") 如何基于STM32的四軸飛行器進(jìn)行學(xué)習(xí)
如何基于STM32的四軸飛行器進(jìn)行學(xué)習(xí)
學(xué)習(xí)嵌入式開(kāi)發(fā)的軟件,或者硬件工程師,動(dòng)手實(shí)踐非常重要,理論 + 實(shí)踐才會(huì)達(dá)到事半功倍的效果。
今天就給大家推薦由西安小馬哥帶來(lái)的DragonFlyV2開(kāi)源四軸飛行器,同時(shí)文末有福利:贈(zèng)送四軸飛行器 + 配套教程。
如果你能親自學(xué)習(xí)完本文說(shuō)的『基于STM32的四軸飛行器』項(xiàng)目,我覺(jué)得你已經(jīng)比一些工作1年,甚至2、3年的工程師都厲害。
一、DragonFlyV2飛行器介紹1.DragonFlyV2配置
2.DragonFlyV2與DragonFly(第一代)配置對(duì)比
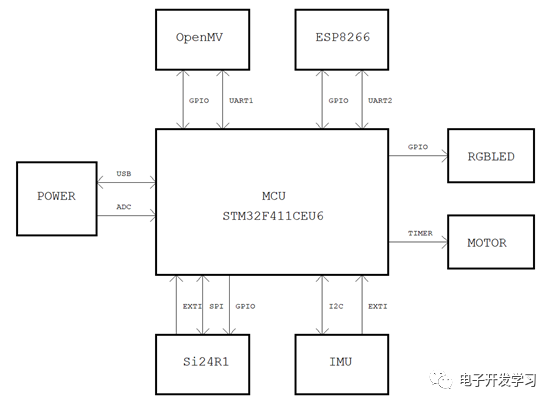
3.DragonFlyV2硬件架構(gòu)圖
4.DragonFlyV2頂層走線層視圖
5.DragonFlyV2層疊結(jié)構(gòu)示意圖
6.DragonFlyV2俯瞰圖
說(shuō)明:
DragonFlyV2開(kāi)源四軸飛行器PCB設(shè)計(jì)軟件從AD更換為Cadence,并且開(kāi)源全套Cadence的工程;
二、課程:DragonFlyV2開(kāi)發(fā)學(xué)習(xí)攻略
DragonFlyV2開(kāi)發(fā)學(xué)習(xí)攻略由小馬哥團(tuán)隊(duì)精心打造,本節(jié)的課程內(nèi)容才是重點(diǎn),也是核心。
這套課程價(jià)值199,文末會(huì)贈(zèng)送給大家,注意看說(shuō)明。
包含四大項(xiàng):
學(xué)習(xí)方法論
資料包介紹
教程內(nèi)容
常見(jiàn)問(wèn)題解答與匯總
1.學(xué)習(xí)方法論
2.資料包介紹
3.教程內(nèi)容
這一節(jié)是精華,包含:
硬件設(shè)計(jì)課程
STM32入門
姿態(tài)解算
通訊協(xié)議
飛控算法
ESP8266開(kāi)發(fā)
卡爾曼濾波專題講解
從底層基礎(chǔ),到協(xié)議、算法,再到應(yīng)用,相信有經(jīng)驗(yàn)的人都知道,如果學(xué)會(huì)了這些內(nèi)容,功力有多深厚。
這些課程部分截圖:
4.常見(jiàn)問(wèn)題解答與匯總
-
芯片
+關(guān)注
關(guān)注
453文章
50387瀏覽量
421782 -
嵌入式
+關(guān)注
關(guān)注
5068文章
19014瀏覽量
303226 -
四軸飛行器
+關(guān)注
關(guān)注
55文章
206瀏覽量
51108
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
雙軸測(cè)徑儀的四種樣式!
利用圖像處理板避障 讓小型飛行器像昆蟲(chóng)一樣靈巧

單軸測(cè)徑儀的四個(gè)常見(jiàn)應(yīng)用場(chǎng)景
中科宇航研發(fā)太空旅行飛行器,預(yù)計(jì)2028年開(kāi)展太空邊緣載人旅游
上海峰飛航空領(lǐng)先全球低空飛行器領(lǐng)域,展望2040年
基于非線性自適應(yīng)學(xué)習(xí)控制器的四軸飛行器避障方案
傳感器融合的工作原理
華為飛行機(jī)器人專利助推低空經(jīng)濟(jì)發(fā)展
空中客車使用MATLAB設(shè)計(jì)基于FPGA的機(jī)載深度學(xué)習(xí)處理器

什么是姿態(tài)傳感器MPU6050
【先楫HPM5361EVK開(kāi)發(fā)板試用體驗(yàn)】06-基于MPU9250的姿態(tài)解算
基于RT-Thread與滑模控制的微型多旋翼定點(diǎn)控制系統(tǒng)研究
探秘四軸按鍵測(cè)試機(jī):提高生產(chǎn)效率的利器

磁力計(jì)LIS2MDL開(kāi)發(fā)(3)----九軸姿態(tài)解算

四軸PID算法:?jiǎn)苇h(huán)和串級(jí),你搞懂了嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論