") 音圈電機(jī)驅(qū)動(dòng)電路
音圈電機(jī)驅(qū)動(dòng)電路
音圈電機(jī)驅(qū)動(dòng)電路
最近做一個(gè)音圈電機(jī)驅(qū)動(dòng)電路,找到的資料給了這樣一個(gè)電路。控制信號(hào)從單片機(jī)的DAC接口取出,經(jīng)過(guò)一級(jí)放大電路放大兩倍,由一個(gè)限壓二極管把電壓限制在1V防止異常信號(hào)放大后燒毀電機(jī)。驅(qū)動(dòng)電流使用的是放大器和MOS管組成的電壓源轉(zhuǎn)電流源電路。過(guò)電流為I=Vin/R47, NMOS管采用的是2SK428開(kāi)關(guān)管。
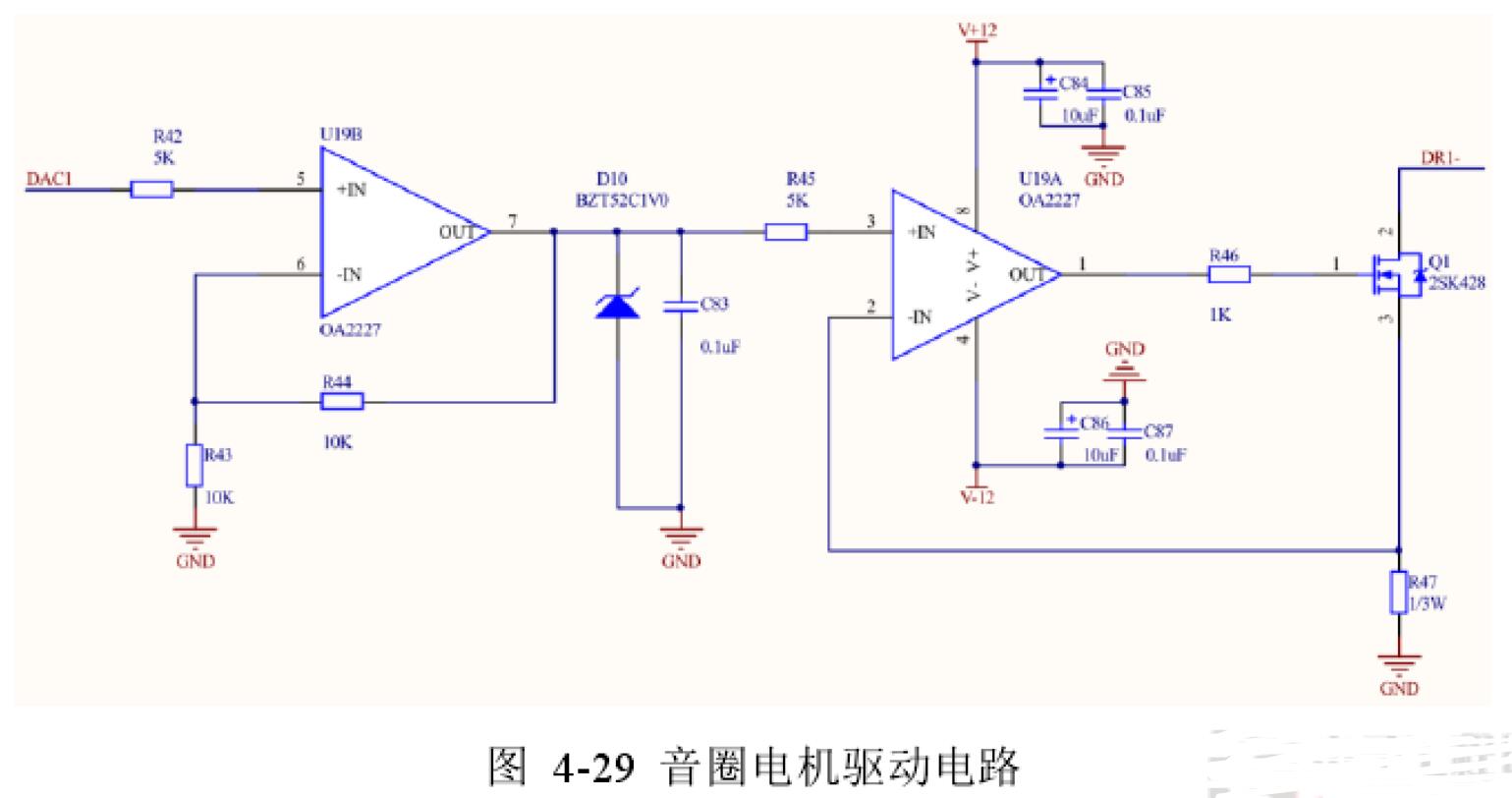
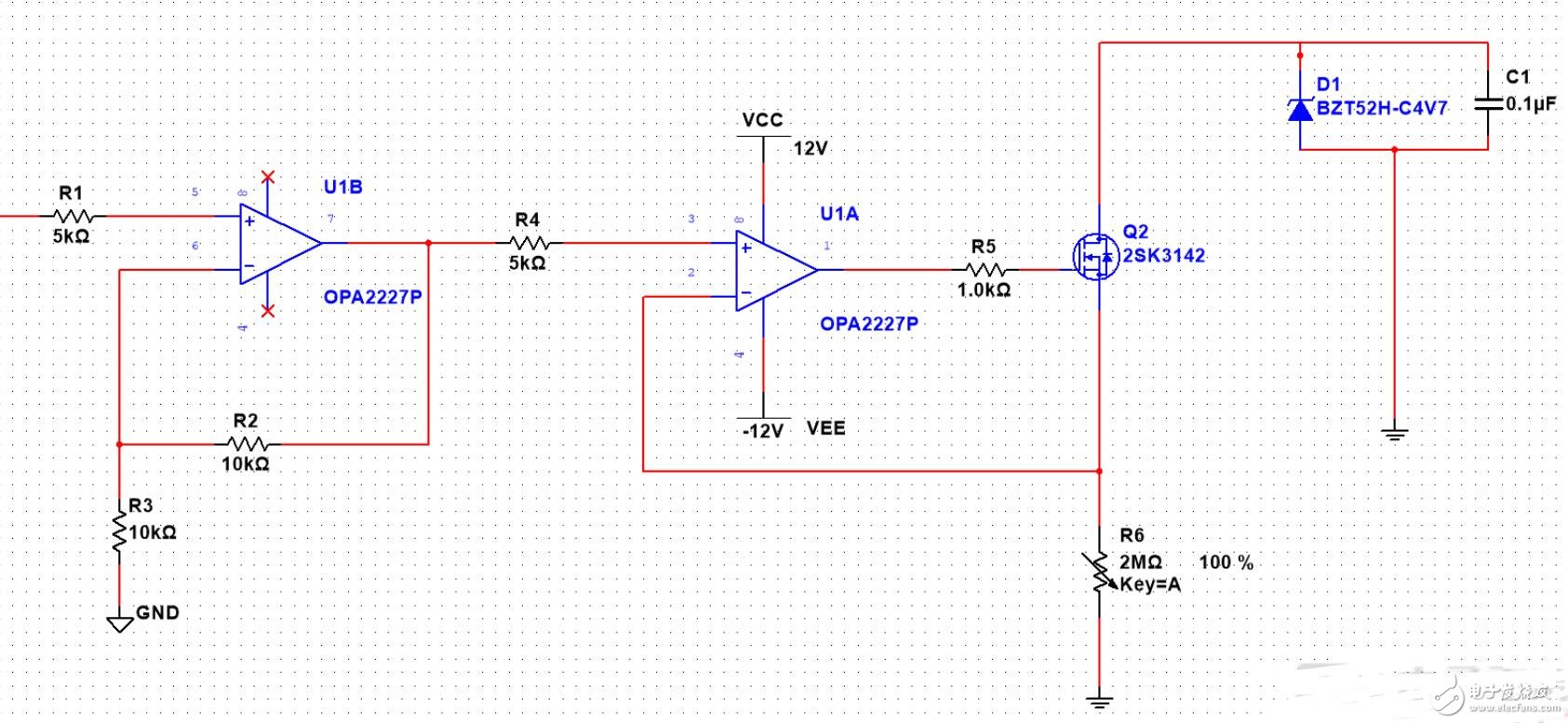
音圈電機(jī)的最大電壓是4.8V,最大電流是1.21A。經(jīng)過(guò)multisim仿真后輸出大概滿足設(shè)計(jì)要求,我的問(wèn)題是這個(gè)驅(qū)動(dòng)電路應(yīng)該如何和音圈電機(jī)連接。1種是驅(qū)動(dòng)電路的輸出和音圈電機(jī)的正極相連,音圈電機(jī)的負(fù)極和地GND相連。2種是需要外接一個(gè)6.5V的電壓,此時(shí)的驅(qū)動(dòng)電路應(yīng)該如何與音圈電機(jī)連接,電路圖如下:
音圈電機(jī)應(yīng)用原則
