 Firefly-RK3128主板PWM輸出介紹
Firefly-RK3128主板PWM輸出介紹
PWM 使用
前言
Firefly-RK3128 開發板上有 4 路 PWM 輸出,分別為 PWM0 ~ PWM3,其中:
- PWM0/GPIO0_D2: 在擴展口中引出
- PWM1/GPIO0_D3: 內部用作 AUX_DET 信號
- PWM2/GPIO0_D4: 內部用作 RTC_INT 信號
本章主要描述如何配置 PWM。 Firefly-RK3128 的 PWM 驅動為:
kernel/drivers/pwm/pwm-rockchip.c
配置步驟
配置 PWM 主要有以下三大步驟:配置 PWM DTS 節點、配置 PWM 內核驅動、控制 PWM 設備。
配置 PWM DTS節點
在 kernel/arch/arm/boot/dts/rk312x.dtsi 定義了以下 PWM 節點,如下所示:
pwm0: pwm@20050000 {compatible = "rockchip,rk-pwm";reg = <0x20050000 0x10>;#pwm-cells = <2>;pinctrl-names = "default";pinctrl-0 = <&pwm0_pin>;clocks = <&clk_gates7 10>;clock-names = "pclk_pwm";status = "disabled";}; pwm1: pwm@20050010 {compatible = "rockchip,rk-pwm";reg = <0x20050010 0x10>;#pwm-cells = <2>;pinctrl-names = "default";pinctrl-0 = <&pwm1_pin>;clocks = <&clk_gates7 10>;clock-names = "pclk_pwm";status = "disabled";}; pwm2: pwm@20050020 {compatible = "rockchip,rk-pwm";reg = <0x20050020 0x10>;#pwm-cells = <2>;pinctrl-names = "default";pinctrl-0 = <&pwm2_pin>;clocks = <&clk_gates7 10>;clock-names = "pclk_pwm";status = "disabled";}; pwm3: pwm@20050030 {compatible = "rockchip,rk-pwm";reg = <0x20050030 0x10>;#pwm-cells = <2>;pinctrl-names = "default";pinctrl-0 = <&pwm3_pin>;clocks = <&clk_gates7 10>;clock-names = "pclk_pwm";status = "disabled";}; remotectl: pwm@20050030 {compatible = "rockchip,remotectl-pwm";reg = <0x20050030 0x10>;#pwm-cells = <2>;pinctrl-names = "default";pinctrl-0 = <&pwm3_pin>;clocks = <&clk_gates7 10>;clock-names = "pclk_pwm";remote_pwm_id = <3>;interrupts = ;status = "okay";}; 要使用 pwm0, 只需在 kernel/arch/arm/boot/dts/rk3128-fireprime.dts 加入:
&pwm0 { status = "okay"; };
配置 PWM 內核驅動
PWM 驅動位于文件 kernel/drivers/pwm/pwm-rockchip.c。
控制 PWM 設備
用戶可在其它驅動文件中使用以上步驟生成的 PWM 節點。具體方法如下:
在要使用 PWM 控制的設備驅動文件中包含以下頭文件:
#include 該頭文件主要包含 PWM 的函數接口。
申請 PWM
使用
struct pwm_device *pwm_request(int pwm_id, const char *label); 函數申請 PWM。例如:
struct pwm_device * pwm0 = NULL;pwm0 = pwm_request(0, “backlight-pwm”);
配置 PWM
使用
int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns); 配置 PWM 的占空比,例如:
pwm_config(pwm0, 500000, 1000000); 參數 pwm 為前一步驟申請的 pwm_device。duty_ns 為占空比激活的時長,單位為 ns。period_ns 為 PWM 周期,單位為 ns。
使能PWM
函數
int pwm_enable(struct pwm_device *pwm); 用于使能 PWM,例如:
pwm_enable(pwm0); 參數 pwm 為要使能的 pwm_device。
控制 PWM 輸出主要使用以下接口函數:
struct pwm_device *pwm_request(int pwm_id, const char *label); - 功能:用于申請 pwm
-
參數:
- pwm_id:要申請的 pwm 通道。
- label: 為該申請的 pwm 所取的標簽。
void pwm_free(struct pwm_device *pwm); - 功能:用于釋放所申請的 pwm
-
參數:
- pwm:所要釋放的 pwm 結構體
int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns); - 功能:用于配置 pwm 的占空比
-
參數:
- pwm: 所要配置的 pwm
- duty_ns:pwm 的占空比激活的時長,單位 ns
- period_ns:pwm 占空比周期,單位 ns
int pwm_enable(struct pwm_device *pwm); - 功能:使能 pwm
-
參數:
- pwm:要使能的 pwm
void pwm_disable(struct pwm_device *pwm); - 功能:禁止 pwm
-
參數:
- pwm:要禁止的 pwm
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Linux
+關注
關注
87文章
11232瀏覽量
208949 -
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35225 -
Firefly
+關注
關注
2文章
538瀏覽量
6992
發布評論請先 登錄
相關推薦
Firefly-RK3128開發板上手教程(上)
1、Firefly-RK3128開發板入手指南配件Firefly-RK3128 的標準套裝包含以下配件:Core-3128J 核心板一塊Firefly-RK3128 基板一塊WiFi
發表于 08-12 17:32
Firefly-RK3128開發板上手教程(下)
1、如何將主機上的固件文件通過雙公頭USB數據線燒錄到開發板的閃存中準備工作Firefly-RK3128 開發板固件主機良好的 Micro USB OTG 線固件文件一般有兩種:單個統一固件
發表于 08-12 17:51
Firefly-RK3128 MIPI DSI使用步驟說明
screen-type屬性:顯示屏類型,Firefly-RK3128只支持單通道MIPI屏,配置成SCREEN_MIPI即可。lvds-format屬性:無關選項。out-face屬性:配置顏色,可為OUT_P888
發表于 08-22 17:12
firefly RK3128開發板介紹
Firefly-RK3128 采用Cortex-A7架構四核1.3GHz處理器,集成Mali-400MP2 GPU, 擁有優秀的運算與圖形處理能力;板載千兆以太網口、2.4GHz Wi-Fi和藍牙4.0

Firefly-RK3288PWM輸出介紹
Firefly-RK3288 開發板上有 4 路 PWM 輸出,分別為 PWM0 ~ PWM3, 本章主要描述如何配置
Firefly-RK3128開發板UART接口介紹
refly-RK3128 開發板內置 3 路 UART,分別為 uart0,uart1,uart2。uart0 用于藍牙數據傳輸,如果要使用 uart0,必須關掉藍牙,才可以使用擴展槽上的 UART0 針腳。
Firefly-RK3128主板I2C控制器
Firefly-RK3128 開發板上有 4 個片上 I2C 控制器。本文主要描述如何在該開發板上配置 I2C。
Firefly-RK3128主板ADC簡介
Firefly-RK3128 開發板有一個 3 通道(0/1/2)、10 比特精度的 SAR ADC (Successive Approximation Register,逐次逼近寄存器),
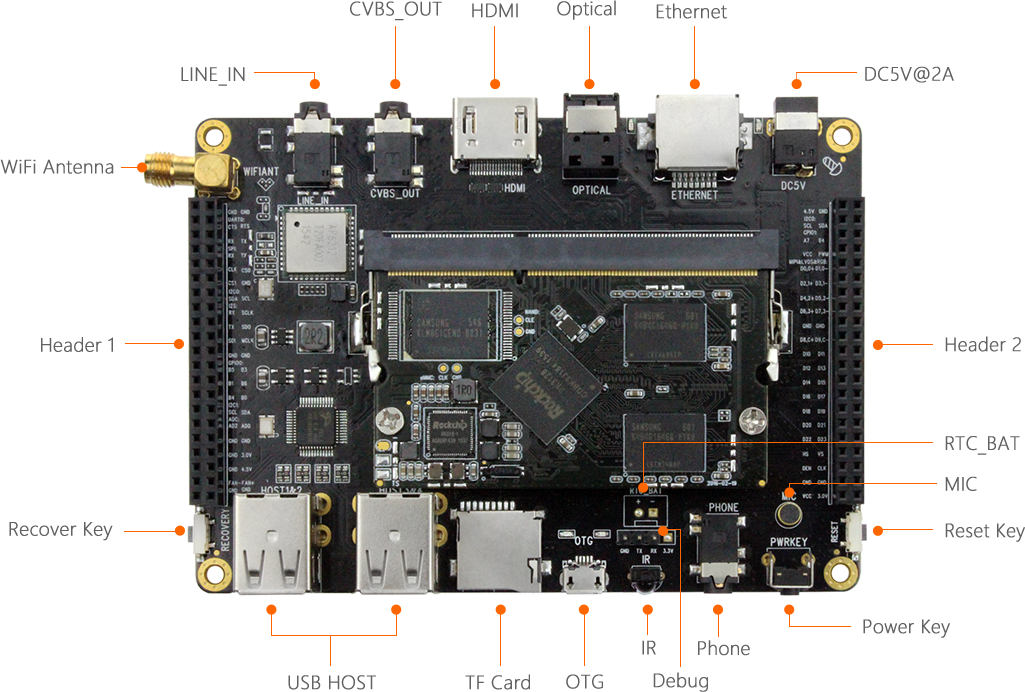
Firefly-RK3128主板接口定義介紹
Firefly-RK3128 開發板提供了豐富的接口,主要包括:HDMI、音頻數字光纖、以太網、電源接口、復位按鍵、電源鍵、音頻輸入輸出、硅麥、串口調試接口、紅外接收、OTG接口、TF卡槽、USB Host1~4、





 工商網監
工商網監
評論