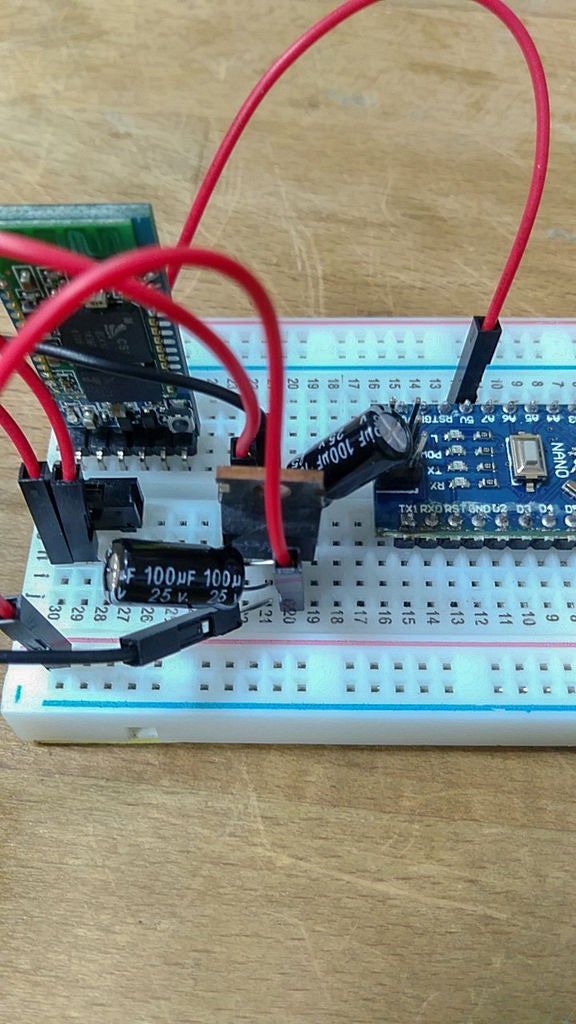
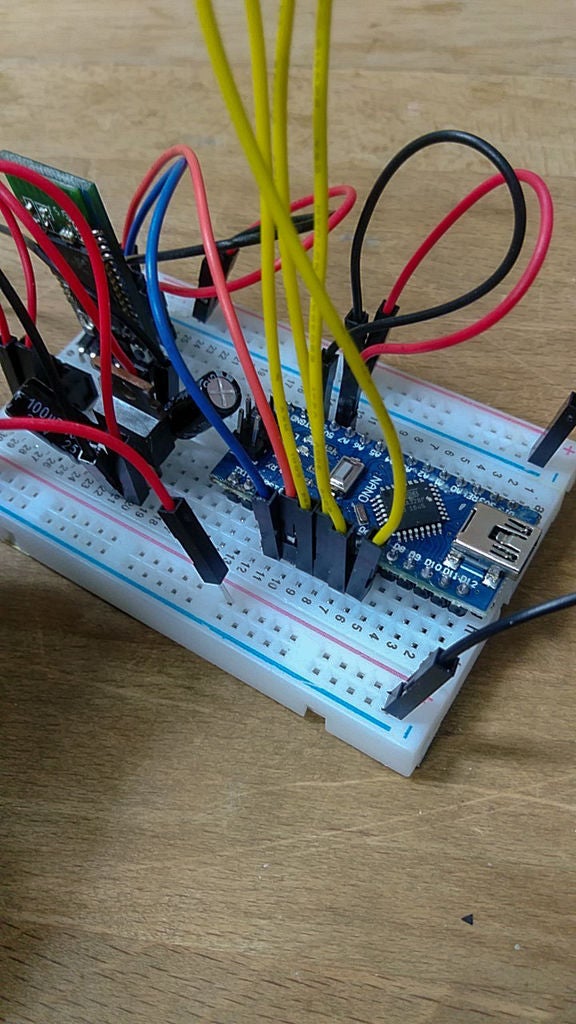
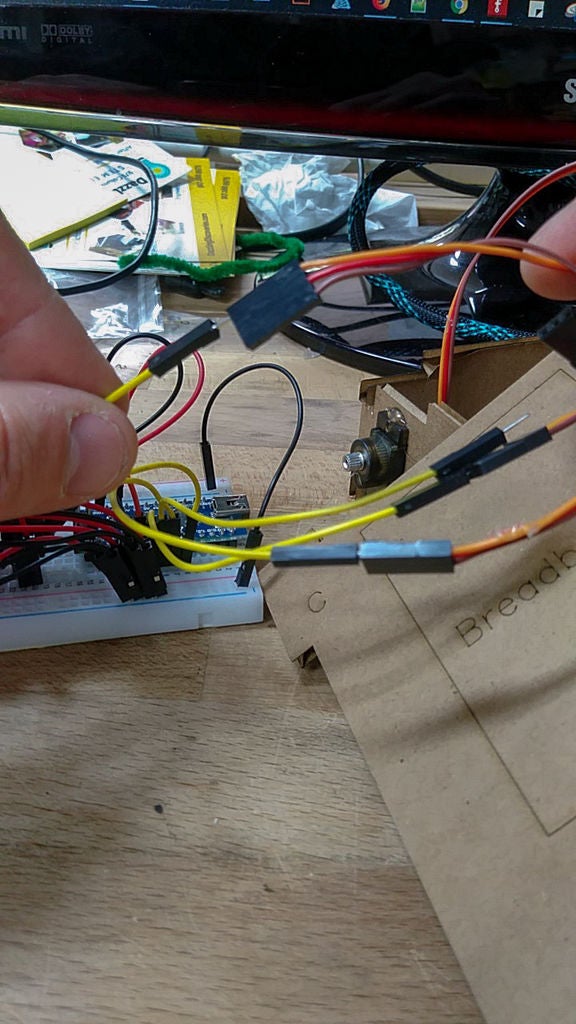
8。收集跳線將它們分成幾堆顏色,使事情變得更容易。
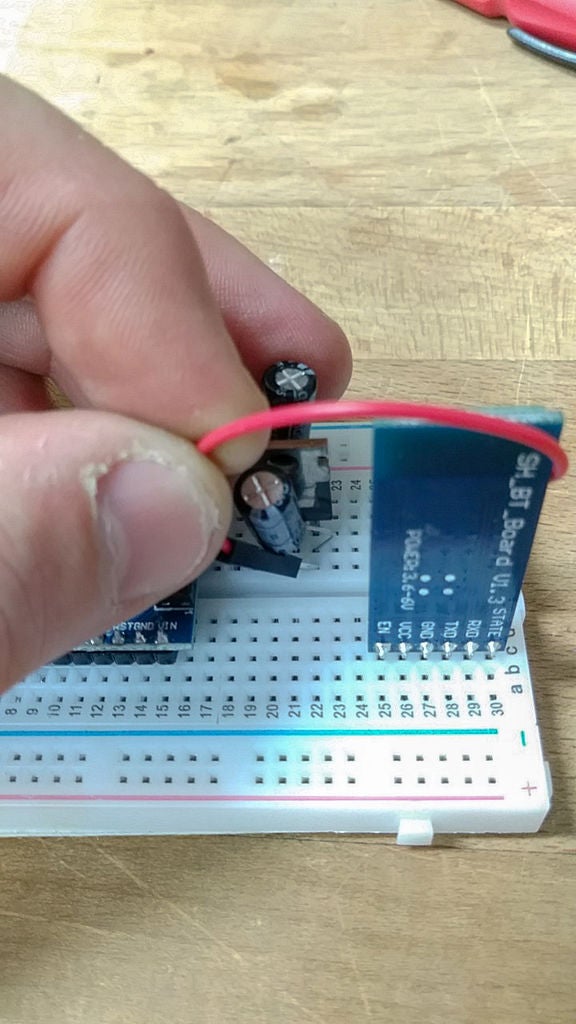
RED JUMPERS(電力線)
9。將第一個跳線的一端放在H30位置。留下這個跳線的另一端。
10。將第二個跳線的一端放入位置H29,另一端放入位置F22。
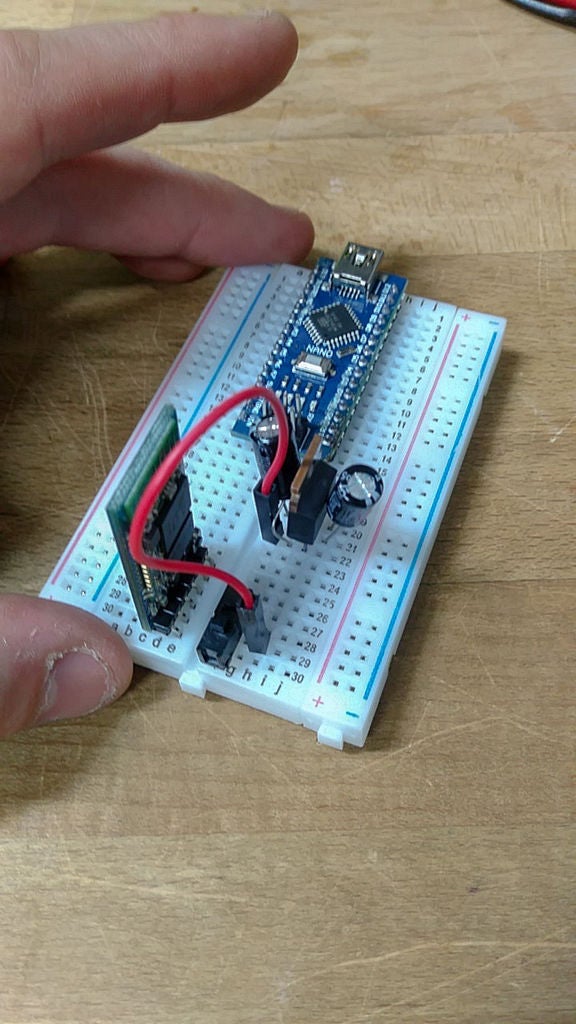
11。將第三個跳線的一端放入J20的位置,另一端放入面包板紅線的遠端。這是為電機創(chuàng)建一個5伏電源軌。
12。將第4,第5,第6和第7跨接線的一端放入面包板的電源導軌中,使它們組合在一起并靠近位置J12-J9。這將確保這些跳線靠近主體頂部的孔,伺服線將穿過該孔。將這些電線的另一端留下。這些將進入伺服電機的VCC引腳。
13。將第8個跳線放在B12位置。它應該與Arduino Nano的5Volt引腳位于同一行。將跳線的另一端放入面包板的紅色導軌中。這是為傳感器和設備(如我們的藍牙模塊)創(chuàng)建5伏電源。
14。將第9個跳線的一端放在面包板的A26位置,另一端放入面包板的電源導軌中。
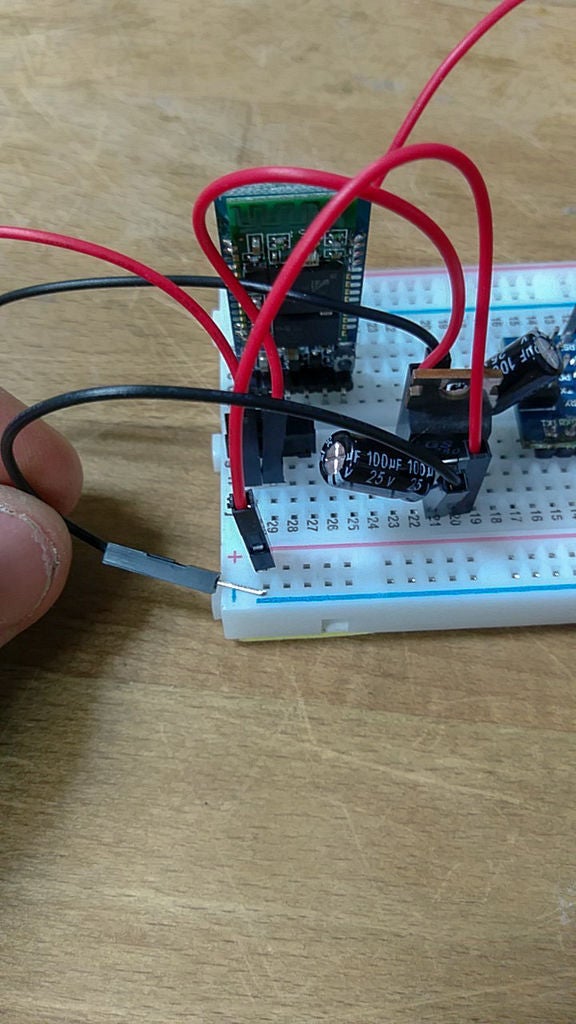
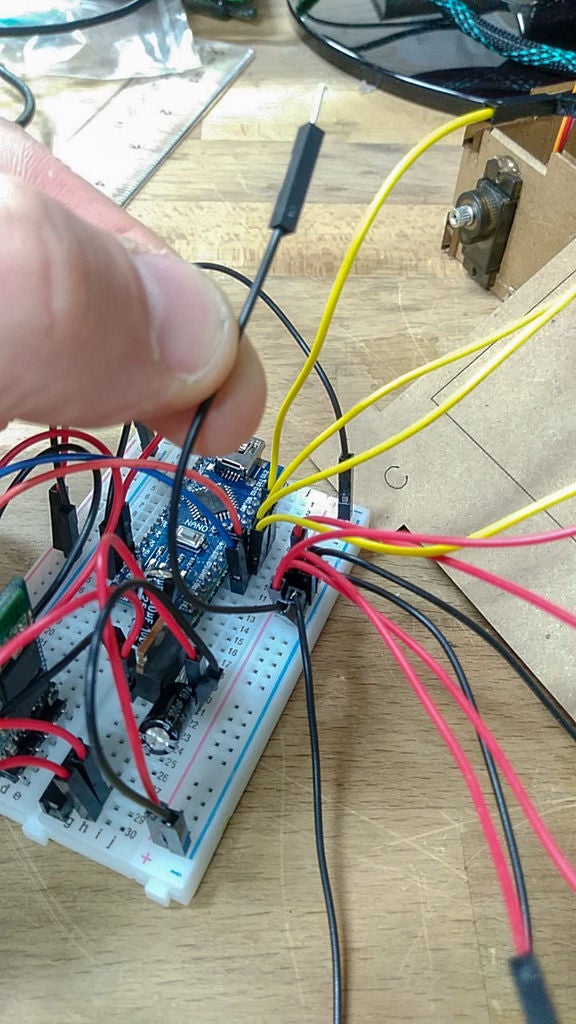
BLACK JUMPERS(地面線)
15。將第一個跳線的一端放入面包板的F22位置,讓另一端自由。
16。將第二個跳線的一端放入位置J21,另一端放入面包板的藍線,紅色跳線旁邊。這將為電機創(chuàng)造一個地軌。
17。將第3,第4,第5和第6跳線的一端放入面包板的藍線和紅色跳線旁邊。讓對方自由。這些將進入伺服電機的接地引腳。
18。將第7個跳線的一端放入面包板上藍色導軌的遠端,另一端放入面包板相對的藍色導軌的遠端。這將連接面包板的兩個藍色導軌。
19。將第8根跨接線的一端放入面包板的B14位置。這應該與Arduino Nano的GND引腳位于同一行。將跳線的另一端放入面包板的藍色導軌中。通過這樣做,您將所有接地連接到Arduino的接地引腳。這對機器人的正常操作至關重要。所有理由必須連接。
20。將第9根跨接線的一端放入位置A27,將另一端放入面包板的藍色導軌中。這是為了將藍牙模塊的GND引腳連接到面包板的接地導軌。
剩余顏色
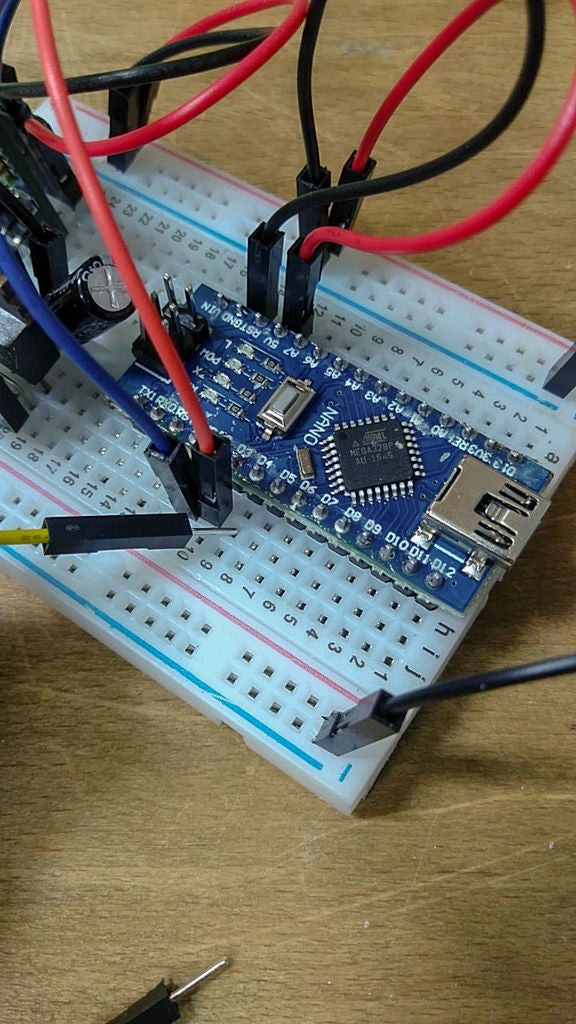
21。將每根黃色跨接線的一端放入面包板的位置I9,I8,I7和I6。讓對方自由。每根跨接線的自由端將連接到伺服電機的信號引腳。位置I9,I8,I7和I6應分別與Arduino Nano的數字引腳4,5,6和7位于同一行。如果不是,只需確保每個黃色跳線的一端與Nano的數字引腳4,5,6和7位于同一行。
22。將藍色跳線的一端放入位置I11,將另一端放入位置A28。這是為了將Nano的數字引腳2連接到藍牙模塊的TXD引腳。
23。將橙色跳線的一端放入位置I10,將另一端放入位置A29。這是為了將Nano的數字引腳3連接到藍牙模塊的RXD引腳。
用接線圖仔細檢查連接,然后轉到下一步!