音圈電機(jī)有它獨(dú)特的應(yīng)用,是旋轉(zhuǎn)電機(jī)所不能替代的。但是并不是任何場(chǎng)合使用直線感應(yīng)電機(jī)都能取得良好效果。為此必須首先了解音圈電機(jī)的應(yīng)用原則,以便能恰到好處地應(yīng)用它。其應(yīng)用原則有以下幾個(gè)方面:
1.選擇合適的運(yùn)動(dòng)速度。音圈電機(jī)的運(yùn)動(dòng)速度與同步速度有關(guān),而同步速度又正比于極距。因此極距的選擇范圍決定了運(yùn)動(dòng)速度的選擇范圍。
2.要有合適的推力。旋轉(zhuǎn)電機(jī)可以適應(yīng)很大的推力范圍。將旋轉(zhuǎn)電機(jī)配上不同的變速箱,可以得到不同的轉(zhuǎn)速和轉(zhuǎn)矩。在低速的場(chǎng)合,轉(zhuǎn)矩可以擴(kuò)大幾十到幾百倍,以至于用一個(gè)很小的旋轉(zhuǎn)電機(jī)就可以推動(dòng)一個(gè)很大的負(fù)載,當(dāng)然功率是守恒的。音圈電機(jī)(馬達(dá))則不同,它無(wú)法用變速箱改變速度和推力,因此它的推力無(wú)法擴(kuò)大。要得到比較大的推力,只有依靠加大電動(dòng)機(jī)的尺寸。這有時(shí)是不經(jīng)濟(jì)的。一般來(lái)說(shuō),在工業(yè)應(yīng)用中,音圈電機(jī)適用于推動(dòng)輕載。
3.要有合適的往復(fù)頻率。在工業(yè)應(yīng)用中,音圈電機(jī)是往復(fù)運(yùn)動(dòng)的。為了達(dá)到較高的勞動(dòng)生產(chǎn)率,要求有較高的往復(fù)頻率。
