 中國ADAS突圍的差異化道路:打造更懂中國駕駛場景的感知算法
中國ADAS突圍的差異化道路:打造更懂中國駕駛場景的感知算法
引言
2016年特斯拉的致命事故讓人們意識到了精準感知的重要性。一個關鍵目標未識別,就會導致車毀人亡。
中國駕駛場景的特殊性,決定了必須有本土化的感知解決方案,才能滿足自動駕駛的高可靠性要求。提供專門針對中國駕駛場景開發的視覺感知算法成為中國創業公司打造ADAS方案差異化競爭力的一個重要切入點。通過全面掌握國內駕駛場景,并建立最符合國情的數據樣本庫,用更懂中國駕駛場景的感知算法幫助自動駕駛在國內的落地。
自動駕駛致命事故的啟示:可靠的感知是自動駕駛安全性的基石
2018年3月, Uber自動駕駛測試車在亞利桑那州測試時造成一名女子死亡(圖1), 這是全球首起自動駕駛致命事故。
美國國家運輸安全委員會近日披露,導致事故的主要原因是Uber自動駕駛系統無法準確識別在人行橫道以外出現的行人。自動駕駛系統數據顯示,車輛雷達在碰撞發生前大約6秒時觀測到這名推著自行車穿過馬路的行人,當時汽車時速69公里,系統反復將其識別為不明物體、車輛、自行車等(圖2)。
特斯拉Autopilot致命事故分析
2016年,美國一輛特斯拉Model S電動汽車在途徑十字路口的時候,撞上了一輛正在左轉的卡車,這是特斯拉Autopilot系統發布以來的第一起致命事故。


圖3 特斯拉Autopilot系統未能檢測到側面行駛過來的卡車
特斯拉指出:“在強烈的日照條件下,駕駛員和Autopilot系統都未能檢測到拖掛車的白色車身,因此未能及時啟動剎車系統。由于拖掛車正在橫穿公路,且車身較高,這一特殊情況導致Model S從掛車底部通過時,其前擋風玻璃與掛車底部發生撞擊。”
一個關鍵目標未識別,就會導致車毀人亡。慘痛的教訓讓人們意識到了精準感知的重要性。
來自中國特色駕駛場景的挑戰
國內的道路交通狀況,跟國外相比,有很大區別。
一方面,道路更加復雜且不規范,因此國外開發的視覺感知算法,需要針對國內道路進行專項的訓練和加強,才能獲得較為理想的感知結果。
另一方面,關于交通參與者(車輛、行人、騎行者)方面,目標類型更加“中國化”(比如馱著奇形怪狀貨物的快遞電動車),且在規則的遵循上也缺乏共識化的路權意識,因此既要針對國內特色的異形目標進行專項識別,也需要加強“提前”感知的能力,比如在車輛或行人目標只暴露出一部分時就能夠識別,否則在其他司機進行強行加塞等侵略性駕駛時,自車容易與不守規矩的目標車輛發生碰撞。
下面我們將從道路設施和交通參與者兩個維度,分析中國駕駛場景的特殊性。
國內道路設施的特殊性
在國內,雖然現代化的高速路、城市高架路越來越普及,但是也存在很多老舊的、非結構化(圖1)的甚至不合理的道路設計(圖2),這些場景已經大大增加了視覺感知的復雜度。
上圖展示的非結構化路段,再加上交通參與者頻繁地進行道路穿插,對自動駕駛系統視覺感知算法目標識別的全面性、實時性和準確率都提出更高的要求。
另外,如圖2所展示的,國內有不少的十字路口直行道有錯位設計,比如進入路口時會多出一條車道(為了增加路口車流量,疏通交通);或者車道在進入十字路口時為直行道,在出十字路口時對應的竟是左拐車道。這種流行的錯位設計,會徒增許多并道匯流需求。這就更加容易導致車輛在十字路口進行變道,人為加劇國內變道頻繁的現象,給感知能力帶來挑戰。
相比于國內的道路交通狀況,我們再對比一下歐美在“城鄉結合部”、繁忙十字交通路況、高速公路以及普通城市道路上的場景復雜度(圖3)。
從上圖可以感受到,國外的所謂復雜道路場景,相比于國內來講,還是相對簡潔明了的。這歸功于良好的道路規劃和清晰的路權意識。如果基于這種“簡化”場景進行感知算法的開發,很難覆蓋國內的極端情況。然而事實情況是,目前國內主流的視覺感知算法,都是來自Mobileye等國外公司,且開發場景也基于國外駕駛場景。
除此之外,國內還存在不少國外較為少見的交通信號燈和交通標志。上文提到國內道路設計的問題,事實上,正是由于道路問題導致交通疏導非常依賴于紅綠燈及交通標志的支持。而為了滿足各種道路指引需求,國內的紅綠燈設計可謂五花八門,如下圖。
除了紅綠燈和交通標志,國內還常用漢字注釋來的引導交通秩序,比如道路旁的漢字立牌、車道中的漢字指示等。這些場景的攻克很難依靠國外企業,只能依靠本土企業,立足國內場景,解決本土需求。
國內交通參與者的特殊性
國內的一些交通參與者,在國外非常少見。典型的如城市道路中騎電動車頻繁穿插的快遞小哥,以及城鄉結合部存在的各種“異形”交通工具,在識別上有一定難度,有漏檢現象產生,需針對性的訓練。而類似的情況在國內很多,如果能夠立足國內場景,及時補數據,就能夠更快地覆蓋并提升感知性能。
另外,國內的高速公路及城市高架路等封閉道路常有行人等非機動車目標出現,這對行人的遠距離準確檢測提出了非常高的要求。如果算法在國外沒有針對這種少見的場景進行專項訓練,一旦實際運行過程中出現,是很危險的。
如何打造更懂中國場景的視覺感知算法?
地平線自2015年成立以來,便積極扎根國內,基于國內道路視覺數據構建自己的圖像樣本庫;且針對典型中國場景進行擴充和訓練,有針對性地優化了視覺目標感知的全面性、實時性,同時提高了關鍵特色目標的準確率。其中,全面性方面,地平線感知算法可支持10類動態目標感知、53類靜態目標感知、23類語義分割;實時性方面,支持1080P @ 30 FPS;準確率方面,關鍵區域車輛檢測率大于99.6%,尤其是行人檢測方面,檢測距離達到70米,檢測率超過99.1%,誤報率小于1次/百公里。除此之外,地平線也建立了長效機制,保證及時升級對新挑戰場景的感知能力。從技術角度看,依靠對國內交通更理解的本土開發人員,再加上對本土場景庫進行持續擴充迭代,才能開發出更匹配中國國情的算法。具體來說,包括:
針對國內交通工具的特點,地平線擴大(或本土化)道路目標識別種類,加入類似老人代步車、裝滿快遞包裹的快遞電動車/三輪車等中國特色交通工具,有效幫助城市領航等高級別自動駕駛功能,以及城鄉結合部的十字路口預警等功能在國內的落地;同時針對中國行人和騎行者特有的行走、騎行特點,有效增加了對行人的感知準確率;
針對國內非結構化道路較多以及道路設計不合理、十字路口車道線復雜的特點,地平線進行了本土化優化,提高了車道線的感知能力,并擴大了感知范圍;針對中國特色的交通信號燈和交通標志方面,地平線擴大(或本土化)對國內道路和車道特點的感知識別能力。例如,增加對帶箭頭等非標準紅綠燈的感知識別;考慮地面失效箭頭仍舊由痕跡的問題,避免誤報;逐步加強對臨時交通標志安裝位置歪斜、角度畸形等國內實際場景的識別能力,避免關鍵信息的漏檢。再加上國內道路設計不合理,交通參與者嚴重依賴交通標志的引導,因此對于國內特色交通標志的感知能力,是地平線重要努力方向,以獲取更多有價值、置信度高的交通信息,助力自動駕駛在國內的落地進程;
針對國內交通參與者缺乏交通共識導致的道路混亂、目標運行軌跡難以預判的情況,地平線算法加強了對“鬼探頭”等目標未露出全貌時的目標識別能力,力爭提前檢出危險關鍵目標,給車控算法(AEB-P、AEB-C等features)提供更加及時的目標信息。同時增強對任意角度目標(機動車、非機動車等)的識別。
發布評論請先 登錄
相關推薦
運營商如何實現差異化連接

