") 傳統(tǒng)式和非傳統(tǒng)式陀螺儀的發(fā)展趨勢(shì)
傳統(tǒng)式和非傳統(tǒng)式陀螺儀的發(fā)展趨勢(shì)
摘要:梳理了陀螺經(jīng)緯儀的發(fā)展歷史,總結(jié)了各個(gè)階段陀螺儀的基本特點(diǎn)。結(jié)合國(guó)外機(jī)械式陀螺儀的發(fā)展現(xiàn)狀,通過(guò)分析4種具有代表性的陀螺儀的優(yōu)缺點(diǎn),探討了傳統(tǒng)式和非傳統(tǒng)式陀螺儀的發(fā)展趨勢(shì),并指出陀螺儀未來(lái)必將朝著便攜化、高精度、高可靠性和低成本的方向發(fā)展。
0引言
隨著陀螺儀的快速發(fā)展,完善解決了導(dǎo)彈武器系統(tǒng)的定向問(wèn)題。傳統(tǒng)的機(jī)械式陀螺儀具有可靠性高、技術(shù)成熟、應(yīng)用廣泛等特點(diǎn);新型陀螺儀,如激光陀螺儀、冷原子陀螺儀等,具有結(jié)構(gòu)精簡(jiǎn)、技術(shù)先進(jìn)、精度較高等優(yōu)勢(shì)。這兩種陀螺儀都在不同的領(lǐng)域里發(fā)揮著重要的作用。
1陀螺經(jīng)緯儀的發(fā)展歷程
陀螺經(jīng)緯儀的概念最早是由法國(guó)物理學(xué)家傅科(Foucault L)于1852年提出:如果將高速旋轉(zhuǎn)的陀螺放在一個(gè)萬(wàn)向支架上,就可以利用陀螺在高速旋轉(zhuǎn)時(shí)保持穩(wěn)定的特性來(lái)辨認(rèn)方向,并且這種定向不依賴外部信息完全自主。進(jìn)入20世紀(jì)以后,電氣化實(shí)現(xiàn)了大的變革。1920年,德國(guó)工程師舒勒研制了第1臺(tái)真正意義上的陀螺經(jīng)緯儀并用于礦井定向;到了20世紀(jì)中葉,德、蘇、英、美等西方發(fā)達(dá)國(guó)家逐漸認(rèn)識(shí)到了精確定向的重要性,陀螺經(jīng)緯儀的研發(fā)進(jìn)入了新的階段,各項(xiàng)指標(biāo)不斷更新。
陀螺儀的發(fā)展大致經(jīng)歷了以下4個(gè)階段:
1)第1階段:液浮式陀螺經(jīng)緯儀。液浮式陀螺經(jīng)緯儀是將陀螺靈敏部放在液體環(huán)境中漂浮起來(lái),感知地球自轉(zhuǎn),從而實(shí)現(xiàn)尋北。這種方式對(duì)靈敏部重心的穩(wěn)定性要求極高,靈敏部?jī)?nèi)的線圈不對(duì)稱,供電電壓不穩(wěn)定,都會(huì)對(duì)重心造成擾動(dòng),導(dǎo)致儀器測(cè)量失敗。
2)第2階段:懸掛擺式陀螺經(jīng)緯儀。拋棄原來(lái)的液浮設(shè)計(jì),利用懸?guī)⑼勇蒉D(zhuǎn)子懸掛起來(lái),使其感知地球自轉(zhuǎn),并完成尋北。這一設(shè)計(jì)簡(jiǎn)化了儀器內(nèi)部結(jié)構(gòu),增強(qiáng)了儀器的抗干擾性,也大幅提高了尋北精度。在這一階段,陀螺儀與經(jīng)緯儀開(kāi)始結(jié)合,形成上架式陀螺經(jīng)緯儀,儀器的集成度大大提高。
3)第3階段:全自動(dòng)陀螺經(jīng)緯儀。原始的擺式陀螺經(jīng)緯儀靈敏部需要手動(dòng)上鎖、下放和限幅,這些都需要很長(zhǎng)時(shí)間,尤其是手動(dòng)限幅過(guò)程,不僅費(fèi)時(shí),還對(duì)操作人員的熟練程度有很高的要求。全自動(dòng)陀螺經(jīng)緯儀利用光電轉(zhuǎn)換元件敏感陀螺靈敏部的位置,通過(guò)伺服電機(jī)進(jìn)行靈敏部的上鎖、下放和限幅,大幅度縮短了儀器測(cè)量時(shí)間。
