 一文介紹UWB測距的原理和應用
一文介紹UWB測距的原理和應用
本文微能信息(95power)小編分享一下UWB測距的原理和簡單應用。
(一)UWB測距原理
UWB測距原理基于雙向飛行時間法(TW-TOF,two way-time of flight)。即每個UWB模塊從啟動開始即會生成一條獨立的時間戳。 UWB模塊A的發射機在其時間戳上的Ta1發射請求性質的脈沖信號,UWB模塊B接收機在其時間戳上的Tb1接收到該信號。對UWB信號加以一定的處理手段后,UWB模塊B在Tb2時刻發射一個響應性質的信號,被UWB模塊A在自己的時間戳Ta時刻接收。由此可以計算出脈沖信號在兩個UWB模塊之間的飛行時間,從而確定飛行距離。
距離S=光速C×[(Ta2-Ta1) -(Tb2-Tb1)]

(二)UWB測距的應用有哪些呢,常用的有以下兩類。
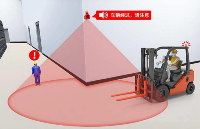
第一類:UWB測距-防碰撞應用
將UWB測距應用于安全方面可以擴展如下的一些應用,比如常見的是防碰撞應用。UWB測距精度最高能到10厘米左右,微能信息(95power)的UWB測距模塊最遠測距距離可以擴展到150米。 10CM高精度UWB測距可以用于檢測兩個物體之間的距離,當兩者距離超過一個限定值,可設置報警,防止安全事故發生。

第二類:UWB測距-UWB定位應用
UWB測距還有一類常見應用是做室內定位應用,UWB測距的高精度決定了這項技術可以應用于超寬帶室內定位方面,目前微能信息推出的UWB定位系統方案,定位精度最高到10CM,根據不同的定位場景,誤差一般在10厘米-30厘米。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
UWB測距
+關注
關注
0文章
11瀏覽量
7358
發布評論請先 登錄
相關推薦



UWB模塊的測距精度分析
隨著物聯網(IoT)和工業4.0的發展,對精確測距和定位的需求日益增長。超寬帶(UWB)技術因其獨特的優勢,成為實現高精度測距的關鍵技術之一。 超寬帶技術概述 超寬帶技術是
如何選擇合適的UWB模塊
選擇合適的UWB(超寬帶)模塊需要考慮多個因素,以確保模塊能夠滿足特定應用場景的需求。以下是一些關鍵因素和步驟,幫助您選擇合適的UWB模塊: 一、了解
「知識篇」UWB精確測距與定位技術優勢的詳細探討
UWB650模塊是思為無線新發布的一款雙邊雙向測距,三點平面定位模塊,WB650模塊是在UWB3000F27基礎上研發,并搭載單片機,用戶無需配置可直接使用。
遵循IEEE
精準定位的選擇指南:藍牙與UWB(超寬帶)技術的全面對比
UWB3000F27,UWB3000F00用于雙向遠距離測距、TDoA和PDoA系統,定位精度可達10厘米。
UWB650模塊將UWB技術應

一文介紹:UWB定位基站種類及選擇
如果想要給一個空間做UWB定位那就必須要預先在該空間裝好定位基站,基站通過UWB信號和定位標簽進行通信,最終實現被定位目標的精確定位。市面主流UWB定位基站分如下6類:室內型定位基站;

一文介紹:UWB定位標簽種類及選擇
UWB定位系統定位的是標簽的位置,因為人員、車輛、物資攜掛著標簽進而推斷出人/車/物的實時位置。那么在實際項目中,我們該如何選擇適合自身的標簽呢?本文將做詳細介紹。

一文介紹:UWB-AOA產品特點及其應用
寫在前面:好多朋友經常把藍牙AOA和UWB-AOA混淆,傻傻分不清楚。UWB和藍牙分屬兩種無線電技術,AOA指的是測量無線電到達信號的角度,UWB-AOA和藍牙AOA是兩種完全不同的產品,相較于藍牙AOA
一文帶你了解什么是UWB三角定位、TDoA和PDoA定位
UWB3000F27模塊三角定位的優勢:
定位精度:由于UWB技術的高帶寬特性,定位精度精確到10cm
支持雙向測距:TDoA和PDoA定位方案
數據傳輸率:數據速率支持850kbps
UWB技術
UWB,全稱為Ultra Wide Band,是一種超寬帶無線載波通信技術。
UWB不同于傳統的通信技術,它通過發送和接收具有納秒或微秒級以下的極窄脈沖來實現無線傳輸的。由于脈沖時間寬度極短,因此
發表于 03-07 15:02
UWB測距模塊UWB3000Fxx Demo功能演示版操作說明
UWB3000Fxx Demo板搭載了1個UWB前端模塊(UWB3000F00或UWB3000F27)1個顯示屏及其操作按鍵。用戶可通過操作界面來配置模塊參數、并且測試相關的功能。其中






 工商網監
工商網監
評論