 dfrobot360度編碼器開關簡介
dfrobot360度編碼器開關簡介






簡介
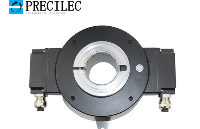
DFRobot新品360度編碼器開關,基于旋轉編碼器設計,專為音量旋鈕、燈光調節等場景設計。模塊擁有三路輸出,其中A、B端口為編碼器脈沖輸出,可以通過AB相位差來判斷旋轉方向與旋轉圈數。C端為按鈕開關,當按下開關時,輸出低電平,可以用來配置相關參數。本產品使用簡單,用途廣泛,可以應用在汽車電子,多媒體音箱,儀器儀表,智能家居等各種領域。
特性
高靈敏度
性價比高
A、B相位差輸出
小尺寸,方便安裝
技術規格
工作電壓:3.3V~5V
全回轉角度:360度(無止檔點)
單圈脈沖數:15
回轉壽命:30000±200 Cycles
接觸電阻:≤100mΩ
絕緣阻抗:100MΩ以上
振蕩:<10ms按壓
工作溫度:-30℃~+80℃
模塊尺寸:33.8 * 22.4(mm)/1.3 * 1.1(inches)
安裝孔尺寸:內徑3.1mm/外徑6mm
重量:14g
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35219 -
DFRobot
+關注
關注
4文章
1156瀏覽量
9450
發布評論請先 登錄
相關推薦
高精度磁編碼器選型指南 磁編碼器的安裝與調試技巧
高精度磁編碼器選型指南 精度要求 : 確定所需的測量精度,例如角度分辨率、線性度等。高精度磁編碼器通常具有更高的分辨率和更好的線性度,適用于對測量精度要求較高的應用。 工作環境 : 考
增量編碼器與絕對值編碼器的區別
增量編碼器與絕對值編碼器的區別:增量編碼器與絕對值編碼器在精度特點對比
增量編碼器的精度取決于脈沖的數量和測量的細分程度,通常情況下,其精度

二進制編碼器與絕對編碼器的區別
編碼器是工業自動化和機器人技術中不可或缺的組件,用于將機械位置或運動轉換為電信號。二進制編碼器和絕對編碼器是兩種常見的編碼器類型,它們各自有著獨特的特點和應用場景。 二進制
磁電編碼器和光電編碼器的區別
磁電編碼器和光電編碼器是兩種不同類型的編碼器,它們在原理、結構、性能和應用領域上都有所不同。 磁電編碼器和光電編碼器的區別 1. 引言
光電軸角編碼器 準確度等級5級是多少
光電軸角編碼器的準確度等級是衡量其測量精度的一個重要指標。對于準確度等級為5級的光電軸角編碼器,其相關的計量特性通常包括分度誤差、測角重復性和零位誤差等。 一、分度誤差 分度誤差是
伺服電機編碼器種類有哪些?
伺服電機編碼器分很多種,有直接轉速型編碼器、有位置分辨率型編碼器、有高精度位姿編碼輸出和高靈敏度位移測量等類型。下面我們來了解一下伺服電機
伺服電機編碼器的型號怎么看
的編碼器類型,它通過測量電機軸的旋轉角度變化來提供位置和速度信息。增量式編碼器通常有兩個輸出信號,分別為A相和B相,它們之間存在90度的相位差。通過測量A相和B相的脈沖數,可以計算出電機的旋轉角度。 1.2 絕對式
伺服電機編碼器的原理及使用注意事項
伺服電機編碼器作為現代自動化系統中不可或缺的組成部分,其性能的優劣直接影響到整個系統的穩定性和精確度。本文將對伺服電機編碼器的原理進行詳細解析,并列舉使用編碼器時需要注意的事項,旨在幫
增量編碼器和絕對值編碼器的區別
在工業自動化和精密測量領域,編碼器是不可或缺的關鍵設備。編碼器能夠將機械位移轉換為電信號,以便于計算機或其他數字系統進行處理。在編碼器的眾多類型中,增量編碼器和絕對值
絕對值編碼器結構簡介
絕對值編碼器結構簡介
絕對值編碼器由一個帶有光柵的碼盤構成,碼盤能夠自由旋轉。當碼盤旋轉時,由光電檢測系統檢測到的光柵信號會發生變化,這些變化轉化為電信號,根據信號處理后,可以獲得與碼盤旋轉角度相對應的數字代碼輸出。
編碼器分辨率是什么意思 編碼器分辨率和脈沖數的關系
按照編碼器支持的分辨率可以把編碼器分成標清編碼器、高清編碼器、全高清編碼器,分辨率越高幀率越高視頻就越清楚。 1.

編碼器原點設定方法 | 編碼器原點丟失怎樣找回
? 編碼器原點有什么功能 編碼器的原點功能主要用于確定位置參考、啟動和停止控制、運動方向判斷以及定位回歸操作。這些功能對于許多應用中的位置測量、運動控制和定位操作至關重要。 編碼器的原點具有以下功能
編碼器好壞怎么判斷,編碼器原理
編碼器(Encoder)是將輸入數據轉化為特定編碼表示的一種技術。對于不同類型的編碼器,評判其好壞可以從多個方面進行考量,包括編碼質量、速度、模型結構等。
磁性編碼器和光電編碼器的比較
伺服電機編碼器是一種關鍵的反饋裝置,用于測量和控制電機的轉速和位置。在選擇伺服電機編碼器時,常常面臨一個選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個關鍵方面比較這兩種類型的






 工商網監
工商網監
評論