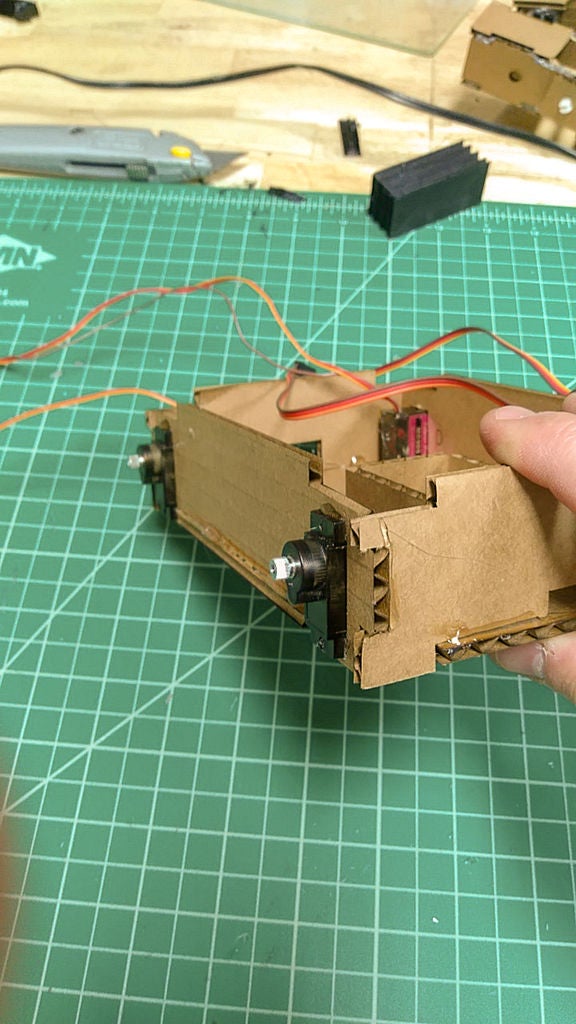
步驟5:將身體部位放在一起
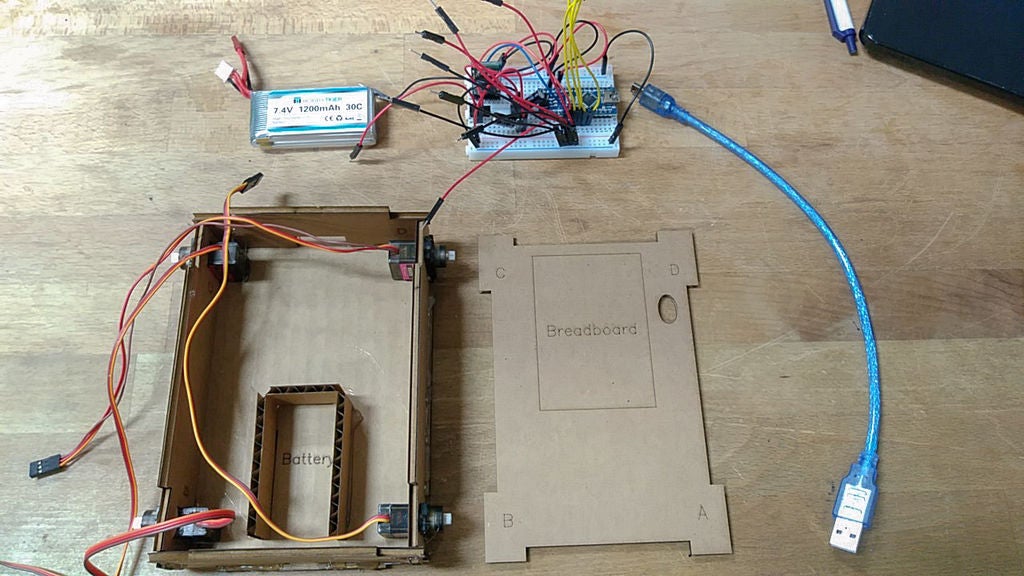
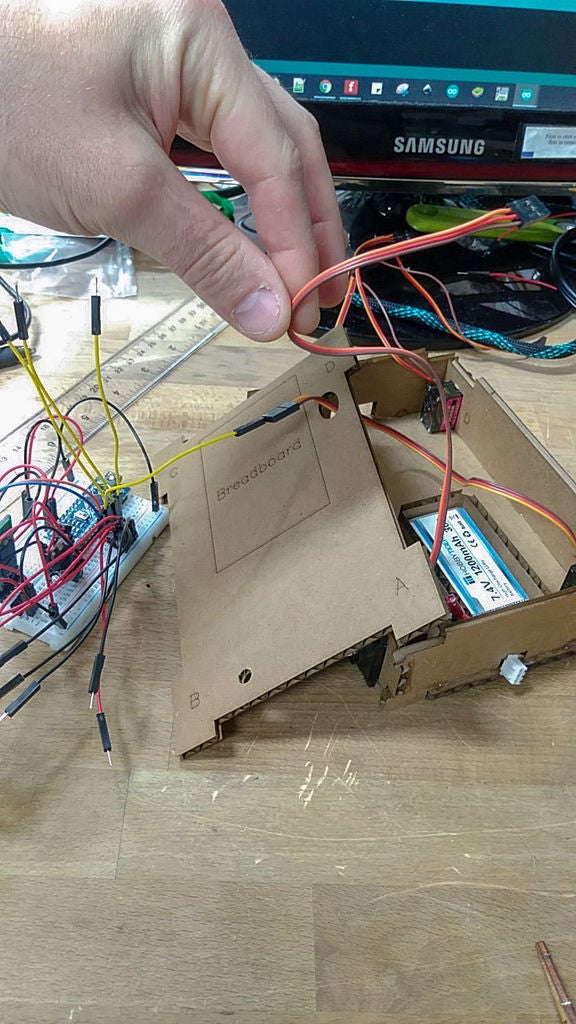
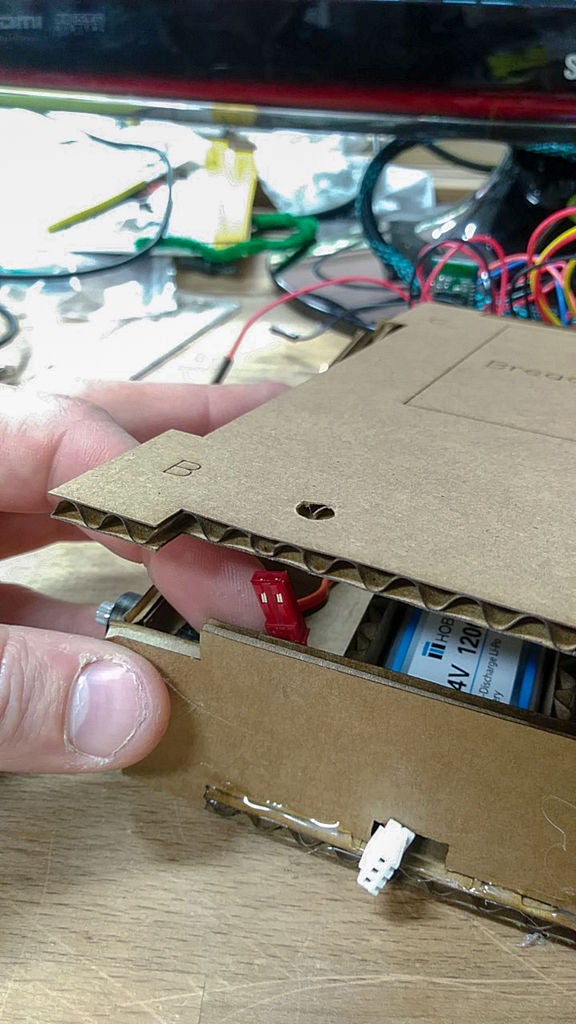
我們差不多完成了。現在我們要將伺服電池和電池連接到我們的面包板上。
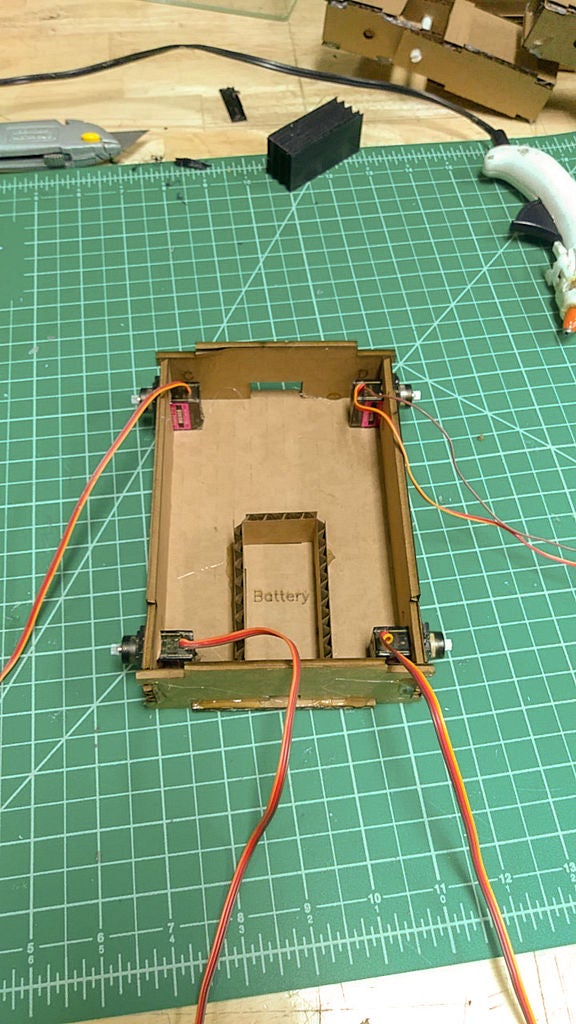
收集有線面包板,附有舵機的機身和機身頂部。車身頂部標有A,B,C,D和面包板。
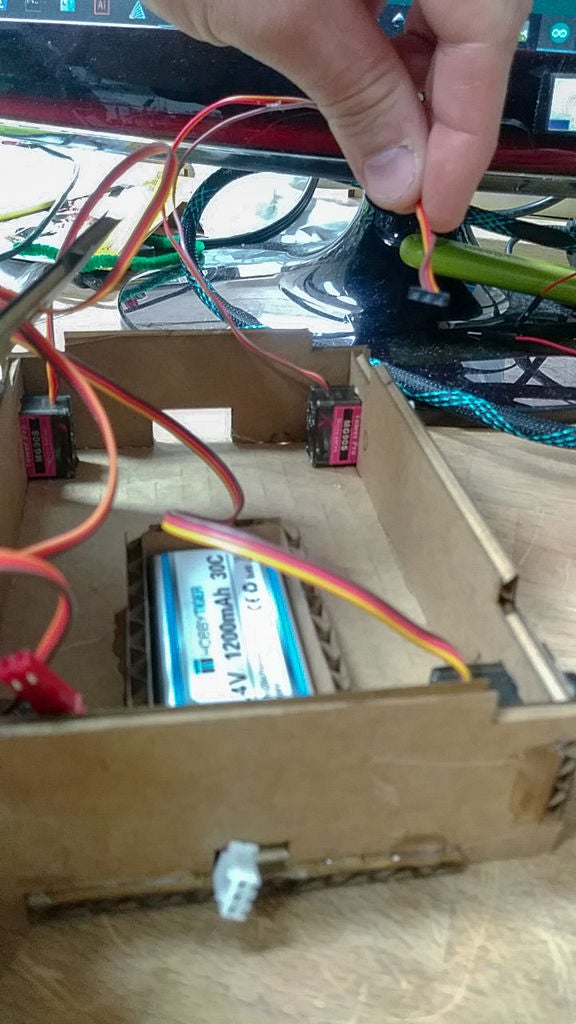
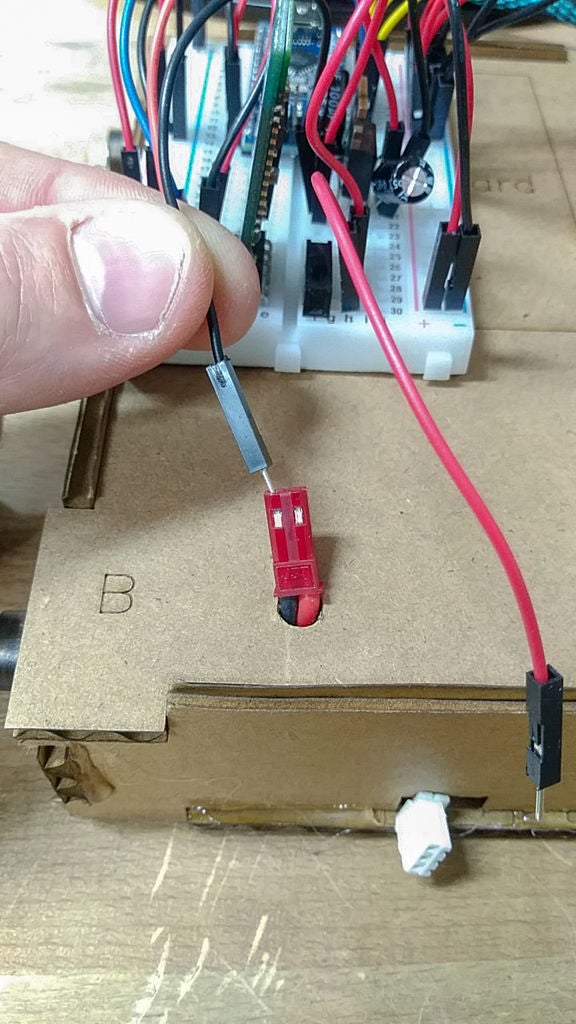
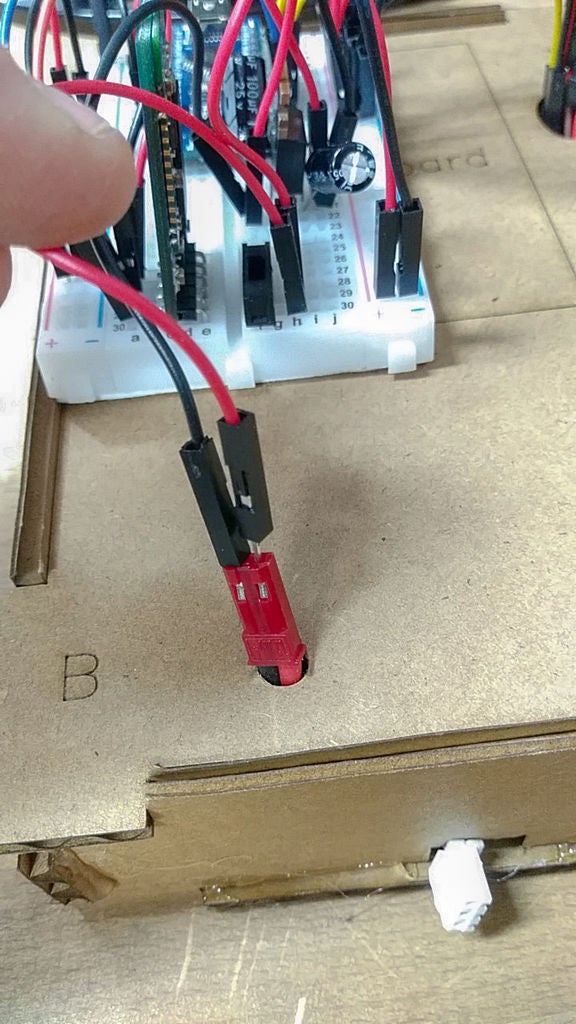
連接電機電池
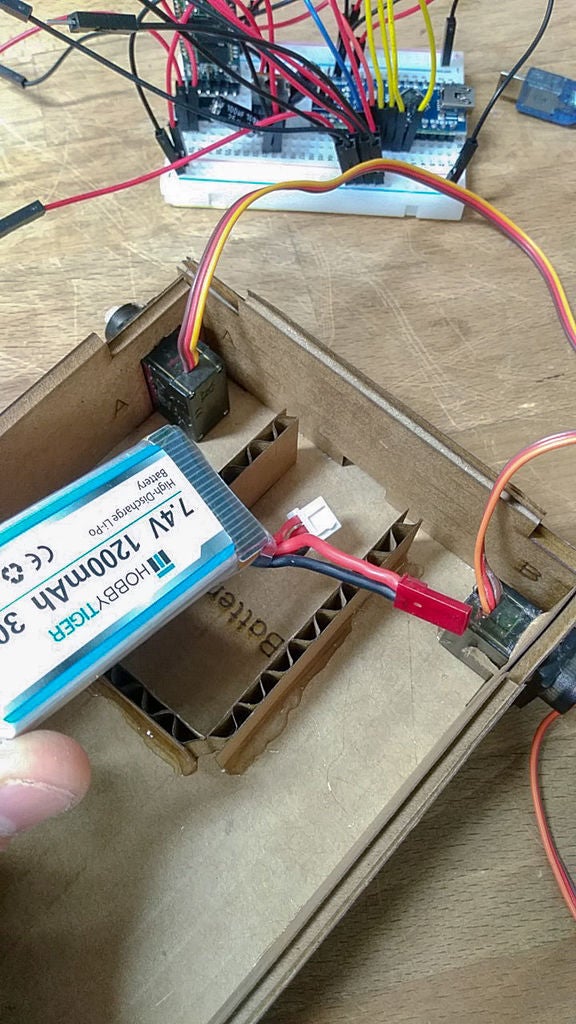
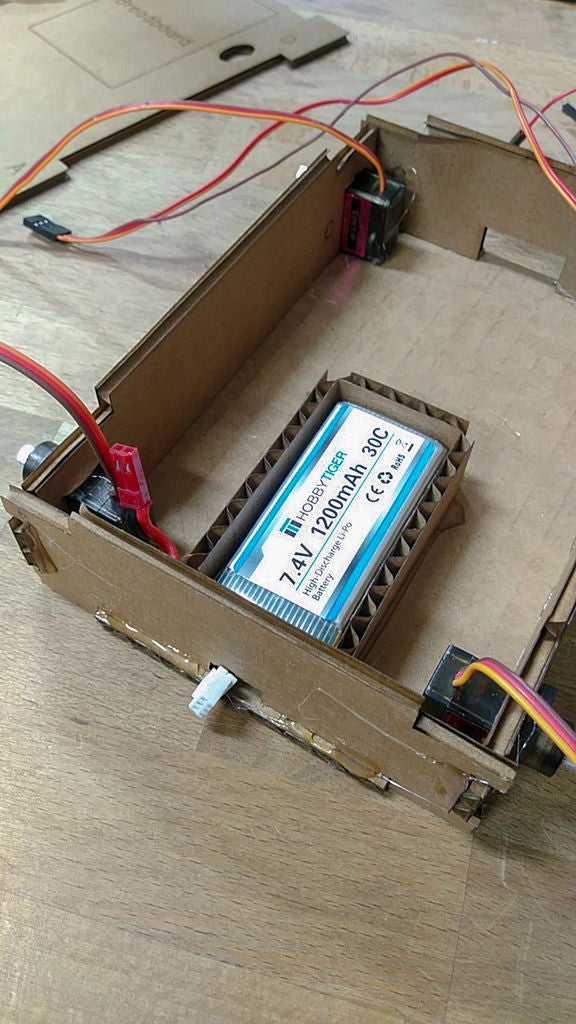
1。將電池組放入機身的電池座中。
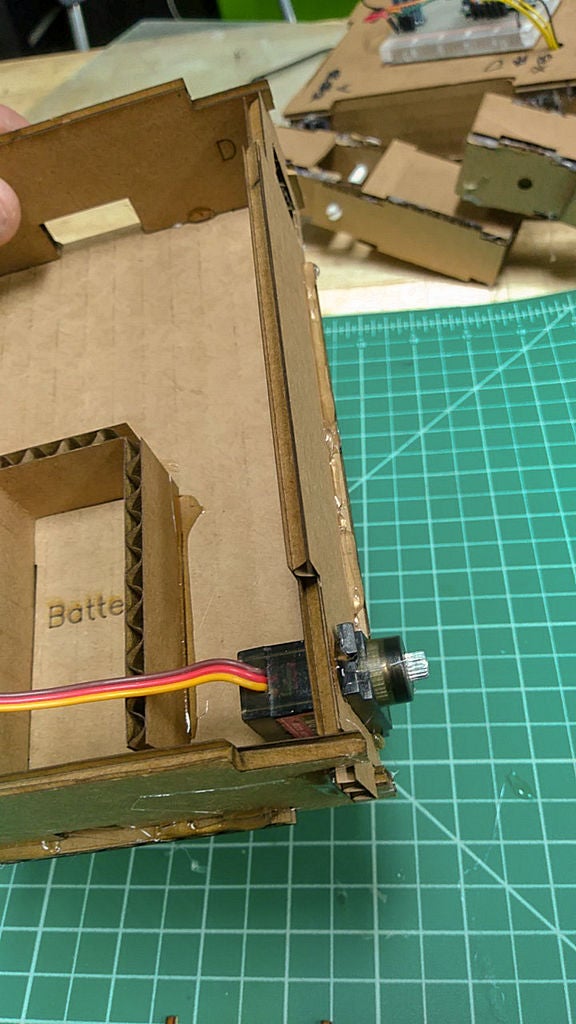
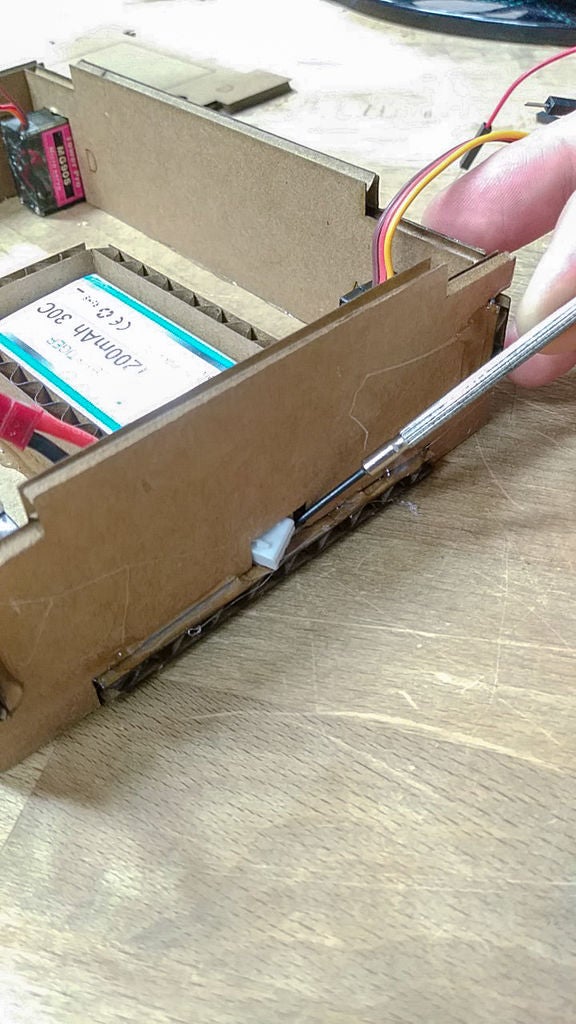
2。應該有兩組來自電池的電線。將帶有白色蓋子的三根電線穿過車身側壁的小孔。這是為了將電池連接到充電站而無需從機器人中取出電池。
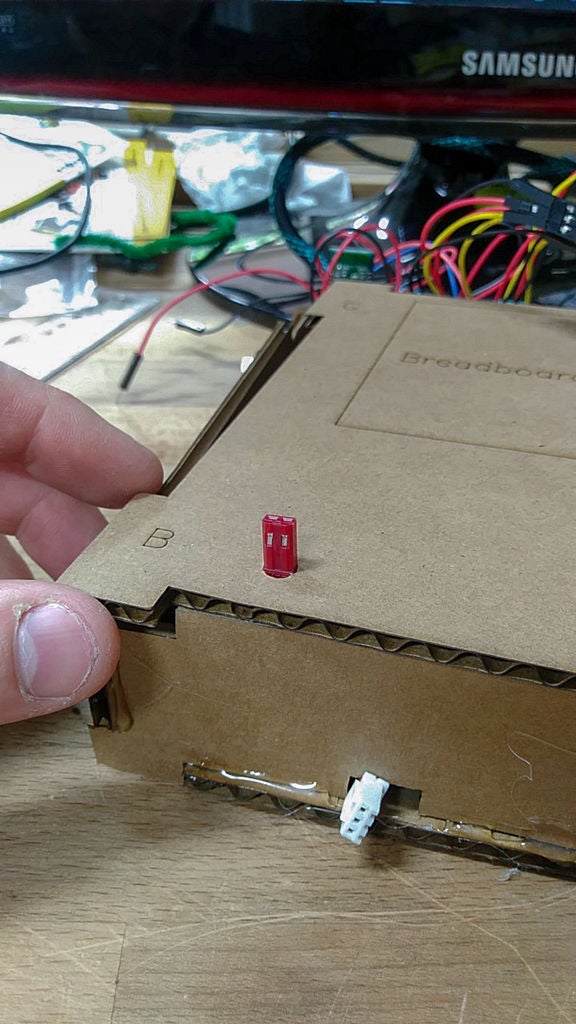
