 采用STM32F103VBT6處理器實現水下無線能量傳輸系統的設計
采用STM32F103VBT6處理器實現水下無線能量傳輸系統的設計
隨著科學技術的發展,我國對海洋的科考有了長足的發展。本文結合“深海抓斗”、“深海淺鉆”等海洋科考設備對其供電系統進行改進。目前多數水下設備都使用電池供電,也有部分進行電纜傳輸。本文通過對電源系統進行改進,以無電纜連接實現能量傳輸,減少對儀器設備的束縛,配合水下非接觸式耦合信息傳輸,實現“無線”水下設備,為海洋科考實驗提供更加優越的實驗環境。同時,無接觸的能量傳輸可以有效地避免因為電源插口外露、電纜拖曳斷裂帶來的安全隱患,提高系統的安全性。
常見的無線能量傳輸方式有三種:電磁感應、電磁輻射、電磁諧振。而耦合器主要有兩種形式:導軌形式、柱體形式。本設計重點闡述利用電磁耦合方式的設計方法,并提出優化策略實現水下的設備供電。
1 、水下無線能量傳輸原理
根據麥克斯韋方程,變化的電場可以產生磁場,而變化的磁場又可以產生電場。本設計基于此基本原理,利用電磁耦合器件,實現電—磁—電的轉換,其中的磁是在水中傳播。同時針對水中電導率較大的情況進行模型優化。
2、 系統構成
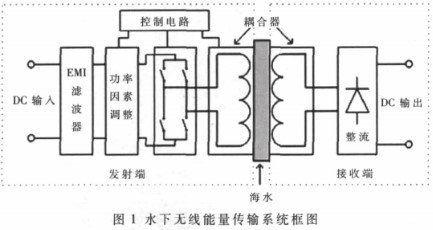
水下無線能量傳輸系統可分為三大部分:高頻逆變和后端的整流電路、控制電路及耦合器。高頻逆變和后端的整流電路可對控制信號進行驅動放大用以控制逆變電源;控制電路可產生PWM控制信號,同時根據電路的狀況進行過壓保護處理;耦合器是實現能量水下隔離傳輸的重點,其設計的好壞對傳輸效率有很大的影響。系統框圖如圖1所示。
2.1高頻逆變電路
本設計采用的是全橋整流電路實現高頻逆變,全橋逆變效率雖然不高,但實現的逆變功率較大。為此,選用了MOSFET功率器件,能夠在MOS管發熱損耗較少的情況下,實現大功率的能量傳輸。MOS管的開關驅動電路由IR公司的驅動芯片與門級關斷鉗位電路組成。IR2110是IR公司推出的帶自舉的低成本驅動芯片,廣泛應用在各種MOS管與IGBT驅動電路中,上臂自舉能減少所需的驅動電源數目。門級關斷鉗位電路是用兩級MOS管組成反相器。驅動電路的設計關鍵點是選擇自舉電容C1與上拉電阻R23。在Q13關斷時C1能被快速充電,開通Q14,把Q13的柵源極電壓控制在門級閾值電壓以下,所以C1與R23構成的充電電路時間常數要小,以便實現快速關斷,減少開關損耗。在Q13、Q15開通時,Q14始終保持在閾值電壓以下,電容C1通過R23對橋的左邊放電,但Q13、Q15的電平仍然要保持在高電平,所以R23的阻值要大,C1值要小,以減小由D13、R23、Q15構成的電路電流和減少自舉電源的功耗。在實際電路中采取犧牲輔助電源的部分功耗,R23選取500 Ω,便能取得一個較好的效果。全橋MOS管驅動電路如圖2所示。
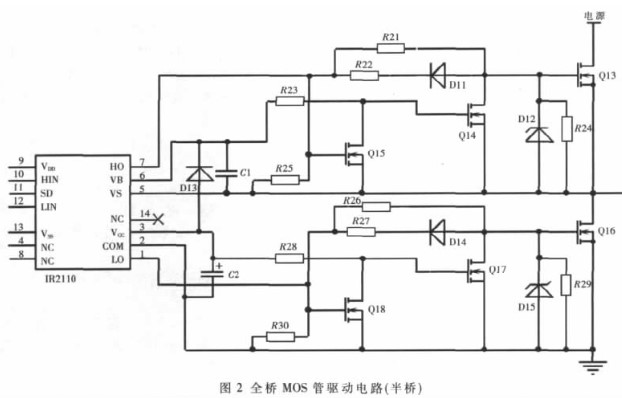
通過示波器觀察可以看到驅動電平已沒有常見的下橋干擾毛刺(下臂的驅動電路同理)。在Q14柵極上的R21、R22、R24、D11構成電路對驅動電壓進行防震蕩處理,D11加快電平下拉。D12、R24在門級鉗位電路中,當Q13柵極上有毛刺且超過15 V齊納而被擊穿時,起到保護Q14的效果。同時開關的13 V電平跳變更加快速,Q值更高,可減少開關損耗。
2.2 控制電路
本設計采用STM32F103VBT6為主控芯片。該芯片是ST公司推出的一款基于Cortex-M3內核的高性價比ARM處理器,最高主頻可達72 MHz;其自帶3通道的互補6路輸出定時器,選用其中2通道與DMA功能一起使用,能有效地實現輸出全橋PWM控制,同時其自帶的多通道12位AD可以滿足系統的各種參量的測量需要。
