") 微雪電子測(cè)距傳感器VL53L0X測(cè)距模塊簡介
微雪電子測(cè)距傳感器VL53L0X測(cè)距模塊簡介
VL53L0X 飛行時(shí)間 測(cè)距傳感器模塊 2米 I2C接口
測(cè)距頻率可達(dá)50Hz,低功耗,抗干擾
型號(hào) VL53L0X Distance Sensor
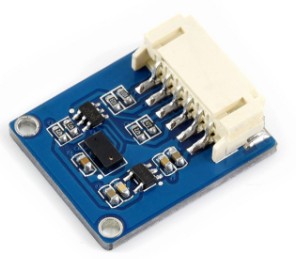

VL53L0X飛行時(shí)間(ToF)測(cè)距傳感器
產(chǎn)品簡介
【一句話自我介紹】
我是基于VL53L0X設(shè)計(jì)的飛行時(shí)間(ToF)測(cè)距模塊,精確測(cè)距范圍可達(dá)2米,I2C接口通信,低功耗。
VL53L0X是ST推出的第二代FlightSense技術(shù)的飛行時(shí)間傳感器,與傳統(tǒng)的測(cè)距傳感器不同,VL53L0X采用ST的ToF技術(shù),無論目標(biāo)顏色和反射率如何,都可以進(jìn)行距離測(cè)量,抗干擾能力更強(qiáng)。
【我的特點(diǎn)】
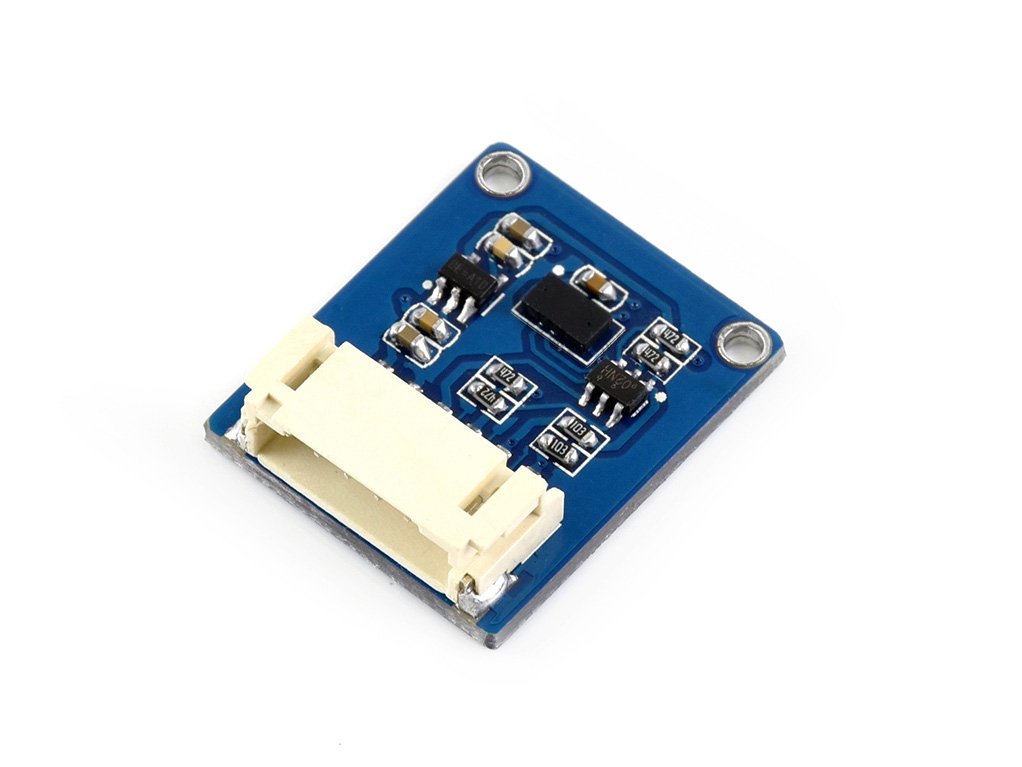
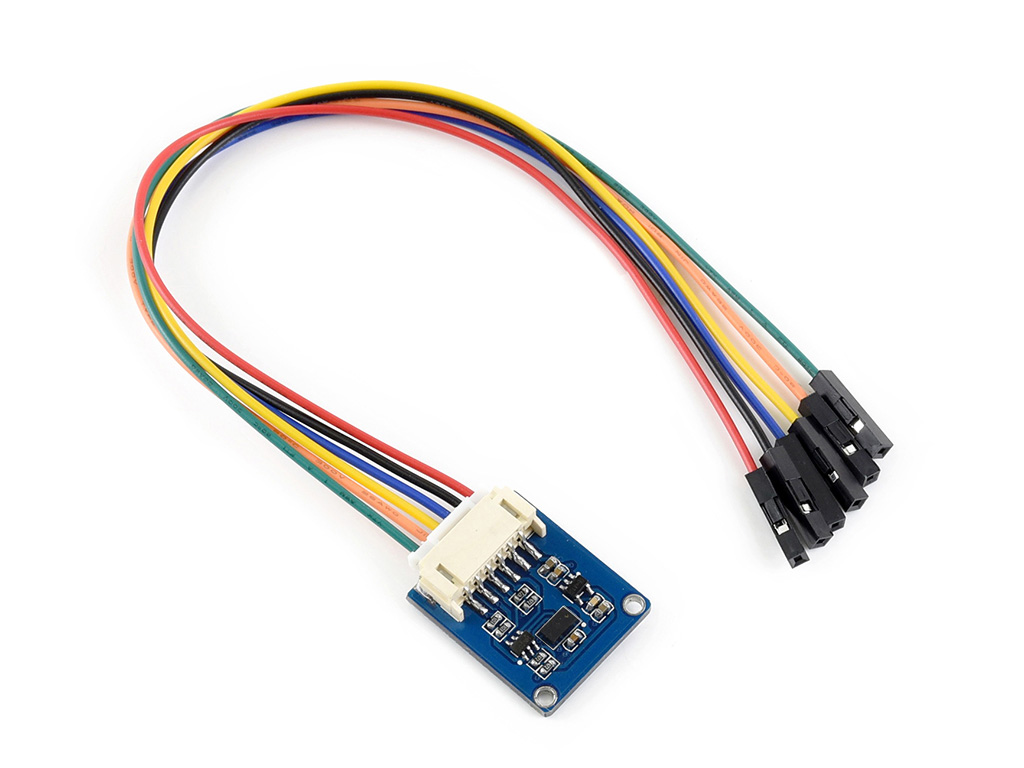
支持I2C接口通信,可通過IO口控制模塊開關(guān)
板載電平轉(zhuǎn)換電路,可兼容3.3V/5V的工作電平