3。將帶有紅色帽的兩根電線穿過車身頂部的小孔。
4。確保面包板上的開關設置為OFF。我意識到交換機沒有ON或OFF標簽。但是,如果您按照說明連接了所有內容,則OFF位置是切換到Arduino時的按鈕。
5。將黑色跨接線的自由端連接到電池的GND引腳。
6。將紅色跨接線的自由端連接到電池的Vout引腳。
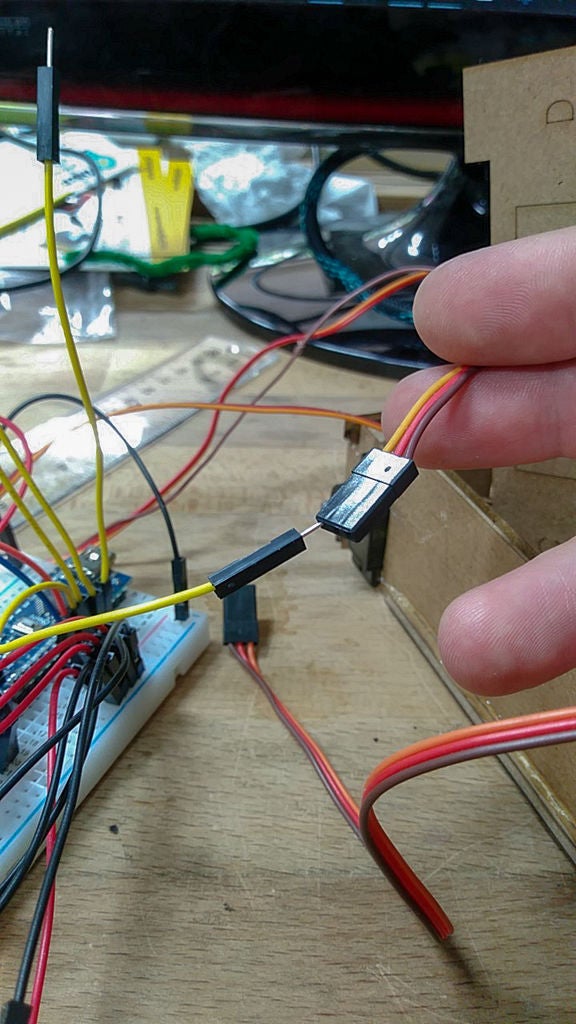
連接伺服器
7。我們將逐個連接伺服器以確保它們正確連接。這是關鍵步驟之一。但是,不要擔心。如果以錯誤的順序連接伺服電機,您可以隨時拆下并重新連接跳線以便寫入。
8。將伺服A的導線穿過車身頂部的孔。
9。將位置I9的黃色跨接線的自由端連接到伺服A電機的信號引腳。信號引腳應為伺服的橙色線。如果它的顏色不同,它應該位于伺服接地線的另一側。在任何情況下,請參閱伺服電機的規(guī)格以確保正確接線。
10。將面包板最近位置J12的紅色跳線的自由端連接到伺服A的VCC引腳。
11。將剛剛連接的紅色跳線旁邊的黑色跳線的自由端連接到伺服A的GND引腳。
12。對于伺服器B,C和D,重復步驟2到5.對于黃色跳線,你想連接它們,因此數字引腳4進入A,5進入B,6進入C,7進入D.這很重要代碼假定這種連接安排。對于紅色和黑色跳線,只要紅色跳線連接到伺服器的VCC引腳并且黑色跳線連接到伺服器的GND引腳,順序就無關緊要了。
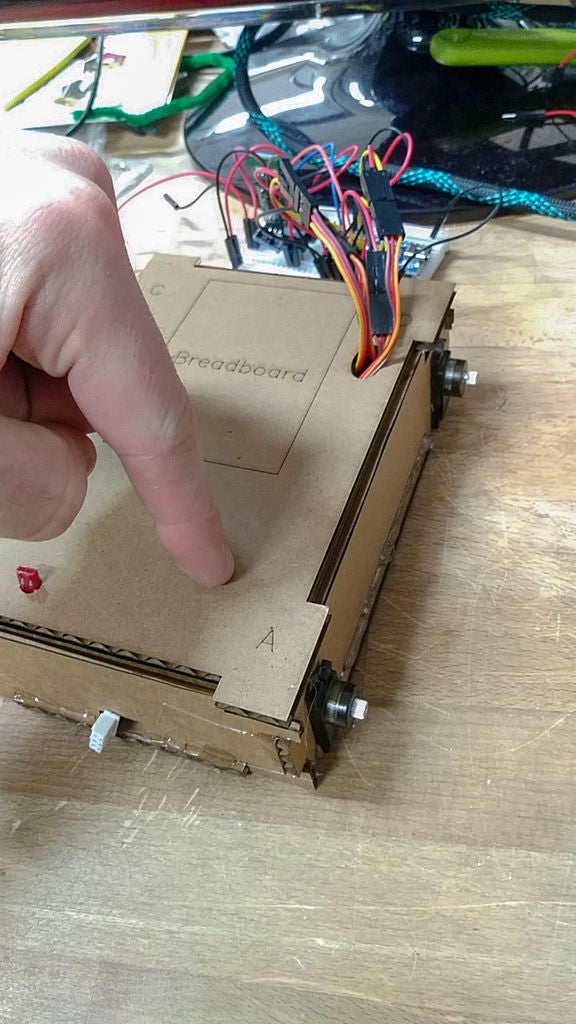
13。完成所有連接后,將主體頂部放在主體上,使其標簽與主體的凹痕對齊。
