") 怎樣將IR Sensor與Arduino和程序結合使用以消除噪聲
怎樣將IR Sensor與Arduino和程序結合使用以消除噪聲
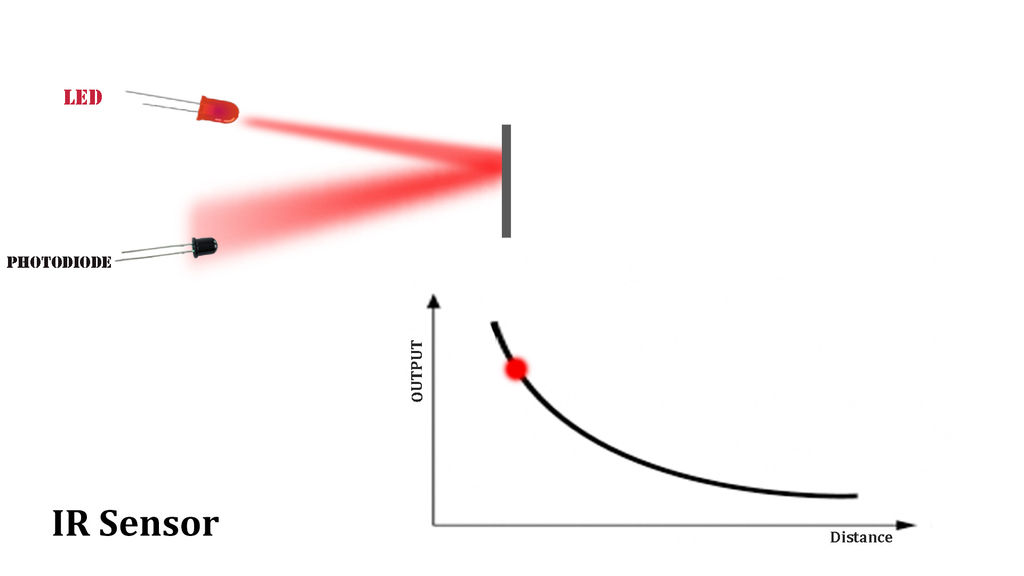
使用紅外傳感器非常容易測量距離。
光電二極管測量光的強度(這里大部分是紅外光)。紅外二極管不僅可以測量紅外光的強度,而且對可見光也很敏感。
在這里,光電二極管記錄的紅外光的強度代表目標與傳感器之間的距離。
目標越近,記錄的光強度越高,并且隨著距離的增加而降低。
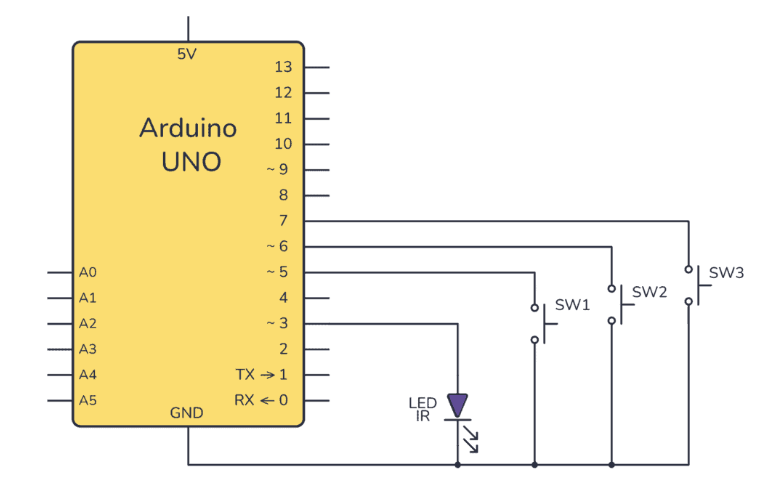
步驟2:為傳感器制造電路:
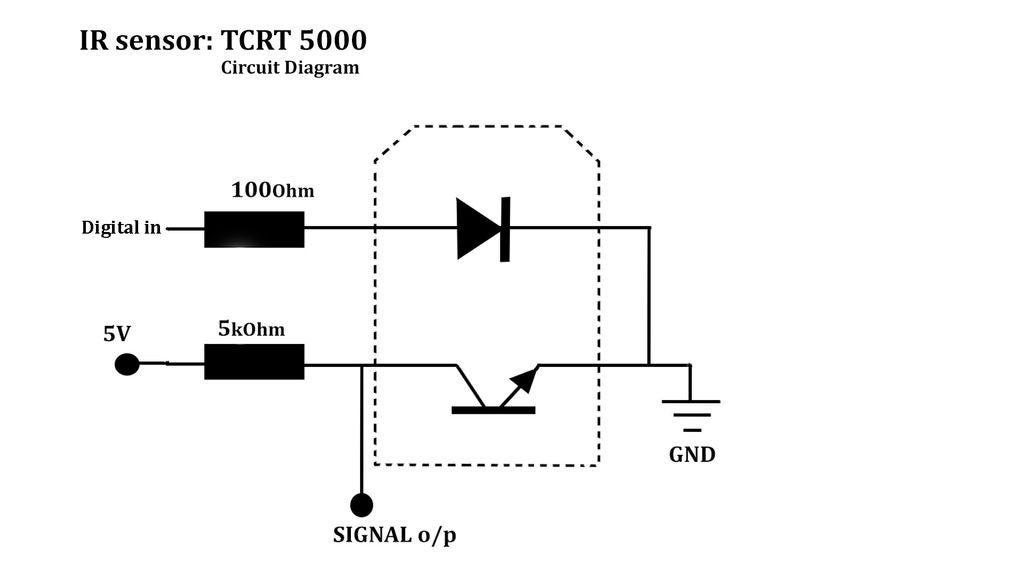
我們正在使用基本電路來驅動光電二極管。我們還可以使用基于運放的更準確,更好的方法來進行精確測量。
IR LED與Arduino的數字引腳串聯(lián)了100歐姆的電阻。然后將光電二極管連接到與5v電源串聯(lián)的5k歐姆電阻,并從信號中取出信號,該信號進入Arduino的模擬輸入引腳。
步驟3:檢查電路:
將此代碼上傳到arduino。
void setup()
{
Serial.begin(9600);
pinMode(6,OUTPUT);
}
無效循環(huán)()
{digitalWrite(6,HIGH);