4)第4階段:新型陀螺經(jīng)緯儀。上述3種都是傳統(tǒng)陀螺經(jīng)緯儀,也稱為機(jī)械式陀螺經(jīng)緯儀,其共同點(diǎn)是都具有機(jī)械陀螺結(jié)構(gòu),并且利用陀螺的高速旋轉(zhuǎn)來(lái)尋找真北。隨著科技的發(fā)展,已經(jīng)出現(xiàn)新型陀螺經(jīng)緯儀,即激光陀螺、光纖陀螺、冷原子干涉陀螺等。但是,目前由于技術(shù)限制,還存在著很多問(wèn)題,未大量投入生產(chǎn)使用。
2國(guó)外先進(jìn)機(jī)械式陀螺經(jīng)緯儀概況
自1947年以來(lái),德國(guó)、蘇聯(lián)、英國(guó)、匈牙利、瑞士、美國(guó)、日本等國(guó)家先后開(kāi)展了機(jī)械式陀螺儀的研究。在這段歷史中,擺式陀螺儀的發(fā)展大體經(jīng)歷了船舶陀螺羅經(jīng)、液體漂浮式陀螺經(jīng)緯儀、下架懸掛式陀螺經(jīng)緯儀和上架式陀螺經(jīng)緯儀4個(gè)階段,目前正向小型化、自動(dòng)化、智能化方向發(fā)展。有關(guān)國(guó)外機(jī)械擺式陀螺儀基本情況見(jiàn)表1。
表1 國(guó)外機(jī)械擺式陀螺儀基本情況
國(guó)外的相關(guān)研究起步較早,積累的經(jīng)驗(yàn)比較豐富,已經(jīng)形成了系列技術(shù)成熟的工業(yè)產(chǎn)品。目前國(guó)外最先進(jìn)的擺式陀螺尋北技術(shù)主要集中在德國(guó)DMT公司研制的 GYROMAT系列陀螺經(jīng)緯儀、美國(guó)利爾西格勒公司研制的MARCS陀螺經(jīng)緯儀和烏克蘭研制的GK-30、GK-3尋北儀等產(chǎn)品。
2.1 GYROMAT系列陀螺經(jīng)緯儀
德國(guó)DMT公司研制的陀螺經(jīng)緯儀有GYROMAT 2000、GYROMAT 3000和最新研制的GYROMAT 5000,在尋北精度、尋北時(shí)間和尋北范圍3項(xiàng)重要指標(biāo)方面都非常出色。該系列陀螺經(jīng)緯儀的優(yōu)點(diǎn)表現(xiàn)在以下4個(gè)方面:
1)充分結(jié)合尋北過(guò)程中各階段的特點(diǎn),優(yōu)化各階段設(shè)計(jì),并具有3種尋北模式,能夠滿足不同情況下的測(cè)量;
2)采用加粗的大截面金屬懸?guī)В欣谟?jì)算懸?guī)Я阄慌c平衡位置夾角,取消了導(dǎo)流絲結(jié)構(gòu),并將陀螺電機(jī)的供電電池進(jìn)行內(nèi)置,提高了懸?guī)Я阄坏姆€(wěn)定性;
3)降低了陀螺轉(zhuǎn)子的轉(zhuǎn)速,可以有效減小功率和擺動(dòng)周期。采用該方法的相關(guān)文獻(xiàn)試驗(yàn)證明了降低轉(zhuǎn)速不僅可以縮短尋北時(shí)間,還可以減小儀器溫度變化,從而減小誤差;
4)可以實(shí)時(shí)檢測(cè)儀器內(nèi)外溫差以及陀螺漂移。如果出現(xiàn)過(guò)大偏差,儀器便會(huì)報(bào)警,確保了結(jié)果的準(zhǔn)確性。GYROMAT陀螺經(jīng)緯儀外形圖如圖1所示。
圖1 GYROMAT陀螺經(jīng)緯儀外形圖
盡管該型陀螺經(jīng)緯儀有諸多優(yōu)點(diǎn),但也存在以下3個(gè)方面的不足:
1)儀器昂貴,周期長(zhǎng),費(fèi)用高,尤其是內(nèi)置電池組一般使用2~3年就需要更換,并只能返廠進(jìn)行維修保障;