14。輕輕按下車身頂部,使其卡入到位。身體的標簽將適合身體頂部的凹痕。這應該在一起。您可以隨時添加一些膠水來固定頂部,但我喜歡不用膠水,以防我需要更換電池或電機。
第6步:上傳和測試代碼
現在我們可以上傳我們的代碼了。下載提供的代碼。您需要安裝Arduino軟件。這是一個簡單的過程。請參閱他們的網站獲取相關說明。
https://www.arduino.cc/en/Main/Software
1。將Arduino Nano連接到計算機上的免費USB端口。
2。打開Arduino IDE中的代碼。
3。從菜單中選擇電路板并選擇端口。
4。上傳代碼。
5。將開關轉到ON位置。電機應移動到90度。
暫停查看代碼。您將在void setup()中看到,在設置完所有引腳后,第一個動作是讓機器人調用stand()函數。這將腿移動到位,因此機器人站立。在提供的代碼中,這將腿移動到90度。現在,這很好。這將允許我們連接腿,使每條腿以90度為中心。我們需要這個作為參考點,需要一個合適的參考點以確保腿部正確移動。
如果向下滾動到代碼底部,您將看到stand()函數的詳細信息。它非常簡單。它將每個伺服的位置設置為90然后將每個伺服寫入90.您還會注意到一些被注釋掉的行。這些是我發(fā)現對機器人來說更好的位置。使用您的自由裁量權來查找最適合您的機器人的值。
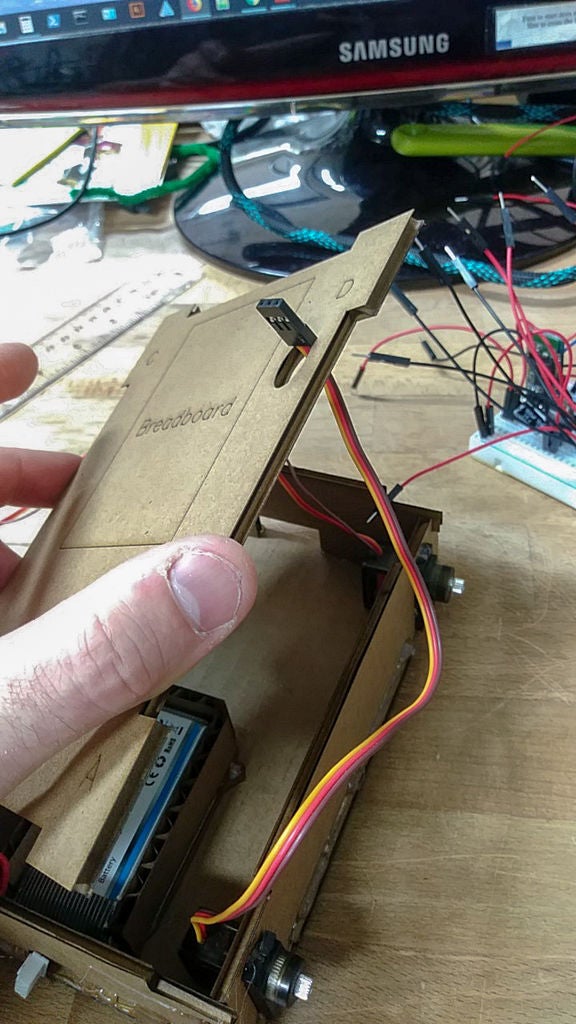
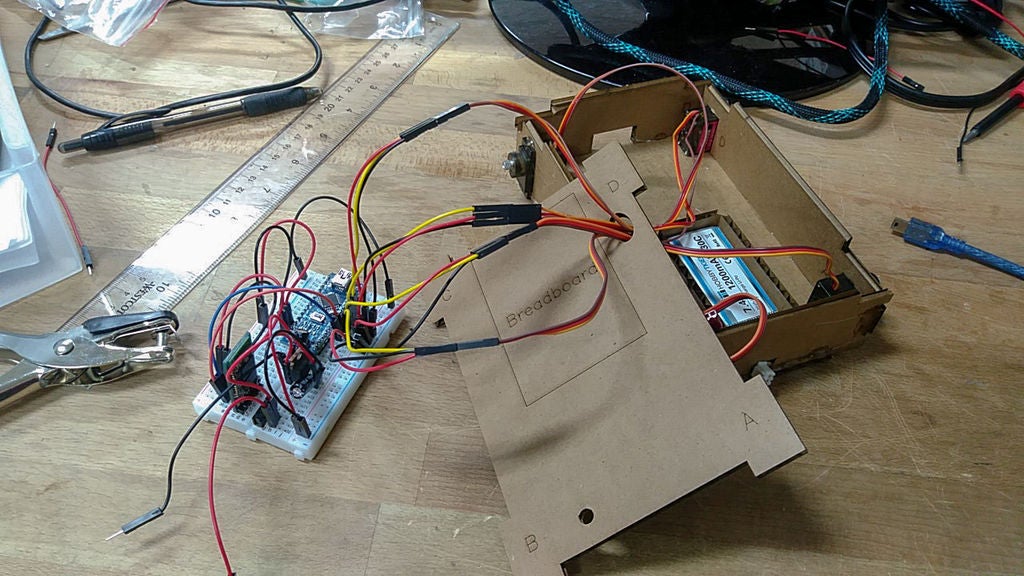
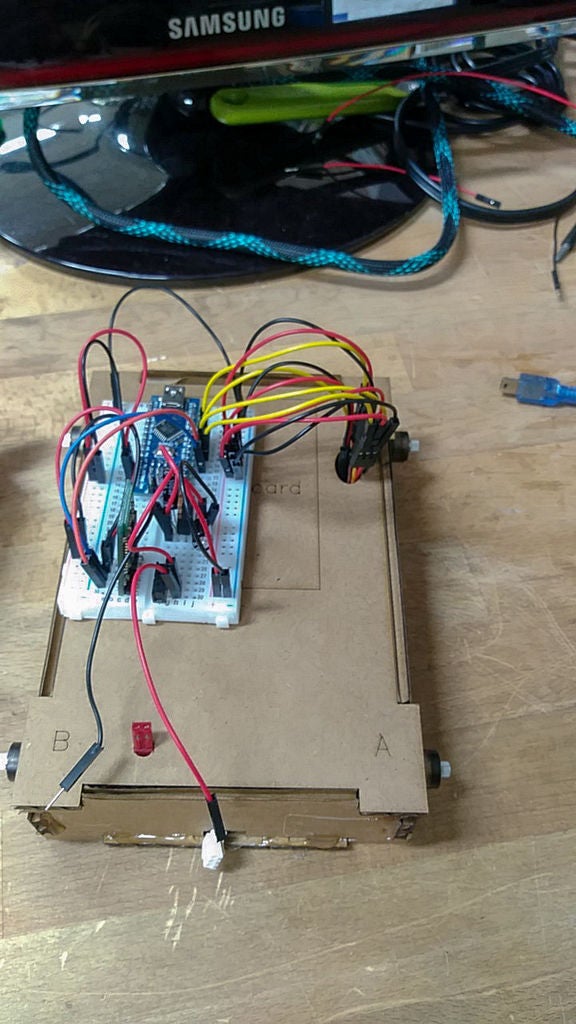
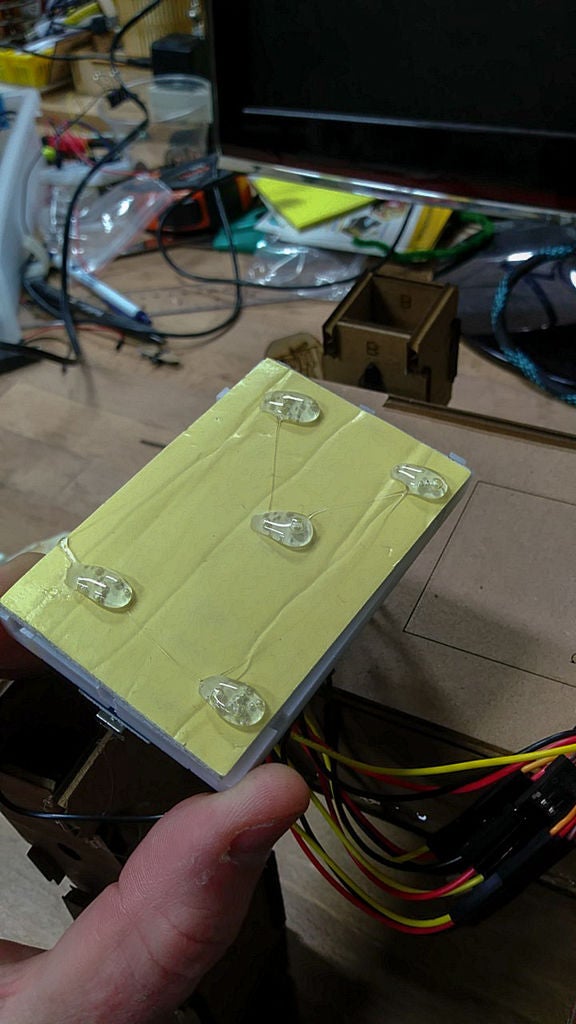