delayMicroseconds(500);
Serial.println(a)的}
現(xiàn)在打開串行繪圖儀,然后將一些目標移到傳感器前面。繪圖也應根據目標位移的移動而移動。
此方法的問題:
測量對環(huán)境敏感。光線的任何變化都會破壞測量。
例如,如果我們在早上校準傳感器,則不能在晚上使用。甚至在室內,如果我們打開或關閉室內燈光,校準也會發(fā)生變化。
步驟4:噪聲和解決方案的來源:
有多種噪聲源,例如:
太陽的紅外輻射:很大一部分對地球的IR輻射。
室內照明:紅外光電二極管不僅捕獲紅外光,而且還感知到室內照明光透射的可見光。
》
熱源:所有熱源均發(fā)出某種形式的輻射,這些輻射被IR光電二極管捕獲。這些輻射的數量,因此誤差取決于身體的溫度和大小。
這些源發(fā)出的IR輻射被IR光電二極管捕獲。因此誤差被添加到我們的測量中。
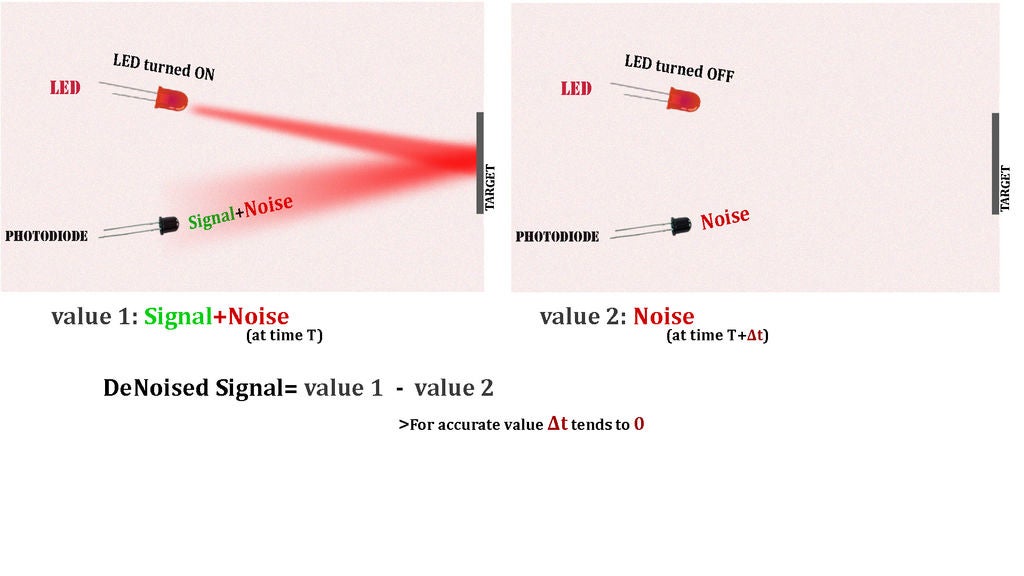
解決方案:
由于 可以顯示在第三張圖片中,
如果我們打開led比光電二極管測量噪聲+信號,如果led關閉光電二極管僅測量噪聲。
這兩個值之間的差將得到去噪數據。
如果我們非常快地讀取兩個讀數足夠的去噪效果會更好。
附加的代碼可用于從傳感器獲取純凈/去噪的數據。
步驟5:去噪和應用的測試代碼
