 dfrobot切諾基4WD移動機器人套件簡介
dfrobot切諾基4WD移動機器人套件簡介





產品描述
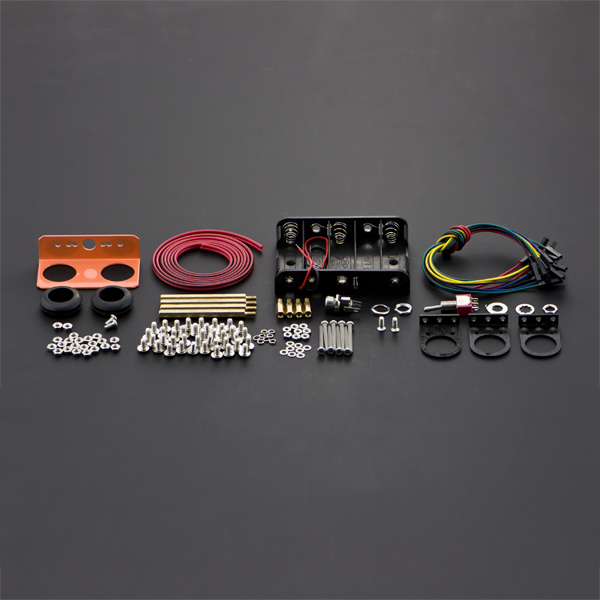
看過炫酷的切諾基4驅小車平臺,是不是想嘗試打造屬于自己的機器人小車呢?現在DFRobot就為你準備了這款完備的基礎套件。通過在切諾基上添加Romeo多合一主控器、超聲波避障傳感器和電源,然后燒錄簡單的程序,小車就可以實現自動避障的功能啦。搭配詳細的教程,你完全不用擔心學習的問題。
它不僅僅是一款有趣的小車,在組裝、調試的過程中,你可以學習機械、電子、編程和智能算法等“高科技”。你會了解到原來科技和智能就在我們身邊,你也可以學習和掌握它。
主控器采用新版的Bluno Romeo,集成了Arduino UNO R3、電機驅動、IO傳感器擴展板和藍牙4.0通訊模塊,具備機器人的所有基本功能。因此玩家可以在上面添加各種傳感器,從而具備更多學習潛力。
功能模式:
超聲波掃描避障
選用Romeo Bluno藍牙,(可結合藍牙手柄,無線遙控)
注意事項:本套件以散件的形式提供,需要自行組裝,相關文檔中全面的組裝和調試教程,以供參考。
技術規格
控制板: Bluno Romeo
微處理器: ATmega328P
板載類型: Arduino UNO
控制器工作電壓: USB供電5V或者外部7~12V DC輸入
超聲波可測范圍:4~500cm (分辨率為1cm)
舵機旋轉角度量程:180°
組裝后尺寸: 220mm*175mm*170mm
整機重量: 772g(不含電池)
最大載重: 500g
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35211 -
DFRobot
+關注
關注
4文章
1156瀏覽量
9446
發布評論請先 登錄
相關推薦
資料:移動機器人能否自動充電?
、餐飲服務行業已經應用到了機器人。不過目前,移動機器人都是使用高質量的機載可充電蓄電池組來給自身供電,但是一般只能維持幾個小時,一旦電能耗盡,必須采用人工干預的方式來給機器人充電。如果采用人工充電,那么
發表于 01-20 09:39
Labview My RIO 移動機器人
初次使用 NI MyRIO控制器開發四輪全向移動機器人,由四個全向輪和直流電機與增量式編碼器和NI 9001控制器組成,安裝了紅外距離和光電傳感器。驅動板由官方提供的H橋驅動板。NI 9001由
發表于 08-21 12:20
機器人、協作機器人和移動機器人,你分的清楚嗎
我覺得現在是時候討論一些更有趣的話題,今天的話題是介紹工業機器人、協作機器人和移動機器人。我想每個人都知道機器人是什么。機器人是可怕的大型
發表于 10-30 11:33
如何實現移動機器人的設計?
移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動機器人技術涉及到傳感器技術
發表于 11-23 15:08
請問怎么設計一種室外移動機器人組合導航定位系統?
怎么設計一種室外移動機器人組合導航定位系統?如何實現室外移動機器人組合導航定位系統的硬件設計?如何實現室外移動機器人組合導航定位系統的軟件設計?
發表于 04-19 10:50
什么是移動機器人軟硬件系統問題
接觸了移動機器人這么久,我覺得應該寫點什么東西,分享一下最基礎的自己關于移動機器人的理解,也作為筆記總結,留到以后查閱。目前我還是覺得自己剛入門,有時候總想的太多,不如實踐來的更直接,下面總結之前
發表于 08-06 06:13
差速移動機器人軌跡跟蹤控制方法
差速移動機器人軌跡跟蹤控制方法一、引言二·、基礎準備1.去除GPS數據中的壞點2.經緯度與平面坐標系轉換3.差速移動機器人數學建模三、基于PID的差分移動機器人軌跡跟蹤方法1、控制律設計2、航向角
發表于 09-01 08:41
基于Matlab和VR技術的移動機器人建模及仿真
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現實 (VR )環境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結果表明
發表于 09-20 06:24

dfrobot海盜船4WD小車機器人套件介紹
看過炫酷的海盜4WD機器人移動平臺,是不是想嘗試打造屬于自己的機器人小車呢?現在DFRobot就為你準備了這款完備的基礎
dfrobotMiniQ 4WD教育機器人簡介
本款小車為MiniQ 4WD教育機器人的“越野版”,底盤離地間隙由9mm調整為25mm,同時取消了5個巡線傳感器,從而適應復雜的地形環境。







 工商網監
工商網監
評論