2)儀器的溫度適應(yīng)性不強(qiáng),對(duì)溫度的變化要求非常嚴(yán)格,工作時(shí)儀器內(nèi)外溫差不能超過(guò)5℃,溫度梯度變化不能超過(guò)0.25℃/min,極大地限制了儀器的野外作業(yè)。
3)儀器工作時(shí)一旦出現(xiàn)問(wèn)題就無(wú)法繼續(xù)工作,連手動(dòng)測(cè)量都無(wú)法進(jìn)行。
2.2 MARCS陀螺經(jīng)緯儀
美國(guó)利爾西格勒公司研制的MARCS(Master Azimuth Reference CalibrationStandard)陀螺經(jīng)緯儀有以下3個(gè)突出特點(diǎn):
1)對(duì)導(dǎo)流絲的設(shè)計(jì)進(jìn)行了改動(dòng),不再采用U型結(jié)構(gòu),改用水平同心圓環(huán)結(jié)構(gòu),提高了電機(jī)運(yùn)行的穩(wěn)定性,并擁有較好的力學(xué)性能;
2)采用自動(dòng)阻尼跟蹤法,主要有位置阻尼階段和伺服阻尼階段,其工作原理是通過(guò)敏感靈敏部的扭力矩,計(jì)算出偏北角,而后控制儀器偏轉(zhuǎn)相應(yīng)角度,兩個(gè)階段依次工作,最終完成尋北過(guò)程。整個(gè)過(guò)程依靠精確的控制方法和良好的力矩器性能實(shí)現(xiàn)高精度尋北;
3)特殊的鎖放機(jī)構(gòu)設(shè)計(jì)可以讓靈敏部較為平穩(wěn)地下放。
MARCS陀螺經(jīng)緯儀的不足之處體現(xiàn)在:由于其精細(xì)的控制方法造成了儀器結(jié)構(gòu)復(fù)雜,而且儀器容易受到環(huán)境影響,不能應(yīng)用于實(shí)戰(zhàn),只能在實(shí)驗(yàn)室的標(biāo)準(zhǔn)環(huán)境下進(jìn)行測(cè)量,因此極大限制了使用范圍。
2.3 烏克蘭研制的GK-3、GK-30尋北儀
GK-3陀螺經(jīng)緯儀屬于基準(zhǔn)級(jí)尋北儀,常溫室內(nèi)一次測(cè)量方位角的標(biāo)準(zhǔn)差為1″~3″(1σ),尋北時(shí)間37min~2h,其懸掛系統(tǒng)采用磁懸浮技術(shù),并通過(guò)多位置測(cè)量力矩自動(dòng)計(jì)算出儀器視準(zhǔn)軸方向的方位角。GK-30尋北儀屬于原蘇聯(lián)SS-20戰(zhàn)略導(dǎo)彈的定向設(shè)備,尋北時(shí)間9min,可靠性高,車載工作抗震性能好,自動(dòng)化程度較高,全環(huán)境下ー次測(cè)量方位角的標(biāo)準(zhǔn)差≤30″(1σ)。磁懸浮式懸掛系統(tǒng)是用電磁力使陀螺敏感元件懸浮于系統(tǒng)中,是一種無(wú)摩擦、無(wú)磨損的懸掛方式,它沒(méi)有機(jī)械金屬懸?guī)АK裕诮饘賾規(guī)綉覓煜到y(tǒng)中,懸?guī)ЫY(jié)構(gòu)特性變化和變形引起的零位變化在磁懸浮式懸掛系統(tǒng)中不存在。另外,它將測(cè)量敏感元件的周期擺動(dòng)測(cè)北改為測(cè)量指北反饋力矩測(cè)北,使尋北時(shí)間大大縮短,從而實(shí)現(xiàn)了快速精確尋北。
2.4 日本的AGP-1全自動(dòng)陀螺全站儀
