 自動貓喂食器的制作教程
自動貓喂食器的制作教程
步驟1:材料
-Arduino 101
-超聲波傳感器HC-SR04
-電動機驅動器1A Dual TB6612FNG
-LM7806
-3D打印零件
-齒輪電動機DG01。
-通用6v直流電動機
-內置金屬框架。
-塑料容器
-硅酮膠
-電線
步驟2:直流電動機驅動器組件
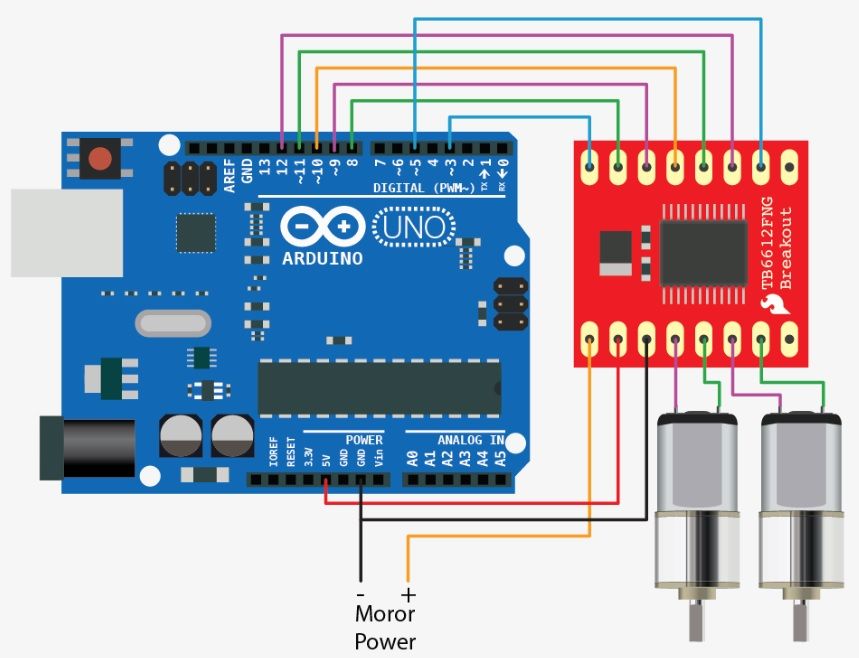
組裝板
用于整個LM7806穩壓器的Arduino 101的9V電源輸出的DB6612FNG電壓。
步驟3:超聲波距離傳感器
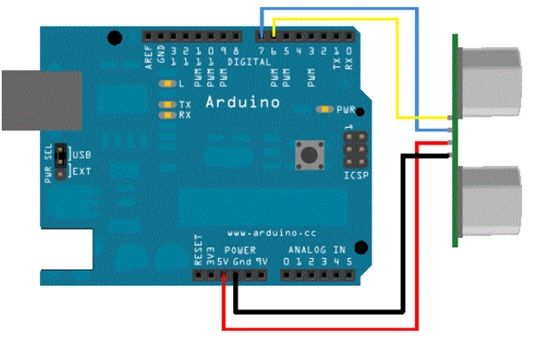
根據原理圖將HC-SR04超聲波傳感器連接到Arduino 101板
步驟4:3D打印
包括STL文件,它們被打印在沒有足夠高度的“金屬打印的Bot”機器上,需要將所有內容調整為0.93%的大小才能能夠從www.tiguiverse.com打印STL文件
步驟5:容器切割
鉆頭用于切割容器的底部。 ,任何其他方法都可以正常工作
步驟6:膠印零件和容器
使用Duretan膠將3D打印的零件連接在一起,每次連接等待一晚上
步驟7:構建框架
這是在金屬,弧焊中完成的,但木材也應該很好,
步驟8:添加了振動電機
-由于存在將食物卡入腔室的問題,因此包含了此電機。
-目前重量是用膠帶固定的螺母,需要改進它。但是可以正常工作約一個月。
-從舊的盒式錄音機中取出了6v電動機。
-從一個空的牛奶容器中切下了塑料。 》
第9步:加載草圖
共享貓的喂食草圖,可以進行更改以增加部分或減少或增加鎖定時間(2小時)以不使貓過度喂食
真相是我們的貓習慣了噪音和振動,實際上喜歡在她到達時吃新食物,因此消除了10分鐘的延遲。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
喂食器
+關注
關注
1文章
23瀏覽量
3054
發布評論請先 登錄
相關推薦
光纖頭接光貓要用轉接盒嗎?