提供完善的配套資料手冊(cè)(Raspberry/Arduino/STM32示例程序和用戶手冊(cè)等)
【我的參數(shù)】
工作電壓:3.3V/5V
產(chǎn)品尺寸:20mm × 24mm
通孔尺寸:2.0mm
測(cè)距范圍:30 ~ 2000mm
測(cè)距精度:±5% (高速模式),±3% (高精度模式)
測(cè)距時(shí)間(min):20ms (高速模式),200ms(高精度模式)
測(cè)距角度:25°
激光波長:940nm
工作溫度:-20 ~ 70°C
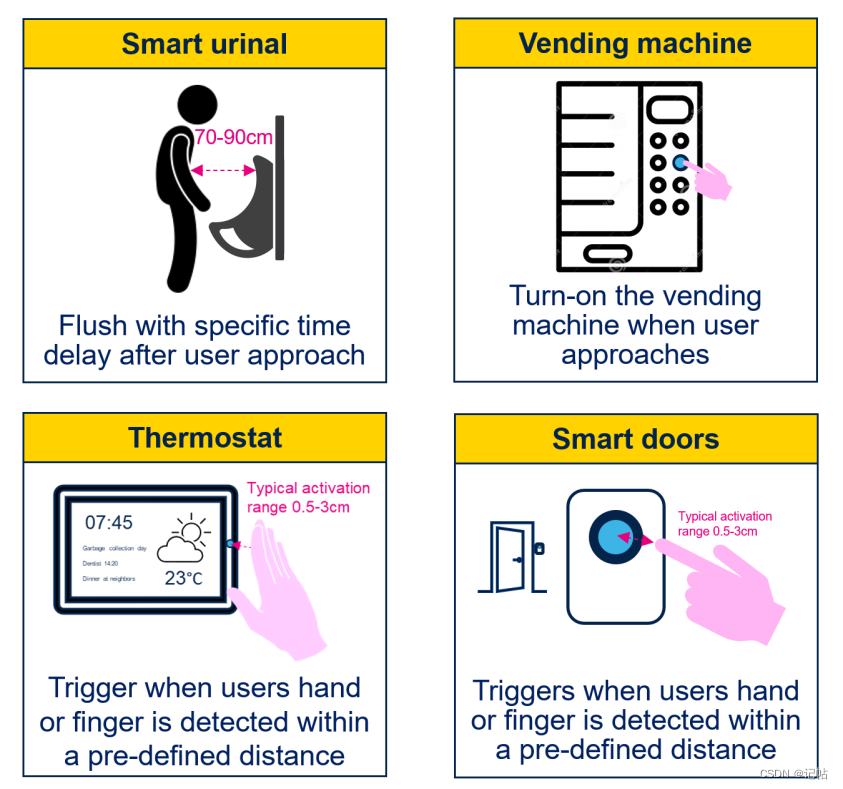
【我的用途】
移動(dòng)機(jī)器人(快速測(cè)距和障礙物檢測(cè)、巡墻行走)
用戶檢測(cè)(個(gè)人電腦/筆記本等設(shè)備用戶檢測(cè)喚醒、開關(guān)機(jī))
機(jī)器人(障礙物檢測(cè))
1D手勢(shì)識(shí)別
相機(jī)(低光自動(dòng)對(duì)焦輔助、視頻焦點(diǎn)追蹤幫助)
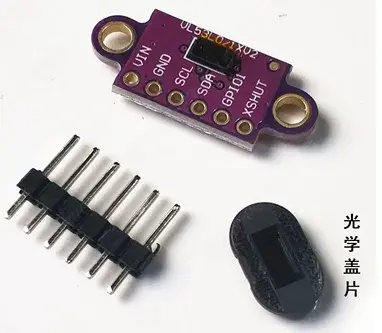
【接口說明】
VCC:電源正(3.3V/5V電源輸入)
GND:電源地
SDA:I2C的數(shù)據(jù)引腳
SCL:I2C的時(shí)鐘引腳
SHUT:開關(guān)控制引腳,可接IO口
INT:中斷輸出引腳,可接IO口
產(chǎn)品圖片