圖2為AGP-1全自動(dòng)陀螺全站儀,由日本索佳公司生產(chǎn),分為自動(dòng)陀螺儀和全站儀兩部分。AGP-1功能十分強(qiáng)大,只需在鍵盤上簡(jiǎn)單操作,屏幕上就會(huì)實(shí)時(shí)顯示當(dāng)前尋北數(shù)據(jù),并且具有3種測(cè)量模式,尋北精度最高可達(dá)到±6″,尋北時(shí)間約10min。AGP-1內(nèi)部電機(jī)為可編程直流電機(jī),可以直接接受電子指令控制,加速功率1.0W,啟動(dòng)時(shí)間小于25s,制動(dòng)時(shí)間小于30s,性能十分優(yōu)越。采用整機(jī)一體化設(shè)計(jì),操作方便快捷,自動(dòng)化程度高。由于其強(qiáng)大的尋北效能,AGP-1在隧道、礦井、坑道等封閉場(chǎng)所得到廣泛應(yīng)用。
圖2 AGP-1全自動(dòng)陀螺全站儀
3陀螺經(jīng)緯儀未來(lái)發(fā)展趨勢(shì)
隨著船艦航海、礦石開(kāi)采、石油鉆探、隧道挖掘以及軍事領(lǐng)域?qū)け倍ㄏ虻囊笤絹?lái)越高,陀螺經(jīng)緯儀在不依賴外部信息、完全自主的定向儀器特性方面顯得越來(lái)越重要。世界各國(guó)也都在加緊研發(fā)更先進(jìn)的陀螺經(jīng)緯儀。目前,相關(guān)領(lǐng)域的熱點(diǎn)方向主要有:
1)繼續(xù)研究傳統(tǒng)機(jī)械式陀螺經(jīng)緯儀,將先進(jìn)的尋北算法、優(yōu)良的硬件芯片、靈敏的傳感技術(shù)、成熟的控制理論與機(jī)楲陀螺結(jié)合起來(lái),不斷提高儀器的尋北精度、縮短尋北時(shí)間、提高自動(dòng)化水平。
2)研究新型陀螺,簡(jiǎn)化陀螺結(jié)構(gòu),向小型化便攜化、平價(jià)化發(fā)展,如激光陀螺、光纖陀螺MEMS陀螺、冷原子干涉陀螺等。
3.1 傳統(tǒng)機(jī)械式陀螺儀的發(fā)展趨勢(shì)
傳統(tǒng)機(jī)械式陀螺經(jīng)緯儀的控制技術(shù)相對(duì)成熟,下一步的主要發(fā)展方向是提高結(jié)構(gòu)一體化程度,增進(jìn)尋北精度,具體體現(xiàn)在以下3個(gè)方面:
1)實(shí)現(xiàn)全方位尋北。
目前,國(guó)外先進(jìn)的陀螺經(jīng)緯儀對(duì)初始架設(shè)方位角都沒(méi)有要求,基本上都可以實(shí)現(xiàn)全方位尋北。要減小陀螺儀的尋北時(shí)間,提高陀螺儀的環(huán)境適應(yīng)性。在偏離真北方向角度過(guò)大時(shí),也能通過(guò)掌握陀螺儀運(yùn)動(dòng)規(guī)律,解決靈敏部幅度擺動(dòng)過(guò)大等問(wèn)題,實(shí)現(xiàn)大偏角情況下的尋北。
2)實(shí)現(xiàn)儀器的集成化。
從國(guó)外先進(jìn)的陀螺儀發(fā)展情況來(lái)看,一體化的發(fā)展將進(jìn)一步減小陀螺儀的體積和質(zhì)量,方便陀螺儀的運(yùn)輸。目前,還是有相當(dāng)一部分陀螺儀是分體式的,需要主機(jī)再加一個(gè)電控箱,二者之間利用電纜連接,這不僅在通信時(shí)容易造成干擾,還使得架設(shè)運(yùn)輸很不方便。造成這一問(wèn)題的主要原因在于硬件設(shè)計(jì)的集成度不夠,大量的電路板難以與主機(jī)中的各種機(jī)械結(jié)構(gòu)有機(jī)結(jié)合起來(lái),導(dǎo)致不得不單獨(dú)把電路部分隔離出來(lái)。要實(shí)現(xiàn)儀器的集成化,就需要對(duì)電路部分進(jìn)行再設(shè)計(jì),減小電路板的數(shù)量和尺寸。
3)提高儀器的尋北性能。
