 機器人電氣系統詳解
機器人電氣系統詳解
步驟1:術語
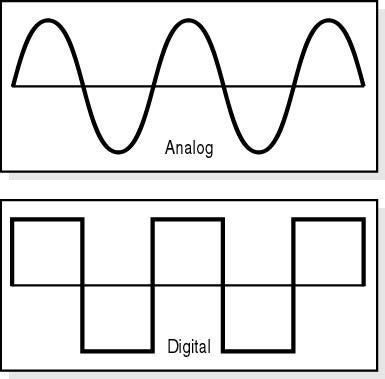
數字信號:數字信號只有兩種狀態:打開或關閉。與數字信號通信的機器人組件通常通過改變它們在開和關之間交替的頻率來實現。
模擬信號:與具有離散值的數字信號不同,模擬信號的輸出具有連續的值范圍。使用模擬信號的機器人組件通過改變信號電壓進行通信。
PWM電纜:脈寬調制(PWM)電纜是一種通常用于允許機器人組件之間通過以下方式相互通信的電纜:數字或模擬信號。最常見的是,它們有3根電線,但是有些版本卻有1至5根電纜。
CAN:在FRC中,控制器局域網(CAN)用于控制電機控制器。幾個電機控制器串行連接到同一網絡,然后由中央處理器控制。
編碼器:編碼器是用于測量旋轉的傳感器。它使用數字信號來傳達其所連接的軸已經旋轉了一定程度的“ 1個計數”。編碼器之間每轉一圈的計數數量會有所不同,但每轉可以從一千到一千。 li》
照片來源:http://www.dallasmobilec.com/AnalogDigital.html
步驟2:CRIO
cRIO是FRC機器人的中央處理單元。使用在LabVIEW,C ++或Java中生成的代碼,它從驅動器和傳感器獲取輸入,并將指令輸出到電動機,氣動電磁閥和其他設備。盡管其操作就像將操縱桿值映射到電動機速度一樣簡單,但它也可以執行復雜的控制循環和自動命令。 cRIO是模塊化的,允許團隊對其進行自定義以滿足其機器人的需求。
團隊可能會遇到兩種版本的cRIO。第一張圖片顯示了cRIO-FRC,第二張圖片顯示了cRIO-FRC II。這兩個版本之間唯一的實際區別是它們支持的模塊數量。 cRIO-FRC支持八個模塊,而cRIO-FRC II支持四個模塊。受支持的模塊數量減少,也可以使cRIO變得更輕便,占地面積也更小。 cRIO-FRC II從2012年開始提供給新手團隊,老兵團隊可以選擇購買一個。
作為機器人的隱喻大腦,cRIO與控制系統的許多不同部分相連。它的可交換模塊可用于將其連接到Digital Sidecar,Analog Breakout和螺線管Breakout。 cRIO由配電板的24V連接供電。它通過以太網電纜連接到D-Link路由器,從而使其能夠與連接到路由器的其他組件以及與Drive Station無線通信。最后,cRIO有一個串行端口,可用于通過CAN總線與Jaguars連接,這是控制Jaguars的一種選擇。
圖片來源:
http://www.chiefdelphi.com/media/photos/31871
https://decibel.ni.com/content/docs/DOC-19103
步驟3:控制板
Digital Sidecar是一個模塊,充當發送到cRIO和從cRIO發送的數字信號的集線器。它接收的信號從輸出數字信號的傳感器(例如編碼器或氣壓開關)發送。它發送的信號用于控制電機控制器或伺服電機等設備。
Digital Sidecar通過DB37帶狀電纜連接到cRIO模塊。它通過PWM電纜連接到傳感器,Jaguar和Victor電動機控制器以及Spike繼電器。它由與配電板的12V連接供電,并通過2針PWM電纜為Signal LED供電。
Analog Breakout是允許cRIO將模擬信號作為輸入的模塊。模擬輸入與電位計和紅外測距儀等傳感器一起使用。此外,它還提供了一個選項來測量來自模擬輸入之一的電池電壓。
模擬中斷直接連接到cRIO NI 9201模擬輸入模塊。它通過12V連接到配電板的電源接收電力,并通過PWM電纜接收來自傳感器的數據。
電磁閥中斷是一個模塊,允許cRIO控制氣動系統中使用的電磁閥。它可以為12V或24V螺線管供電,但一次只能供電一種。
電磁閥分支直接連接到cRIO NI 9472數字源模塊。它通過與配電板的12V連接或從也提供給cRIO的24V電源獲得電源。電磁閥中斷通過2針PWM電纜將命令發送到電磁閥。數碼%20Sidecar.pdf結果http://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Analog%20Breakout.pdf點擊HTTP://www.usfirst。 org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Solenoid%20Breakout.pdf
第4步:配電
12伏鉛酸電池為FRC機器人上的所有電氣系統供電。
12V電池的正極端子。連接到120 Amp斷路器,而負極端子直接連接到配電板。
120 Amp斷路器是機器人的打開/關閉開關。它還可以將機器人上所有電子設備的電流消耗限制為120A,盡管該限制可以在短時間內斷開。
120 Amp斷路器在一個端子上從機器人12V電池的正極直接連接,將其連接到配電板的正極端子。