一旦代碼上傳并且一切正常,將面包板貼在主體頂部,在面包板下面放幾顆熱膠,然后將面包板放在標有Breadboard的區(qū)域在身體頂部。
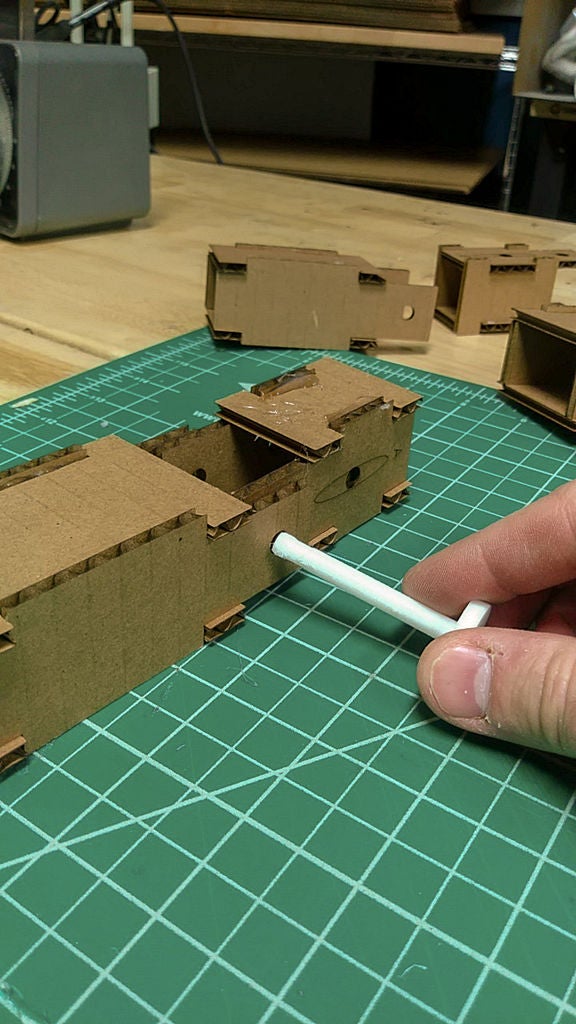
步驟7:附加腿
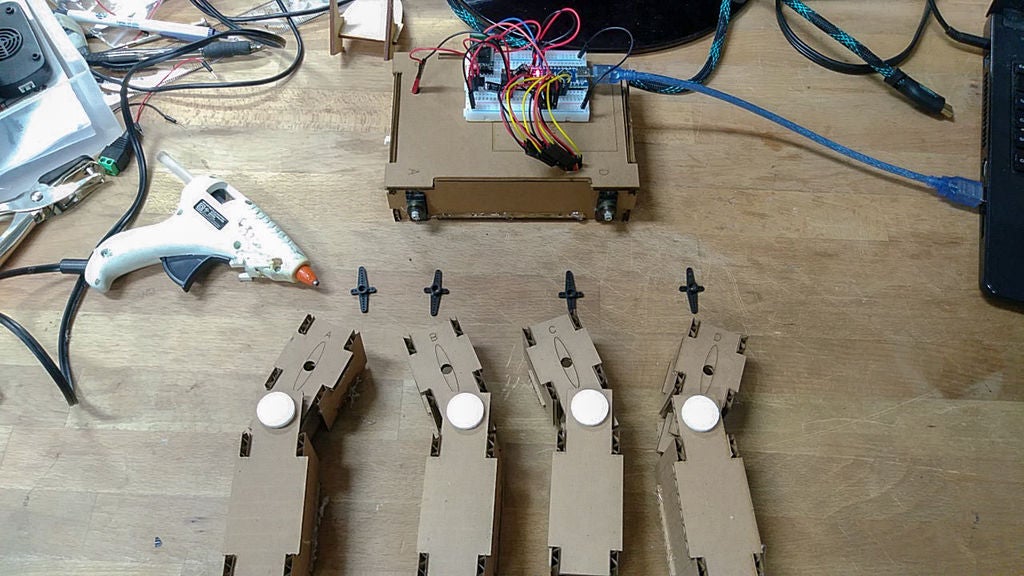




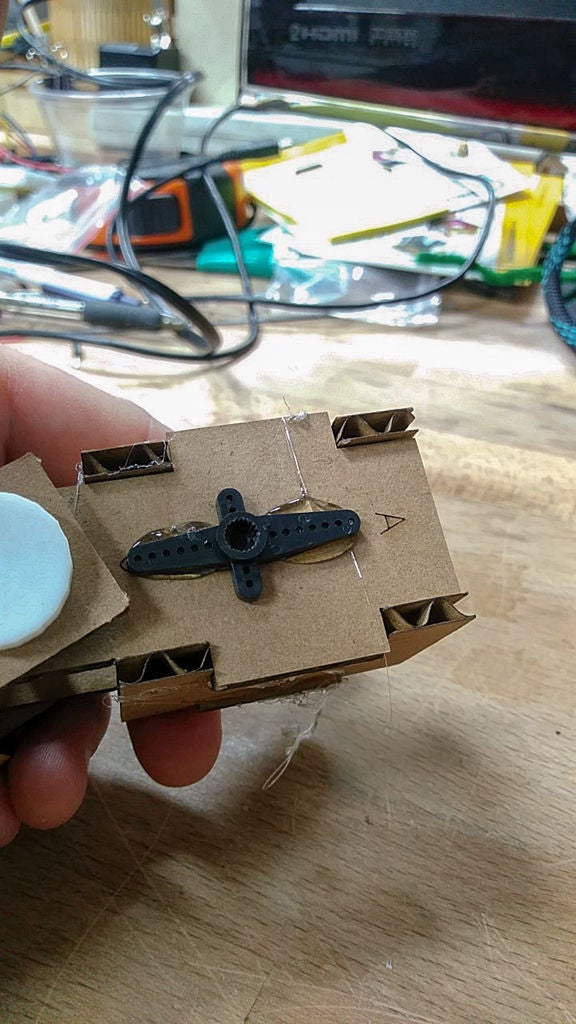





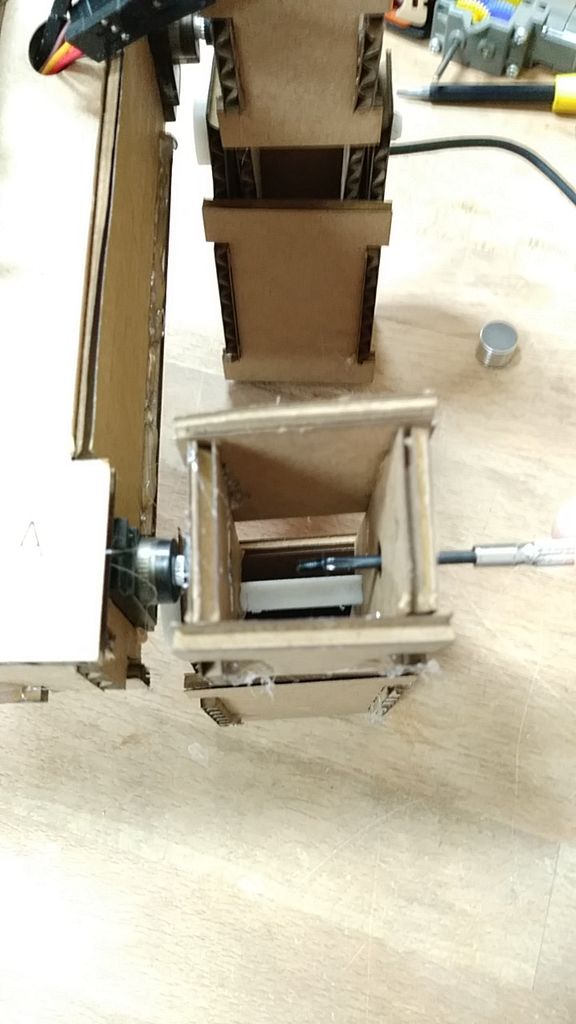


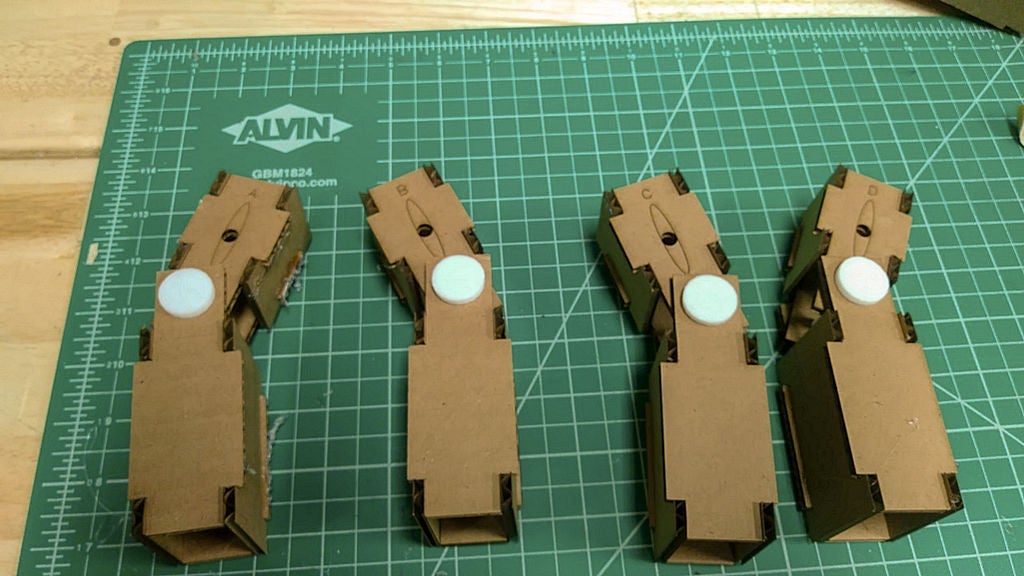
Homestretch!現在我們將把伺服喇叭添加到腿部,這樣我們就可以將它們連接到我們的機器人上。
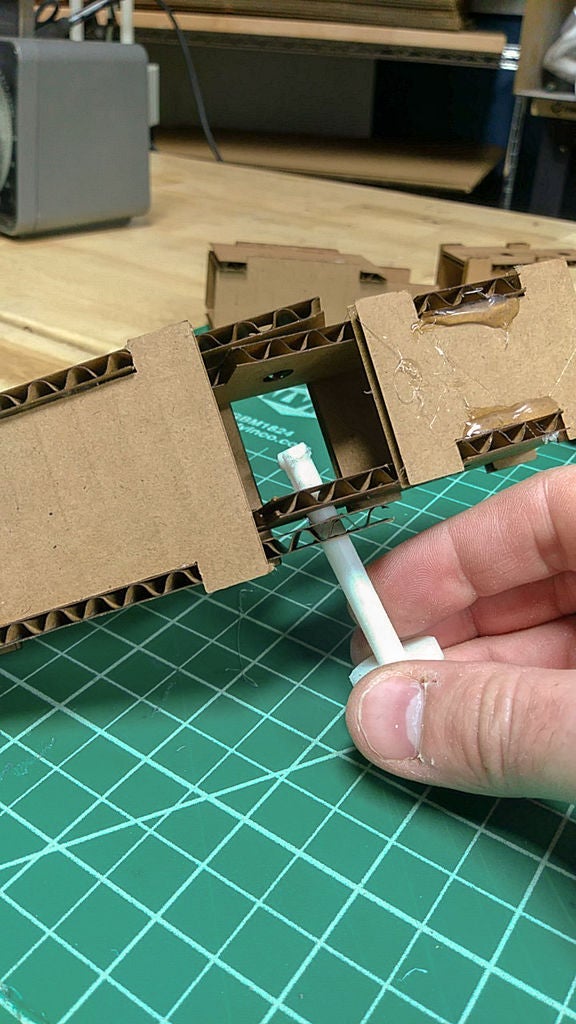
1。抓住四條腿和四個伺服喇叭。
2。注意角。很難看到,但一方比另一方長。如果計算孔數,你會發(fā)現一方有7個,另一方有6個。你使用哪一方并不重要,但你必須保持一致。如果您粘貼喇叭使得有7個孔的一側位于頂部,請為每條腿執(zhí)行此操作。否則,你的機器人將不會坐在水平,因為一條腿會略高于另一條腿。
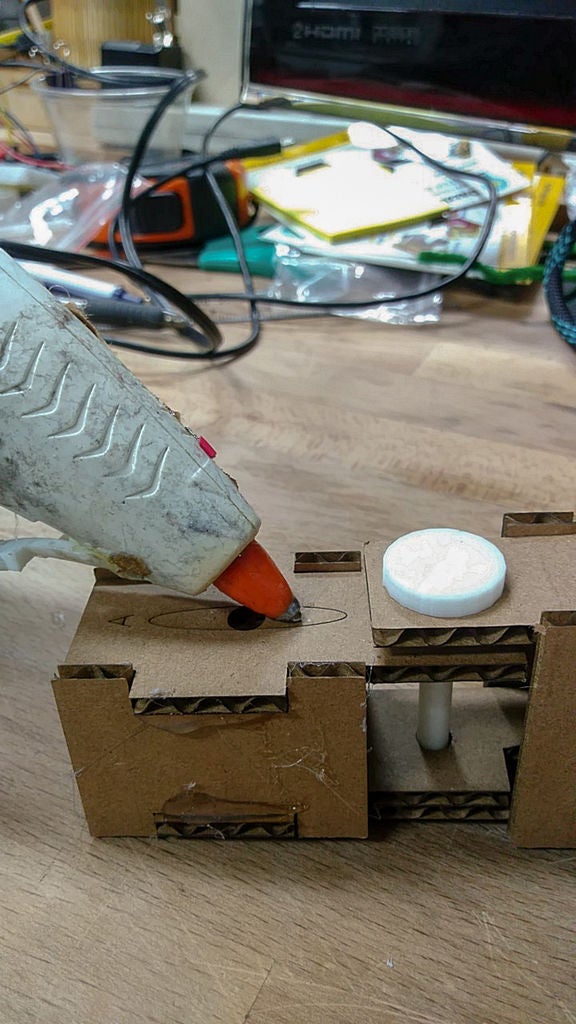
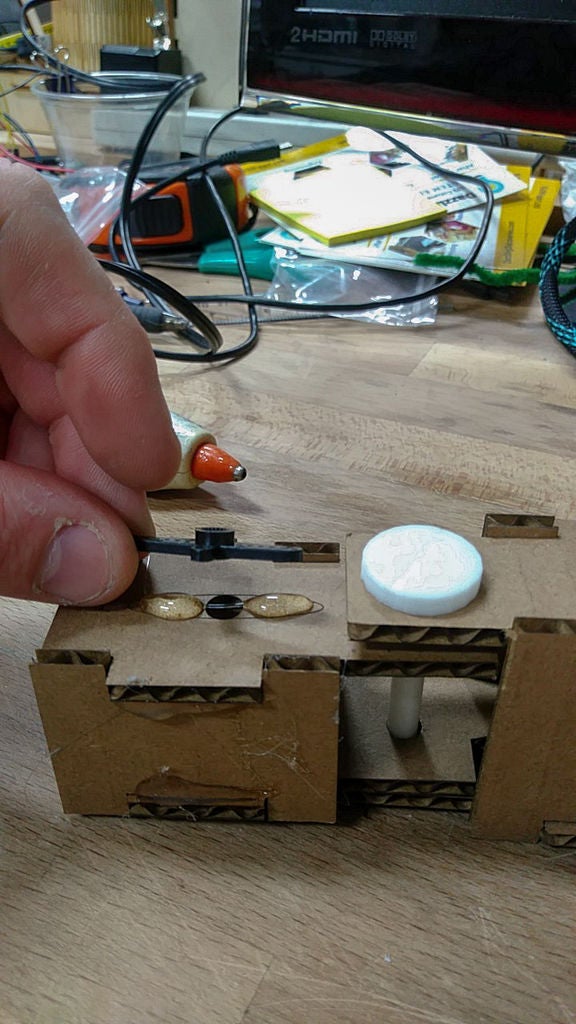
3。從腿A開始,在橢圓形內側添加一排膠水。
4。輕輕地將喇叭按入膠水,使其在橢圓形內部。嘗試將喇叭孔與橢圓形中心孔對齊。
5。每條腿重復步驟4.