尋北精度和尋北時(shí)間是衡量陀螺經(jīng)緯儀性能的核心指標(biāo)。對(duì)儀器的性能要求是永無(wú)止境的,尤其是在軍事領(lǐng)域中,測(cè)量準(zhǔn)、測(cè)量快就能在戰(zhàn)爭(zhēng)中取得主導(dǎo)地位,甚至取得戰(zhàn)爭(zhēng)勝利。提高儀器的核心性能需要在核心技術(shù)上下功夫,包括改進(jìn)尋北算法、提高機(jī)械加工精度、改進(jìn)硬件合理設(shè)計(jì)等方面,這些構(gòu)成了一個(gè)大的系統(tǒng)工程,需要更多科研人員的參與。
3.2 非傳統(tǒng)陀螺儀的發(fā)展趨勢(shì)
隨著科學(xué)技術(shù)的發(fā)展,一大批采用新技術(shù)的陀螺儀涌現(xiàn)了出來(lái),其共同點(diǎn)是摒棄了傳統(tǒng)陀螺儀上的陀螺結(jié)構(gòu),使用了更先進(jìn)的技術(shù)實(shí)現(xiàn)定向。對(duì)陀螺儀的發(fā)展而言,這是一次顛覆性的革命。根據(jù)目前新技術(shù)發(fā)展的成熟度來(lái)看,未來(lái)適用范圍比較良好,同時(shí)控制精度比較高的幾種陀螺儀主要有以下幾種:
1)激光陀螺儀
激光陀螺儀沒(méi)有旋轉(zhuǎn)的轉(zhuǎn)子結(jié)構(gòu),也不需要方向環(huán)框架、框架伺服機(jī)構(gòu)、旋轉(zhuǎn)軸承、導(dǎo)電環(huán)及力矩器和角度傳感器等活動(dòng)器件,因此存在的系統(tǒng)誤差很小。激光陀螺儀啟動(dòng)時(shí)間非常短,接通電源后就能進(jìn)入正常工作,只需50ms就能使零偏穩(wěn)定性達(dá)到0.5°/h,這對(duì)武器系統(tǒng)而言十分寶貴,它的最小敏感角速率小于±0.001°/h。同時(shí),固有的數(shù)字增量輸出方便與計(jì)算機(jī)接口,適合連接系統(tǒng)使用。激光器陀螺儀需要突破的技術(shù)主要是諧振光路中折射系數(shù)的各向異性帶來(lái)的零點(diǎn)漂移。圖3為氦-氖環(huán)形激光陀螺儀。
圖3 氦-氖環(huán)形激光陀螺儀
2)光纖陀螺
光纖陀螺也是基于Sagnac效應(yīng)的一種新型陀螺經(jīng)緯儀。除了具備激光陀螺儀的優(yōu)點(diǎn)外,沒(méi)有閉鎖問(wèn)題,也不用在石英塊精密加工出光路,成本較激光陀螺低得多。目前,美國(guó)Honeywell公司是光纖陀螺行業(yè)的領(lǐng)跑者。該公司制作的光纖陀螺零偏穩(wěn)定性可以達(dá)到0.0001°/h,滿足絕大多數(shù)場(chǎng)合下的定向需求,如圖4所示。從目前的發(fā)展來(lái)看,光纖陀螺最有可能率先實(shí)現(xiàn)對(duì)傳統(tǒng)機(jī)械式陀螺的替代,不過(guò)還需要克服噪聲和光纖雙折射引起的漂移、偏振狀態(tài)改變引起的比例因子不穩(wěn)定等問(wèn)題。
圖4 光纖陀螺儀
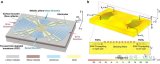
3)MEMS陀螺
MEMS(Micro Electro Mechanical System)陀螺,也稱為微機(jī)電陀螺,是在21世紀(jì)初才發(fā)展起來(lái)的一種交叉學(xué)科領(lǐng)域的技術(shù)。它能夠?qū)C(jī)械構(gòu)件、光學(xué)系統(tǒng)、驅(qū)動(dòng)部件、電控系統(tǒng)集成為一個(gè)整體,不僅能夠?qū)崿F(xiàn)采集、處理與發(fā)送信息或指令的功能,還能夠按照所獲取的信息自主地或根據(jù)外部的指令采取行動(dòng)。圖5為MEMS陀螺儀。基于其體積小、質(zhì)量輕的特點(diǎn),通常將它用在對(duì)安裝空間和質(zhì)量要求比較苛刻的場(chǎng)合,如智能手機(jī)和數(shù)碼相機(jī)的內(nèi)部,未來(lái)將被廣泛應(yīng)用于民用領(lǐng)域。