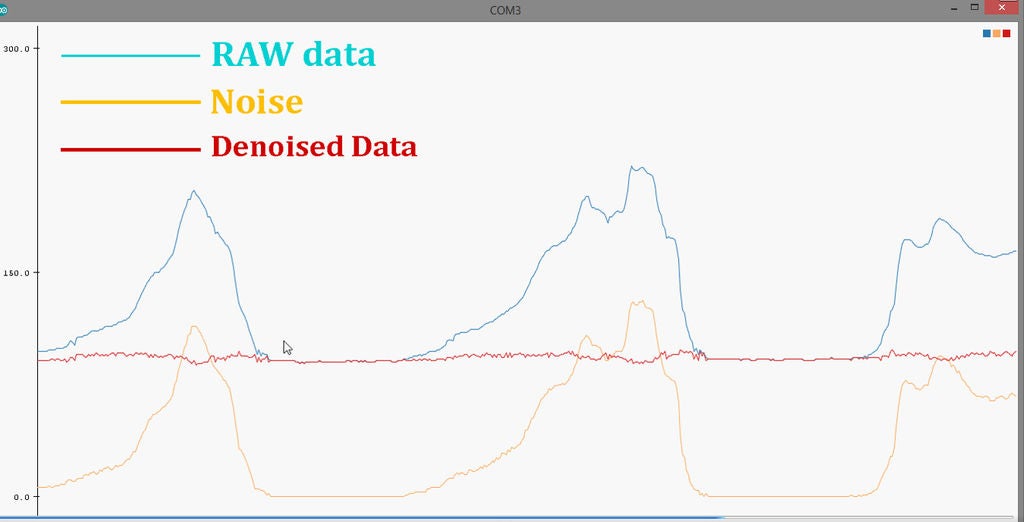
這些圖片顯示RAW數據,噪聲值和純信號。您還可以參考視頻,其中存在閃爍的光以及靜態(tài)噪聲時傳感器的輸出。
此方法可用于線路跟隨器,因此我們不需要每次都校準傳感器采用。它也可以用于某些使用紅外傳感器具有相同優(yōu)勢的機器人。
責任編輯:wv
-
Sensor
+關注
關注
0文章
134瀏覽量
49550 -
紅外傳感器
+關注
關注
9文章
514瀏覽量
47514 -
Arduino
+關注
關注
187文章
6464瀏覽量
186650
發(fā)布評論請先 登錄
相關推薦
用TMS320C31實現(xiàn)噪聲消除系統(tǒng)

TLV320AIC3106只要接了外設,就存在噪聲怎么消除?
LMK04616超低噪聲和低功耗時鐘抖動消除器數據表
OPA4388如何消除1/f噪聲?
求助,在esp-idf中使用arduino作為組件后怎樣使用arduino的庫?
UVC AN90369將sensor數據通過CX3向PC端傳輸數據遇到的疑問求解
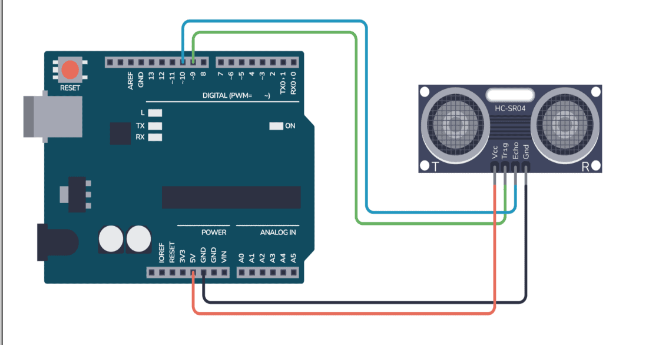
如何將HC-SR04連接到Arduino并編寫一個簡單的程序來測量距離
如何設置Arduino IR發(fā)射器電路





 工商網監(jiān)
工商網監(jiān)
評論