 fireflyAIO-3288C主板SPI接口簡介
fireflyAIO-3288C主板SPI接口簡介
SPI是一種高速的,全雙工,同步串行通信接口,用于連接微控制器、傳感器、存儲設備等,本文以指紋識別模塊為例簡單介紹SPI使用。
SPI以主從方式工作,這種模式通常有一個主設備和一個或多個從設備,需要至少4根線,分別是:
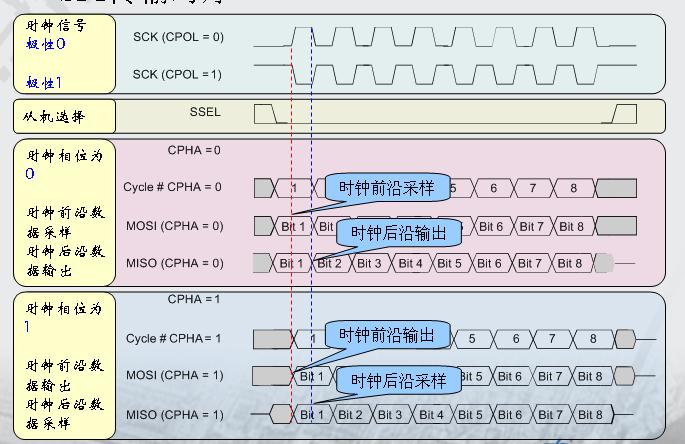
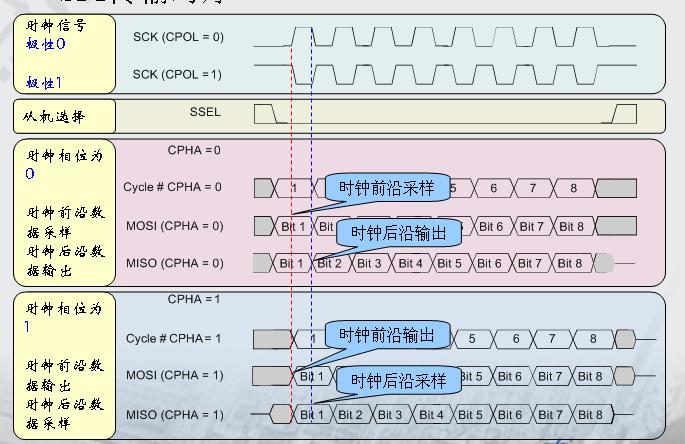
Linux內核用CPOL和CPHA的組合來表示當前SPI的四種工作模式:
CPOL=0,CPHA=0 SPI_MODE_0 CPOL=0,CPHA=1 SPI_MODE_1 CPOL=1,CPHA=0 SPI_MODE_2 CPOL=1,CPHA=1 SPI_MODE_3 CPOL:表示時鐘信號的初始電平的狀態,0為低電平,1為高電平。CPHA:表示在哪個時鐘沿采樣,0為第一個時鐘沿采樣,1為第二個時鐘沿采樣。SPI的四種工作模式波形圖如下:
在內核源碼目錄kernel/drivers/spi/中創建新的驅動文件,如:spi-rockchip-firefly.c 在驅動文件所在目錄下的Kconfig文件添加對應的驅動文件配置,如:
在驅動文件所在目錄下的Makefile文件添加對應的驅動文件名,如:
+obj-$(CONFIG_SPI_ROCKCHIP_FIREFLY) += spi-rockchip-firefly.o 用make menuconfig在內核選項中選中所添加的驅動文件,如:
There is no help available for this option. │ Symbol: SPI_ROCKCHIP_FIREFLY [=y] │ Type : boolean │ Prompt: ROCKCHIP spi firefly code │ Location: │ -> Device Drivers │ -> SPI support (SPI [=y]) │ -> ROCKCHIP SPI controller core support (SPI_ROCKCHIP_CORE [=y]) │ -> ROCKCHIP SPI interface driver (SPI_ROCKCHIP [=y]) │ Defined at drivers/spi/Kconfig:528 │ Depends on: SPI [=y] && SPI_MASTER [=y] && SPI_ROCKCHIP [=y] 在DTS中添加SPI驅動結點描述,如下所示: kernel/arch/arm/boot/dts/firefly-rk3288-aio-3288c.dts
&spi0 { status = "okay"; max-freq = <24000000>; spidev@00 { compatible = "rockchip,spi_firefly"; reg = <0x00>; spi-max-frequency = <14000000>; spi-cpha = <1>; //spi-cpol = <1>; }; }; - status:如果要啟用SPI,則設為okay,如不啟用,設為disable。
- spidev@00:由于本例子使用的是SPI0,且使用CS0,故此處設為00,如果使用CS1,則設為01。
- compatible:這里的屬性必須與驅動中的結構體of_device_id 中的成員compatible 保持一致。
- reg:此處與spidev@00保持一致,本例設為:0x00;
- spi-max-frequency:此處設置spi使用的最高頻率。
- spi-cpha,spi-cpol:SPI的工作模式在此設置,本例所用的模塊SPI工作模式為SPI_MODE_1,故設:spi-cpha = <1>,如果您所用設備工作模式為SPI_MODE0,則需在此把這兩個注釋掉,如果用SPI_MODE3,則設:spi-cpha = <1>;spi-cpol = <1>。
在定義 SPI 驅動之前,用戶首先要定義變量 of_device_id 。 of_device_id 用于在驅動中調用dts文件中定義的設備信息,其定義如下所示:
static const struct of_device_id spidev_dt_ids[] = { { .compatible = "rockchip,spi_firefly" }, {}, }; 此處的compatible與DTS文件中的保持一致。 定義spi_driver如下所示:
static struct spi_driver spidev_spi_driver = { .driver = { .name = "silead_fp", .owner = THIS_MODULE, .of_match_table = of_match_ptr(spidev_dt_ids), }, .probe = spi_gsl_probe, .remove = spi_gsl_remove, }; 在初始化函數static int __init spidev_init(void)中創建一個字符設備:
alloc_chrdev_region(&devno, 0,255, "sileadfp"); 向內核添加該設備:
spidev_major = MAJOR(devno); cdev_init(&spicdev, &spidev_fops); spicdev.owner = THIS_MODULE; status = cdev_add(&spicdev,MKDEV(spidev_major, 0),N_SPI_MINORS); 創建設備類:
class_create(THIS_MODULE, "spidev"); 向內核注冊SPI驅動:
spi_register_driver(&spidev_spi_driver); 如果內核啟動時匹配成功,則調用該驅動的probe函數。 probe函數如下所示:
static int spi_gsl_probe(struct spi_device *spi) { struct spidev_data *spidev; int status; unsigned long minor; struct gsl_fp_data *fp_data; printk("===============spi_gsl_probe ==============\n"); if(!spi) return -ENOMEM; /* Allocate driver data */ spidev = kzalloc(sizeof(*spidev), GFP_KERNEL); if (!spidev) return -ENOMEM; /* Initialize the driver data */ spidev->spi = spi; spin_lock_init(&spidev->spi_lock);//初始化自旋鎖 mutex_init(&spidev->buf_lock);//初始化互斥鎖 INIT_LIST_HEAD(&spidev->device_entry);//初始化設備鏈表 //init fp_data fp_data = kzalloc(sizeof(struct gsl_fp_data), GFP_KERNEL); if(fp_data == NULL){ status = -ENOMEM; return status; } //set fp_data struct value fp_data->spidev = spidev; mutex_lock(&device_list_lock);//上互斥鎖 minor = find_first_zero_bit(minors, N_SPI_MINORS);//在內存區中查找第一個值為0的位 if (minor < N_SPI_MINORS) { struct device *dev; spidev->devt = MKDEV(spidev_major, minor); dev = device_create(spidev_class, &spi->dev, spidev->devt, spidev, "silead_fp_dev");創建/dev/下設備結點 status = IS_ERR(dev) ? PTR_ERR(dev) : 0; } else { dev_dbg(&spi->dev, "no minor number available!\n"); status = -ENODEV; } if (status == 0) { set_bit(minor, minors); list_add(&spidev->device_entry, &device_list);//添加進設備鏈表 } mutex_unlock(&device_list_lock);//解互斥鎖 if (status == 0) spi_set_drvdata(spi, spidev); else kfree(spidev); printk("%s:name=%s,bus_num=%d,cs=%d,mode=%d,speed=%d\n",__func__,spi->modalias, spi->master->bus_num, spi->chip_select, spi->mode, spi->max_speed_hz);//打印SPI信息 return status; } 如果注冊SPI驅動成功,你可以在/dev/目錄下面看你到注冊的驅動名稱,可以在sys/class/下面看到你注冊的驅動設備類。
static ssize_t spidev_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) { struct spidev_data *spidev; ssize_t status = 0; unsigned long missing; if (count > bufsiz) return -EMSGSIZE; spidev = filp->private_data; mutex_lock(&spidev->buf_lock); missing = copy_from_user(spidev->buffer, buf, count);//把數據從用戶空間傳到內核空間 if (missing == 0) { status = spidev_sync_write(spidev, count);//調用寫同步函數 } else status = -EFAULT; mutex_unlock(&spidev->buf_lock); return status; } 寫同步函數:
spidev_sync_write(struct spidev_data *spidev, size_t len) { struct spi_transfer t = { .tx_buf = spidev->buffer,//發送緩沖區 .len = len,//發送數據長度 }; struct spi_message m; spi_message_init(&m);//初始化spi_message spi_message_add_tail(&t, &m);//將新的spi_transfer添加到spi_message隊列尾部 return spidev_sync(spidev, &m);//同步讀寫 } 在本例所用的模塊中,讀數據的過程為:
- 主機向模塊寫寄存器的地址及讀的指令(如:地址為0xf0,讀指令為0x00)
- 模塊收到讀的指令后,數據以頁的形式發送
- 主機設置讀的模式
- 主機讀取一頁數據并存儲
static ssize_t spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos) { struct spidev_data *spidev; int status = 0; int i = 0; spidev = filp->private_data; mutex_lock(&spidev->buf_lock); gsl_fp_write(spidev, 0x00, 0xf0);//讀之前先向模塊寫讀的指令及寄存器地址 while(1){ for(i=0;i <= 110*118/128/read_pages;i++){ status = gsl_fp_getOneFrame(spidev,0x00);//讀1頁數據 } pos = 0; break; } if(status > 0){ printk("gsl read data success!!!\n"); }else{ printk("gsl read data failed!!!"); } mutex_unlock(&spidev->buf_lock); return status; } static inline unsigned int gsl_fp_getOneFrame(struct spidev_data *spidev,unsigned char reg_8b) { int status,i; unsigned char buf_d[128*1+3] = {0x00,0x00}; struct spi_transfer t; t.tx_buf = buf_d; t.rx_buf = buf_d; t.len = 131; status = gsl_spidev_sync_read(spidev, &t); if (status > 0){ for(i=0;i<128*read_pages;i++) kmalloc_area[pos++] = buf_d[i+3]; } return status; } static inline ssize_t gsl_spidev_sync_read(struct spidev_data *spidev,struct spi_transfer *t) { struct spi_message m; spi_message_init(&m); t->bits_per_word = 8;//每次讀的數據長度為8位 t->delay_usecs = 1;//每次讀完延時 t->speed_hz = 14*1000*1000;//讀的速率 t->cs_change = 1;//CS引腳電平變化 spi_message_add_tail(t, &m); return spidev_sync(spidev, &m); } 注:Firefly的SPI驅動是Linux下通用的驅動,可以參考源碼:kernel/drivers/spi/spidev.c
-
Linux
+關注
關注
87文章
11123瀏覽量
207921 -
嵌入式主板
+關注
關注
7文章
6081瀏覽量
34942 -
Firefly
+關注
關注
2文章
538瀏覽量
6932
發布評論請先 登錄
相關推薦

fireflyAIO-3288C PWM 輸出介紹
fireflyAIO-3288C主板MIPI CSI攝像頭接口簡介
fireflyAIO-3288C主板ADC接口介紹
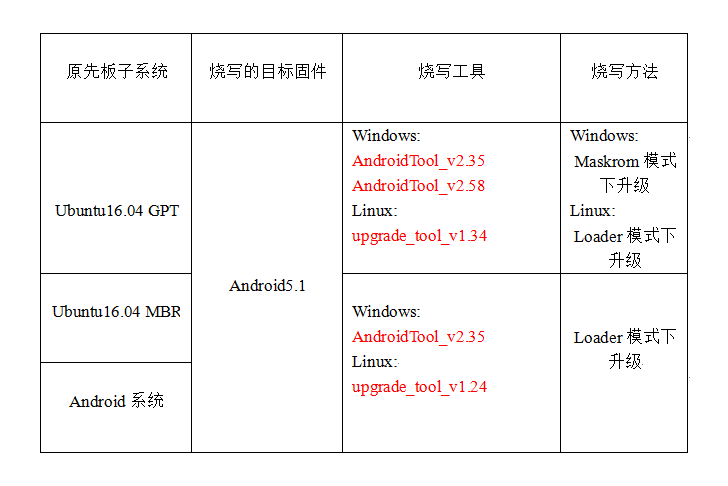
fireflyAIO-3288C主板升級統一固件簡介
fireflyAIO-3288J主板UART使用簡介
fireflyAIO-3288J主板SPI使用介紹





 工商網監
工商網監
評論