4.要有合適的定位精度。在許多應(yīng)用場(chǎng)合,電動(dòng)機(jī)運(yùn)行到位時(shí)由機(jī)械限位使之停止運(yùn)動(dòng)。為了使在到位時(shí)沖擊小,可以加上機(jī)械緩沖裝置。在沒(méi)有機(jī)械限位的場(chǎng)合,比較簡(jiǎn)單的定位方法是,在到位前通過(guò)行程開(kāi)關(guān)控制,對(duì)電機(jī)做反接制動(dòng)或能耗制動(dòng),使在到位時(shí)停下來(lái)。而音圈電機(jī)具有非常高的定位精度。
-
驅(qū)動(dòng)電路
+關(guān)注
關(guān)注
152文章
1520瀏覽量
108379 -
音圈電機(jī)
+關(guān)注
關(guān)注
4文章
436瀏覽量
18114
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
音圈電機(jī)的主要應(yīng)用模式
音圈電機(jī)
什么是音圈
音圈電機(jī)是什么
音圈電機(jī)的技術(shù)原理
有關(guān)音圈電機(jī)的資料
音圈電機(jī)和音圈電機(jī)模組有什么不同
音圈電機(jī)驅(qū)動(dòng)器如何選型
音圈電機(jī)、音圈電機(jī)模組之間的關(guān)聯(lián)與區(qū)別
ISMC的驅(qū)動(dòng)器為什么適合用來(lái)控制音圈電機(jī)
直線型音圈電機(jī)模組介紹
音圈電機(jī)介紹
音圈電機(jī)和直線電機(jī)的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論