RISC-V在中國的發展機遇有哪些場景?
「騰訊IoT Video+微信小程序」覓感貓眼方案助力鎖廠打造差異化產品優勢

江蘇移動攜手華為率先完成全省范圍智能差異化體驗保障商用驗證
鴻蒙ArkUI-X平臺差異化:【運行態差異化(@ohos.deviceInfo)】

毫末和高通聯手官宣,首批8620量產智駕產品開啟合作

探索IPE差異化體驗,助力浙江移動網絡價值變現
華為攜手中國移動浙江公司 實現全球首個5G-A核心網智能差異化體驗保障
用電容式觸摸感應技術實現HMI差異化解決方案
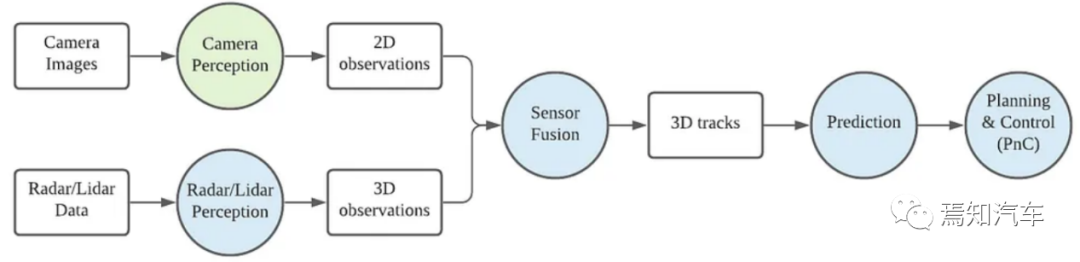
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
綠展科技首創采集區點亮發光指紋識別模組,3種發光模式助力智能門鎖廠家切入高端賽道實現差異化競爭
自動駕駛感知算法提升處理策略





 工商網監
工商網監
評論