 英創信息技術GPRS-串口數據透明傳輸簡介
英創信息技術GPRS-串口數據透明傳輸簡介
GPRS通訊和串口通訊都是工控領域使用極為頻繁的數據傳輸方式,而實際工程中經常需要在GPRS和串口之間進行數據的透明傳輸,即:將串口終端設備傳輸過來的各種數據通過GPRS發送到另一設備,或者將GPRS終端設備傳輸過來的數據通過串口轉發。利用英利開發資料光盤中的GPRS、以太網和串口示例程序,可以很容易地開發這樣一個GPRS-串口數據透明傳輸的應用例程。
在英利開發資料光盤的“應用開發軟件”-“典型應用”中,有一個名為“gprs232”的文件夾,就是GPRS-串口數據透明傳輸的示例工程文件。該例程包括了串口、以太網和GPRS操作,以多線程方式實現,程序流程如下:
1、初始化串口并啟動串口數據處理線程
2、打開GPRS并建立連接
3、建立TCP連接,啟動網絡數據處理線程并進行數據透明傳輸
1、準備工作
在測試和使用該例程之前,需進行如下準備工作:
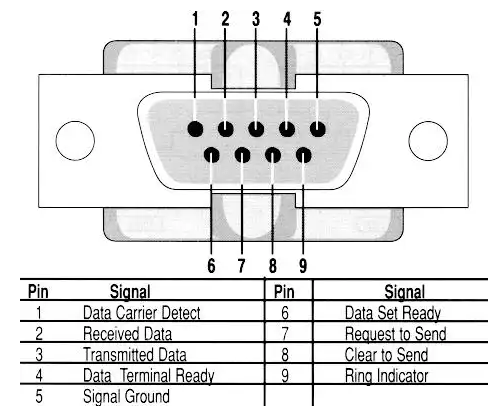
1、將英利工控主板的調試串口連接到開發主機,然后將英利工控主板的串口ttyS2(程序默認。如果使用其他串口,請參照程序代碼,在命令行帶入相關參數)與實驗用PC機的串口連接(開發主機的COM1往往和英利工控主板的調試串口連接,用于通過超級終端操作英利工控主板。因此如果開發主機還有一個完好的串口,可以將此串口連接到ttyS2;否則建議客戶另找一臺PC機連接ttyS2,以便于測試該例程。本文中的“實驗用PC機”就是指連接ttyS2的PC機)。
2、將實驗用PC機、開發主機和英利工控主板都接入實驗室內網,并確保實驗室內網和公共局域網的連接都正確無誤。
3、將ETA300與英利工控主板連接好,將實驗用SIM卡裝在ETA300上面。
4、將英利工控主板/mnt/nandflash文件夾下userinfo.txt文件中的默認網關改為0,即如下:
DefaultGateway='0'
如果不進行這個修改,則系統默認會通過以太網,而非GPRS傳輸數據。
5、通過實驗室的網關路由器,為實驗用PC機分配一個端口,并記下該網關路由器的外網IP地址。
6、將英利開發資料光盤“工具軟件”中的“串口調試助手”和文件夾“TCPTest_Linux”復制到實驗用PC機上,啟動串口調試助手和“TCPTest_Linux”中的TCPTest。TCPTest啟動以后將套接字類型選擇為服務器,服務器名稱填入實驗用PC機的內網IP地址,服務器端口填入之前為實驗用PC機分配的端口號,然后選擇偵聽,如下圖所示。
2、例程測試
以上6步準備完畢以后,在開發主機上啟動超級終端,為英利工控主板上電,啟動sourcery g++并編譯gprs232工程文件,通過超級終端將應用程序下載到英利工控主板的/mnt/nandflash文件夾中,并輸入如下命令運行程序:
[root@EM9X60 /mnt/nandflash]#./gprs232 50
由于GPRS模塊首次上電連接速度可能比較慢,因此此處設置了參數50(等待50秒。該項設置與用戶使用的SIM卡有關。如果50秒以后仍然無法連接,可以將這個時間再加長)。一旦首次連接成功以后,只要不斷開電源,再次運行該程序的時候可以不設置這個參數,直接如下運行即可:
[root@EM9X60 /mnt/nandflash]#./gprs232
此后系統自動進行初始化和連接,過程中用戶可以看到ETA300上的SYNC燈閃動,表示找到SIM卡以及連網,同時超級終端會顯示相應的運行信息。連接成功以后,超級終端最后一行信息顯示:TCP Connect Success;同時,實驗用PC機上TCP Test的消息欄也從不可編輯的灰色狀態變為可以輸入信息狀態,如下圖所示。
此后通過串口調試助手發送信息,可以看到信息顯示在TCP Test的“接收的信息”欄中,通過TCP Test發送的信息則顯示在串口調試助手的接收區中。發送/接收數據的過程中,ETA300的SYNC燈會閃動,表示數據正通過GPRS發送/接收。如果SYNC燈沒有閃動,則數據并不是通過GPRS發送/接收。此時需檢查userinfo.txt的默認網關是否配置為0。
3、程序說明
該例程的主程序參見光盤中的源文件。本例程以多線程方式實現,串口、TCP數據收發由各自獨立的線程完成,這樣不但能夠充分發揮嵌入式Linux多任務操作系統的優勢、實時處理數據,同時有利于減少系統開銷、提高系統資源利用效率。其中主程序部分需要用戶自行填寫參數的是以下兩個地方:
// 此處填寫網關路由器的外網IP地址
strcpy( ServerIP, '222.212.15.128' );
// 此處填寫通過實驗室的網關路由器為實驗用PC機分配的端口號
TCPClntManager.AddTCPClientObject( ServerIP, 7051 );
數據處理分別在串口數據處理線程ReceiveThreadFunc和TCP數據處理線程SocketThreadFunc中進行。
串口部分:
// 聲明外部變量TCPClntManager類
extern class CTCPClientManager TCPClntManager;
int CSerial::ReceiveThreadFunc(void* lparam)
{
// 得到CSerial實例指針
CSerial *pSer = (CSerial*)lparam;
.
.
.
if (ret > 0)
{
// 判斷是否讀事件
if (FD_ISSET(pSer->m_fd,&fdRead))
{
// data available, so get it!
pSer->m_DatLen = read( pSer->m_fd, pSer->DatBuf, 100 );
// 接收串口數據處理函數
if( pSer->m_DatLen > 0 )
{
pSer->PackagePro( pSer->DatBuf, pSer->m_DatLen );
}
// 處理完畢
}
}
}
// 接收串口數據處理函數
int CSerial::PackagePro( char* Buf, int len )
{
// 將接收的數據發送至TCP服務器
CTCPClient* pTCPClnt;
Buf[len] = 0;
// 檢測TCP連接是否打開
if( TCPClntManager.m_TCPClientInfo[0].ConnState == csOPEN )
{
pTCPClnt = (CTCPClient*)TCPClntManager.m_TCPClientInfo[0].pTCPClient;
// 調用CTCPClient類的發送函數將串口接收到的數據發送到TCP服務器
pTCPClnt->SendData( Buf, len );
}
return 1;
}
TCP部分:
// 聲明外部變量CSerial類
extern class CSerial m_Serial;
// TCP數據處理線程
int CTCPClient::SocketThreadFunc( void* lparam )
{
CTCPClient *pSocket;
// 得到CTCPClient實例指針
pSocket = (CTCPClient*)lparam;
.
.
.
if (ret > 0)
{
.
.
.
else
{
// 對接收的數據進行處理
pSocket->RecvBuf[pSocket->m_nRecvLen] = 0;
// printf( 'RCV:%s\n', pSocket->RecvBuf);
// 調用CSerial類的發送函數將GPRS接收到的數據發送到串口調試助手
m_Serial.WritePort( pSocket->RecvBuf, pSocket->m_nRecvLen );
// pSocket->SendData( pSocket->RecvBuf, pSocket->m_nRecvLen );
// 處理完畢
}
}
}
-
Linux
+關注
關注
87文章
11232瀏覽量
208950 -
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35225
發布評論請先 登錄
相關推薦
中科創達榮獲2024年軟件和信息技術服務優秀企業
信創國產化背景下的工控主板發展現狀
物聯網行業中透明傳輸詳解以及如何實現
加速鯤鵬落地!拓維信息信創遷移工具榮獲鯤鵬原生開發技術認證

梯度科技入選2023年信息技術應用創新解決方案名單
串口服務器是什么?4路、8路、16路串口服務器有什么區別?
GPRS抄表技術是什么?

GPRS與4G網絡:技術差異與應用選擇
GPRS與4G網絡的技術差異與應用選擇
基于物聯網、大數據、云計算等現代信息技術高速公路智慧消防平臺解決方案

什么是串口 串口傳輸和adc的關系及區別
龍芯中科三項信創方案入圍工信部2023年信息技術應用創新應用示范案例名單

什么是串口 串口無法傳輸數據的原因





 工商網監
工商網監
評論