6。現在只需將每條腿連接到每個伺服器上。 A到伺服A,B到伺服B,C到伺服C,D到伺服D.這將有助于查看車身頂部的標簽。
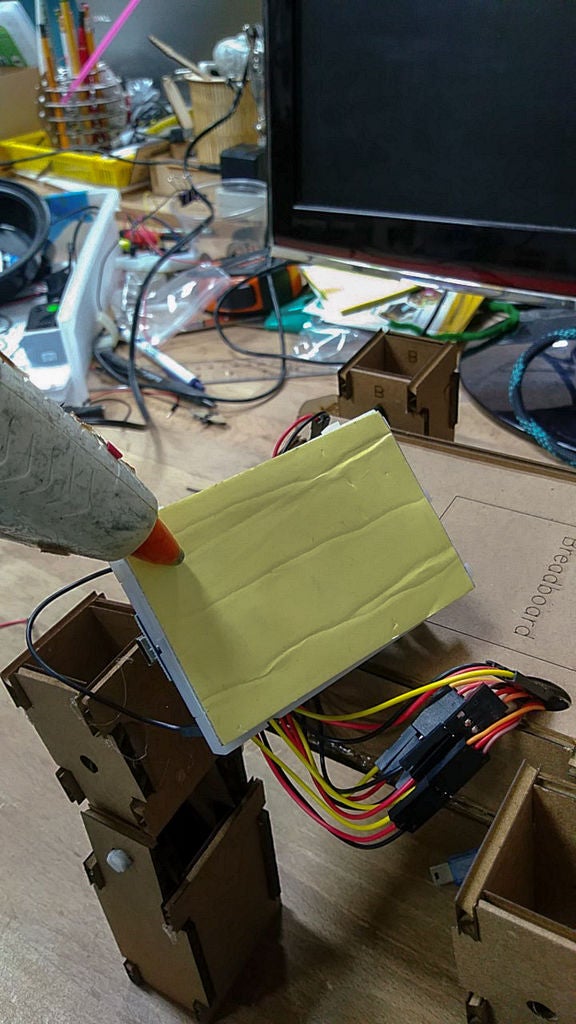
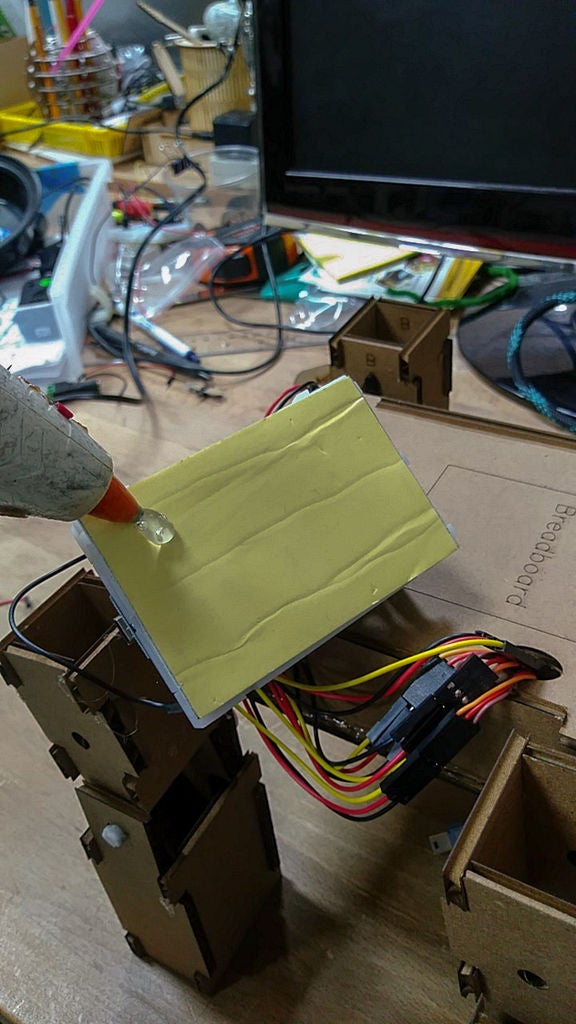
7。用少量膠水將面包板固定到位。
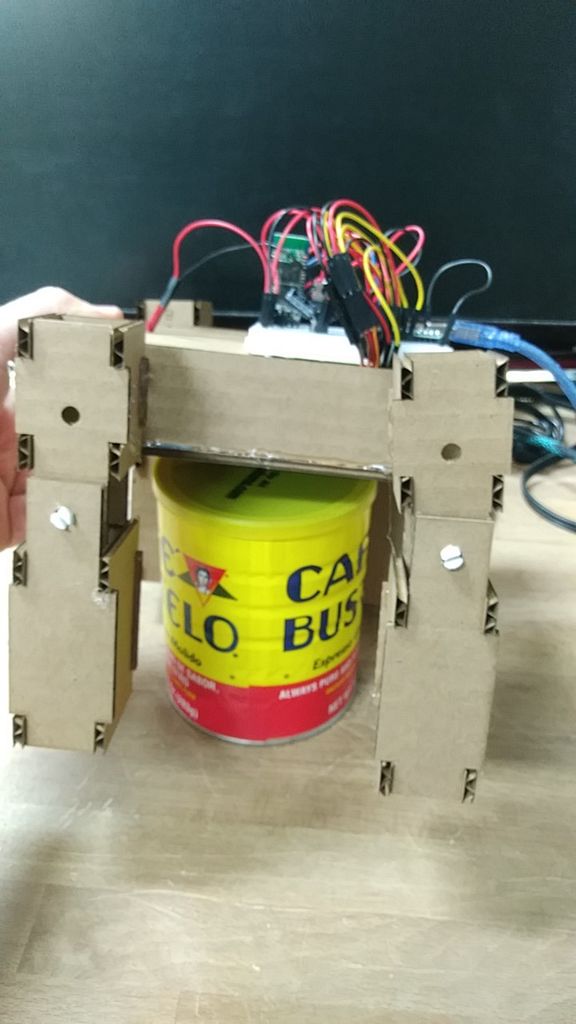
8。出于測試目的,我發(fā)現有一些東西可以讓機器人停下來。咖啡可以很好用。
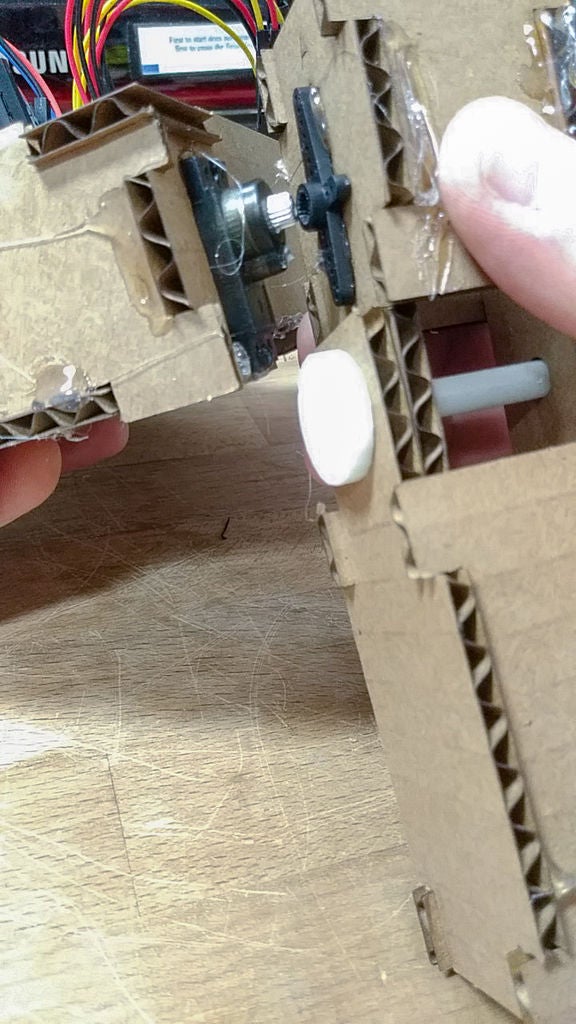
為了更好地將支腿固定在伺服系統(tǒng)上,請使用伺服系統(tǒng)隨附的喇叭安裝螺絲。拿一把小十字頭螺絲刀,將螺絲穿過支腿的孔插入伺服喇叭的孔中。磁化螺絲刀最適合這種情況。沒有嗎?好好抓住磁鐵,將螺絲刀的尖端從磁鐵上移開,就像你正在磨刀一樣。在大約10-20次通過后,尖端將具有足夠強的磁場,以便在將其引導到位時將螺釘固定到位。
步驟8:測試代碼
現在是時候測試代碼了。如果在添加腿時拔下Arduino,請將其重新插入并再次上傳代碼。
默認情況下,機器人設置為接收串行輸入。打開串行監(jiān)視器并鍵入1,然后按Enter鍵。 DoggoBot應該開始走路了。在串口窗口中輸入2將使機器人坐下。 0會使它成立。
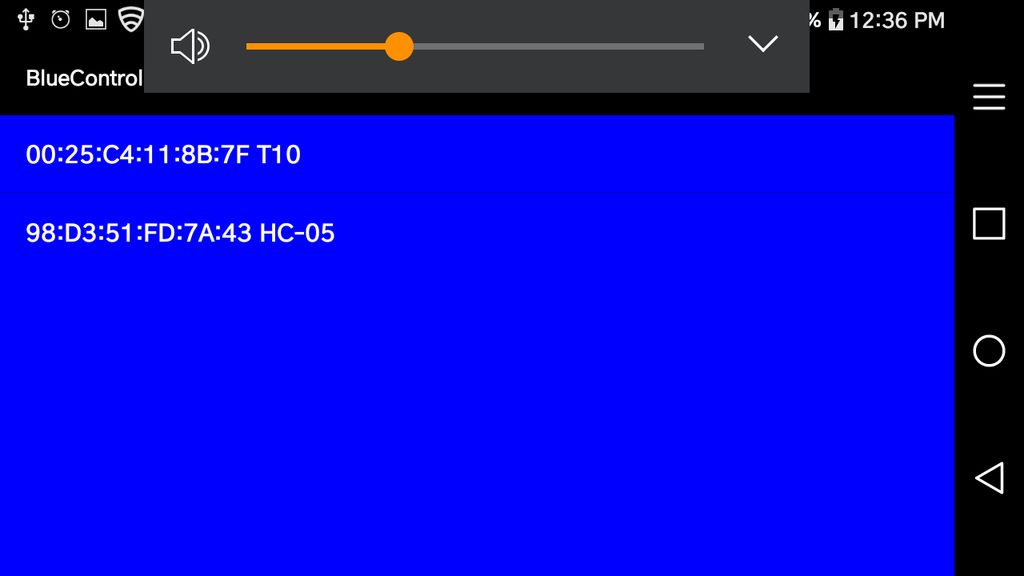
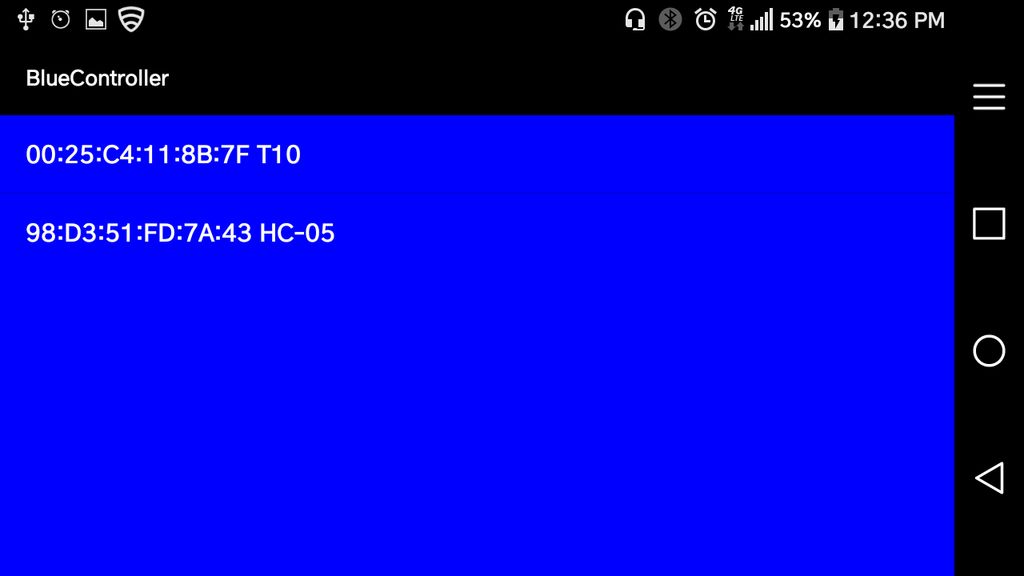
接下來我們可以測試藍牙部分。我創(chuàng)建了一個控制機器人的應用程序但不幸的是我無法將其上傳到Google Play商店。您必須手動安裝它,但不要擔心,這是一個簡單的過程。
2。確保您已將其設置為可以在計算機和手機之間傳輸文件。
3。打開DoggoBot Files文件夾并導航到MIT App Inventor文件。
4。有一個名為BlueController.apk的文件。
5。將此文件復制到手機上。
6。在手機上,導航到放置BlueController.apk文件的位置,然后單擊安裝。
7。您可能需要調整手機設置以允許安裝不是來自Google Play商店的應用。
8。或者,您可以為MIT App Inventor創(chuàng)建一個帳戶。我強烈推薦這是一個有趣的工具。
9。設置好帳戶后,將BlueController.aia文件導入您的app inventor項目。
10。選擇使用QR代碼構建應用程序的選項。
11。使用手機QR碼掃描儀掃描應用程序提供的代碼。
12。它將引導您到下載應用程序的鏈接。
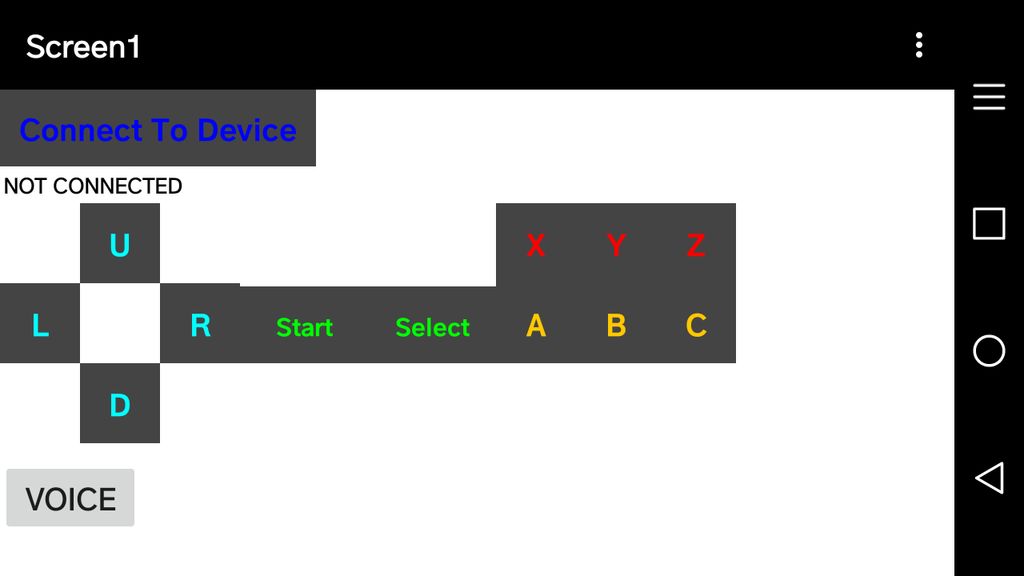
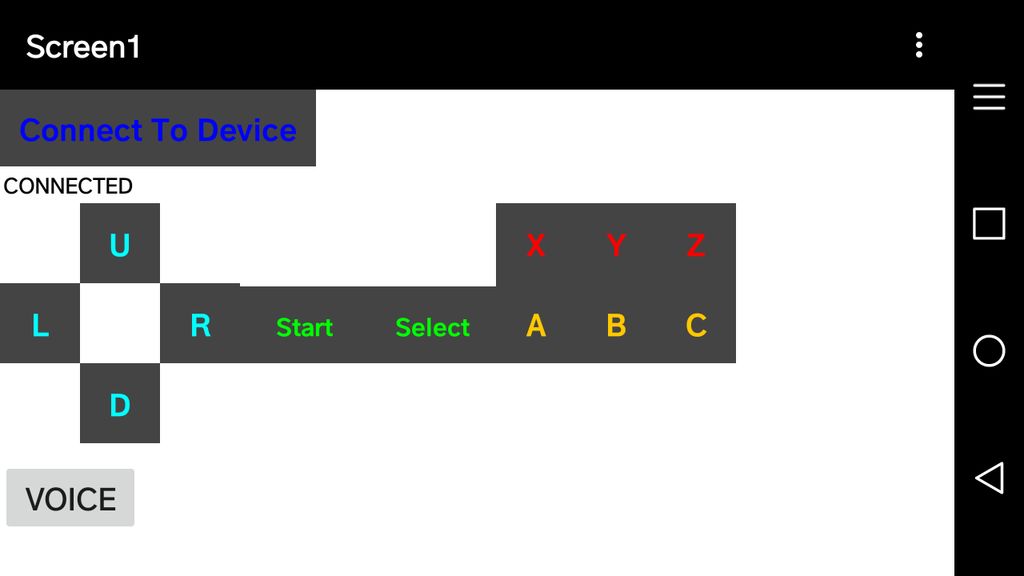
13。安裝。這里的照片是應用程序在手機上的樣子截圖。
以下是應用按鈕發(fā)送給Arduino的值:
UP =‘你’左下=‘d’左下=‘l’
RIGHT =‘r’
A =‘a’
B =‘b’
C =‘c’
X =‘x’左Y = ‘y’
Z =‘z’
START =‘s’
SELECT =‘t’
語音命令只發(fā)送一個字符串。
您可能需要調整Arduino代碼中的一些設置。如果機器人坐不好,請調整sit()函數中的pos變量,使其正常放置。使用這些變量,直到找到有效的變量。
對walkForward()函數執(zhí)行相同操作。您可能需要調整開始和結束位置的值以使DoggoBot正確行走。玩這些!機器人背后的想法是有一些可以輕松調整的東西,試試看,讓我知道它是如何工作的!