配電板將電源從12V電池分配到機器人上的所有不同組件。它還通過使用20、30和40安培自動復位斷路器來調節每個組件的功耗。
配電板幾乎連接到控制系統的每個部分。其主要正極端子連接到120 A斷路器,而其主要負極端子直接連接到電池。它具有用于cRIO和電磁突圍的24V連接,用于攝像機的5V連接以及用于路由器電源轉換器的專用12V連接。它具有8個12V連接,可以吸收40安培的電流,還有12個12V端子,可以吸收30安培的電流。這些端子連接到許多組件,例如電動機控制器,cRIO分支板,甚至是定制電路。
機器人配電系統的最后一部分是路由器電源轉換器。此組件將專用于路由器的12V電源轉換為D-Link路由器所需的電壓。
路由器電源轉換器連接到配電板的12V路由器連接以及D-Link路由器本身。
圖片來源:
http://www.batterystore.com/Yuasa/YuasaImages/NP18-12.jpg
http://www.andymark.com/product-p/am-0282.htm
http://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Power%20Distribution%20Board.pdf點擊http://www.andymark.com/product- p/am-0899.htm
第5步:電機控制器
Jaguar馬達控制器有兩種版本:一種是黑色塑料,另一種是灰色塑料。這兩個版本之間的差異是相當技術性的,因此在本教程中我不會解決。捷豹為其連接的電動機提供速度和方向控制。控制它們的最常見方法是使用PWM電纜,但是它們可以通過CAN總線連接。通過CAN總線連接Jaguars可以釋放電動機控制器中的其他功能。例如,CAN連接將允許團隊將編碼器連接到Jaguar,并使用其處理能力來進行速度和位置的閉環控制。
Jaguar電動機控制器的主要連接是配電板的12V電壓之一。輸出并連接到電動機。盡管Jaguar必須以正確的極性連接到配電板上的端子,但是可以在Jaguar的輸出上交換電動機的極性。但是,這樣做會根據代碼給出的方向交換電動機的旋轉方向。此外,如果使用PWM控制,則捷豹通過PWM電纜連接到Digital Sidecar,如果使用CAN控制,則連接到cRIO的串行端口。最后,可以將編碼器連接到Jaguar的5針PWM端口,以進行閉環速度和位置控制。
Victor 884電動機控制器與Jaguar電動機控制器非常相似。像捷豹一樣,它可以控制與其相連的電動機的速度和方向。但是,只能用PWM電纜控制Victor,因此無法利用CAN總線提供的優勢。盡管如此,許多經驗豐富的團隊仍繼續使用Victor,因為它們的占地面積更小且被認為更可靠。
Victor電動機控制器通過其12V端子之一連接至配電板,并直接連接至電動機。它由Digital Sidecar通過PWM控制。最后,必須將Victor的冷卻風扇與走線到配電板的電線連接。
Spike繼電器實質上是用作組件的開/關開關。當與電動機一起使用時,可用于正向,反向或斷開驅動它們。 Spike還可以用于打開或關閉其他電子設備,例如燈或壓縮機。最后,除了配電板上的斷路器外,Spike繼電器還有一個用于20安培斷路器的端口。
Spike連接到配電板的12V 30安培端子之一。它的輸出可以連接到電動機,壓縮機,照明燈或電磁閥。它通過與數字邊車的PWM連接進行控制。
照片來源:http://files.chinaaet.com/images/2012/05/08/efdf49ff-fced-45d9-8048-ab8f0730d62c.jpg結果http://team358.org/files/programming/ControlSystem2009-/components.php結果http://www.vexrobotics.com/products/vexpro/victor-speed-controller.html點擊HTTP://www.vexrobotics.com/products/vexpro/217-0220.html
步驟6:其他
在競爭中,D-Link DAP-1522路由器允許駕駛員無線控制機器人。它使用Wi-Fi在機器人和駕駛員控制站之間建立無線網橋。
D-Link路由器通過路由器電源轉換器供電,并通過以太網電纜連接到cRIO。路由器還可以通過以太網連接到其他設備,從而允許它們與cRIO和驅動程序站進行通信。最常使用這種連接方式的設備是Axis攝像機。
Rockwell Signal LED用于警告機器人周圍的人它正在運行,并傳達有關其當前狀態的其他信息。信號LED總共使用五種不同的閃爍模式。以下是不同模式及其指示的列表:
穩定開啟:自主模式
短路關閉:(1500ms開啟,100ms關閉):遙控模式