圖5 意法半導(dǎo)體MEMS陀螺儀
4)冷原子干涉陀螺儀
近幾年,冷原子干涉陀螺儀才逐漸為人們所熟知,如圖6所示。由于原子具有質(zhì)量小、內(nèi)部結(jié)構(gòu)簡(jiǎn)單和能級(jí)不連續(xù)等特點(diǎn),干涉現(xiàn)象能夠呈現(xiàn)比光子更加豐富的內(nèi)容,并且典型的原子德布羅意波比可見(jiàn)光波長(zhǎng)短3萬(wàn)倍,所以原子干涉儀理論精度比光學(xué)干涉儀高得多。在慣性導(dǎo)航領(lǐng)域,理論上原子陀螺儀的靈敏度比光學(xué)陀螺儀至少高1101倍,而在冷原子干涉陀螺儀的慣性導(dǎo)航系統(tǒng)理論上,漂移不超過(guò)10m/h。
盡管冷原子干涉陀螺儀理論精度非常高,但在實(shí)際中存在2個(gè)亟待解決的問(wèn)題:1)實(shí)際測(cè)量精度與理論值相差較大。因?yàn)樾D(zhuǎn)造成了2個(gè)原子波包在干涉時(shí)并不重合,造成的空間位置分離使探測(cè)過(guò)程中的干涉對(duì)比度急劇下降;2)冷原子的制備速率還遠(yuǎn)達(dá)不到系統(tǒng)要求,主要是因?yàn)闇囟取⑤椛洹⑵骷Y(jié)構(gòu)等對(duì)冷原子存在較大影響,進(jìn)而導(dǎo)致與陀螺儀相關(guān)的精度、測(cè)量時(shí)間都受到影響。目前來(lái)看,盡管冷原子干涉下的陀螺儀在精度理論上能達(dá)到很高,但是冷原子提取核心技術(shù)在未取得長(zhǎng)足發(fā)展之前,難以實(shí)現(xiàn)量產(chǎn)。
圖6 斯坦福大學(xué)冷原子陀螺儀
4結(jié)束語(yǔ)
無(wú)論在民用領(lǐng)域,還是軍事領(lǐng)域,陀螺經(jīng)緯儀占據(jù)的地位愈發(fā)重要。它的發(fā)展極大地提高了系統(tǒng)的定向精度,縮短了定向時(shí)間。尤其在軍事應(yīng)用方面,符合現(xiàn)代戰(zhàn)爭(zhēng)快速性、精確性、機(jī)動(dòng)性打擊等特點(diǎn)。從發(fā)展趨勢(shì)來(lái)看,由于民用和軍事領(lǐng)域的需求不同,陀螺儀也會(huì)相應(yīng)開(kāi)發(fā)出不同的精度和成本系列。不過(guò)隨著新技術(shù)的發(fā)展和改進(jìn),傳統(tǒng)的機(jī)械式陀螺儀必將被逐步取代,陀螺儀將朝著一體化高精度、高可靠性、低成本方向發(fā)展。
-
陀螺儀
+關(guān)注
關(guān)注
44文章
780瀏覽量
98583 -
陀螺經(jīng)緯儀
+關(guān)注
關(guān)注
0文章
3瀏覽量
6091
原文標(biāo)題:陀螺經(jīng)緯儀發(fā)展綜述
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
愛(ài)普生(EPSON)陀螺儀傳感器的特點(diǎn)和應(yīng)用領(lǐng)域介紹
基于聚焦叉指換能器的環(huán)形SAW陀螺儀制造工藝及測(cè)量方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論