") 飛凌嵌入式北斗&GPS模塊介紹
飛凌嵌入式北斗&GPS模塊介紹
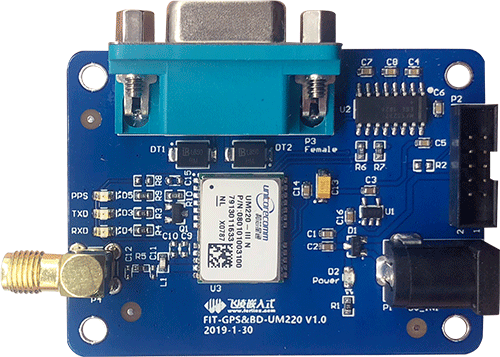
產(chǎn)品名稱:北斗&GPS模塊
規(guī)格型號:FIT-GPS&BD-UM220 V1.0模塊
產(chǎn)品接口:串口
產(chǎn)品功能:飛凌GPS&北斗模塊支持LVCMOS與RS232兩種接口形式,芯片采用芯星通針對車載包括導(dǎo)航、監(jiān)控應(yīng)用推出的BDS/GPS雙模定位模塊,成本低,性價比高,常適用于對成本敏感的大規(guī)模應(yīng)用推廣
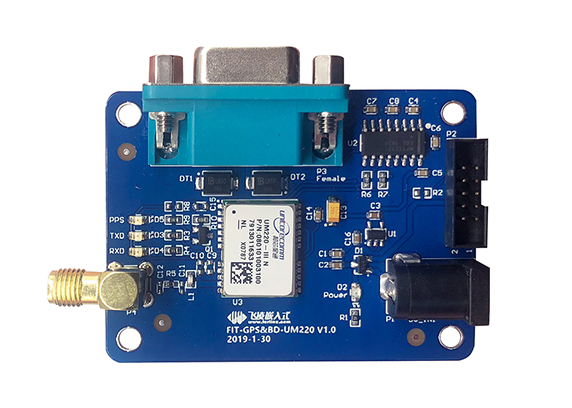
飛凌GPS&北斗模塊支持LVCMOS與RS232兩種接口形式,芯片采用芯星通針對車載包括導(dǎo)航、監(jiān)控應(yīng)用推出的BDS/GPS雙模定位模塊,成本低,性價比高,常適用于對成本敏感的大規(guī)模應(yīng)用推廣,出色的導(dǎo)航定位功能,支持A-GNSS輔助定位功能,能夠同時支持BD2 B1、GPS L1兩個頻點,并且將1PPS(秒脈沖)功能引出,用戶可根據(jù)自己需求使用。可廣泛應(yīng)用開發(fā)各種GPS終端產(chǎn)品,如:汽車導(dǎo)航汽車保全系統(tǒng)、車輛監(jiān)控以及其他衛(wèi)星定位應(yīng)用等。
| 類目 | 名稱 | 描述 |
| 芯片 | UM220-Ⅲ NL | 低功耗GNSS SoC |
| 射頻輸入 | 頻率 |
BDS B1&GPS L1, 1559-1577MHz |
| 駐波比 | ≤1.5 | |
| 輸入阻抗 | 50歐姆 | |
| GNSS性能 | 定位精度 |
2.5m CEP (雙系統(tǒng)水平,opensky) |
| 測速精度(RMS) | GPS/雙模:0.1m/s | |
| 北斗:0.2m/s(open sky) | ||
| 首次定位時間TTFF | 冷啟動30s | |
| 熱啟動1s | ||
| 重捕獲<1s | ||
| 靈敏度 | 跟蹤 | -160dBm |
| 捕獲 |
北斗:-145dBm GPS: -147dBm |
|
| 熱啟/重捕 | -150dBm | |
| 1PPS精度(RMS) | 20ns | |
| 數(shù)據(jù)更新率 | 1Hz | |
| 導(dǎo)航數(shù)據(jù)格式 | 基于NMEA0183,擴(kuò)展兼容北斗 | |
| 電源 | 主電源 | 推薦5V |
| 功耗 | 120mW(典型值) | |
| 峰值電流 | 100mA | |
| 接口 | 簡易牛角座串口 |
LVTTL電平, 波特率4800-115200bps 默認(rèn)9600bps |
| DB9母頭 |
RS232電平, 波特率4800-115200bps 默認(rèn)9600bps |
|
| GPS&北斗模塊支持飛凌嵌入式開發(fā)板詳情 | |
| 支持開發(fā)板 | 支持系統(tǒng) |
| OKMX6Q-C | Linux3.0.35/4.1.15、Android4.4/6.0 |
| OKMX6Q-S3 | Linux3.0.35/4.1.15、Android4.4/6.0 |
| OKMX6DL-S3 | Linux3.0.35/4.1.15、Android4.4/6.0 |
| OKMX6UL | Linux3.14.38/4.1.15 |
| OK335xD | Linux3.2、Android2.3/4.2 |
| OK335xS | Linux3.2、Android2.3/4.2 |
| OK335xS-II | Linux3.2 |
| OK4418-C | Linux3.4.39、Android5.1.1 |
| OK6818-C | Linux3.4.39、Android5.1.1 |
| OK5718-C | Linux4.9.41 |
| OK1052-C | uClinux |
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
Linux
+關(guān)注
關(guān)注
87文章
11123瀏覽量
207920 -
嵌入式主板
+關(guān)注
關(guān)注
7文章
6081瀏覽量
34942 -
安卓
+關(guān)注
關(guān)注
5文章
2107瀏覽量
56710
發(fā)布評論請先 登錄
相關(guān)推薦
飛凌嵌入式Forlinx pinMux,更好用的MPU引腳復(fù)用配置工具
飛凌嵌入式打造了一款專門針對ARM嵌入式MPU引腳復(fù)用的軟件工具——Forlinx pinMux