-
嵌入式主板
+關(guān)注
關(guān)注
7文章
6085瀏覽量
35218 -
微雪電子
+關(guān)注
關(guān)注
9文章
873瀏覽量
6612
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
CW32模塊使用 VL53L0X激光測(cè)距傳感器
VL53L4CD液位監(jiān)測(cè)(1)----驅(qū)動(dòng)TOF進(jìn)行測(cè)距
基于XIAO的迷你激光數(shù)顯測(cè)距儀設(shè)計(jì)

VL53L1CB TOF開發(fā)(1)----驅(qū)動(dòng)TOF進(jìn)行測(cè)距

激光測(cè)距傳感器輸出什么信號(hào)
VL53L4CX TOF開發(fā)(2)----修改測(cè)距范圍及測(cè)量頻率
VL53L8CX TOF開發(fā)(1)----驅(qū)動(dòng)TOF進(jìn)行區(qū)域檢測(cè)
VL53L4CD TOF開發(fā)(1)----驅(qū)動(dòng)TOF進(jìn)行測(cè)距
VL53L0X TOF測(cè)距傳感器的報(bào)錯(cuò)幾個(gè)疑問求解
激光測(cè)距傳感器的原理和應(yīng)用實(shí)例
意法半導(dǎo)體推出新一代8 x 8多區(qū)飛行時(shí)間測(cè)距傳感器VL53L8CX

VL53L5CX驅(qū)動(dòng)開發(fā)(1)----驅(qū)動(dòng)TOF進(jìn)行區(qū)域檢測(cè)
基于STM32CUBEMX驅(qū)動(dòng)TOF模塊VL53l0x(3)----驅(qū)動(dòng)多個(gè)VL53L0X
基于STM32CUBEMX驅(qū)動(dòng)TOF模塊VL53l0x(2)----修改設(shè)備地址
基于STM32CUBEMX驅(qū)動(dòng)TOF模塊VL53l0x(1)----單模塊距離獲取的最佳實(shí)踐





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論