慢速閃爍(打開900毫秒,關閉900毫秒)
快速閃爍(打開200毫秒,關閉200ms):由于沒有駕駛員站通訊,錯誤的cRIO圖像,錯誤的團隊ID而導致系統錯誤,或出現許多通信錯誤
快慢閃爍(打開200毫秒,關閉900毫秒):電池電量低和系統被系統監視程序,用戶監視程序或設置為禁用的Driver Station禁用。
Rockwell Signal LED通過2針PWM電纜連接到Digital Sidecar。
有兩個攝像頭可以連接到機器人,用作視覺處理的傳感器,也可以用作反饋設備。司機。盡管有兩種型號的攝像機,即Axis M1011和Axis 206,但它們在功能上是等效的。
攝像機通過專用的5V連接從配電板接收電源。它還通過以太網電纜連接到D-Link路由器,從而使其可以與cRIO和驅動程序站進行通信。
圖片來源:
http://www.andymark.com/product-p/am -0839.htm結果http://raise.rockwellautomation.com/RAConfig/config.asp?cmd=edit&CID=B4E7802D0FE341B89316216E3527C565點擊http://www.icode.co.uk/icatcher/cctvshop/axis-m1011 -network-camera-p-372.html
http://www.vitechsecurity.co.uk/images/axis_206.jpg
第7步:駕駛員站
Driver Station便攜式計算機是控制機器人的便攜式計算機。盡管FIRST為該角色提供了Classmate上網本,但團隊可以選擇在其他筆記本電腦上安裝Driver Station軟件。通過提供比賽,軟件開發和調試的重要信息,Driver Station充當控制機器人的儀表板。有些團隊將諸如視覺處理的任務從cRIO轉移到Driver Station,從而使代碼運行得更快,并減輕了cRIO的負擔。
Driver Station必須連接到團隊希望使用的任何控件。這些控制器與可選的賽普拉斯板一起通過標準USB連接進行連接。在建造季節中,Driver Station可以通過Wi-Fi與機器人直接通信,但在比賽期間必須通過提供的以太網電纜插入。筆記本電腦由制造商使用的任何電源供電。競賽期間,競賽還提供了Classmate的電源連接。
賽普拉斯FirstTouch板是芯片上的Arduino供電系統,允許團隊為他們的機器人創建自定義控制接口。
FirstTouch連接到驅動程序帶有隨附USB電纜的工作站筆記本電腦。它還可以連接到團隊選擇使用常規電纜使用的任何自定義按鈕。
驅動程序控制站的最后一個組件是控制器本身。團隊可以選擇使用幾乎任何USB供電的控制器,無論它是隨附的操縱桿,Xbox 360游戲手柄還是他們選擇的其他控制器之一。許多團隊分散了控制機器人的職責,由一個人駕駛,另一人控制機器人。在這種情況下,團隊可以混合使用并匹配其控制器,以迎合其駕駛員的喜好。
圖片來源: http://team358.org/files/programming/ControlSystem2009-/components.php結果http://www.andymark.com/Attack3-p/am-0598.htm點擊http://ownedgamers.com/wp-content/uploads/2012/04/xbox-360-controller-recovers-stolen-console.jpg
第8步:文檔
希望本教程可以幫助您熟悉FIRST機器人大賽中使用的控制系統。如果您想了解有關FRC控制系統的更多信息,最好的學習方法是閱讀FIRST和零件制造商提供的技術文檔。我在此步驟所附的壓縮文件夾中包含了FIRST的一些技術和支持文檔。技術文檔更詳細地討論了各個組件,而支持文檔則描述了它們如何一起使用。我希望您發現此合并資源有幫助。
責任編輯:wv
-
機器人
+關注
關注
210文章
28212瀏覽量
206565 -
電氣系統
+關注
關注
1文章
346瀏覽量
24252
發布評論請先 登錄
相關推薦
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
協作機器人拽拖示教詳解
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
abb機器人系統如何添加選項
工業機器人電氣控制系統的體系結構主要有哪些
工業機器人控制系統的基本組成有哪些
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
SystemWeaver—電子電氣系統協同研發平臺
「喜報」邁步機器人榮獲機器人應用典型案例獎







 工商網監
工商網監
評論