光纖頭接光貓是否需要轉接盒,主要取決于光纖和光貓的接口類型以及具體的網絡配置需求。 一般來說,如果光纖和光貓的接口類型相匹配,且網絡環境簡單,那么可能不需要轉接盒。例如,如果光纖使用的是SC、LC或
光纜怎么接光貓
光纜接光貓的過程相對簡單,但需要注意一些細節以確保連接穩定可靠。以下是光纜接光貓的詳細步驟: 一、準備工具和材料 光纜:確保光纜的末端已經進行了熔接或機械連接,以便光信號能夠傳輸。 光貓(ONT
寵物自動喂食器主控芯片DSH3186
寵物在現代人的生活中占有極大的比重,甚至愿意將寵物當做孩子精細地養活。也正因為如此,由寵物而衍生出來的產業鏈涉及方方面面,不但解決了寵物主人的煩惱,也給寵物們帶來更為幸福的生活。其中,寵物自動喂食器
AIGC在視頻內容制作中的應用前景
AIGC技術能夠顯著縮短視頻內容的制作周期。通過AI算法,可以快速生成視頻剪輯、特效、字幕和配樂等,減少人工操作的時間。例如,在短視頻制作中,AIGC技術可以自動找到最佳剪輯點、裁剪視頻片段,甚至根據視頻內容
NVF04M錄音芯片在寵物喂食器的應用:錄音播放功能,內置SPI閃存
在現代社會中,寵物已經成為人們生活中的一部分,而寵物喂食器作為寵物養護的重要工具,也越來越受到人們的關注。為了滿足人們對寵物喂食器的多樣化需求,九芯電子供應商研發了一款NVF04M錄音芯片。它在寵物

僅靠光貓上網多年后出現網絡故障后解決方法是需要加路由器嗎?
了10086。描述問題掛機后,移動發了各種進度短信。等待近40分鐘,終于有個移動小哥給我打電話。了解了各種問題后,他判斷結果是:我家無線網絡從安裝到現在都僅有一個光貓,沒有路由器,時間用久了就會間歇性斷網
發表于 06-25 20:55
ESP32S2 UDP經過電信WIFI光貓沒有任何數據返回是怎么回事?
正在利用ESP32S2開發VOIP話機
經過測試 UDP經過電信WIFI光貓沒有任何數據返回,但是經過筆記本WIFI AP轉LAN經過光貓有線口是可以出去。
這個是光貓問題還是,ESP32庫問題?
發表于 06-14 06:48
光纖如何接入光貓接頭
光纖接入光貓接頭是一個相對復雜的過程,通常涉及幾個關鍵步驟。下面是一個基本的指南,幫助您完成光纖到光貓接頭的連接: 準備工具和材料:在開始之前,您需要確保擁有正確的工具和材料,包括光纖剝線鉗、清潔布
如何用Arduino制作一個簡易自動喂魚器
如果你家里養有魚,并想找到一種自動化喂食的方法,這個項目可能會對你有所啟發。
在這個教程中,作者將展示如何制作自己的基于Arduino的自動喂魚器,讓小魚不在餓肚子。
發表于 03-28 11:25
基于WTR096-28SS芯片方案的寵物喂食器實現智能化喂食功能
功能,可以根據主人設定的時間和食物量,自動為寵物提供食物,確保寵物按時獲得充足的飲食。同時,該喂食器還支持多餐分配,可以設定多個餐次,根據寵物的飲食需求進行合理分配,保證寵物的飲食均衡。 二、方案分析 市面上常用的寵物喂食器方
求一種基于WTR096-28SS芯片方案的寵物喂食器設計方案
本方案寵物喂食器采用了WTR096-28SS芯片方案來實現智能化的喂食功能。該方案結合了先進的技術和設計理念,提供了便捷、智能和個性化的寵物喂食解決方案。
湯姆貓正在推進申請接入OpenAI的Sora模型
湯姆貓在互動平臺上透露,公司正在積極推進申請接入OpenAI的Sora模型,并計劃進行相關素材制作的測試。目前,湯姆貓尚未正式接入Sora模型。
電信光纖貓怎么設置上網 電信光纖貓和聯通光纖貓能通用嗎?
光纖貓是一種專門用于接入光纖網絡,并提供網絡連接的設備。對于許多家庭用戶來說,電信和聯通是兩個主要的光纖網絡服務提供商。但是,電信光纖貓和聯通光纖貓在一些方面是不同的,不能直接通用。 首先,光纖
WT588F02A-16S錄音語音芯片在寵物喂食器中的應用:小芯片,大功能
在現代社會中,寵物已經成為人們生活中的一部分,而寵物喂食器作為寵物養護的重要工具,也越來越受到人們的關注。為了滿足人們對寵物喂食器的多樣化需求,唯創知音的WT588F02A-16S錄音芯片在其中發揮著重要作用。
WT588F02A-16S錄音語音芯片IC在寵物喂食器中的應用:小芯片,大功能
在現代社會中,寵物已經成為人們生活中的一部分,而寵物喂食器作為寵物養護的重要工具,也越來越受到人們的關注。為了滿足人們對寵物喂食器的多樣化需求,唯創知音的WT588F02A-16S錄音芯片






 工商網監
工商網監
評論