飛凌嵌入式技術(shù)創(chuàng)新日(深圳站)精彩回顧
分享了瑞芯微工業(yè)解決方案,展示了瑞芯微在工業(yè)領(lǐng)域的智能化發(fā)展方面的“芯”力量。
&amp;lt;&amp;lt; 左滑查看更多
活動的下半場,
發(fā)表于 08-28 09:06
飛凌嵌入式OK210試用活動中獎名單新鮮出爐
飛凌嵌入式舉辦的OK210開發(fā)板試用活動圓滿結(jié)束,非常感謝大家對飛凌的支持。本次活動我們共發(fā)出100塊OK210試用開發(fā)板,得到了眾多朋友
發(fā)表于 12-22 16:38
嵌入式平臺選型資料U盤 免費發(fā)放-飛凌嵌入式
ARM相關(guān)技術(shù)日新月異,嵌入式開發(fā)平臺玲瑯滿目,工程師在對產(chǎn)品進(jìn)行選型時往往會感到困惑。為了幫助您更方便的進(jìn)行選型,我們整理了飛凌公司基于NXP、TI、SAMSUNG等品牌的主流開發(fā)板資料與一些
發(fā)表于 01-05 09:47
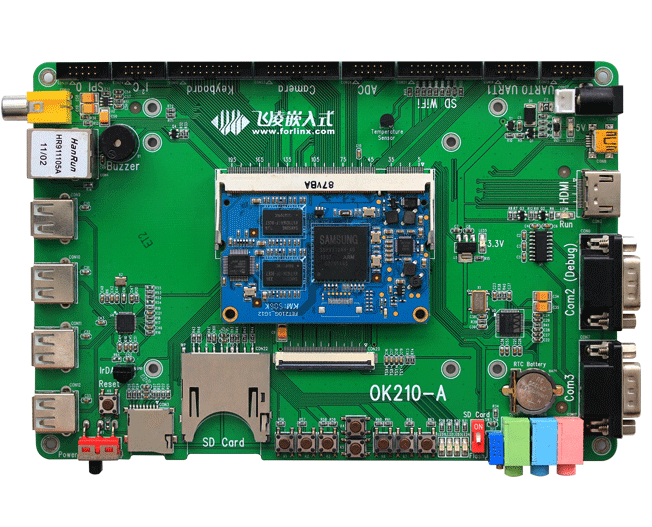
飛凌嵌入式OK210-A開發(fā)板介紹
OK210A是一款由飛凌嵌入式自主設(shè)計并生產(chǎn)制造的高性能ARM嵌入式計算機(jī)核心模塊。

飛凌嵌入式亮相上海國際嵌入式展
產(chǎn)品打造優(yōu)質(zhì)展示平臺,同時對接國內(nèi)外嵌入式市場與應(yīng)用領(lǐng)域的專業(yè)采購商,飛凌嵌入式受邀參展,展位號B155。

坐標(biāo)蘇州,飛凌嵌入式華東技術(shù)服務(wù)中心成立
飛凌嵌入式“華東技術(shù)服務(wù)中心”在蘇州正式成立,這是繼華南技術(shù)服務(wù)中心(深圳)之后飛凌嵌入式開設(shè)的

AMP“雙系統(tǒng)”加持,飛凌嵌入式RK3568核心板強(qiáng)實時性再升級
飛凌嵌入式FET3568-C系列核心板再度迎來新升級——支持“AMP”雙系統(tǒng)。

圓滿收官|飛凌嵌入式CACLP 2024精彩回顧
本屆CACLP,飛凌嵌入式展示了多款嵌入式主控產(chǎn)品,這些產(chǎn)品覆蓋了體外診斷、醫(yī)學(xué)影像、生命體征監(jiān)測以及新興的5G醫(yī)療應(yīng)用等多個領(lǐng)域,充分體現(xiàn)了飛
下周見!飛凌嵌入式即將亮相2024上海國際嵌入式展
2024上海國際嵌入式展(embeddedworldChina2024),即將于6月12日~14日在上海世博展覽館舉行。屆時,飛凌嵌入式將攜多款前沿的

劇透!「飛凌嵌入式技術(shù)創(chuàng)新日」3大亮點搶先看
6月25日,飛凌嵌入式技術(shù)創(chuàng)新日(北京站)即將開幕,一場嵌入式前沿科技的高端局就在眼前。飛凌






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論