第9步:最后的步驟






應用程序的語音識別部分很好但不是很好。您可能必須調整Arduino代碼中的一些if語句,以解釋語音識別器誤解的單詞。例如,我發(fā)現“sit”經常被打斷為“set”。只需將此條件添加到blueControl()中的info語句即可解決此問題。
使用Arduino代碼中的printAll()函數查看應用程序發(fā)送的內容,以幫助您調整代碼。
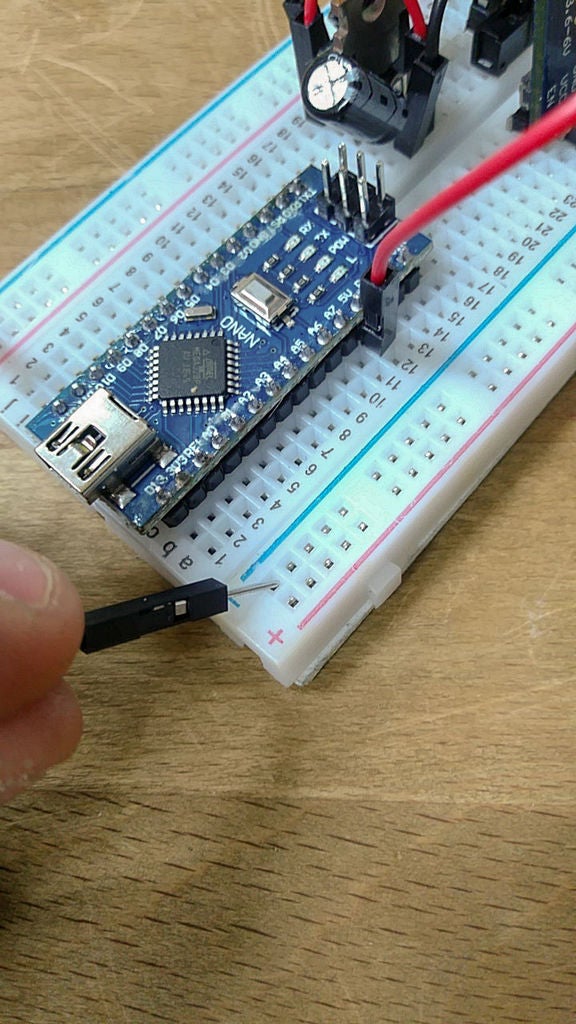
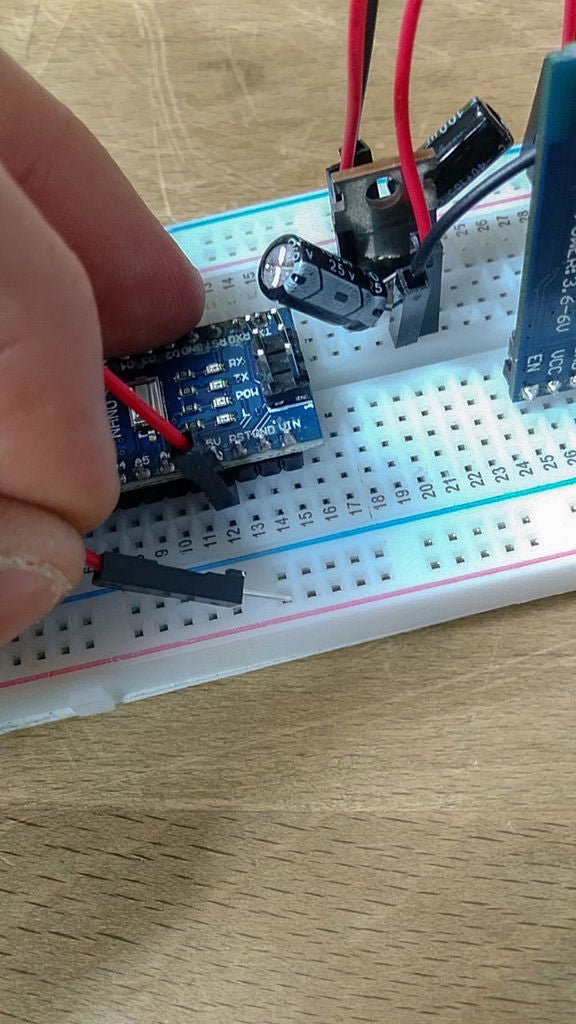
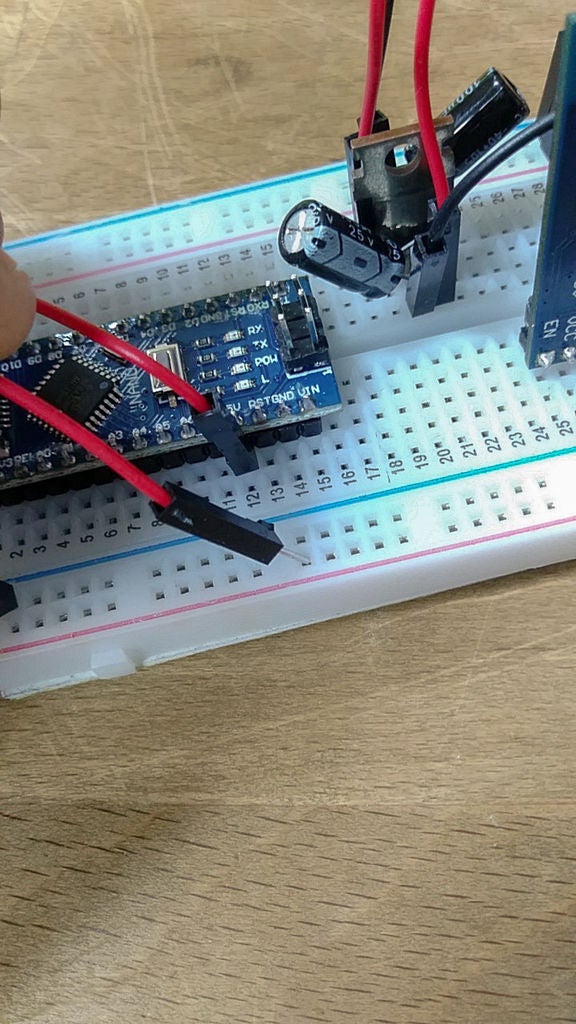
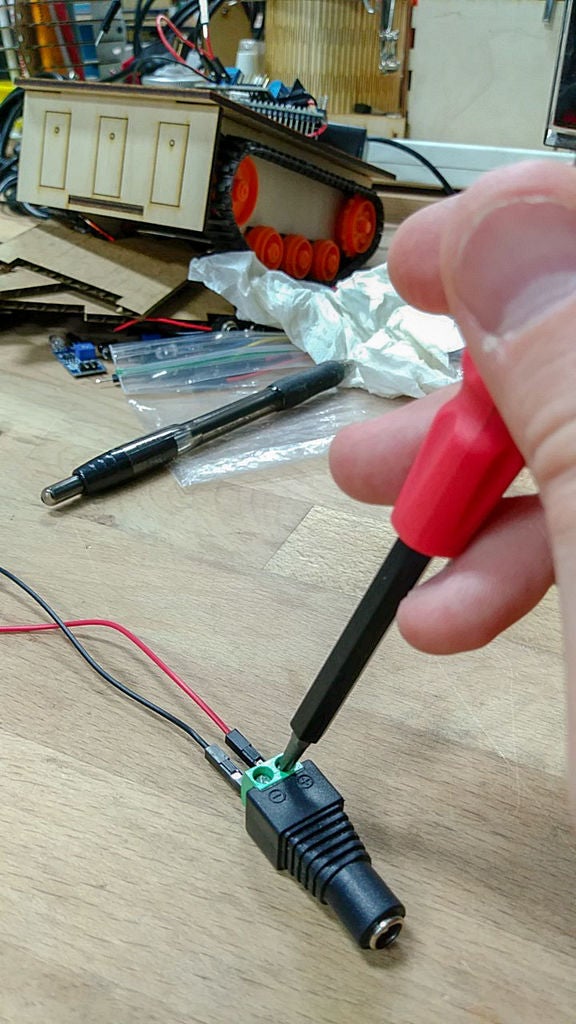
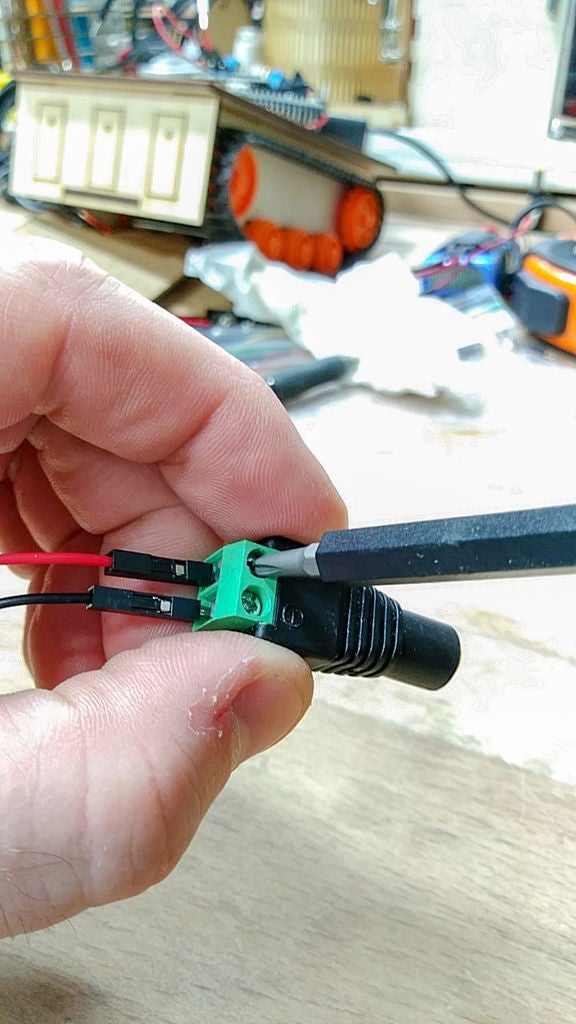
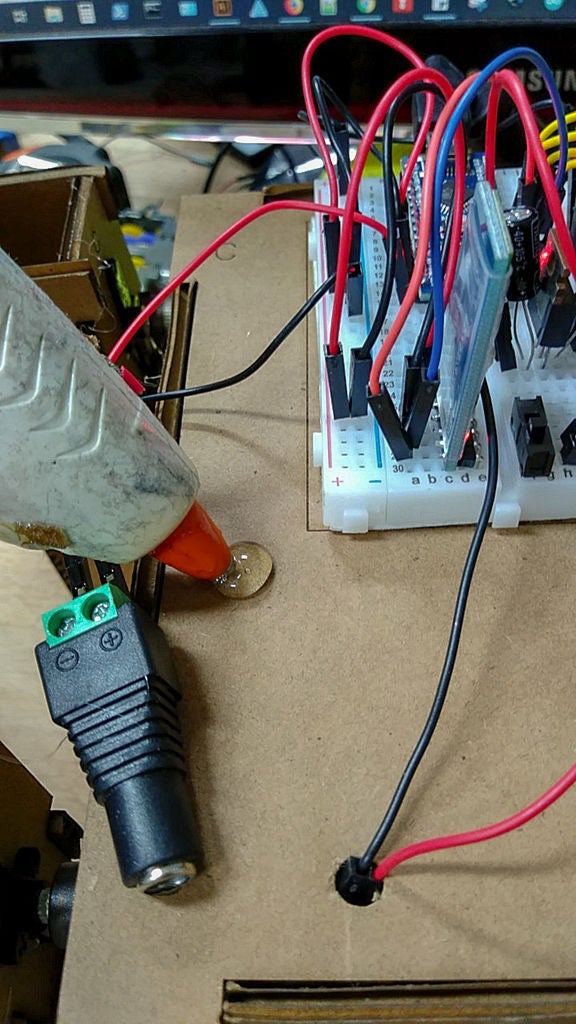
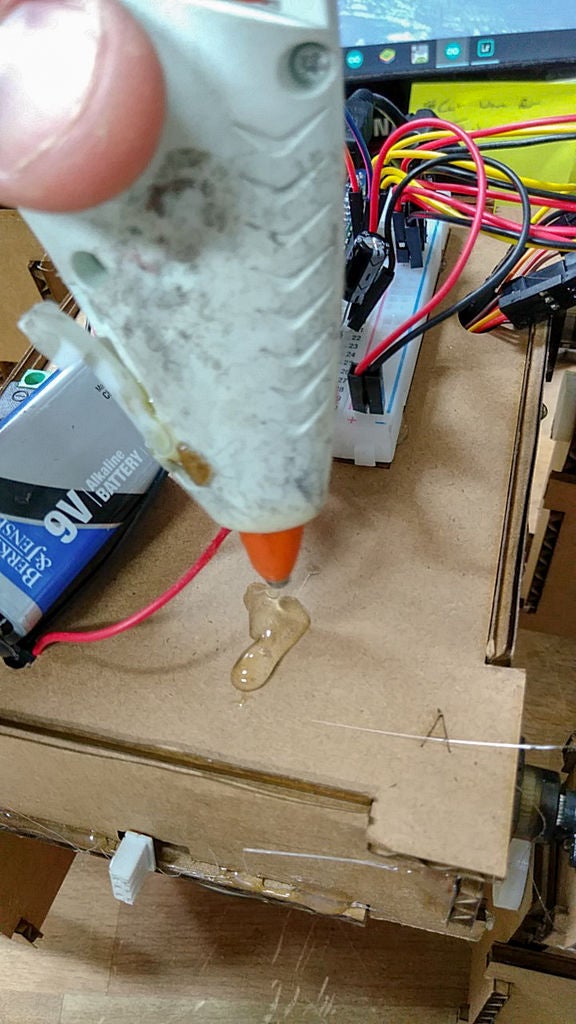
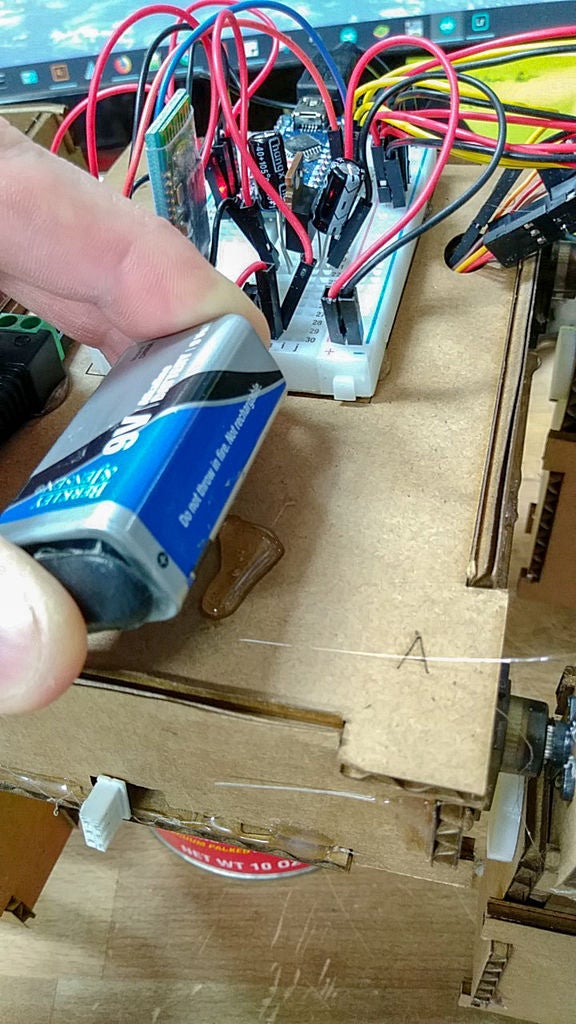
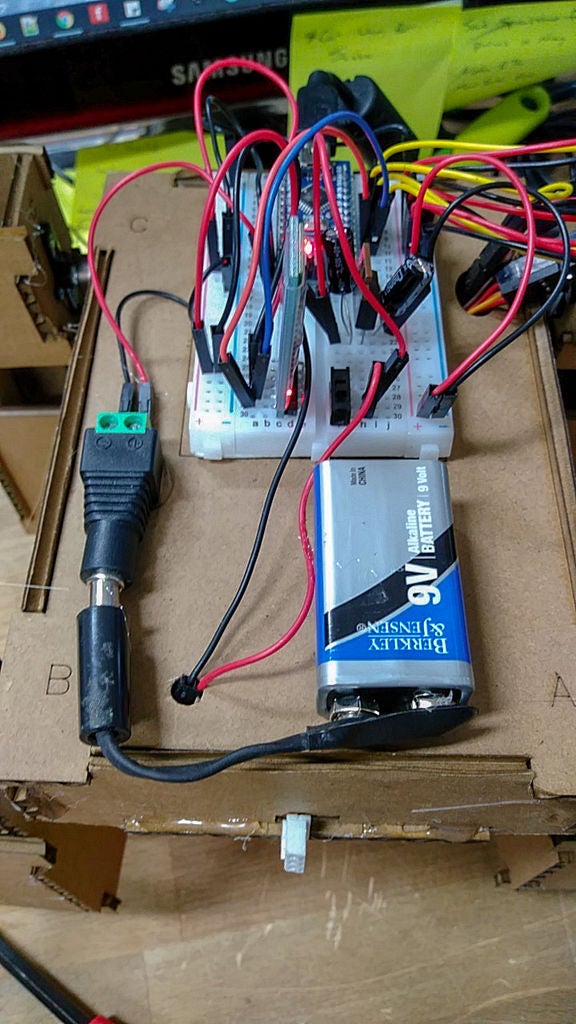
我要做的最后一步是添加一個9伏電池,以便為Arduino Nano供電,而不是使用USB電源。有幾種方法可以做到這一點,但基本上你需要將9伏的正極連接到Nano的Vin引腳,將電池的負極連接到Nano的GND引腳。
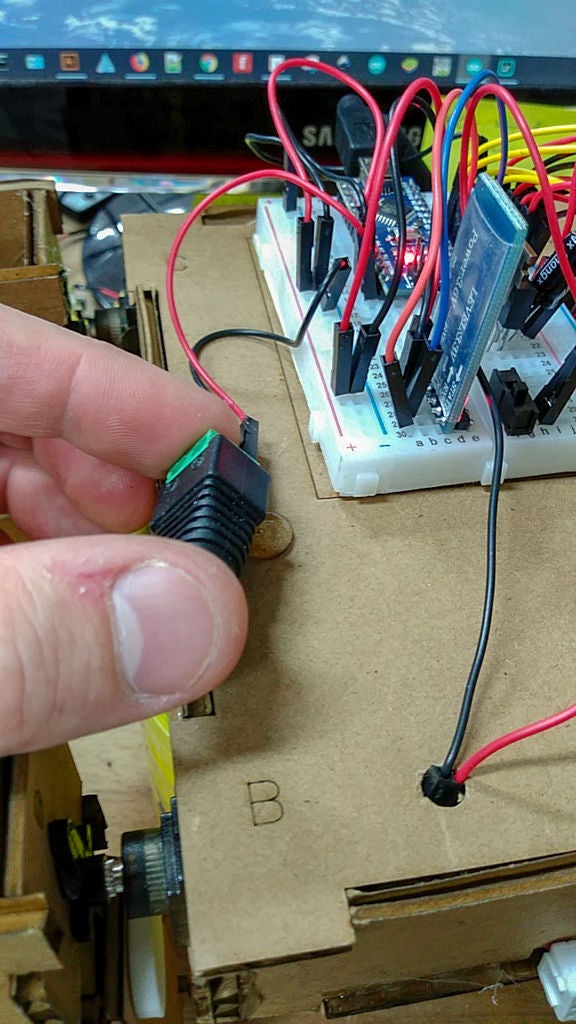
以下是我的表現。我使用了一個桶式千斤頂和一個桶式插孔適配器,因此我可以在不使用時拔掉電池。
1。將紅色跨接線連接到DC桶式插孔適配器的正極端子。
2。將黑色跨接線連接到DC桶式插孔適配器的負極端子。