實現過流過壓保護,可在左右臂的下臂接地處串接0.1 Ω的康銅電阻,再用LTV274運放放大其兩端的電壓后,接到STM32的自帶12位AD腳進行電流監測。同理對輸入的直流電壓用電阻分壓后接到AD腳。當檢測到超過預設值(電壓500 V,電流3 A),將關斷信號發送給兩片IR2110的DS端,關斷MOS管,并關閉輸入電源,直到電壓恢復到較低的水平(對應的電壓<10 V,電流<0.1 A)后重新開啟系統。
2.3耦合器
耦合器的材料選取常用的變壓器材料有硅鋼、鎳鐵合金、鈷鐵合金、非晶體金屬合金及鐵氧體。考慮到頻率比較高,而且是大功率傳輸,選取鐵氧體磁芯為設計材料。根據耦合器能量傳播的特點,要保證磁路是開放對稱的,以有利于能量的傳輸,選取實驗磁芯的外形有PC型、RM型、GU型,同時要考慮磁芯所能承受的最大功率,本文的功率為視在功率,是輸入輸出功率的和,而體積過小的磁芯進行大功率傳輸將面臨磁芯溫升等問題。
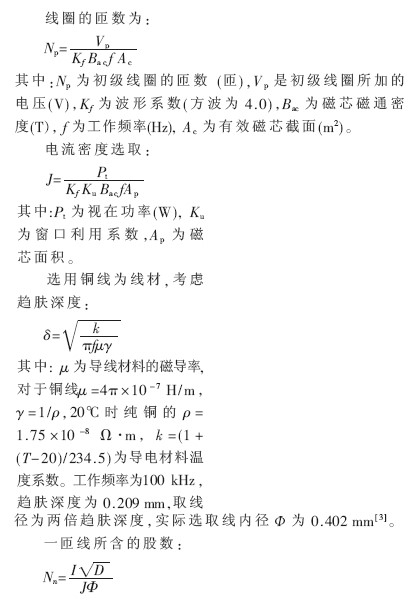
其中:D為電壓導通的占空比,實現計算時最大值可取 0.5。代入相關參數可知至少需要4股線。
根據計算所得的模型參數,進行有限元建模分析。有限元分析是一種目前在工程上較為實用的分析方法,其基本的思路就是將原本復雜的整個模型分解成較為簡單的小區域,再加上一定的邊界條件限制,即可以求出一些小區域的解,同時解可與邊上的小區域共享,最終求得整個模型的近似解。
3 、仿真與實驗結果
圖3所示為GU型磁芯,以及繞線、1/2水下截面的有限元進行區域劃分后的狀況。其磁導率采用的參考文獻[4-5]的模型,取有球型進行仿真。假設下端的磁芯為發射端,上端為接收端。仿真結果顯示了下端磁芯線圈在200 V、100 kHz電源作用下水中的磁場分布狀態。在大氣隙情況下,有比例大的磁力線未經過次級線圈,所以效率必然較低。至此改變頻率、電壓、氣隙等參數,重新仿真直到最優結果。
圖4所示為輸入電壓對輸出效率和功率的影響,采用的是GU50磁芯,在水中輸入100 V、100 kHz電壓,氣隙為5 mm。
圖5所示為在相同條件下,耦合磁性的電感進行改變后的耦合輸出效率。
圖6所示為系統實物圖,圖中上方是驅動電路部分。電路工作時,直流電源由PIN進入,經過高頻逆變后,輸入至POUT到磁芯。采用PC74磁芯在約2 cm的氣隙下點亮60 W燈泡。
本文論述了基于電磁耦合的水下無線能量傳輸系統的設計與優化方法。針對驅動電路部分詳細論述了一種實現較高功率的中高頻逆變電路。同時提供了有效的耦合器設計方法。本系統經過水下驗證,實現了最大電壓300 V、最大輸出電流2 A,在5 mm氣隙下實現最大輸出功率為350 W。
責任編輯:gt
-
處理器
+關注
關注
68文章
19165瀏覽量
229123 -
無線
+關注
關注
31文章
5430瀏覽量
173080 -
電磁感應
+關注
關注
17文章
809瀏覽量
57978
發布評論請先 登錄
相關推薦
stn32f103vbt6和stm32f103vct6的區別
stm32f103vbt6問題
回收STM32F103VBT6 收購STM32F103VBT6
STM32F103VBT6介紹
基于STM32F103VBT6配置看門狗
使用STM32F103VBT6來做GPS終端
STM32F103VBT6微控制器有哪些應用
STM32F103VBT6的核心板PCB和原理圖

使用STM32F103VBT6進行射頻加熱溫濕度監測系統設計的資料說明

給大家推薦一款國產替代STM32F103VBT6的MCU






 工商網監
工商網監
評論