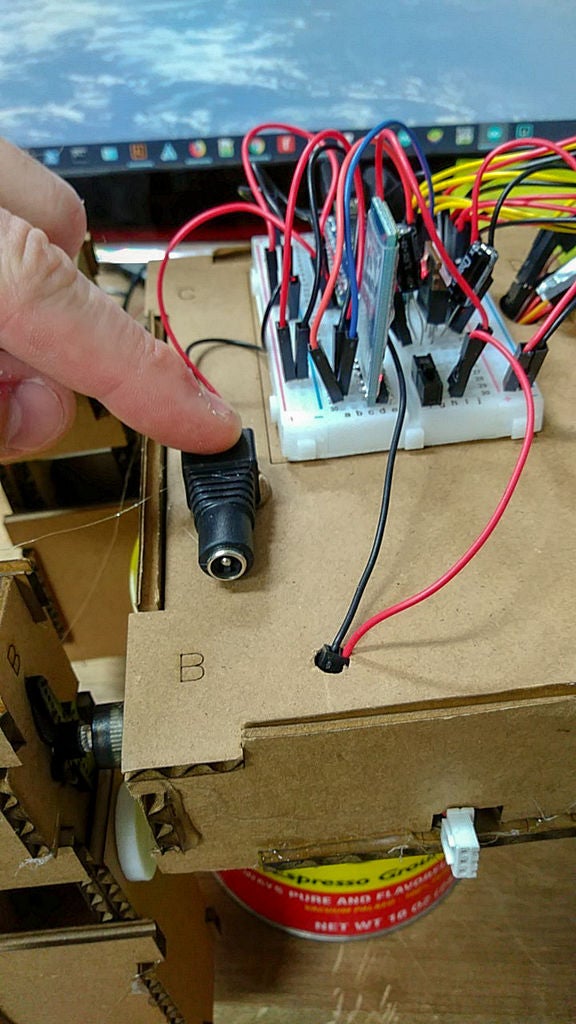
3。將紅色跨接線的自由端連接到面包板上的Nano‘s Vin針腳。
4。將黑色跨接線的自由端連接到面包板上的地線。
5。使用一點熱膠將槍管插孔適配器固定在機器人上。
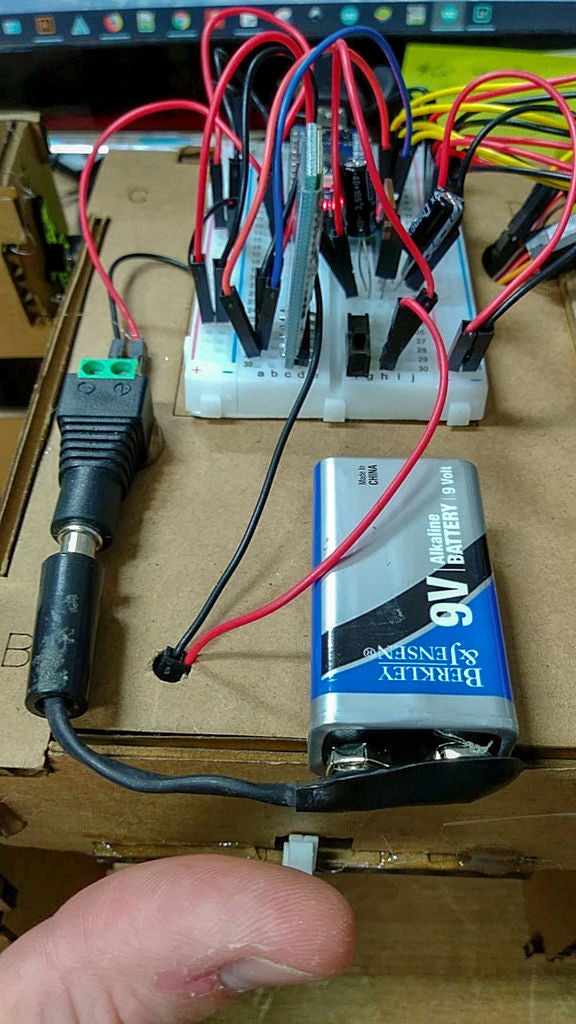
6。將9伏桶形插孔適配器連接到9伏電池。
7。確保你有足夠的空間插上和拔出槍管插孔,然后用一點熱膠將9伏固定到位。
第10步:最后的想法
這個項目是幾個月的故障排除和試驗的結果,因為這是我第一個使用Arduino的大項目。最后,我對它的出現非常滿意。我肯定想添加更多,目前正在使用版本2.我希望為機器人添加更多功能,例如車削和物體檢測。
-
機器人
+關注
關注
210文章
28212瀏覽量
206568
發(fā)布評論請先 登錄
相關推薦
天合光能獲“全過程功率測量控制評估認證”證書
紅豆Cat 1開源 項目四: 從0-1設計一款TCP版本DTU產品的軟硬件全過程
紅豆Cat 1開源 項目三: 從0-1設計一款HTTP版本RTU 支持GNSS 產品的軟硬件全過程
紅豆Cat 1開源 項目二: 從0-1設計一款MQTT版本DTU 支持GNSS 產品的軟硬件全過程
紅豆Cat 1開源 項目一: 從0-1設計一款TCP版本RTU 支持Modbus+GNSS 產品的軟硬件全過程
解讀PyTorch模型訓練過程
精準到毫米:H9激光切管機鋁材切割與打孔全過程解析

為什么四足機器人設計常借鑒狗的外形特征?
物聯網與醫(yī)療廢物處置全過程電子信息化跟蹤管理系統(tǒng)研究
底層硬件加大模型,智能機器狗拓展更多落地應用
永磁同步電機全速域矢量控制的全過程介紹






 工商網監(jiān)
工商網監(jiān)
評論